液压控制履带自走式温室三七收获机设计与试验
2021-06-29张兆国王一驰李汉青张振东薛浩田
张兆国 王一驰 李汉青 刀 方 张振东 薛浩田
(1.昆明理工大学农业与食品学院, 昆明 650500; 2.云南省高校中药材机械化工程研究中心, 昆明 650500;3.东北农业大学工程学院, 哈尔滨 150030)
0 引言
随着云南省三七产业的不断发展,三七采挖面积在逐年增长。目前,三七种植基地采用人工收获方式,其劳动强度大。现有根茎类作物收获机并不符合温室种植三七的特殊农艺要求,因此收获效率低、效果不佳。
我国于20世纪60年代开始引进根茎类收获机械,其中以花生、薯类收获为主,直到20世纪80年代,才开始对中药材收获机械进行研究。刘宝等[1]设计了MZPH-820型马铃薯收获机,并对马铃薯碰撞过程进行分析研究,获得了较好的根土分离效果。杨然兵等[2]对花生收获机理进行研究,研制的4HQL-2型花生联合收获机去土效果好、损失率低。张程[3]研发了温室履带行走底盘,该底盘适合窄行距工况作业。何晓芬[4]研制了折耳根收获机,整机结构简单、机动性好。文献[5-10]研制了多种牵引式和自走式的三七收获机,但是仍然存在收获效率低、转向阻力大、整体操作灵敏度不佳等问题。
本文借鉴根茎类收获机械先进技术,设计一种液压控制履带自走式温室三七收获机。整机采用履带式底盘,从而提高行走灵敏度和越障性能,对液压传动系统及关键部件进行设计,以期提高收获效率和收获品质,满足三七特殊收获需求。
1 整机结构与工作原理
1.1 三七种植农艺要求
三七种植平均气温为15~17℃,铺于三七仿生种植基地槽内的土壤分为3层,自上而下分为粗石粒、细石粒、种植土壤,如图1所示。对种植土壤进行含水率、密度、坚实度和基本力学参数测定,得到温室种植土壤基本物理参数:含水率为24.2%;密度为1.35 g/cm3;坚实度为0.76 MPa;内摩擦角为15.41°;摩擦因数为0.276;内聚力为15.855 kPa。
三七种植槽宽度为1 480~1 510 mm,每段种植槽长度为94 m,种植槽两边的混凝土路面宽约300 mm,混凝土路面距槽内土面60~70 mm,通过测量10组三七的株距和行距,可得种植株距和行距分别为20、15.7 cm,三年生三七主根深度在150~200 mm范围内,须根分布更深。
1.2 整机结构
考虑三七收获机非作业状态下存放及运输的方便性,设计由液压缸活塞杆的伸缩来控制挖掘装置的升降,非作业状态升起挖掘装置方便行走[11]。根据温室高度和种植槽参数,对整机的长宽高进行初步设计。整机由履带行走底盘、整体机架、挖掘装置、液压控制系统、外壳组成,采用升运链排装置可以更有效实现根土分离[12]。整机结构设计如图2所示,具体参数如表1所示。
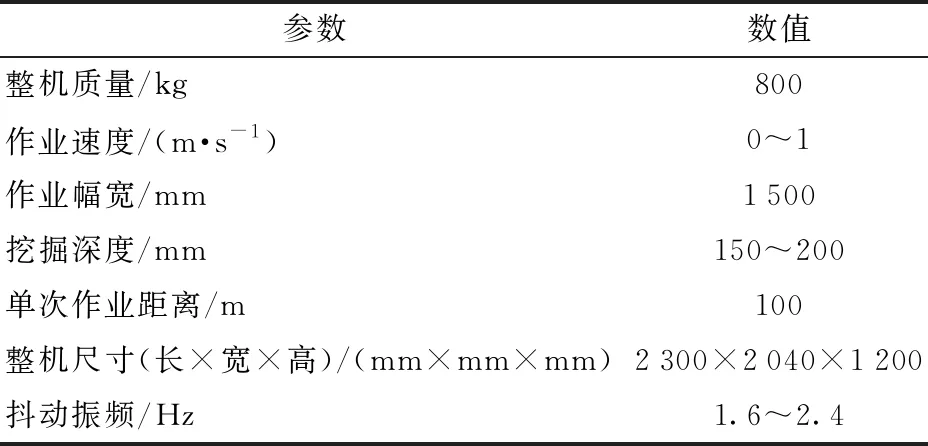
表1 温室三七收获机整机参数
1.3 工作原理
整机开始工作时,挖掘部件处于提升状态,通过液压缸控制挖掘部件的入土深度,启动控制升运链和履带的液压马达带动整机前进。至土槽起点时,降下挖掘部件,挖掘铲入土进行收获作业。挖掘出的三七经过分离装置完成根土分离,分离出的三七落到地面上,可后续进行人工捡拾。当完成收获过程,行至土槽尽头,此时液压缸活塞杆收回,挖掘部件提升,控制履带底盘使整机原地转向,进行下一畦收获。
2 底盘设计与仿真分析
2.1 参数设计
针对温室三七种植基地的参数和种植条件,通过实地调研可知行走路面为混凝土路面。橡胶履带受力面大,能减少因为过大的整机重量对地面造成的破坏,且能有效完成原地转向功能。因此选用橡胶履带作为行走底盘,并对其进行设计[13]。履带结构参数包括单边橡胶履带的宽度、接地长度和节距,驱动轮、支重轮、导向轮的直径、宽度等。履带尺寸计算公式为
(1)
(2)
(3)
(4)
式中c——履带带宽,mm
M——收获机质量,kg
L——接地长度,mm
r——驱动轮节圆半径,mm
z——履带节距,mm
m——驱动轮齿数,个
根据文献[14],引导轮半径取0.8倍驱动轮半径,支重轮半径取0.8倍引导轮半径。计算得到的履带行走机构参数如表2所示。
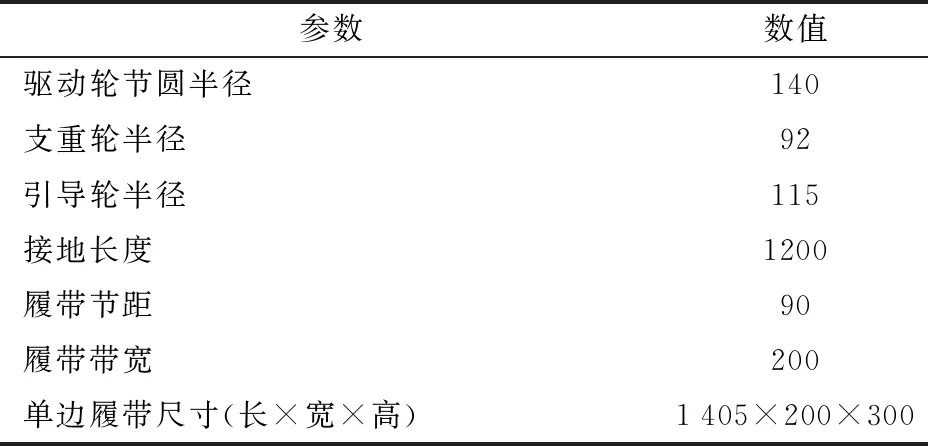
表2 履带行走机构参数
2.2 直线行走特性分析
对自走式温室三七收获机行走特性的研究本质是对挖掘收获作业的研究,同时也是对履带底盘动力系统的基础研究。在行驶过程中,样机受到内部阻力、外部阻力、牵引力与附着力等作用[15]。对其直行过程建立运动学模型,如图3所示。
因为样机在直行过程中,挖掘机构是升起状态,因此建立模型时不考虑,只考虑其自身重力。整机受到的力计算式为
F=Fa+Fb+Fc
(5)
F2=fG
(6)
式中F——内部总阻力,N
G——整机重力,N
Fa——驱动轮产生的摩擦阻力,N
Fb——引导轮产生的摩擦阻力,N
Fc——支重轮产生的摩擦阻力,N
F2——外部总阻力,N
f——摩擦因数,混凝土路面取0.06
计算可得内部总阻力为420 N,外部总阻力为2 980 N。通过RecurDyn软件进行仿真分析,对行走机构添加作用力,依据计算结果和实际,设定前进速度为0.5 m/s,作业中受到的工作阻力为2 500 N。通过图4可以得到履带机构刚开始直行时,驱动轮受到较大的扭矩,约为480 N·m,当进入平稳状态后(1 s),左侧驱动轮受到的扭矩与右侧驱动轮受到的扭矩基本相等,约为190 N·m,驱动轮节圆半径为140 mm,所以单侧履带需要的牵引动力约为1 357 N。样机的质心加速度围绕零点上下均匀波动,波动范围不大。正常收获作业过程中,直行稳定性满足要求[16]。
3 挖掘装置参数设计
三七挖掘铲已有较为成熟的研究[17],这里不再赘述。采用二阶组合式挖掘铲,能有效完成挖掘作业,提高挖掘效率。根据温室大棚三七种植环境,确定挖掘铲入土角为25°。三七在土中形态如图5所示。
三七挖掘机分离装置输送的根土混合物,经历分离、后抛等过程。对根土混合物抛起过程分析,确定分离输送装置的参数结构。根土混合物在升运链排的振动达到最大振幅时被抛起,对其进行力学分析,如图6所示。在升运链上时,受到垂直链排向上的惯性力F1和支持力FN,同时在向后输送时受到摩擦力f1。
分别在平行于升运链线速度方向和垂直于升运链线速度方向建立X、Y轴,当支持力FN为0,即根土混合物刚刚被抛起,建立方程
F1≥mgcosα
(7)
其中
F1=-ma
(8)
式中m——根土混合体质量,kg
α——升运链倾角,(°)
g——重力加速度,m/s2
a——根土混合物加速度,m/s2
根据文献[18],令升运链抖动时的最低点为位移零点,得到位移与时间t的方程,并对时间求二阶导数得到加速度
(9)
式中ω——升运链振动的角速度,rad/s
β——简谐运动初始相位角,(°)
A——升运链振幅,m
因为升运链和抖动轮的频率相同,由频率和角速度之间的关系得
ω=2πT
(10)
式中T——抖动轮频率,Hz
由式(9)和式(10)可以得到加速度a与抖动轮频率、升运链振幅之间的关系
a=-2π2AT2cos(2πTt+β)
(11)
取加速度a最大,将式(11)代入式(7),可以得到
2π2AT2≥gcosα
(12)
三七根土混合体被升运链抛起的最大高度为
(13)
式中v1——机具前进速度,m/s
由文献[19]可知,三七被抛起最大高度小于150 mm时,可以最大限度减少三七的损伤。三七收获机作业速度为0~1 m/s,升运链倾角为20°~30°。由式(12)和式(13)计算得到升运链振幅和抖动轮频率的关系为
AT≤0.17 m/s
(14)
根据分析可得,抖动频率和振幅影响三七后抛程度,并可在一定关系时,减少伤根率。若振幅和频率过小,会使得根土分离不彻底;若振幅和频率过大,则造成伤根率偏高。根据田间测试和式(14),选取升运链排宽度为1 320 mm,有效升运距离为1 200 mm。根据三七的平均长度和运动分析,设计链条排的间隙为40 mm。并依据升运链排的参数,确定相关参数,结果见表3。
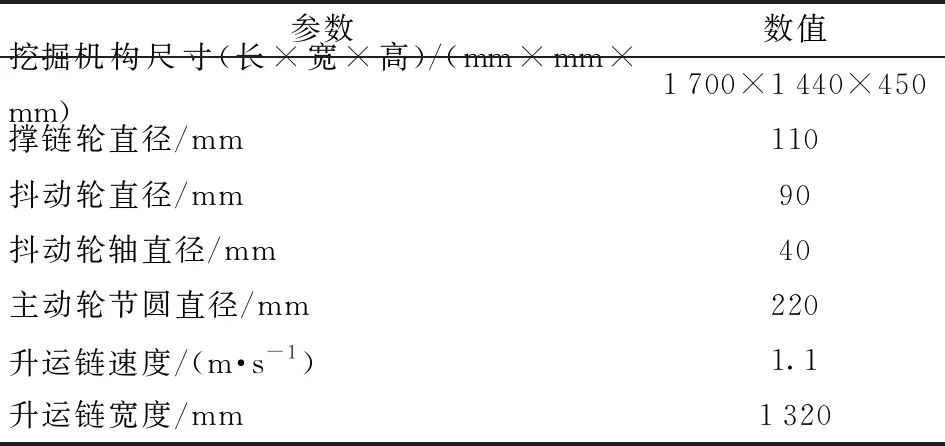
表3 挖掘装置参数
4 液压传动系统设计
与传统的机械传动相比,液压传动可以输出大转矩,使大吨位物体实现低速运动。同时在相同功率条件下,液压传动装置体积小、重量轻。自走式温室三七收获机采用全液压驱动方式,开式液压回路系统,整机使用双液压马达、旋转马达和液压缸来完成控制功能。传动系统设计流程图如图7所示。
4.1 行走方案
为了提高整机工作效率,收获机在工作时未产生偏移,前进和后退同步精度需要保障,为满足要求,采用低速驱动方案[20]。行走液压系统原理图如图8所示。
行走液压系统主要由液压泵、液压油箱、压力表、溢流阀、可调单向节流阀、三位四通电磁换向阀、二位四通电磁换向阀、分流集流阀和行走液压马达所构成。当三位四通电磁换向阀左端的1YA线圈得电时,行走液压马达在分流集流阀的作用下同步转动,从而带动收获机实现前进功能,同理可得当三位四通电磁换向阀右端的2YA线圈得电时,收获机实现后退功能。二位四通电磁换向阀的3YA线圈得电时,收获机实现右转弯功能,二位四通电磁换向阀的4YA线圈得电时,收获机实现左转弯功能。
4.2 升运链传动方案
进行传动方案设计时,需要考虑整机升运链所承受的负载不是固定值,所以在进行液压传动系统设计时必须有调速功能。为防止升运链不被土块卡住且能够高效工作,设计的旋转液压马达需要实现正反转。选取液压马达作为升运链执行元件,传动液压系统如图9所示[21]。
传动液压系统主要由液压马达、溢流阀、节流阀和三位四通电磁换向阀组成。驱动电机启动后带动液压泵工作,液压泵从液压油箱抽取液压油,然后经过电磁换向阀输送给旋转马达,三位四通电磁换向阀负责旋转液压马达的正反转,当三位四通电磁换向阀左端的5YA线圈得电时,旋转马达正转从而带动升运链正转,三位四通电磁换向阀右端的6YA线圈得电时,旋转马达反转从而带动升运链反转。为满足液压马达的工作速度可调,在马达的进油与出油口处分别装有可调节流阀。
4.3 升降系统方案
挖掘装置在整机工作前必须缓慢下降,使挖掘铲能够顺利进入土壤且可达到适宜的挖掘深度,所以在系统设计时要实现执行元件的运动速度可调。为使挖掘装置能够顺利地实现升降,所设计的系统必须具有过载保护、安全制动、自锁、卸荷和调速等功能。升降液压系统原理如图10所示[22]。
升降液压系统回路主要包括液压源、三位四通电磁换向阀、液控单向阀、升降液压缸。当驱动电机启动后带动液压泵工作,液压泵从液压油箱抽取液压油,然后经电磁换向阀供给升降液压缸,当三位四通电磁换向阀左端的7YA线圈得电后,液压缸的活塞杆伸出从而带动挖掘装置下降,三位四通电磁换向阀右端的8YA线圈得电后,液压缸的活塞杆收缩从而带动挖掘装置上升。
5 控制系统设计
本文设计两套控制方案,即本地操作和远程遥控方案,二者皆能控制整机的前进、后退、转弯以及挖掘装置升降和升运链传动等功能。本地操作通过控制按钮控制电磁换向阀来实现;远程遥控通过上位机发送信号控制电磁换向阀来实现。整体控制系统方案如图11所示[23]。
5.1 本地操作方案
本地操作采用在电气柜中安装相应的控制按钮,采用点控式的控制方法,选用中间继电器作为转换装置,输入端与控制按钮相连接,输出端与电磁换向阀、驱动电机和风冷机相连接。利用FluidSIM软件中的电控模块对本地操作方案进行设计,电控原理图如图12所示。
按下控制按钮S1时,中间继电器线圈K1得电,致使常开触点K1闭合,线路接通,则电磁换向阀7YA线圈得电,油路接通使液压缸活塞杆伸长;再次按一下控制按钮S1时,K1线圈失电,致使常开触点K1打开,电磁换向阀7YA线圈失电,即液压缸活塞杆伸长至合适位置,同理可知S2控制液压缸活塞杆收缩。具体功能见表4。

表4 接线端按钮功能表
5.2 遥控操作方案
根据收获机的工作过程,整机完成全部工作需要10个步骤,所以PLC的I/O口不少于20个。根据本地操作设计时的理论分析,远程遥控的输入设备为按钮,输出设备为中间继电器,利用GX Developer开发平台对系统软件进行设计。系统结构如图13所示[24]。
远程遥控所要实现的功能为:通过远程遥控操作可实现收获机的行走、挖掘装置升降及升运链传动等功能。远程遥控通过无线发射器对接收机发送指令,接收机将指令传给中央控制器单元,经过PLC语言判断来控制中间继电器的磁铁动作,进而控制电磁换向阀动作,从而使液压执行元件动作。
6 样机性能试验
6.1 行走特性试验
为了验证样机综合性能,在昆明理工大学校内温室大棚进行试验(图14)。对校内温室进行规范化处理,处理后的槽宽为1 500 mm,槽深为200 mm,种植槽长度为40 m。试验目的是为了检验整机设计是否合理,履带行走机构的行走、原地转向性能是否良好,液压控制动力是否满足要求。
在校内温室的土槽两侧标出两条履带行驶轨道,宽为40 cm,与石林三七种植基地行驶路面的宽度相同,令样机直行(图15),直行完成之后测出履带与行驶轨道的偏移距离,重复3次,其中向左偏移取正值,向右偏移取负值,测量结果为6、-8、-7 cm。
计算得到样机的平均偏移率为0.49%,设计的履带行走机构满足直线行走要求。
6.2 液压系统灵敏度试验
为测试收获机液压升降系统性能,在温室内对升降液压缸的运行速度进行了测试。以液压缸行程600 mm为极限位置,以液压缸静止至运行到极限位置所需时间为变量,得到液压缸活塞杆的运行速度。试验5次,分别记录液压缸活塞杆单次伸长与收缩到极限位置所需时间,试验数据如表5和表6所示。
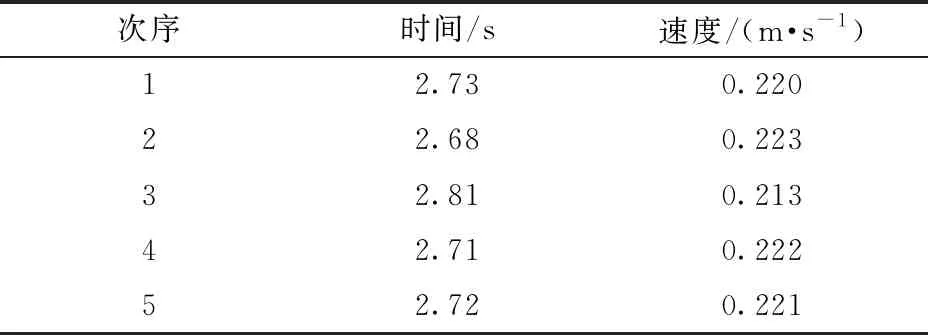
表5 液压缸伸长运行速度
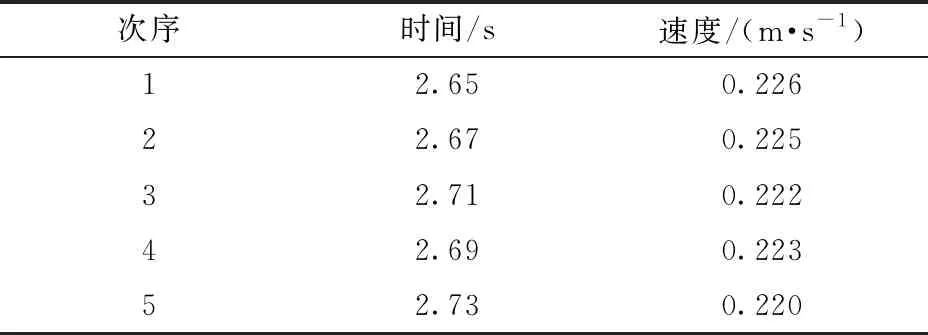
表6 液压缸收缩运行速度
由表5和表6可知,液压缸活塞杆伸长速度平均值为0.22 m/s,收缩速度平均值为0.22 m/s,液压缸整体实际测试速度与理论运行速度基本保持一致,在合理范围内存在少许误差。
分别用本地操作和遥控操作来控制整机进行原地转向试验(图16)。试验测试位于水泥路面,调节两边履带来实现原地转向,通过微调系统压力和流量的方法来改变整机转弯速度,试验结果表明,整机能顺利完成原地转向需求,转向半径与理论值相差不大。
6.3 田间收获试验
对自走式温室三七收获机的挖掘性能进行测试,试验地点为云南省石林三七温室种植基地。试验作业时,保持收获机行走速度为0.5 m/s,总作业测试长度为93 m。温室三七机械化收获的评价指标为生产率、损失率、伤根率。生产率计算式为
(15)
式中D——生产率,hm2/h
e——样机通过测定区所用时间,s
S——测定区长度,m
E——作业幅宽,m
三七收获过程中,损失主要指漏收及二次掩埋,一定测试面积内三七损失质量与总质量的百分比为损失率。
伤根率为一定测试面积内伤根质量和三七总质量的百分比,三七块根不完整或者有裂痕均定义为伤根。
田间收获后测量得总质量为64.9 kg,通过计算可以得到伤根率为1.77%,损失率为1.48%。参照文献[25]可以得到三七收获机评价指标。试验结果如表7所示,收获效果如图17所示,无明显埋根现象。
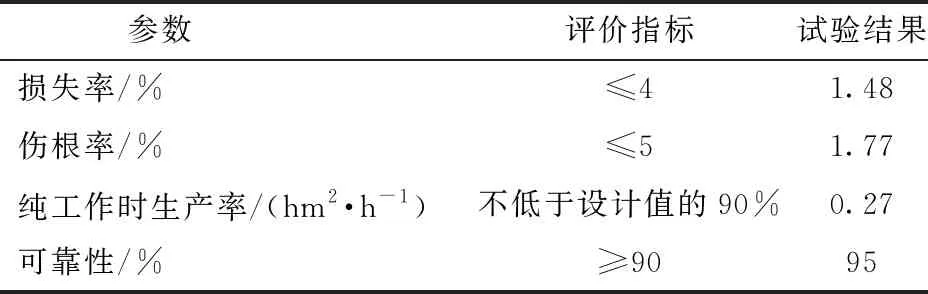
表7 三七收获机试验结果
试验证明,该温室三七收获机满足评价指标,整机性能达到设计预期标准,田间收获顺畅,满足三七收获的各项作业功能。
7 结论
(1)根据三七特殊的种植环境,设计了一种履带自走式温室三七收获机。该机能直线行走和原地转向,在大棚中能有效完成机械化收获作业。
(2)对履带式行走底盘进行参数设计,并建立理论分析模型,以根土混合物分离时运动学模型为基础,设计挖掘分离装置的结构参数。
(3)采用全液压驱动、开式液压回路系统,整机使用双液压马达、旋转马达和液压缸来完成控制功能。本地操作和遥控操作方案均可以有效完成行走、转弯和升降等功能,整体系统灵敏,液压动力满足要求。
(4)田间试验表明,该样机收获效率为0.27 hm2/h。损失率为1.48%,伤根率为1.77%。整机直线行走偏移量为0.49%,收获过程顺畅,各项技术指标均满足要求。