充液柔性航天器刚-液-柔耦合动力学研究的凯恩方法
2021-06-25孙梓煜岳宝增柳征勇申云峰
孙梓煜,岳宝增,刘 峰,柳征勇,申云峰
(1.北京理工大学宇航学院,北京 100081; 2.上海宇航系统工程研究所,上海 201109;3.郑州工业应用技术学院信息工程学院,郑州 451199)
0 引 言
现代航天器在携带大量液体推进剂的同时也安装有太阳能帆板等大型柔性附件,并且还要在微重环境下执行复杂的在轨任务,例如大角度姿态机动、变轨机动和交会对接等。在此背景下,燃料贮箱内推进剂发生大幅度晃动或大范围运动并与航天器刚体运动以及柔性太阳能帆板振动之间的耦合动力学备受关注[1-4]。当柔性附件振动的固有频率与液体推进剂的晃动频率相接近所产生的共振效应会对航天器带来不可忽视的影响[3-7]。因此,需要对航天器刚-液-柔耦合动力学问题进行深入研究。
与传统的拉格朗日方法和欧拉方法相比较,采用凯恩方法进行动力学建模具有适用范围广、单项计算简单、程序化明显的优点。本文采用运动脉动球模型(Moving Pulsating Ball Model,MPBM)首次由Vreeburg[7-9]提出,邓明乐[10-11]等对该模型进行了进一步的研究和改进)模拟微重力液体燃料大幅晃动动力学;在运动脉动球模型中任意形状的贮箱被等效成球形贮箱,假设全部液体参与晃动并保持其均匀球体几何构形即脉动球。脉动球与球形贮箱始终保持点接触,脉动球在贮箱内运动的同时其半径在发生变化,由此来模拟液体在贮箱内运动过程中的各种复杂现象。
对于航天器在进行大范围运动时柔性附件振动动力学,传统方法大多基于Euler-Bernoulli梁理论或者Kirchhoff-Love板理论[12-13]进行动力学建模,并没有将动力刚化效应引入到系统方程中[3]。本文根据几何非线性假设并考虑了太阳能帆板振动过程中的动力刚化效应,并基于凯恩方法建立了航天器刚-液-柔耦合系统动力学模型。最后通过数值仿真,验证了理论的正确性和模型的合理性。
1 物理模型
图1所示为携带太阳能帆板的充液航天器模型示意图,主体部分为罐形刚体,三个动量轮安装在三个惯性轴上,航天器内装有任意形状的液体推进剂贮箱,两个矩形太阳能帆板与航天器主体刚性相连,图中L表示太阳能帆板的长度,D表示帆板的宽度,A表示1号太阳能帆板上的角点。坐标系Nn1n2n3为牛顿惯性参考系,航天器的质心为G*,航天器的平动运动表示为G*在惯性系中的运动;坐标系Gg1g2g3为航天器本体坐标系,航天器的转动运动表示为本体系在惯性系下的转动;贮箱内的液体推进剂的晃动运动等效为运动脉动球模型,其中任意形状贮箱等效为球形贮箱,箱内全部液体等效为一个半径可变质量不变的均匀球体,即脉动球,脉动球始终与球形贮箱腔壁点接触,长度可以变化的半径意味着脉动球的体积可以变化,这个特点可以模拟液体在贮箱内的各种复杂现象;贮箱与航天器刚体部分刚性连接,箱内坐标系与航天器本体坐标系平行,PG*Ct表示贮箱在航天器内的位置;Plpl1pl2pl3为第l(l=1,2)个太阳能帆板的局部坐标系,其坐标原点在太阳能帆板与航天器主体连接部分的中点;当太阳能帆板发生振动时,Q′l表示帆板上任意位置的微元。

图1 航天器物理模型Fig.1 Physical model of spacecraft
2 凯恩方法建立动力学模型
2.1 航天器运动学描述
1)航天器的在轨平动和转动
选取航天器平动的速率为一组广义速率ui=NvG*·gi,(i=1,2,3);转动的速率为一组广义速率u3+i=NωG·gi,(i=1,2,3);因此航天器的速度和角速度表示为:
NvG*=u1g1+u2g2+u3g3
(1)
NωG=u4g1+u5g2+u6g3
(2)
2)三个轴向安装动量轮
选取动量轮的转动速率为一组广义速率u6+i=NωWi·gi,(i=1,2,3),动量轮的角速度表示为:
NωW1=(u4+u7)g1+u5g2+u6g3
(3)
NωW2=u4g1+(u5+u8)g2+u6g3
(4)
NωW3=u4g1+u5g2+(u6+u9)g3
(5)
3)贮箱内液体的运动描述
如图1所示,脉动球的中心在惯性参考系下的位置矢量为:
PS=PG*+PG*Ct+PCtS
(6)
式中:Ct为球形贮箱的中心,令PG*Ct=XTg1+YTg2+ZTg3,即贮箱在航天器内的安装位置;图2中贮箱内坐标系Oxyz与航天器本体坐标系平行,PCtS表示脉动球中心在贮箱内的位置,PCtS=xg1+yg2+zg3。液体在贮箱中运动所对应的广义速率为:
图2 运动脉动球模型Fig.2 Moving pulsating ball model
u12+i=GωS·gi=OωS·gi(i=1,2,3)
脉动球在动坐标系下的速度可表示为:
NvS=[u1+(ZT+z)u5-(YT+y)u6+u10)]g1+
[u2-(ZT+z)u4+(XT+x)u6+u11)]g2+
[u3+(YT+y)u4-(XT+x)u5+u12)]g3
(7)
角速度可表示为:
NωS=(u4+u13)g1+(u5+u14)g2+(u6+u15)g3
(8)
另外,脉动球质心运动轨迹满足约束:S(x,y,z)=x2+y2+z2-(RT-r)2=0,以此来达到脉动球始终和贮箱腔壁点接触的约束条件,其中RT为贮箱半径长度,r为脉动球半径长度;由于脉动球自身半径可变的脉动效应,因此其转动惯量IS也会随着时间改变,因此存在:
(9)
式中:S为脉动球中心到贮箱中心的距离。
4)柔性附件太阳能帆板的大范围运动
当航天器执行大范围机动等航天任务时,连接在航天器主体上的柔性附件通常会发生振动。传统的小变形理论具有一定的局限性,应当将太阳能帆板振动时产生的横向位移对轴向位移的影响考虑到动力学公式中,即柔性附件的动力刚化效应。
太阳能帆板上的微元Q′l,(l=1,2)在惯性参考系下的位置矢量表示为:
PQ′l=PG*+PG*Pl+PPlQl+dl
(10)
令PG*Pl=Alg1+Blg2+Clg3,(l=1,2),表示第l个太阳能帆板在航天器上的安装位置;令PPlQl=ξlpl1+ζpl2=(-1)l-1ξlg1+(-1)l-1ζlg2表示第l个帆板上任意位置的微元Ql在未发生振动时所在的位置。公式(10)中的dl表示帆板上的微元因振动产生的变形位移:
dl=-(-1)l-1dl1g1-(-1)l-1dl2g2+dl3g3
(11)
式中:dl1和dl2为沿着g1和g2轴的非负缩短值,是由于耦合效应而产生的收缩位移[3]。
由于太阳能帆板振动时的产生的动力刚化效应,dl1和dl2可以表示为:
(12)
式中:H1(ξl,ζl)和H2(ξl,ζl)为半正定系数矩阵,由此可见柔性附件的刚化效应为二阶的。采用假设离散模态法来近似太阳能帆板振动时产生的横向位移,dl3可表示为:
(13)
式中:Φm是自由梁的第m阶固有振型函数;Ψn是悬臂梁的第n阶固有振型函数;qlmn是与二维模态对应的模态坐标。本文截取前三个模态,即p=3和q=1,定义如下广义坐标矢量:
太阳能帆板由于振动产生的广义速率选取为:
因此在惯性参考系下,太阳能帆板上任意微元的速度可以表示为:
(14)
2.2 偏速度和偏角速度
本文中涉及的航天器共有21个自由度,第r个偏速度或者偏角速度表示所对应的速度或角速度表达式中第r个系数,航天器各部分所对应的偏速度和偏角速度可表示为:
航天器主刚体:
动量轮:
脉动球:
太阳能帆板:
2.3 广义惯性力
1)偏加速度和偏角加速度
在惯性参考系下,航天器主刚体、脉动球和太阳能帆板所对应的偏加速度为:
(15)
u2u6+(YT+y)u4u5+(ZT+z)u4u6-(XT+
(16)

(17)
在惯性参考系下,航天器主刚体、动量轮和脉动球的偏角加速度为:
(18)
(19)
(20)
(21)
(22)
2)广义惯性力
本文所涉及的航天器对应的广义惯性力公式为:
(23)

2.4 广义主动力
由于重力作用、动量轮提供的控制力矩、液体晃动产生的广义作用力和广义作用力矩、以及太阳能帆板材料的弹性作用产生的广义作用力,广义主动力的表达式为:
(24)

1)脉动球产生的广义作用力和作用力矩
如图2所示,在脉动球与贮箱腔壁的接触点处,脉动球产生的广义作用力即为脉动球晃动时产生的晃动力FL,由法向力和摩擦力组成[10],因此:
(25)
其中:e为PCtS的单位向量。
e=(x2+y2+z2)-0.5(xg1+yg2+zg3),摩擦力的近似表达式由实验可得到,即:
其中:Vu表示流体的转动速度与圆柱体半径的乘积。
由于脉动球在贮箱内运动存在能量交换,理想情况下,法向力与重力所做的功全部转化为脉动球的角动能、表面张力势能以及自身呼吸运动所产生的动能,因此可以得到法向力的表达式:
r(NωG+GωS)2-5πσr+Gs·e
(26)
当脉动球运动到最小半径时,脉动球将会被“冻结”,此时法向力的表达式为:
(27)

脉动球模型中,脉动球产生的广义作用力矩即为脉动球晃动时产生的晃动力矩,晃动力矩的表达式由有关的流体动力学实验规律而获得的经验公式:
TL=fac[tsrωr+(1-tsr)(GωS-ωr)]
(28)
其中:ωr表示GωS沿着e的分量,tsr为常数,根据需要考虑的绕轴转动和滚动转动的权重来取值,0 (29) 其中:rmin表示脉动球半径变化时的最小值。 因此,脉动球产生的广义作用力矩的表达式为: (30) 其中:rL为液体产生晃动力作用点的位置向量。 2)太阳能帆板的弹性作用力 由于材料的弹性作用,太阳能帆板所受的作用力表达式为: (31) 其中:Klij是第l个太阳能帆板模态刚度矩阵Kl中的元素,Kl是通过计算由于横向振动而储存在板中的应变能来定义的。 (32) 对于本文所涉及到的航天器,凯恩公式的表达式为: (33) (34) 此外,采用欧拉四元数描述航天器主体相对于惯性参考系的姿态,其运动学发展方程为: (35) (36) 联立式(34)和式(35),得到该航天器耦合系统动力学方程组: (37) 已有的研究中,如文献[10]和[11]已经验证了脉动球模型的可靠性。通过计算仿真,将本文提出的对柔性太阳能帆板的等效方法与传统的Kirchhoff-Love板假设对比,验证了将动力刚化效应纳入到公式中的合理性;对本文提出的模型进行姿态动力学仿真模拟,验证了模型的合理性与可靠性。 现代航天器在执行航天任务时,其携带的大型柔性帆板所产生的动力刚化效应会对航天器产生影响。航天器在执行大角度转动时,柔性附件产生使帆板紧缩的影响称为动力学刚度效应,本文中第l个太阳能帆板的广义刚度矩阵为: (38) (39) 对于传统的Kirchhoff-Love板假设,公式(39)的形式为: (40) 当航天器旋转的角速度过于大时,Kirchhoff-Love板假设将会失效,使仿真计算失败。 仿真计算中,太阳能帆板的安装位置为: 本算例对航天器施加一组角加速度激励来验证基于几何非线性假设的准确性。在t=0时刻,航天器处于稳定状态,太阳能帆板未发生变形。然后给定如下表达式的航天器角速度变化规律,使航天器做加速自旋机动: 计算采用的具体参数见表1。 表1 太阳能电池板的计算参数Table 1 Simulation parameters of the solar panels 工况1:T0=30 s,ω1=0.2 rad/s,ω2=0.2 rad/s 工况2:T0=30 s,ω1=2 rad/s,ω2=2 rad/s 图3所示为1号太阳能帆板上角点A的挠度相应,其对应1号太阳能帆板上的坐标为[0.5D,L, 0]T。本文将传统方法(基于Kirchhoff-Love板假设)与前文所提到方法的计算结果进行对比,结果显示在航天器自旋角速度较小时结果几乎相同。 图3 工况1: 1号太阳能帆板上角点A挠度Fig.3 No.1 deflection of corner A on solar panel 1 如图4所示,在航天器自旋角速度较大时,传统方法得到的计算结果产生了发散的结果,而文中提到方法得到的计算结果依然合理,这是因为动力学公式中考虑了动力刚化效应。 图4 工况2: 1号太阳能帆板上角点A挠度Fig.4 No.2 deflection of corner A on solar panel 1 通过对比工况A与工况B两种仿真算例可知,当航天器的自旋角速度较小时,本文所使用的方法与传统的基于Kirchhoff-Love板理论计算结果几乎一致;但当航天器的自旋角速度较大时,传统方法由于公式中未考虑动力刚化项造成计算结果发散,不能正确的反应出实际情况,而本文模型得到的计算结果符合实际情况,这说明将动力刚化效应纳入到动力学公式中可以有效的计算出航天器自旋角速度较大时的帆板振动位移。 (41) 式中:kp=250;kd=2000。 贮箱的安装位置为偏心安装,其位置为 PG*Ct=[0.1805, 0, 0.4085]T 图5所示为重力加速度为零时航天器的姿态机动过程,图6中计算时的重力加速度为0.05 m·s-2,图6(a)为同时考虑柔性太阳能帆板的动力刚化效应以及液体推进剂的晃动影响下的航天器角速度变化历程;图6(b)所示为将太阳能帆板视为刚化板,即无帆板的柔性振动效应;图6(c)所示为将液体固化,即不考虑液体的晃动影响。 图5 零重力环境下航天器角速度Fig.5 Angular velocity of spacecraft in zero-gravity 图6 低重力环境下航天器角速度Fig.6 Angular velocity of spacecraft in low-gravity 通过仿真算例表明,对比图5和图6(a),在微重力环境下,液体晃动对航天器的姿态机动产生明显的干扰,随着重力效应的增加,干扰愈发明显;在图6中,对比图(a)和图(b),柔性帆板的振动对航天器角速度影响主要体现在u4方向上;对比图(a)和图(c)由于液体在贮箱内的大范围运动,造成了航天器在进行姿态机动时,其角速度的三个方向上都因受到了液体晃动的影响而产生了一定的扰动,并且图(c)中在120 s左右航天器达到稳定状态。综合对比仿真计算结果,贮箱内液体晃动和柔性帆板振动与航天器主刚体之间的耦合效应对航天器的姿态机动产生较明显的干扰。 本文基于运动脉动球模型模拟航天器中液体推进剂的晃动动力学,根据几何非线性假设引入柔性附件振动过程中的动力刚化效应,借助凯恩方法建立了航天器刚-液-柔耦合系统动力学模型。通过与传统的基于Kirchhoff-Love板假设所建立的模型对比,验证了将动力刚化效应纳入到柔性太阳能帆板振动动力学分析过程中的合理性;通过对航天器姿态机动动力学进行数值仿真与结果分析,验证了带柔性帆板的充液航天器在进行大角度姿态机动时,其携带的液体推进剂和柔性帆板与航天器主刚体之间的耦合动力学效应对航天器的姿态机动具有不可忽视的影响。本文的研究结果将对我国新一代航天器的总体设计提供必要的理论参考。2.5 动力学公式



3 数值仿真
3.1 动力学刚化效应仿真模拟


3.2 带柔性附件充液航天器姿态动力学研究

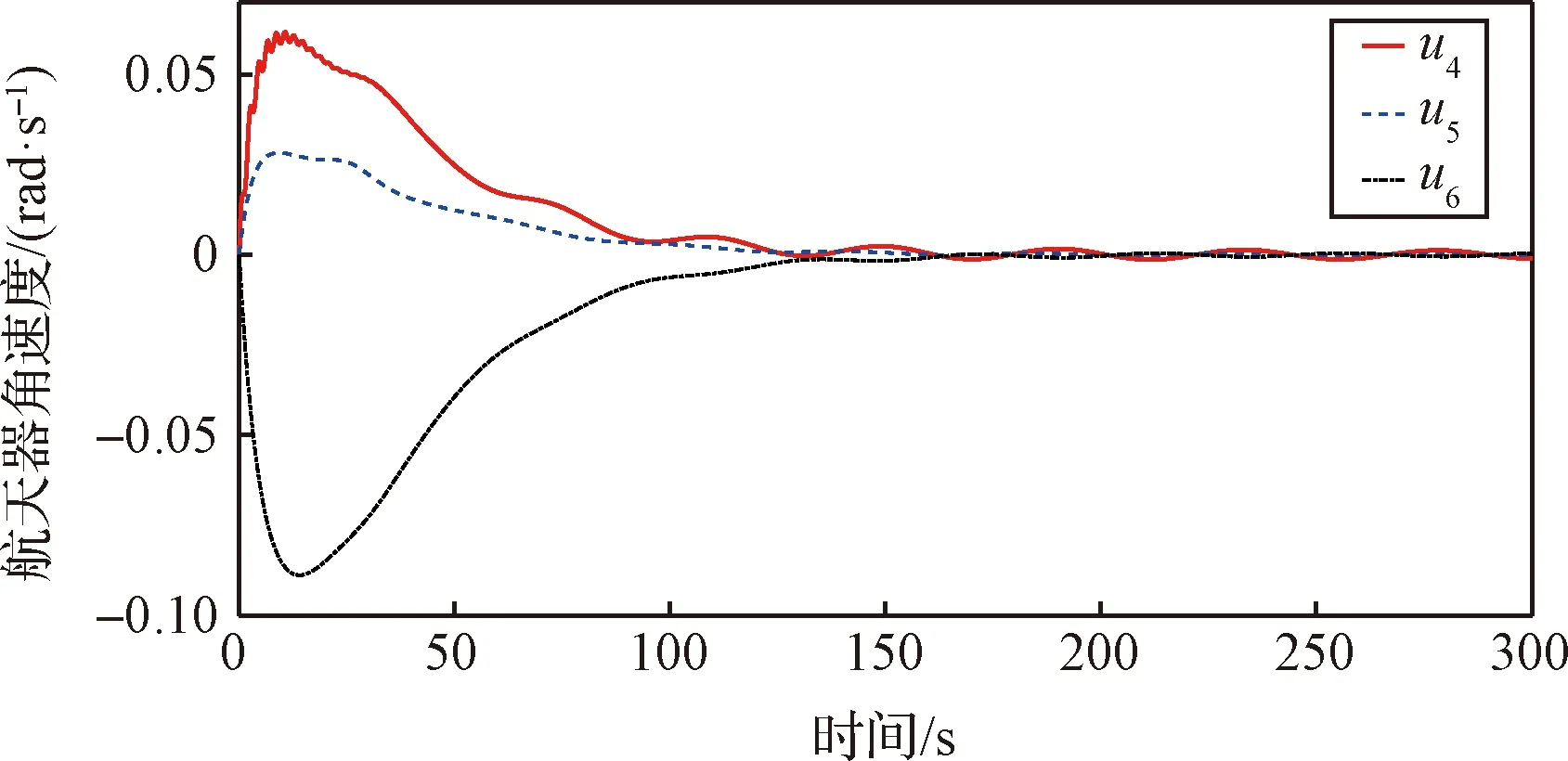
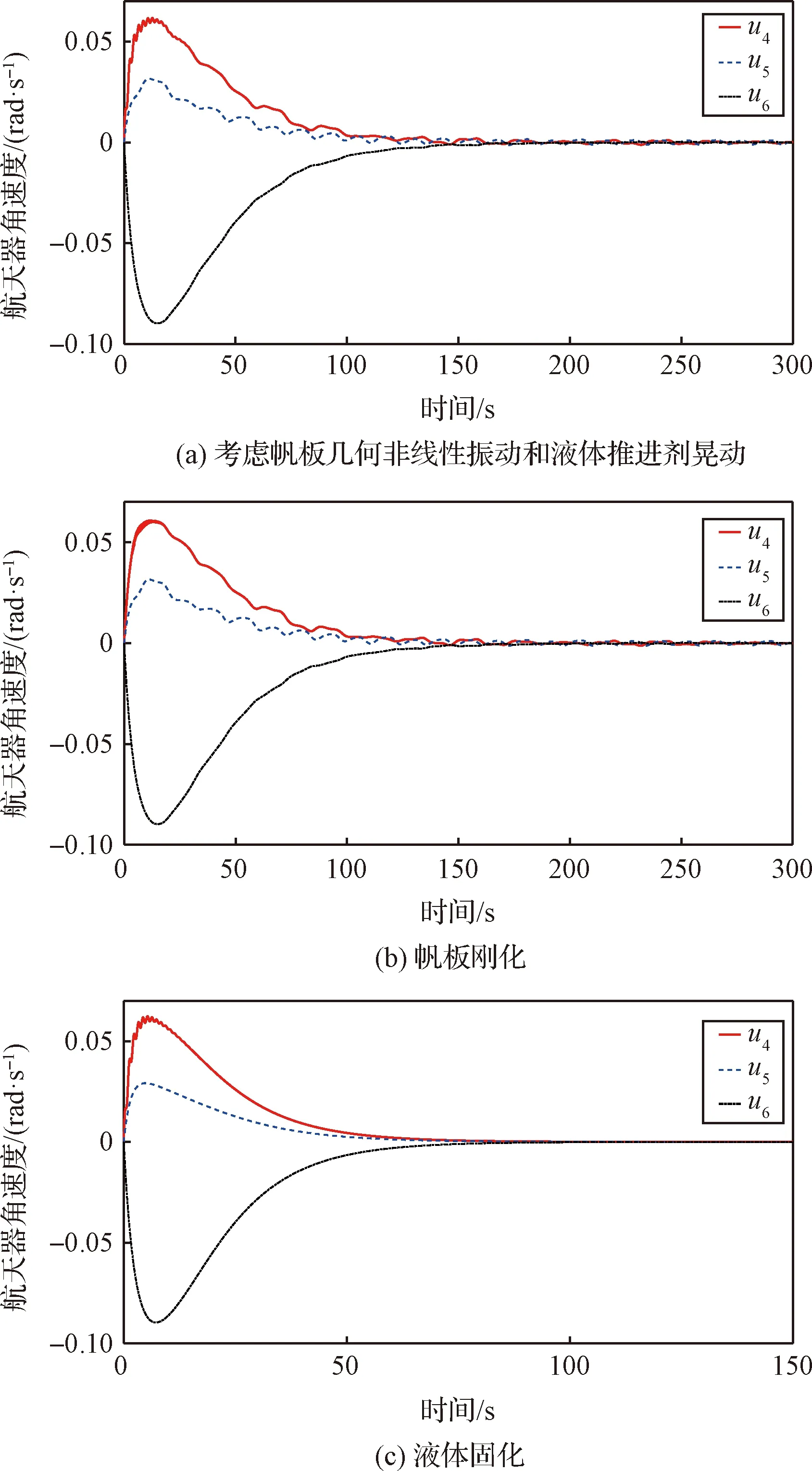
4 结 论