基于论域可调模糊PID的云母矿质量分数控制系统设计与应用
2021-06-27付书培李星辉李书武
付书培,张 翼*,李星辉,李书武,李 俊,陈 蓉
1.武汉工程大学资源与安全工程学院,湖北 武汉430074;2.湖北平安电工材料有限公司,湖北 通城437400;3.武汉产品质量监督检验所,湖北 武汉430048
云母是一种电气绝缘性能优良的矿物[1],广泛应用于家电、电线电缆、航空航天、石油、化工、冶金和军事等领域。云母纸生产流程如图1所示[2],其主要包括云母原料预处理、制浆、鳞片分级、脱水、调浆和抄造等步骤。云母纸生产过程中常使用圆网造纸机,其结构见图2[3]。云母纸的抄造过程:云母原料经过高压水力制浆后成为高云母矿质量分数云母纸浆,在配浆箱中被稀释成云母矿质量分数为0.3%~0.5%的云母纸浆后进入造纸机,上浆圆网将纸浆均匀地涂覆于毛布表面,经压榨、烘干和卷纸等步骤后成纸。在抄造过程中,造纸机、压榨辊和烘缸依靠齿轮、皮带在同一速度下转动,该速度称为车速。在车速一定的情况下,调浆后的云母浆料质量分数稳定,生产出的云母纸定量稳定。当调浆后的云母浆料质量分数发生变化时,需要重新调节车速使云母纸定量合格。
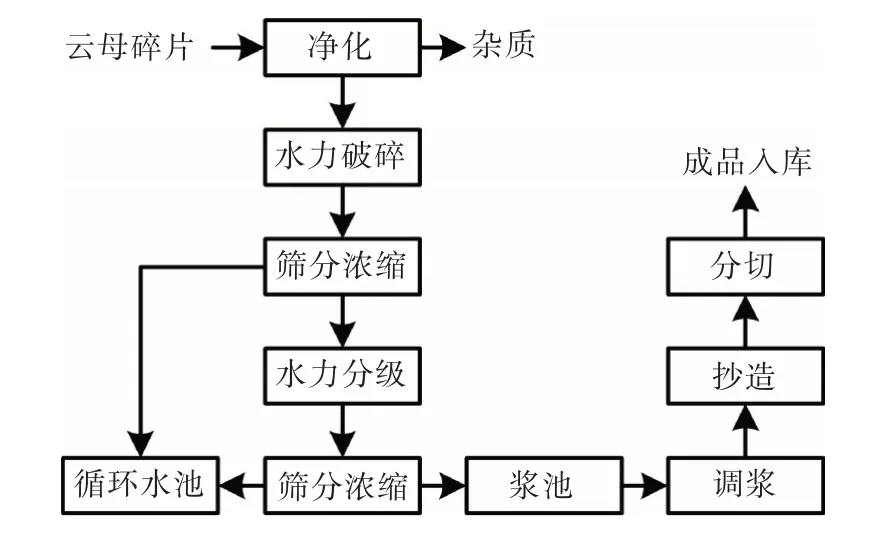
图1 云母纸生产流程Fig.1 Micapaper production process
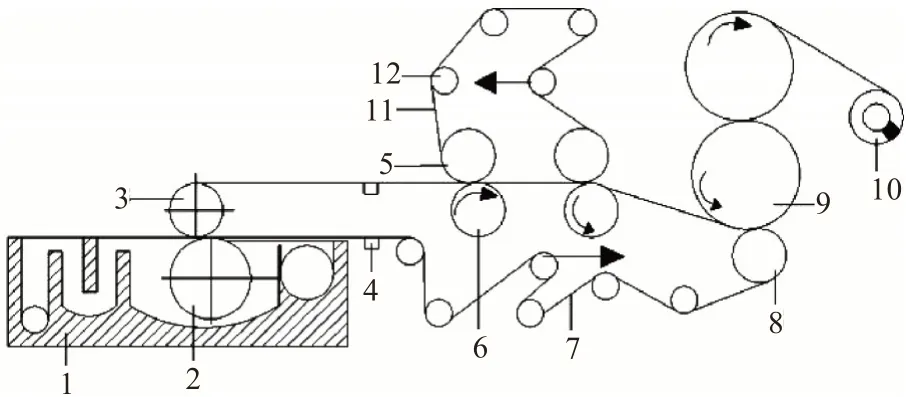
图2 圆网纸机示意图Fig.2 Schematic diagram of cylinder paper machine
由此可见,云母矿质量分数是水力制浆法生产云母纸过程中一个重要的工艺参数,云母矿质量分数的稳定性和精确性直接影响云母纸厚度[4-5]。通过对云母矿质量分数的自动检测与高精度控制,可以控制云母纸厚度稳定。在实际水力制浆过程中,云母矿质量分数受稀释水压、料浆流速、浆管布局和滤网透筛率等多种因素影响,从而导致云母矿的加工制浆过程具有大滞后、非线性和时变性等特点。目前,云母矿质量分数控制系统多采用普通比例积分微分(proportionalintegral-derivative,PID)控制器。该控制方式结构简单、便于实现,但在调节过程中,其比例(proportional,P)、积分(integral,I)、微 分(derivative,D)3个参数固定不变,很难达到理想的控制效果[6]。为此,国内外学者提出许多智能PID控制器[7-8],如单神经元PID控制器[9]、反向传播(back propagation,BP)神经网络PID控制器[6]、仿人智能PID控制器[10]、分数阶PID控制器[11]等。上述改进PID控制器在调节过程中,均能调整出合适的P、I、D参数,从而取得满意的控制效果。本文将经典模糊控制与普通PID控制融合,形成具备一定论域调节能力且能够自适应的模糊PID控制方法,并在实际生产中验证其效果。本文使用自主研发的云母矿质量分数检测仪作为云母矿质量分数信号采集装置,搭建控制系统,采用论域可调自适应模糊PID控制器,稳定且高精度地控制云母矿质量分数,从而保证云母纸质量。
1 云母矿质量分数控制工艺及系统数学模型
云母矿质量分数控制工艺如图3所示。来自制浆系统的云母矿浆在浆池内混合均匀,经上浆泵抽送至储存箱,再由储存箱自流至配浆箱,储存箱中超过溢流口的云母矿浆返回至浆池。安装在上浆泵后的矿浆检测仪将云母矿质量分数信号传送给智能控制器。智能控制器根据云母矿质量分数设定值与检测值之差进行逻辑运算,并问执行阀输出4~20 mA的电流信号。电动阀根据电流强度自动调节阀门开度,从而加入适量的稀释水控制云母矿质量分数。云母矿质量分数反馈调节控制系统如图4所示。
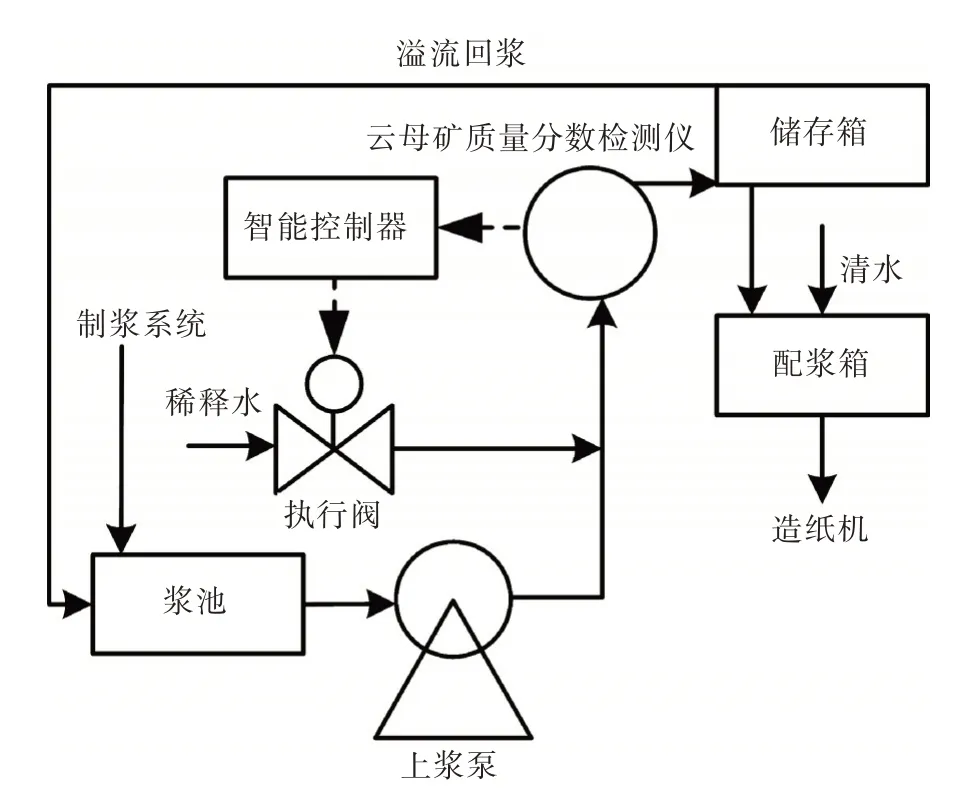
图3 控制系统示意图Fig.3 Diagram of control system
在云母矿质量分数控制过程中,电动阀、云母矿质量分数传感器及云母矿质量分数的传递函数可以由一阶惯性环节近似拟合[12]。云母矿质量分数控制系统的数学模型如式(1)所示:
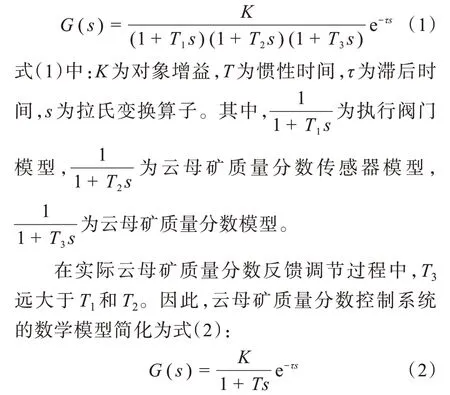
式(2)中:T=T3,K、τ和T可通过现场试验确定。

图4 控制系统结构图Fig.4 Diagram of control system structure
2 自适应模糊PID云母矿质量分数控制器
2.1 PID控制器的设计
模糊PID控制器主要分为阈值切换型模糊PID控制器与自适应型模糊PID控制器。自适应模糊PID控制器的原理[13]是在常规PID控制器的基础上,以误差e和误差变化率ec作为模糊控制器的输入,以PID参数Kp、Ki、Kd作为输出。控制对象的清晰量(e,ec)转换成模糊量(E,EC)后提供给推理决策单元使用;决策控制器根据合成规则或R关系,经模糊推理得出模糊控制器模糊输出量;该模糊输出量由精确化接口得到精确输出量。从而适当地调整PID控制器的3个参数。常规的模糊控制器如图5所示。为了提高系统的稳定性,一般将PID参数分为常规PID参数和模糊推理参数2个部分,PID控制器的实时参数见式(3):
式(3)中:Kp、Ki、Kd为PID控制器的输出参数;Kp1、Ki1、Kd1为PID的初始参数;ΔKp、ΔKi、ΔKd为模糊推理参数。

图5 常规的模糊控制器Fig.5 Conventional fuzzy controller
对于上述输入变量e、ec和输出变量ΔKp、ΔKi、ΔKd分别取7个模糊子集为NB,NM,NS,ZO,PS,PM,PB,分别代表负大,负中,负小,零,正小,正中,正大。根据PID的3个参数对系统性能的影响,结合现场调试人员的经验,针对模糊控制器输入不同的变量e、ec,建立输出变量ΔKp、ΔKi、ΔKd模糊控制规则表,如表1所示[14]。
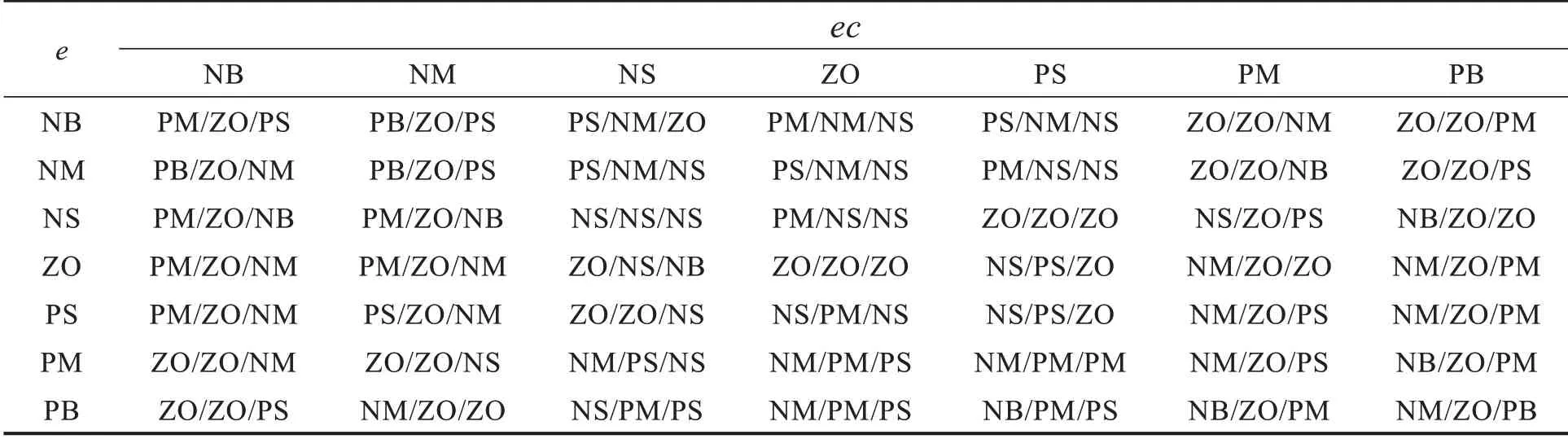
表1 PID模糊控制规则表[14]Tab.1 Ruletable of PID fuzzy control
2.2 论域可调自适应模糊PID控制器的设计
论域可调是指在论域上保持模糊划分不变的前提下,模糊控制器输入变量与输出变量的论域范围随被控对象误差及其误差变化率伸缩调整。由于输入变量与输出变量的论域范围整体收缩导致模糊控制规则局部变细,相当于扩充了模糊控制规则表的规则数,从而达到改善系统控制性能、提高调节精度的目的[15]。
若模糊控制器输入变量ri的模糊论域为Ri=[-R,R],其输出变量uj的模糊论域为Uj=[-U,U]。则论域可调是指模糊论域Ri与Uj能够随变量ri与uj的变化而变化,即

式中:αi(ri)、βj(uj)分别为模糊控制器输入与输出论域的伸缩因子;下标i、j分别为模糊控制器输入与输出变量的数量。相对于模糊论域范围可调的Ri(ri)与Uj(uj),最初的模糊论域Ri与Uj则称为初始论域。
该论域可调自适应模糊PID控制器中,模糊控制输入输出变量的论域伸缩因子函数见式(6)~式(8)[15-16]。
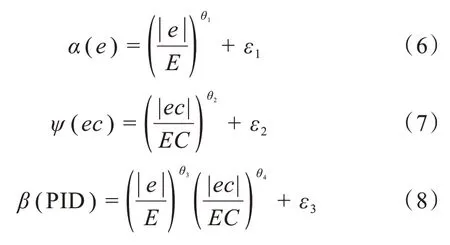
式中:α(e)、ψ(ec)、β(PID)分别为输入云母矿质量分数值误差e、误差变化率ec和输出ΔKp、ΔKi、ΔKd增量参数的论域伸缩因子;E、EC分别为e、ec初始论域边界值;ε1、ε2、ε3为充分小的正数,θ1、θ2、θ3、θ4为0~1的常数。
图6为论域可调自适应模糊PID控制器的结构图,系统主要由PID控制器与论域可调模糊控制器组成。

图6 自适应模糊PID控制系统结构图Fig.6 Structure diagram of adaptive fuzzy PID control system
其运行时,具体执行步骤为[14,17]:
1)智能控制器根据云母矿质量分数检测仪检测的云母矿质量分数,计算出当前云母矿质量分数的误差e和误差变化率ec,并送入论域伸缩因子调整单元,计算出输入、输出变量的论域伸缩因子。
2)模糊控制器根据当前云母矿质量分数的e、ec及当前论域[-α(e)E,α(e)E]、[-ψ(ec)EC,ψ(ec)EC]、[-β(PID)K(P,I,D),β(PID)K(P,I,D)]进行模糊推理获得模糊推理参数ΔKp、ΔKi、ΔKd,将其分别与PID的初始参数Kp1、Ki1、Kd1进行加和运算,得到PID控制器的输出参数Kp、Ki、Kd。
3)PID控制器根据当前云母矿质量分数的误差e及PID控制器的输出参数Kp、Ki、Kd输出控制信号至执行阀,通过改变阀门开度加入适量的稀释水实现云母矿质量分数的精确、稳定调控。论域可调模糊控制器参数如表2所示[14,18]。
3 云母矿质量分数控制系统仿真与分析
在MATLAB环境下,对控制系统进行Simulink仿真分析。根据现场试验可知,系统增益K=3、纯滞后τ=3 s、惯性时间T=2 s,则τ/T=1.5(>1),此过程为大时滞过程,可得云母矿质量分数模型[19]:

在Simulink仿真器中建立普通PID、论域可调自适应模糊PID云母矿质量分数控制系统仿真模型。根据现场调试经验普通PID参数设置为:Kp=1.2,Ki=2.5,Kd=0.01。论域可调自适应模糊PID的初始参数与普通PID参数相同,论域可调模糊控制器参数如表2所示。
该系统控制器部分(图7)主要由论域可调装置(图8)和论域可调模糊自适应(图9)两大子系统组成。普通PID控制器与论域可调自适应模糊PID控制器的仿真结果如图10所示。
由图10可以看出,与普通PID相比,论域可调自适应模糊PID动态性能更好,响应速度快、调节时间短,超调量较小。系统性能改善明显。因此所设计的论域可调自适应模糊PID控制器较好地改善了其控制性能。

表2 论域可调模糊控制器参数Tab.2 Parameters of fuzzy controller in variable universe
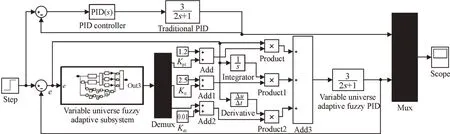
图7 自适应模糊PID控制仿真模型Fig.7 Simulation model of adaptive fuzzy PID control
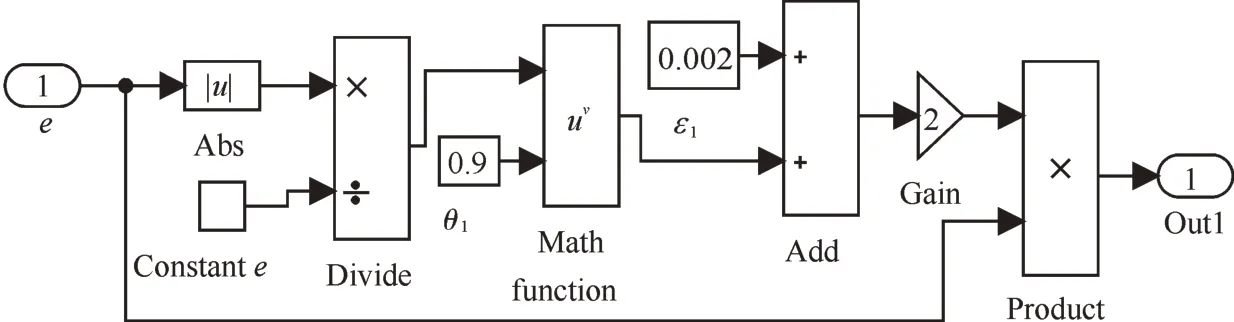
图8 论域可调控制仿真模型Fig.8 Simulation model of variable universe control
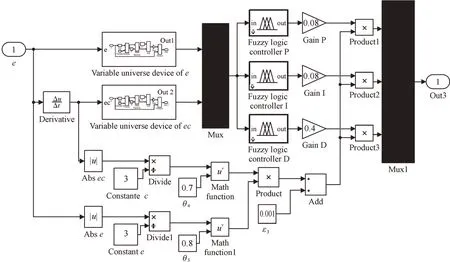
图9 模糊自适应子系统仿真模型Fig.9 Simulation model of fuzzy adaptive subsystem

图10 控制器仿真结果Fig.10 Simulation results of controllers
4 论域可调自适应模糊PID云母矿质量分数控制系统的实现与应用
4.1 论域可调自适应模糊PID云母矿质量分数控制系统的实现
在云母矿质量分数控制工艺(图3)中,智能控制器主要由人机交互程序与变送器组成。控制系统根据云母矿质量分数检测仪传送的云母矿质量分数进行逻辑运算,得出对应阀门开度信号后,将最新的阀门开度信号(数字信号)传送给变送器。变送器将接收到的最新阀门开度信号转换为相应的4~20 mA电流信号,并传送到执行阀门。执行阀门通过调节阀门开度,控制加入稀释水的量,从而保持云母矿质量分数稳定在设定值。
4.2 实际运行效果
该套云母矿质量分数控制系统运行之后,云母矿质量分数波动曲线如图11所示。

图11 云母矿质量分数波动曲线Fig.11 Volatility curve of mica ore mass fraction
连续运行结果表明:该控制系统能够将云母矿质量分数静态误差由原工艺每班±1.5%控制在±0.2%内,并且自动跟踪设定值,控制效果良好。
开启该控制系统,保持造纸机车速7.5 m/min的情况下,观测生产云母纸的定量波动情况。某班次定车速生产数据如图12所示。
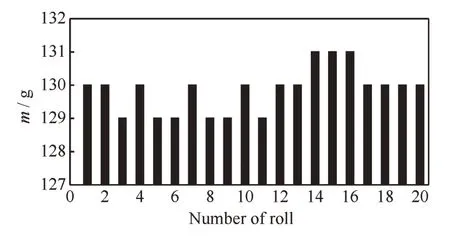
图12 云母纸生产数据Fig.12 Production data of mica paper
从图12中可以看出,当车速为7.5 m/min生产130 g定量云母纸时,在一个班次内云母纸定量129~131 g,定量误差完全满足其生产要求(±3 g)。
综上所述,该检测控制系统运行后可以稳定云母矿质量分数,降低了云母纸的定量波动范围,可达到正常生产时不调车速或微调车速的效果。
5 结 论
针对云母矿质量分数控制系统大滞后、非线性和时变性的特点,本研究有机融合论域可调理念、经典模糊控制及普通PID控制的优点,设计模糊控制器输入变量与输出变量的论域伸缩因子,提出论域可调自适应模糊PID云母矿质量分数控制系统。在Simulink仿真实验中,与普通PID控制相比,论域可调自适应模糊PID具有更快的动态系统响应速度、调节速度,更小的超调量。该控制系统在实际运行中,能够稳定云母矿质量分数(±0.2%),降低云母纸的定量波动范围,达到正常生产时不调车速或者微调车速的效果。此外,矿石质量分数是复杂选矿过程中的一个重要参数,检测与控制矿石质量分数是一个重要的环节[20]。该控制系统可以适用大部分磨矿过程的矿石质量分数自动控制。
