基于机载激光雷达点云的森林场景建模
2021-07-01王国利杨学博
王国利, 李 群, 杨学博, 王 成
(1.北京建筑大学 测绘与城市空间信息学院, 北京 100044; 2.中国科学院空天信息创新研究院 数字地球重点实验室, 北京 100094;3.北京建筑大学 建筑遗产精细重构与健康监测北京市重点实验室, 北京 102616)
在过去几十年内,森林资源的过度开垦和森林灾害的频繁发生破坏了森林原有的生态平衡,快速精确地获取森林空间信息,并及时提供森林资源的动态变化已成为林业相关部门的首要任务。传统的森林资源调查一般采用围尺、测高仪等工具直接测量树木的胸径、树高、冠幅等参数,需要攀爬树木或者将立木伐倒测量相关特征参数[1],无法满足大面积森林资源精准调查的要求。遥感(Remote Sensing, RS)以其快速、范围大、无接触性等优势为林业资源提供了新的技术手段。传统的被动光学遥感多通过卫星传感器获取森林数据的二维水平空间影像,无法得到森林植被的三维结构信息[2]。激光雷达(Light Detection and Ranging, LiDAR)是近30年来快速发展起来的一种先进的主动式遥感技术,能快速、精确获取森林植被空间三维坐标和林分信息等[3]。激光雷达按照搭载平台划分可分为星载、机载(飞机、无人机)、地面(基站、车载、背包式)激光雷达等[4]。林业资源精细调查多采用地面激光雷达和机载激光雷达2类,机载激光雷达对森林的垂直结构具有很强的获取能力,适用于大尺度的森林资源调查工作[5]。
基于点云的林木三维仿真模型构建是森林可视化管理及应用的核心,根据建模原理的不同可分为基于生长规则结构建模、基于结构与功能建模和基于参数结构模型建模。3种方法各有优劣:基于生长规则结构建模的方法比较注重植物生理的形态结构,建立模型效率较高且构建方式较为灵活,但是难以对形态结构特别复杂的植物进行三维建模[6-8];树木在不同环境下(如光照、 湿度、温度以及种植密度),生长机理模型、生物量及生长结构也有所不同,建立树木结构- 功能模型对实现树木信息管理具有重要意义[9-10];基于参数结构模型建模的方法主要包括基于几何结构法、基于二维图像法以及基于三维数据点云法。根据数据处理方式和建模方法的不同,可分为手工或半自动化方法建模和直接利用点云数据进行建模2类[11]。手工或半自动化方法建模的基本思路是从点云数据中提取树木点云模型的特征参数,然后将这些参数输入到现有的树木建模软件中完成三维几何植物模型的构建[12];而直接利用点云数据进行建模,则是利用一些算法对植被点云数据进行处理,提取出能够表征树木几何形态的特征信息,直接构建三维树木模型[13-14]。
针对传统森林树木建模空间精度低,可视化效果不佳的特点,本研究以某地区森林场景机载激光雷达点云数据为实例进行了森林场景三维重建。在提取地形数据的基础上,对试验区林木进行空间分割分类,依据不同种类树木特点进行针对性建模,结合树种的结构信息及分布进行森林场景三维重建。
1 机载激光雷达点云三维重建方法
1.1 试验机载激光雷达数据
机载激光雷达系统获取的原始数据主要包括激光点云、全波形文件和数字航宇影像。本文截取某林区机载激光雷达获取的三维点云数据作为研究对象,区域大小约200 m×200 m,实际包含约773棵树木,树种以乔木为主。点云包含3 625 181个点,点云平均密度约为90点/m2,点云整体概况如图1所示。
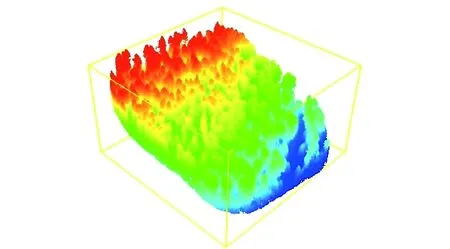
图1 研究区域点云数据Fig.1 Point cloud of research area
1.2 技术路线
本文建模技术路线如图2所示。首先对机载激光雷达点云数据进行去噪、滤波处理,将分离得到的地面点通过空间内插法生成地形模型,并导入SketchUp软件中模拟三维地形。然后对植被点云进行单木分割并提取多个单木参数(平面位置、树高、冠幅等),利用SpeedTree软件结合树木的剖面轮廓和单木参数生成相应的单木模型,改变随机因子调整树木形态,批量生成优势树种类型的树木。最后将地形模型和单木模型分层依次导入Lumion软件,在地形模型上根据单木的空间坐标调整单木模型的位置,添加环境等特效对森林场景进行渲染,从而实现森林真实场景三维构建。

图2 建模技术路线Fig.2 Modeling technological flow
2 三维点云数据处理
2.1 点云预处理
激光雷达获取的原始点云数据有地面点、地物点(植被)、噪声点。试验数据的噪声主要包括高位粗差和低位粗差,如图3所示。在点云魔方软件中可以通过探测离群点去除此类噪声。
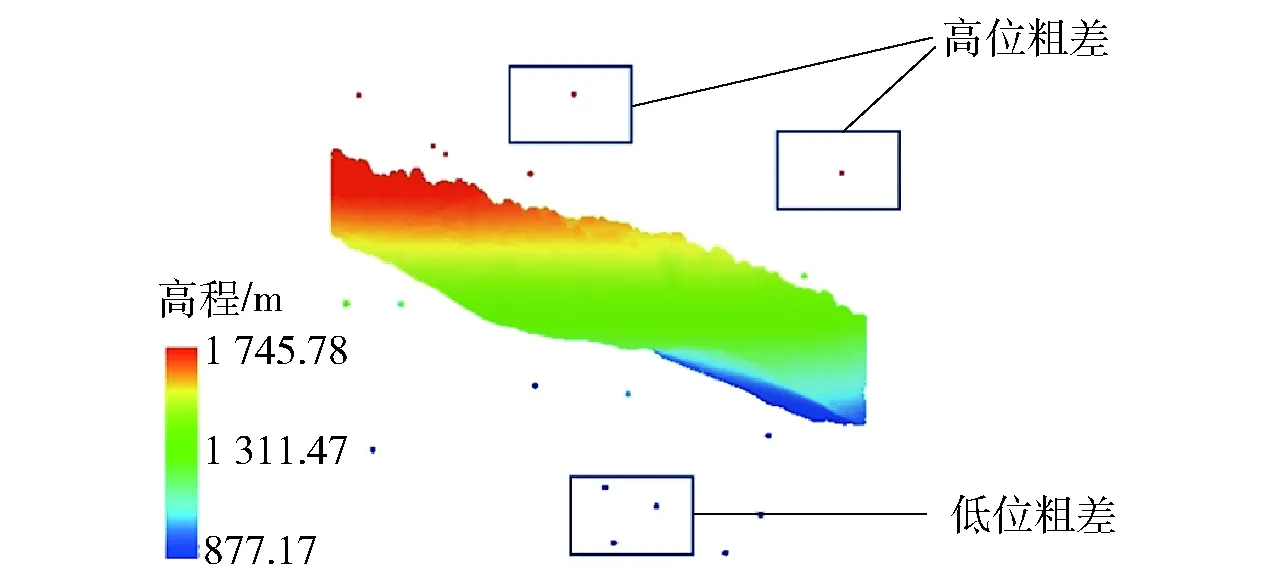
图3 点云数据噪声点Fig.3 Noise data of point cloud
本文采用渐进加密三角网滤波算法提取森林点云数据中的地面点和植被点。渐进加密三角网滤波方法结合了形态学滤波算法,能够较好地保留地形特征信息[15]。算法提取地面点的结果如图4所示。
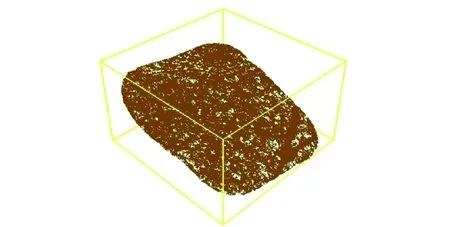
图4 地面点云滤波结果Fig.4 Filtering results of ground point cloud
将地面点分离后提取的非地面点云数据如图5(a)所示,为了进一步对植被进行单木分割,需消除地形起伏对点云数据处理过程的影响。归一化后的非地面点效果如图5(b)所示,图中每个点的高程值是相对高程值为0的平面的真实相对高度,若该点位于树木冠层顶部时,其高程值即代表树高。
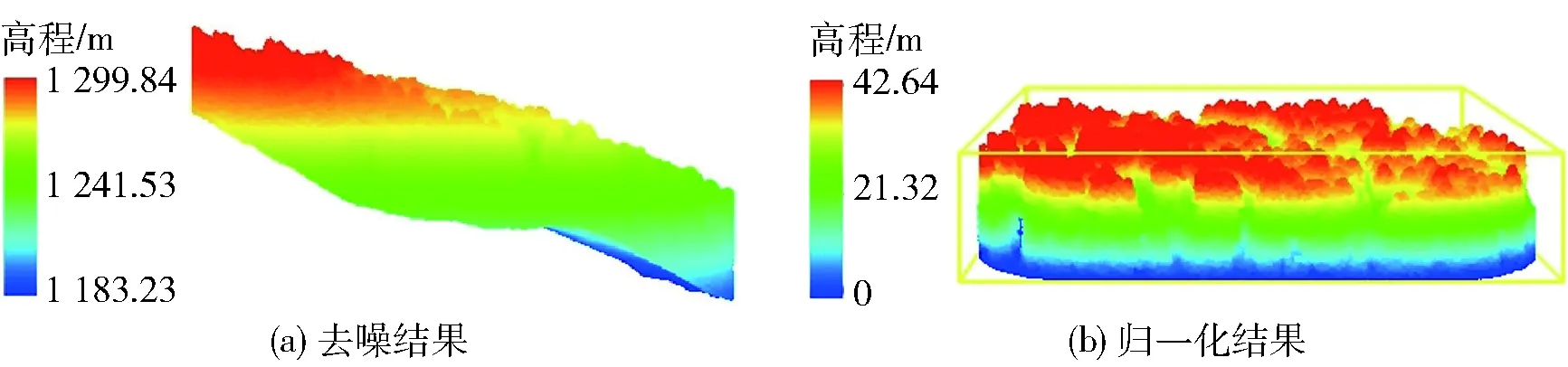
图5 点云去噪与归一化处理Fig.5 Denoising and normalization of non-ground point cloud (a. result of denoising; b. result of normalization)
2.2 单木分割
单木分割是对密集植被区域的单株树木点云进行分割,从而提取单木的X和Y坐标、树高、冠幅面积等参数的过程。单株树木的准确获取为森林场景三维重建的关键。点云魔方软件中单木分割流程如图6所示,分割方法按照所采用的数据形式可分为2类,分别为基于冠层高度模型(Canopy Height Mode,CHM)的单木分割以及基于点云数据的单木分割。层堆叠算法以1.0 m的高度间隔分割整个森林点云,将每一层点云分割开来,然后合并所有层产生的典型剖面。利用层堆叠算法识别局部最大值作为种子点,然后基于种子点识别的结果,采用点云分割算法进行分割。分割参数包含最小树高、高斯平滑因子和平滑半径等,平滑半径与平均冠幅直径大小相当,得到的单木分割结果如图7所示,圆形为树木的所在位置和冠幅大小。

图6 单木分割流程Fig.6 Individual tree segmentation process
点云魔方软件可在三维视图窗口直观查看点云分割结果,通过编辑种子点纠正错误漏分情况。利用基于CHM分割、基于点云分割和基于层堆叠种子点分割生成的单木分割结果(表1),以人工编辑的分割结果作为最终单木分割的结果。试验证明基于层堆叠种子点分割的精度最优,且其稳定性明显优于其他2种分割方法。
在林业资源调查中按照树高可将树木分为伟乔木、大乔木、中乔木、小乔木、灌木5类,研究区树种垂直分布及其数量见表2。
由表2结果可以看出在研究区域的森林中,3.0 m以下的树木未能被识别分割出来,树高在20.0 m以上的树木占71%,该研究区域内的森林生长茂盛密集。按照高度进行垂直分布情况如图8(a)所示。
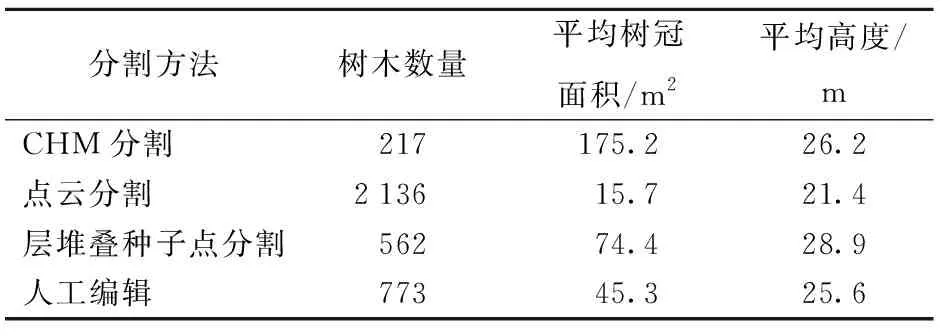
表1 单木分割的结果对比
将灌木、小乔木、中乔木、大乔木、伟乔木按照树木冠幅大小绘制其水平分布的X和Y坐标,如图8(b)所示。

表2 研究区域森林按照树高分类
根据树高分类对不同区间的树木提取点云剖面,如图9所示,在树木建模过程中需考虑结合树木的剖面轮廓进行三维建模。

图8 研究区域森林空间结构分布Fig.8 Spatial distribution of forest structure of the study area
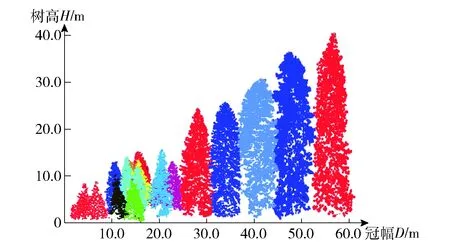
图9 按照高度分类提取树木点云剖面Fig.9 Extracting point cloud profile of trees by height classification

图10 地形等高线剖切及三维建模Fig.10 Contour section of terrain DEM and modeling of terrain
3 森林场景三维建模
3.1 地形三维建模
本文利用地面点云数据处理后生成的等高线进行地形建模。以5.0 m等高距进行剖切,提取等高线,随后用SketchUp软件的Fredo Toposhaper插件生成地形模型,软件可自动进行断线连接和等高线的平滑操作,结果如图10所示。
3.2 单木三维建模
Lumion软件自带丰富的植物素材库SpeedTree,利用SpeedTree建模时,树的主干树枝多由多边形网格来表达,树冠枝叶由Billboard面片来表达。建模流程包含骨架建模和材质纹理2部分,树木生成器可视为树木的生长规则集。节点是树木模型的重要组成部分,1棵树木是由1个发生器为起点生成若干个节点来构成,可通过编辑节点来生成不同形态的树木模型。图11展示了一个简单的生成器层次结构和相应的模型,图中左侧的生成器层次结构用来控制树木的结构组成。

图11 树木生成器的层次结构Fig.11 Hierarchical structure of tree generator
在完成骨架建模之后,采用真实拍摄相应树种的树叶枝干作为纹理,根据树木的点云轮廓和提取的单木参数,按照相应方法利用SpeedTree软件,对森林中的优势树种进行三维建模,得到的树木模型如图12所示。

图12 不同树种参数单木模型Fig.12 Single tree model with different tree species parameters
3.3 森林场景建模
将在SketchUp软件中建好的地形模型导入到Lumion软件中,并按真实比例调整地形模型大小及坐标位置,生成地形模型如图13所示。
Lumion中自带种类丰富的模型素材库如图14所示。结合单木分割提取的单木参数,包括平面位置、树高、冠幅直径等信息,参照表2树种高度分类区间,选择植入不同类型的树木,输入树木的坐标信息后,将单木模型放置在地面模型上。将所有分割树木放置,完成森林场景建模。

图13 添加材质的地形模型Fig.13 Textured terrain model
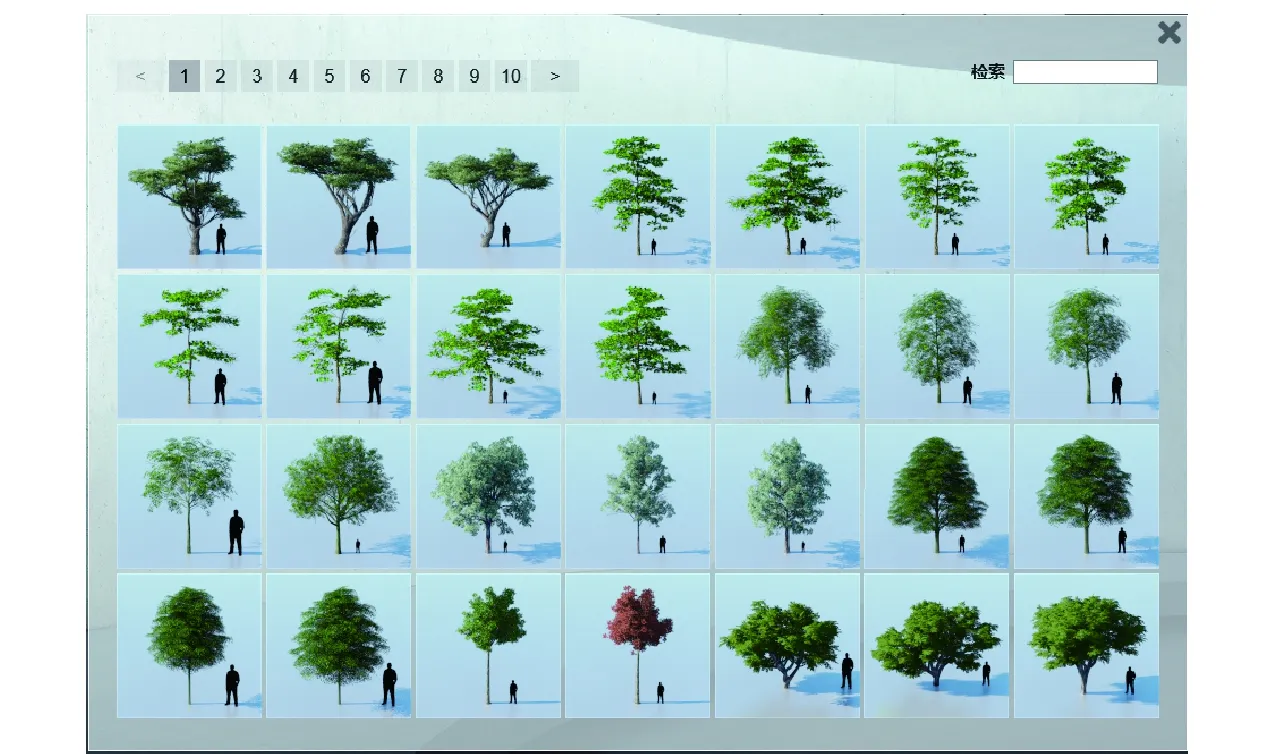
图14 Lumion树木素材库Fig.14 Tree material library in Lumion
利用Lumion软件景观模块还可以在不影响主体模型表现的前提下,添加树叶、草丛等环境要素点缀,最终三维模型整体效果如图15所示。

图15 森林三维场景模型Fig.15 Forest 3D scene model
4 结论
本文研究利用机载激光雷达精细建模方法,通过点云噪声滤除、地形特征点提取获取林区真实地形数据;采用层堆叠种子点分割方法提取林木的平面位置、树高、冠幅特征等参数,结合三维景观设计软件SketchUp和Lumion,实现了试验区森林场景高精度三维重建。试验结果表明,以机载激光雷达点云为基础进行森林场景重建,能够在保留三维模型地形精度及主要树种的位置、高度、冠幅等信息基础上,再现森林真实三维场景,对森林资源的评估、管理有重要参考价值。
本文试验过程中也存在如下问题:
1)数据方面,由于机载激光雷达数据缺乏树冠下层结构信息,无法提供林木在水平方向的相关信息,可考虑结合移动实景扫描技术,提升数据完整性,为建立更精细真实的森林模型奠定基础。
2)在点云数据单木分割方面,目前利用现有软件算法无法实现主要树种的精确自动分割,需要大量人工调整。后期仍需要针对不同树种机载点云空间分布及反射率等信息进行研究,提升单木分割精度与自动化程度。
