机器人辅助三叉神经半月节球囊压迫治疗三叉神经痛*
2021-06-29张晓磊王贵怀
董 生 张晓磊 李 伟 任 远 王贵怀 王 劲
(清华大学附属北京清华长庚医院神经外科,清华大学临床医学院,北京102218)
三叉神经痛 (trigeminal neuralgia, TN) 是一种常见的面部神经痛,三叉神经根显微血管减压术(microvascular decompression, MVD) 是治疗TN最重要的手术方法之一。MVD术后复发的TN治疗较为棘手。可能的选择包括伽马刀、三叉神经射频热凝术、半月节后根甘油阻滞术、三叉神经感觉根切断术等[1,2]。而经皮三叉神经半月节球囊压迫 (percutaneous balloon compression, PBC) 安全有效,操作时间短,病人耐受好,并且可以多次进行,成为治疗MVD术后复发TN重要的选择[3]。PBC在1978年最早由Mullan用于治疗三叉神经痛。Mullan和Lichtor于1983年首次进行了报道[4]。PBC 手术的关键点和难点在于准确穿刺卵圆孔,以适当的角度和深度进入 Meckel 腔,使球囊良好压迫三叉神经半月节。卵圆孔解剖位置、外形、孔径、走向存在比较明显的个体差异,给穿刺带来困难,或造成穿刺失败。卵圆孔毗邻解剖结构较复杂。穿刺过程中误伤,可能引起蛛网膜下腔出血、颈动脉海绵窦瘘等严重并发症[5,6]。PBC一般在C形臂或DSA引导下穿刺完成。通过这些方法显示和识别卵圆孔并不理想。目前有研究报道利用CT引导,应用神外导航辅助,或3D打印面模技术,手持穿刺针完成穿刺[7~10]。神经外科机器人是一种较新的技术,利用3D图像引导,通过刚性通道自动提供手术器械的运动路径,术者只需简单推动手术器械即可到达目标。神经外科机器人可以精准、稳定的实现医师的穿刺类操作[11]。亚毫米级的精度和自动定位能力具有其他技术难以比拟的优势,使这类操作达到了一个全新的水平。本研究旨在探索应用神经外科机器人穿刺卵圆孔进行PBC治疗三叉神经痛的可行性。为提高手术精确性,达到创伤最小化,提高手术安全性和有效性提供新的技术选择。此前,尚未见这种技术应用的报道。现报道如下:
1.一般资料
病例,女性,58岁,右额面部发作性疼痛3年。洗脸、刷牙、进食可诱发。早期服用卡马西平有效。于北京某医院诊断为三叉神经痛(右,I、III)。2年前行MVD术,术后原患处疼痛偶有发作,发作时的疼痛视觉模拟评分法 (visual analogue scale, VAS)评分从术前的9分降至2分。间断不规律口服卡马西平。9个月前疼痛明显加重,每日口服卡马西平1.2 g,疼痛缓解不明显,并出现头晕现象。2020-04-27于北京清华长庚医院行机器人辅助PBC。病人术日晨带改装的Leksell头架的头环行头颅CT检查。头环前方为短柱,后方为长柱。在头环2前柱和头环右侧边框外侧用透明贴固定专用钛合金定位粒。右侧口角近卵圆孔穿刺进针点处放置定位粒1枚,以上作为手术机器人注册标记点。局部麻醉后用4颗头钉将头环牢固固定于颅骨,并满足以下条件:①使头环下缘高于口角,以利术中穿刺卵圆孔过程中不阻碍手术机器人的机械臂及气管插管;②头环平面低于外耳道片面,保证术中头侧位X投照时卵圆孔不受头环遮挡(见图1)。行头颅连续CT扫描,层厚0.625 mm。数据供手术机器人定位用。麻醉采用气管插管全身麻醉,气管插管完成后,气管插管被缝线固定于门齿。而不采用常规的胶布固定。目的在于尽可能减少操作对面部的影响,防止面部标记点相对CT扫描时的位移。病人取仰卧位,头环与手术机器人(华科精准(北京)医疗科技有限公司生产的SR1神经外科手术导航定位系统)连接固定。C形臂置于机器人与手术床之间。调整C形臂至能够生成良好的头颅侧位片。手术机器人注册,以定位粒为参考点匹配病人实际位置信息和影像信息,注册精度良好。CT图像中卵圆孔较X平片中容易识别,界限清晰,周围结构容易辨识。在手术机器人系统上可进一步直观显示3D重建CT图像中的穿刺路径。联动的轴、矢、冠位头颅CT图像可以多角度观察卵圆孔。进行手术计划(见图2):以右侧卵圆孔内口内下部向颅内1 mm为靶点,设计进针路径。使入针点在右侧口角外侧,避开口腔,路径中无下颌骨阻挡。模拟穿刺,确定进针点,进行皮肤标记。以此标记为中心,常规消毒、铺巾,尖刀刺破进针点皮肤,手术机器人机械臂定位,穿刺针经机械臂把持器进行穿刺。把持器根据穿刺针数据3D打印定制而成,内径2.2 mm,穿刺顺利,头颅侧位片确定穿刺准确。植入球囊导管(深圳市擎源医疗器械有限公司生产的QKS-0050004型一次性脑科手术用球囊导管套件)。透视确定导管位置良好,球囊内注入碘佛醇溶液0.3 ml。透视确定球囊位置及形状良好,球囊内注入造影剂0.75 ml,保持压迫2.5分钟,撤除压迫1分钟后再同样压迫1次,后撤出导管,手术共用时71分钟。病人术后当日即疼痛症状消失,诉舌右侧麻木,右侧角膜反射减弱,右侧额、面部浅感觉减退。术后4个月随访,术后无疼痛症状复发,右眼有轻度干、痒感,无咀嚼无力、复视等。

图1 术中病人头部固定方式及与机器人机械臂位置关系
2. 讨论
机器人手术需要头架固定头部。同时,一般精度要求高的神外机器人手术需要把数枚定位钉牢固固定在颅骨作为标记点,供手术机器人注册用。本研究使用Leksell头架的头环固定病人头部,而没有使用Mayfield头架,是因为头环更轻巧,又可方便将定位标记点固定在头环表面。这样同时实现了固定头部和高精度辅助定位,避免病人头部固定定位钉的损伤和痛苦。
机器人手术可以在数秒内完成卵圆孔穿刺,不需反复调整穿刺针来达到预设的穿刺效果。穿刺损伤更小,用时更少,也无需反复多次用X线确定穿刺位置,病人受到的辐射剂量明显减少。机器人可以融合CT和MRI并3D呈现,CT可良好观察卵圆孔。在MRI图像中,可直接观察Meckel腔。对更加精细的穿刺卵圆孔提供了X线、CT影像无法获得的信息,有助于设计更加完美的穿刺路径。遗憾的是,报道中的病人术前没有行连续头颅MRI检查,故未使用影像融合技术。
神经外科机器人技术良好的稳定性和可控性使PBC手术趋向自动化,可以处理一些复杂的病例,无疑会明显缩短医师的学习曲线,并形成一种标准化的术式。但是机器人价格昂贵,需要专业人员操作,过程较为复杂,限制了这项技术的推广。
PBC是治疗MVD术后复发TN较好的选择。结合机器人辅助技术提高了这一术式的技术水平,可以使卵圆孔穿刺这一关键步骤个体化,更加精准,大幅缩短穿刺时间。从而保证手术安全性,提高有效性。尤其对于卵圆孔狭小、形状特殊、位置变异等有挑战的病例,这一新技术更具实际意义。
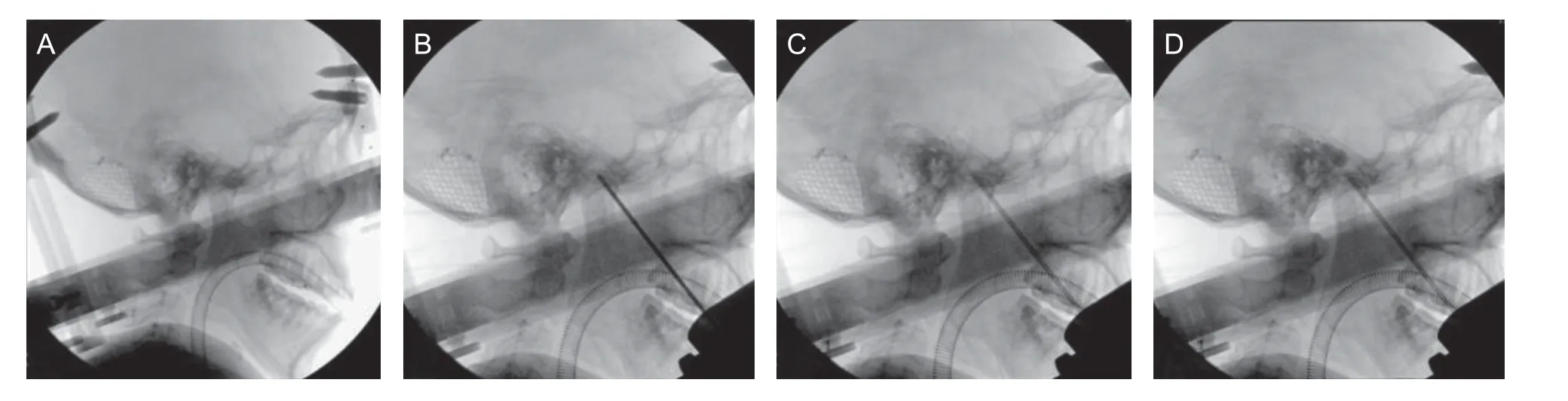
图2 术中C形臂投照完成的头部侧位像
