电控悬架用可变阻尼减振器动态特性研究
2021-06-27张博强赵浩翰冯天培
张博强,赵浩翰,冯天培,徐 浩
(1.河南工业大学机电工程学院,河南 郑州 450001;2.宣城协盈汽车零部件科技有限公司,安徽 宣城 242000)
1 引言
汽车悬架系统电控减振技术可有效改善汽车的操稳性,可变阻尼减振器因其优良的变阻尼特性和减振性能在汽车电控悬架上具有良好的应用前景[1]。
减振器的研究主要分为油液可控和阀口可控两大类[2],目前电磁阀式和磁流变液式可变阻尼减振器出于其优良的减振特性逐渐取代了双筒减振器,磁流变液减振器具有响应迅速能耗小等优良特点[3],但是由于其昂贵的成本多用于高级车系中,所以电磁阀式可变阻尼减振器结合汽车悬架形成常规半主动悬架的应用更为普及。文献[4]中设计了一种新型的电磁阀式减振器,并且通过建立复原和压缩行程中的数学模型和液压模型,对减振器的外特性进行了研究;文献[5-6]中以仿真和台架试验对比的方式对减振器的外特性进行了研究,验证了仿真模型的正确性。
在汽车的悬架系统中,电控悬架在自适应鲁棒控制、模糊控制等一系列不同的控制方式下悬架的减振性能会得到明显的改善[7]。2自由度1/4车辆悬架模型作为最简单的研究模型,国内外研究人员通常在1/4车辆悬架模型中将减振器用简易弹簧模型代替来对车辆悬架减振性能和优化控制进行研究。我们在以上研究的基础上对减振器进行精确化建模,进行汽车悬架减振性能的研究和仿真模型的验证。采用可变阻尼减振器、1/4车辆被动悬架、半主动悬架和C级路面的仿真模型相结合的方法,在对可变阻尼减振器实体模型精确建模的基础上研究悬架减振能力,验证了悬架仿真模型的正确性。
2 减振器的力学特性分析和控制原理
2.1 复原行程中力学模型的建立
根据复原行程下减振器内的油液流动路径,建立油液流动的流体力学[8]模型为:

式中:Q—在复原行程下,活塞上移时上腔产生的油液流量(L/min);
V—活塞移动的速度(m/s);A1—活塞腔的横截面积(m2);
A2—活塞杆的横截面积(m2),计算过程中忽略油液的可压缩性以及油液在流动过程中的沿程损失与局部损失。
活塞上腔的油液流量为流经复原阀流量与流经电磁阀流量之和,即:

式中:Qf—油液流经复原阀的流量(L/min);
QEf—油液流经电磁阀的流量(L/min)。
减振器阀口流通孔长度L与孔径d的关系为:
L/d≤0.5
该流通孔可以视为薄壁小孔,由流体力学可知,复原行程中流经复原阀与电磁阀的流量为:

式中:Cd—小孔流量系数,由试验得到取值范围为(0.61~0.62)(无量纲);As—复原阀阀口面积(m2);ρ—液压油密度;Pu—活塞上腔压力(MPa);Pd—活塞下腔压力(MPa)。
式中:Ae—电磁阀开度(m2);Pc—储油腔压力(MPa);Pz—中间腔压力(MPa)。
将式(3)和(4)代入式(2)有:

将式(5)代入式(1)得复原行程的工作缸压力差为:

因为F=PA,有背压时F=P1A1±P2A2,可得复原行程产生的阻尼力为:

式中:A2—活塞杆横截面积(m2)

压缩行程与复原行程中的计算原理相同,此处不再赘述。
2.2 减振器控制原理
阀控式可变阻尼减振器的控制由先导式溢流电磁阀作用,在不同电流的作用下电磁阀中可变节流孔的开度大小不同,油液流量产生的阻尼力大小也随之改变。在给定电磁阀一定的电流大小的条件下,研究不同速度下的阻尼力值大小得出减振器的工况。
3 可变阻尼减振器建模仿真与验证
3.1 可变阻尼减振器的结构参数
通过拆解某高端乘用车减振器实物可知,如图1所示。该减振器主要由三部分结构组成:活塞阀系、底阀系和电磁阀系。活塞阀系包括:流通阀片、复原阀片和阀座;底阀系包括:补偿阀片、压缩阀片和阀座;电磁阀(旁路阀)系包括:主阀、恒定节流孔、弹簧元件和先导腔等元件。

图1 可变阻尼减振器实体图Fig.1 Solid Diagram of Variable Damping Shock Absorber
3.2 可变阻尼减振器的仿真研究
实测后的减振器参数,如表1所示。

表1 仿真模型主要参数Tab.1 Main Parameters of The Simulation Model
利用多学科领域系统建模AMESim仿真软件进行建模[9],模型中分别模拟了减振器的三腔四阀结构,其中先导式电磁阀部分用PID信号源进行控制,建立的可变阻尼减振器仿真模型,如图2所示。

图2 AMESim减振器仿真模型Fig.2 AMESim Shock Absorber Simulation Model
图中:A—油液特性;B—激励输入;C—活塞腔;D—活塞阀系;E—底阀系;F—电磁阀系。
3.3 台架试验研究
参考国家汽车行业减振器台架试验标准QC/T545,在该标准下进行可变阻尼减振器特性试验研究[10]。采用正弦激励方式[11]:

式中:V—减振器内活塞运行速度(m/s);
n—正弦输入频率;
S—减振器行程(mm)。

表2 激励参数Tab.2 Excitation Parameters
试验硬件参数设置,如表3所示。

表3 试验硬件参数Tab.3 Test Hardware Parameters
测试试验如下:通过控制台施加激励并拾取响应,设置激振行程为40mm,固定正弦输入。给定电磁阀输入电流1.8A、电压12.3V、激振速度为0.05m/s-1.00m/s。台架试验台,如图3所示。

图3 台架示功试验台Fig.3 Indicator Power Test Bench
3.4 仿真与试验结果对比
通过仿真与试验在输入设定的参数的条件下,仿真与实验得出的示功特性曲线图,如图4所示。

通过台架试验和AMESim仿真研究,最后得出了可变阻尼减振器外特性的研究结果,试验结果与仿真结果的力值大小在误差范围内基本相符,最大误差为15.6%,示功图线形饱满而且没有空程畸变现象。由以上分析可以说明AMESim所建减振器模型的精确性,同时得出该模型可用于研究车辆1/4半主动悬架和被动悬架对于车辆的减振效果。
4 基于1/4车辆悬架模型的仿真研究
汽车被动悬架因不能根据路况来调节阻尼大小,使汽车的操纵稳定性较差,逐渐被半主动悬架和主动悬架取代[12]。而汽车主动悬架成本较高、结构复杂而且耗能大,多应用于高级轿车[13]。半主动悬架因结构简单,拥有与主动悬架相近的性能,应用广泛。
将对被动悬架和半主动悬架做对比研究,依据国产某车型的悬架系统建模分析,所需参数如表4所示。

表4 悬架系统主要参数Tab.4 Main Parameters of Suspension System
4.1 1/4汽车悬架的动力学仿真模型建立
根据车辆悬架的结构特点,将车身悬架部分划分为多种自由度,文中所研究的汽车悬架的振动方向均为z轴垂向,在被动悬架的研究中建立了2自由度1/4车辆悬架仿真模型,如图5所示。
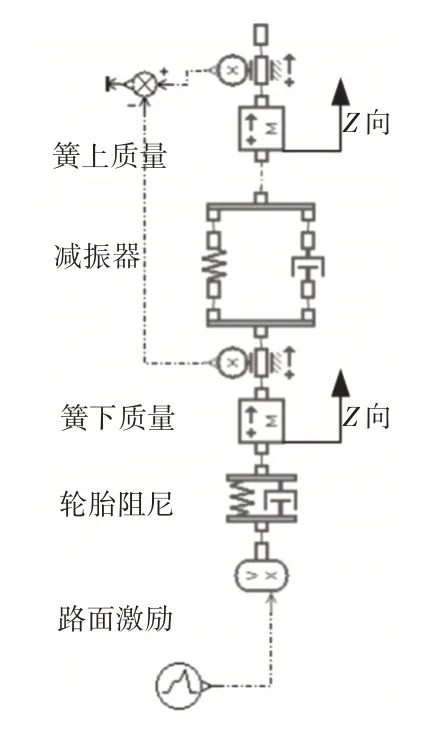
图5 1/4车辆被动悬架模型Fig.5 1/4 Vehicle Passive Suspension Model
在可变阻尼减振器系统的基础上建立了半主动空气悬架模型,模型中分别加入了空气弹簧、车身、轮胎和路面信号激励等子模型,建立的仿真模型,如图6所示。

图6 1/4车辆半主动悬架仿真模型Fig.6 Simulation Model of 1/4 Vehicle Semi-Active Suspension
4.2 悬架的控制策略
PID控制具有运算量小,实时性好等优点,所以在可变阻尼减振器空气悬架中采用PID控制。PID控制器由比例单元,积分单元和微分单元组成,其原理公式如下:

式中:e(t)—系统误差;Kp—比例系数;Ki—积分系数;Kd—微分系数;u(t)—控制器的输出力。
将PID控制器作用于悬架的减振系统中,然后在该控制器的控制下进一步研究两种不同悬架的减振器性能。
4.3 不同路面信号源激励下悬架性能对比
路面的好坏程度会影响悬架的性能。在下列研究中应用白噪声发生源,搭建了车辆速度20m/s的C级路面激励模型和路面激励信号[14],如图7所示。

图7 C级路面激励模型、信号示意图Fig.7 Schematic Diagram of Excitation Model and Signal of C-Grade Road Surface
将随机路面信号作为激励信号传输到被动悬架和半主动悬架中,通过对比时域内车身的速度、位移和加速度幅值,可以得出两种悬架的减振能力,仿真结果,如图8所示。

图8 车身垂向速度、位移、加速度时域响应对比曲线、及车身垂向加速度功率谱密度对比示意图Fig.8 Comparison Curve of Time-Domain Response of Vehicle Vertical Velocity,Displacement and Acceleration and the Body Vertical Acceleration Power Spectrum Density Comparison Diagram
通过对比车身加速度的功率谱密度可以说明在频域内不同悬架振动能量的差别,如图8(d)所示。
由图8可得:时域内输入C级路面激励得出的车身和簧下质量块的运动状态,半主动悬架车辆车身垂向的位移、速度和加速度的幅值均比被动悬架的低。在车身纵向加速度的功率谱密度对比中,被动悬架密度值0.63(W/Hz),半主动悬架密度值0.25(W/Hz)。
5 结论
利用可变阻尼减振器、1/4车辆被动悬架、半主动悬架和C级路面的仿真模型相结合的方法,对可变阻尼减振器进行了动态特性研究,仿真和试验结果表明:(1)通过分析可变阻尼减振器的实际构造、工作原理和内部的油液流动情况等机理,建立了可变阻尼减振器的仿真模型,与台架试验对比验证了可变阻尼减振器模型以及参数的正确性。(2)在C级路面激励下,半主动悬架车身振动的幅值低于被动悬架,半主动悬架的功率谱密度值较被动悬架低,有效得出了建立的仿真模型的准确性。(3)研究结果对可变阻尼减振器的应用以及悬架系统的设计开发提供了可靠的理论依据和研究方法,降低了调试和开发难度。
