细长果蔬采摘软体气动抓手设计与参数优化
2021-06-29贾江鸣叶玉泽程培林胡润泽武传宇
贾江鸣 叶玉泽 程培林 胡润泽 武传宇,2
(1.浙江理工大学机械与自动控制学院, 杭州 310018; 2.浙江省种植装备技术重点实验室, 杭州 310018)
0 引言
近年来,随着中国经济的发展,劳动力紧缺对农业发展的限制已显现,特别是劳动密集型的果蔬采摘产业尤为突出,因此在果蔬采摘领域急需各种类型的采摘机器人[1-5]。由于果蔬柔嫩,在收获过程中有效减少果蔬损伤一直是农产品领域的研究热点[6-8]。在多数果蔬采摘作业中,均需通过采摘抓手对果蔬的夹持作用实现摘取。因此,避免夹持损伤成为实现采摘抓手无损采摘的重点和关键,农业采摘抓手对农业现代化发展具有重要意义[9-11]。
针对有效采摘不同果蔬的问题,诸多学者进行了农业采摘抓手的研究[12-16];这些研究设计的抓手对类椭圆形果蔬具有较大优势,但对大长径比果蔬的抓取仍存在较大困难。为了采摘黄瓜和茄子等大长径比类果蔬,文献[17]设计了黄瓜采摘抓手,该抓持器由2个基于气动柔性驱动器的弯曲关节构成,其机械结构简单、输出力较大,对黄瓜抓取成功率和断梗率较高,抓手的柔顺度有待进一步提高。文献[18]研究的黄瓜采摘抓手的夹持装置由两根夹持手指和吸盘构成,在收获过程中夹持手指承载主要载荷,吸盘起辅助固定作用,由于吸盘承受的载荷较小,在抓取过程难以实现稳定抓取。文献[19]设计了一种两指茄子采摘机器人抓手,其中夹持装置是由电机驱动的两根金属手指,该抓手能够实现3~6.5 cm茄子的抓取。文献[20]设计了茄子抓手,其真空吸附系统和四指配合使用能够实现对茄子的柔性稳定抓取。文献[21]针对黄瓜采摘设计了一种两指式抓手,该抓手由伺服电机驱动,其结构简单、控制方便,但对黄瓜表皮硬度有很高的依赖性。文献[22]针对海参捕获设计了一种水下远程遥控抓手,该抓手能够实现多个自由度的转动,并精准捕获海参。文献[23]设计的甜椒采摘机械手是由与齿轮连接的两根金属手指构成,其结构简单、运动流畅。以上果蔬采摘抓手均为传统的刚性抓手,其精密的驱动部件和传动部件降低了抓手在非结构化环境中应用的可靠性和耐久性,同时需要依靠精密的传感部件和复杂的传感策略才能实现对细长果蔬的无损采摘,因此限制了刚性采摘抓手的应用。
针对上述问题,本文借鉴藤曼卷曲现象原理,设计一种螺旋缠绕型软体气动抓手。以软体气动抓手的壁厚、腔室角和内腔室高度为试验因素,以该抓手的螺旋半径和螺距为优化目标,采用有限元分析和响应面分析法对软体气动抓手进行优化设计。
1 抓手设计与制作
由于部分农作物果实的形状为细长形且表皮较柔软、易损伤(如黄瓜、茄子、辣椒等),使用传统的刚性采摘抓手难以实现无损采摘[24-25]。受藤曼卷曲启发,设计如图1a所示的螺旋型软体气动抓手,以缠绕的方式紧密包裹细长果蔬。软体气动抓手的螺旋直径和螺距对抓取的细长果蔬的直径有重要影响,螺距决定了抓取过程中细长果蔬受力的均匀性。为设计螺旋型软体气动抓手的尺寸,以市场上水果黄瓜为典型抓取对象,并对水果黄瓜的几何特性进行测量。测量100根水果黄瓜的直径和长度,求取平均直径和平均长度分别为35 mm和150 mm。本文设计的螺旋型抓手长度L=200 mm,软体气动抓手腔室之间的距离s=1.6 mm,腔室之间通道的尺寸为b×b=2 mm×2 mm,软体气动抓手的宽度为W,高度为H,壁厚为t,腔室角为θ,内腔室高度为h。
目前,软体气动抓手的制作方法主要包括模具铸造法、失蜡法和3D打印一体成型方法,本文选用模具铸造法作为软体气动抓手的制作方法,制作过程如图2所示。首先,用3D打印制作所需的3个铸造模具(PLA-F170型, Stratasys),分别为模具1、模具2、模具3,并将模具1和模具2组装为模具4。其次,将脱泡液体硅胶倒入模具3和组装好的模具4中,并将其放入内部温度为60℃的真空干燥箱中固化2 h。从模具4中取出固化的软体气动抓手上层。然后,用脱泡液体硅胶粘合软体气动抓手的上层和下层,并将其放入内部温度为60℃的真空干燥箱中固化2 h。最后,取出制作完成的软体气动抓手,并在其端部插入气管。
2 有限元分析
通过仿真工具研究不同参数下抓手的变形情况。该抓手是由硅橡胶(超弹性材料)制作,在气压的作用下发生非线性大变形,传统基于小变形假设的线弹性理论将难以解释其变形过程。通常,硅橡胶材料的本构模型是基于材料的应力-应变关系与唯象理论建立的。通过单轴拉伸试验得到的应力-应变关系数据代入本构模型中拟合出模型参数,拟合结果能预测柔性材料的拉伸和剪切等力学行为并较准确地描述非线性材料的大变形特性。目前常用的硅橡胶材料的本构模型有Neo-Hookean、Ogden、Mooney-Rivlin、Yeoh、Arruda-Boyce、Blatz-Ko、Saint Venant-Kirchhoff等[26]。本文设计软体气动抓手的制作材料为dragon skin 30,文献[27]研究表明,Yeoh模型拟合出的材料常数更加符合材料的真实情况。Yeoh模型应变能函数为
Ψ=C10(IC-3)+C20(IC-3)2+C30(IC-3)3
(1)
式中Ψ——应变能函数
C10、C20、C30——材料常数,分别取0.1、0.119、0.000 604
IC——柯西-格林张量的第一主不变量
本文利用ABAQUS有限元仿真软件分析软体气动抓手的变形特性及抓取仿真。首先,使用三维建模软件SolidWorks建立该抓手的三维模型并保存为“.x_t”格式,将该模型导入ABAQUS的前处理界面中。其次,选择材料的本构模型为Yeoh模型,并分别设置材料常数C10、C20和C30为0.1、0.119和0.000 604。然后,为了适应结构复杂性,划分软体气动抓手的网格结构为四面体网格。由于该抓手的材料为不可压缩的硅橡胶材料,因此本文采用杂交单元的仿真模式。最后,限制该抓手前端面的变形,并在内腔室表面施加0.08 MPa的均布压强。以上设置完成后开始仿真,仿真完成后可在ABAQUS后处理面板查看变形仿真及抓取结果,如图3、4所示。
3 试验设计与结果分析
3.1 试验因素与水平
由初步的抓取试验可知,软体气动抓手的壁厚、内腔室高度和腔室角对其螺旋半径和螺距均有影响,以下使用响应面优化法以壁厚、内腔室高度和腔室角作为影响因素,以螺旋半径和螺距为优化目标对软体气动抓手的尺寸参数进行优化。通过单因素仿真确定软体气动抓手的螺旋直径为35 mm(水果黄瓜平均直径)时,其壁厚、内腔室高度和腔室角的范围分别为2~3 mm、8~12 mm和30°~60°。采用3因素3水平中心组合设计的Box-Behnken试验,壁厚、内腔室高度和腔室角编码如表1所示,并在最大气压为0.08 MPa(仿真气压)下分别开展螺旋直径和螺距的仿真优化试验。
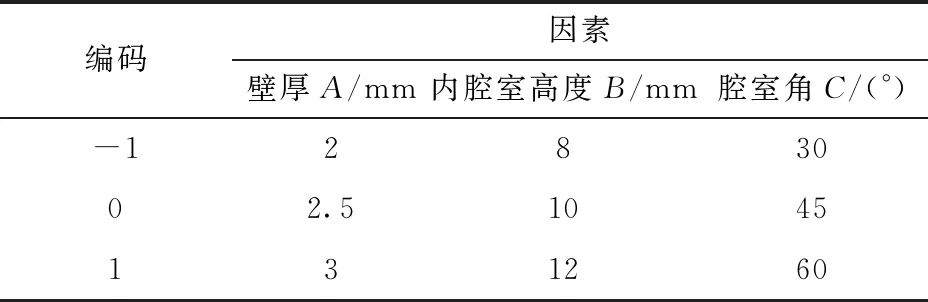
表1 响应面试验因素编码
3.2 试验方案与结果
采用Design-Expert 8.0(Stat-EaseIne,USA)进行试验设计、数据处理与统计分析。根据Box-Behnken试验结构对仿真优化试验进行设计,以各影响因素水平为自变量,以仿真半径与螺距为优化目标,试验结果如表2所示。
根据表2的数据样本,通过Design-Expert 8.0 软件得到仿真半径Y1与螺距Y2的二次多项式回归模型
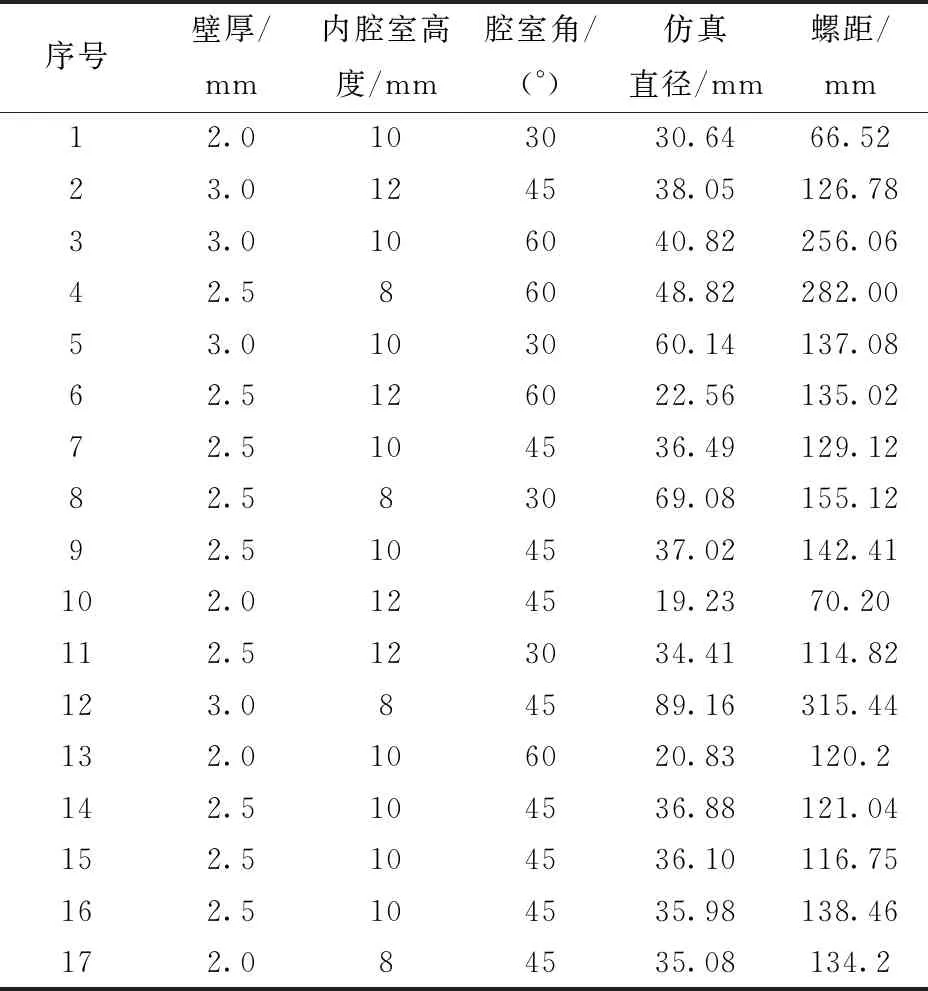
表2 试验设计方案及响应值结果
Y1=1/(0.027-0.01A+9.624×10-3B+5.564×10-3C-2.108×10-3AB-1.875×10-3AC+2.314×10-3BC+2.726×10-3A2-6.299×10-4B2+3.114×10-4C2)
(2)
Y2=1/(7.763×10-3-2.849×10-3A+2.204×10-3B-1.788×10-3C-5.19×10-4AB+8.31×10-4AC+3.994×10-4BC+1.268×10-3A2-8.429×10-4B2-3.933×10-4C2)
(3)
由表3和表4可知,两回归模型的P均小于0.01,表明回归模型高度显著;两模型失拟项的P>0.05,说明模型失拟性不显著,回归模型拟合程度高。由壁厚、内腔室高度、腔室角的P可判断3个试验因素对仿真直径与螺距都有极显著影响,试验因素对仿真半径的影响从大到小依次为壁厚、内腔室高度、腔室角,对螺距的影响从大到小依次为壁厚、内腔室高度、腔室角;仿真直径回归模型P<0.05,螺距回归模型P<0.05,表明3个回归项在回归模型中交互影响显著;两模型的决定系数R2分别为0.998 7、0.935 1,均大于0.93,表明各模型可以解释93%以上响应值变化,预测值与实际值之间具有高度的相关性,试验误差较小。变异系数分别为15.37%、2.09%,精密度分别为13.059、87.228,表明该仿真直径与螺距拟合回归模型具有较高的可靠性,因此可用模型对指数进行分析与预测。
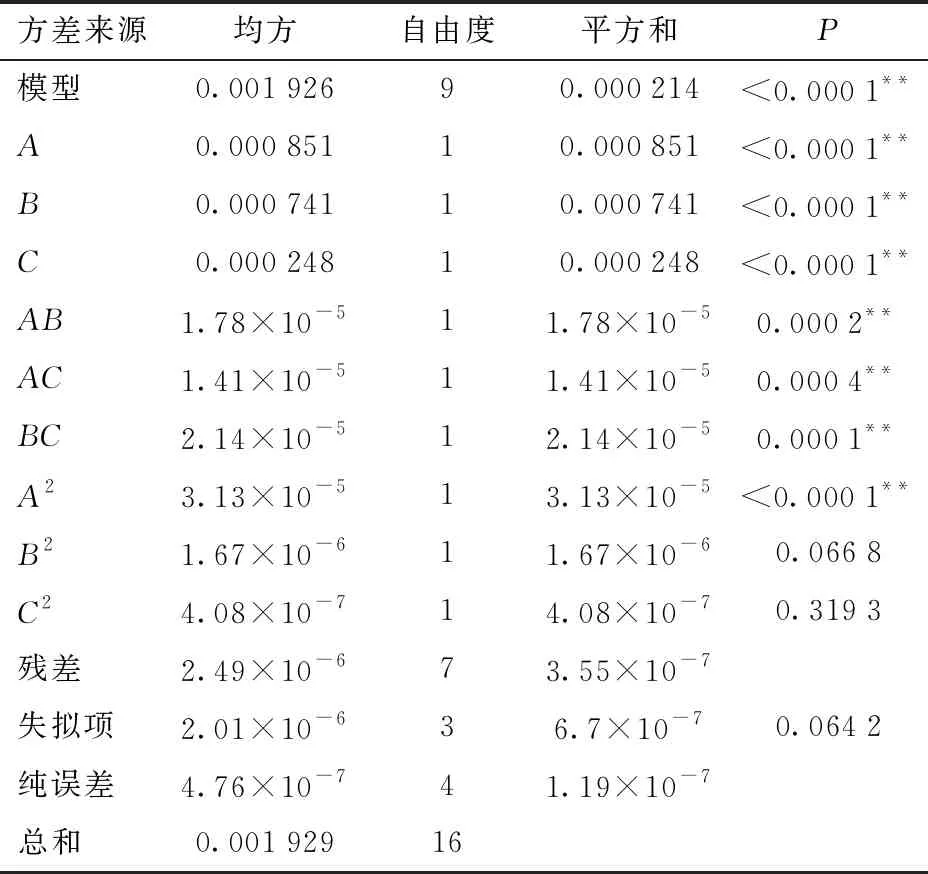
表3 仿真直径二次多项式模型方差分析

表4 螺距二次多项式模型方差分析
根据回归模型分析结果,利用Design-Expert 8.0软件绘制各因素交互效应3D响应曲面图。图5a为腔室角位于中心水平(腔室角C=45°)时,壁厚A与内腔室高度B对仿真直径Y1交互作用的响应曲面图。当腔室角C=45°时,仿真直径随着壁厚的增大与内腔室高度的减小而增大;在壁厚A较大(A>2.5 mm)时,随着内腔室高度的减小,仿真直径增大较快;当壁厚A较小(A<2.5 mm)时,随着内腔室高度的减小,仿真直径缓慢增大。当内腔室高度B=8 mm时,仿真直径随着壁厚A增大而快速增大,内腔室高度B=12 mm时,仿真直径随着壁厚A增大而缓慢增大,这是由于壁厚越薄驱动器上下两层的刚度差异越明显,导致在受力相同时,上层的变形效果较明显,从而上下两层形成位移差,软体气动抓手的变形半径越小。
图5b为壁厚位于中心水平(壁厚A=2.5 mm)时,内腔室高度B与腔室角C对仿真直径Y1交互作用的响应曲面图。当壁厚A=2.5 mm时,仿真直径随着腔室角C与内腔室高度的增大而减小;在腔室角C较小(C<42°)时,随着内腔室高度的减小,仿真直径增大较快;当腔室角C较大(C>42°)时,随着内腔室高度的减小,仿真直径缓慢增大。当内腔室高度B=8 mm时,仿真直径随着腔室角C增大而快速减小,内腔室高度B=12 mm时,仿真直径随着腔室角C增大而缓慢减小。
由图6a可知,降低内腔室高度和提高壁厚有助于增大螺距;内腔室高度B为12 mm时,螺距随着壁厚增长而缓慢增大,且最小值为125 mm;当内腔室高度B为8 mm时,螺距在壁厚A<2.8 mm时快速增大,壁厚A>2.8 mm时缓慢增长,此时螺距最小值为120 mm,最大值为265.95 mm,由此可见,壁厚对提高仿真螺距有显著作用。
图6b为壁厚位于中心水平(A=2.5 mm)时,内腔室高度B和腔室角C对仿真螺距影响的交互作用。由图6b可知,仿真螺距随着腔室角C增大而增大;当腔室角较小(C<45°)时,仿真螺距随着内腔室高度B增大而减小,腔室角较大(C>45°)时,仿真螺距随着内腔室高度B增大而急剧减小,这是因为当压力一定时,由于上下两层刚度差异,在腔室角较小时,导致弯曲分量在长度L方向上较大,当随着角度的增大,弯曲分量在长度L方向上越来越少,导致仿真螺距增大较快。
3.3 参数优化与对比试验
通过软体气动抓手螺旋直径与螺距的回归模型,运用Design-Expert 8.0软件中Optimization功能,以仿真直径35 mm、仿真螺距[50 mm,150 mm]为目标函数,其变量的取值范围为壁厚A[2 mm,3 mm]、内腔室高度B[8 mm,12 mm]、腔室角C[30°,60°],对各参数进行优化求解,得到各因素最优工作参数为A=2.51 mm,B=11.91 mm,C=30.52°。此时,仿真直径为35 mm,仿真螺距为100.05 mm。为验证模型准确性,以上述优化后的工作参数进行验证,试验重复3次,结果见表5。由表5知,仿真直径、仿真螺距的相对误差均小于5%,表明响应面仿真试验能够有效地实现优化。

表5 模型预测值与试验值比较
4 软体气动抓手抓取试验
4.1 不同气压下的抓取力
本研究的抓取对象是细长果蔬,在满足柔性抓取的基础上以水果黄瓜为抓取对象,测量软体气动抓手在不同气压下的抓取力,如图7a所示。通过法兰将软体气动抓手固定在机械臂(JAKA ZU3)末端,该抓手在气压为0.08~0.13 MPa,步长为0.01 MPa下分别对水果黄瓜进行抓取。在每个气压下,待软体气动抓手螺旋抓取水果黄瓜后,向水果黄瓜下方悬挂砝码,持续增加砝码质量,直至水果黄瓜与抓手之间产生滑移时,记录悬挂砝码的总质量,该试验在相同条件下进行5次,以悬挂砝码总质量m的最小值作为软体气动抓手在该气压下的最大摩擦力。通过试验测得黄瓜与硅胶之间的静摩擦因数μ为1.1,考虑黄瓜与在夹持过程中轴线与竖直方向存在微小的夹角γ为6.48°。根据黄瓜的轴向摩擦力平衡可知
μ(T+mgsinγ)=mgcosγ
(4)
式中T——夹持力
试验结果如表6所示。
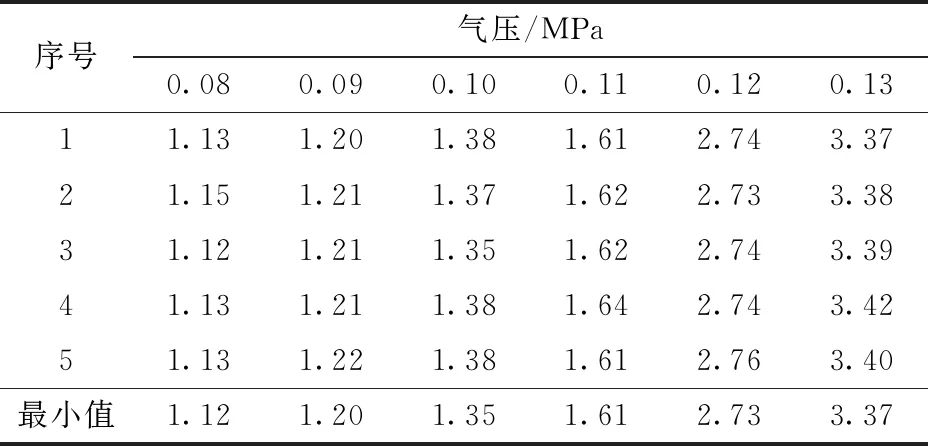
表6 软体气动抓手在不同气压下的抓取力
软体气动抓手在不同气压下的抓取力如图7b所示,软体气动抓手的抓取力随气压增大而增大。在软体气动抓手不发生破裂的情况下,该抓手在0.13 MPa下的最小抓取力为3.37 N,可以稳定抓取水果黄瓜、长茄等细长果蔬。
4.2 不同尺寸目标物的抓取
为了研究软体气动抓手抓取目标的适应性,固定在机械臂末端的软体气动抓手分别对水果黄瓜、尖椒和长茄(细长果蔬)进行抓取,如图8所示,在商场购买水果黄瓜、尖椒和长茄各30根,测量其质量与直径取平均值如表7所示。
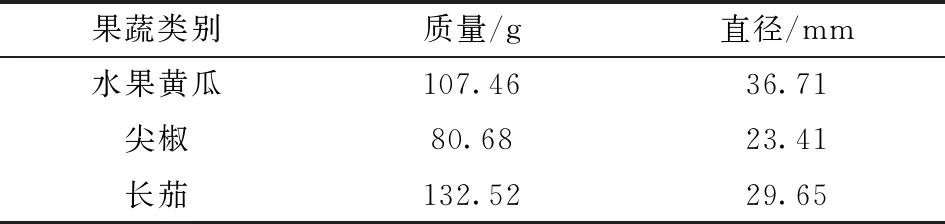
表7 不同目标物的质量
该抓手在气压0.08 MPa时,抓取直径35 mm的黄瓜质量为164 g,则抓取较小直径的尖椒、长茄需要更大的气压,因此设定试验压力为0.11 MPa并向抓手中充气,直至抓手能够稳定抓取不同尺寸、质量的果蔬,如水果黄瓜、尖椒和长茄。提升机械臂的过程中,抓手能够牢固抓取细长果蔬,且该类果蔬外表皮组织无损伤。试验结果表明,该抓手对细长果蔬无损抓取有效,同时证明了该抓手应用在细长果蔬无损采摘领域的潜力。
4.3 采摘试验
为了进一步验证软体气动抓手可以实现细长果实的采摘,在该抓手的末端安装断梗装置(气剪)并与JAKA机械臂末端相连,如图9所示。将细绳与黄瓜梗末端相连悬挂在支架上。首先,向抓手中充入0.08 MPa的气压使其螺旋变形抓取黄瓜,软体气动抓手能够稳定抓取黄瓜的时间为2.2 s;然后驱动气剪切断黄瓜梗,成功实现黄瓜的采摘,中间耗时为0.5 s;最后,打开放气阀将软体气动抓手中的气体排尽,该抓手恢复初始状态,黄瓜与抓手分离,中间耗时为0.9 s。因此软体气动抓手采摘黄瓜的总耗时为3.6 s。
5 结论
(1)设计了一种螺旋变形的软体气动抓手。以该抓手的螺旋直径和螺距作为关键性能参数,对壁厚、内腔室高度和腔室角进行了参数优化。
(2)应用ABAQUS有限元仿真软件对该抓手的变形特性进行仿真分析,采用3因素3水平中心组合设计的Box-Behnken试验,结果显示,各因素对螺旋直径和螺距影响的显著性顺序从大到小均为:壁厚、内腔室高度、腔室角,优化后的壁厚、内腔室高度和腔室角分别为2.51 mm、11.91 mm和30.52°,此时螺旋直径和螺距分别为35 mm和100.05 mm。
(3)对优化后的软体气动抓手在不同气压下的抓取力进行测量,结果表明,该抓手在气压0.13 MPa下至少具有3.37 N的抓取力。抓取试验表明,该抓手对水果黄瓜、尖椒和长茄等细长果蔬可进行无损抓取。动态采摘试验表明,在3.6 s内可完成水果黄瓜的无损采摘。