基于离子风电推进系统的平流层飞艇飞行轨迹分析
2021-06-25马家兴全荣辉滕海山
马家兴,全荣辉,滕海山,杨 杭
(1. 南京航空航天大学航天学院,南京 210016;2.北京空间机电研究所,北京 100094)
0 引 言
近年来,具有载重大和长时间驻空能力的飞艇受到了各国的重视。它可以与地面基站、卫星等组成联合通讯网,也可以用于科学研究、森林火灾和地震预警等。因此在民用领域和军事领域都有广大的应用前景[1]。飞艇是当前无人飞行平台研究的前沿热点。目前平流层飞艇都是采用太阳能电池等能源系统,为电动机提供电能带动螺旋桨转动产生推力,从而巡航飞行或定点驻空。但在飞行过程中,飞艇的高度和速度产生变化,螺旋桨翼型的雷诺数和前进比发生变化,螺旋桨推进系统的拉力和效率迅速下降,无法提供足够的动力维持飞艇巡航飞行,而且在较高的高度(20 km以上),采用螺旋桨推进有着很大的技术难题没有得到解决,如电机装置在较低气压下减速器轴承和齿轮润滑问题[2]。
所以研究新型动力技术对于推进平流层飞艇的发展具有重大意义。在此基础上,离子风推进器因有着结构简单、机械磨损小、超静音工作与能量利用效率高等特点受到了广泛的关注,被认为是一种可能的长航时临近空间飞行器推进方案[3]。而且传统螺旋桨推进系统利用太阳能电池等能源系统来提供工作时所需的部分或全部能量,也为离子风电推进技术提供了条件。近年来,离子风电推进技术已有了初步的应用。2016年,文献[4]提出平流层浮空气球的控制力可以采用离子风推进器提供,并通过无线充电技术保证动力的持久。2017年,文献[5]研制出利用离子风动力飞行的微型机器人,能够实现垂直发射,通过收集机器人飞行姿态和加速度数据,仿真显示机器人实时飞行动态,实现了离子风在微型飞行器的应用。2018年,Barrett等[6]成功试飞全球第一架离子风推进无人机,用实际试验证明了离子风推进器可以用于固定翼无人机飞行。
由于离子风推进器在高空低温环境下能实现较大的转换效率[7-8],得到较大的推力,所以本文针对螺旋桨推进在较高高度上的推力和效率显著下降的问题,提出将新型离子风电推进系统应用于平流层飞艇,并通过模型计算分析飞艇巡航飞行轨迹变化,探索了离子风推进系统应用于平流层飞艇的可行性,为平流层飞艇动力技术革新提供理论参考。
1 离子风推进器数值模拟
离子风推进器是利用一种非对称高压电极组通过电晕放电将空气电离,离子在高压电场中实现加速,与中性气体发生碰撞并将动量传递给中性气体,从而产生推力。电极间距、电压和大气风速对推进器推力大小的影响很大,下面模拟分析这些因素对推力大小的影响。
1.1 风速影响
实际中,平流层大气密度比对流层下降了几个量级,同时大气风速也迅速增加,最大可以达到100 m/s以上,因此在平流层风场下的飞艇控制十分困难。根据文献[9],离子风推进器的推力性能与所处环境的风速和大气密度有关,离子风推进器中的总电流密度如下式:
j=sgn(q)·ρ(μE+v)
(1)
其中,q>0时,sgn(q)=1,q=0时,sgn(q)=0,q<0时,sgn(q)=-1,ρ为大气密度,μ为离子迁移率,E为电场强度,v为飞行速度。
Masuyama和Barrett估计了V>0对推力功率的影响。在他们的推导中,空间电荷效应被假设为可以忽略的,因此电场在电极间隙中近似恒定。则推功比为
(2)
其中,忽略空间电荷效应,E=Va/L,L为电极长度,A为推进器工作面积。从上式可以看出推功比随着速度增加而减小。根据Masuyama等人的构型,在COMSOL Multiphysics软件上构建相应模型,比较了大气风速对离子风推进的影响,其计算结果如图1所示。
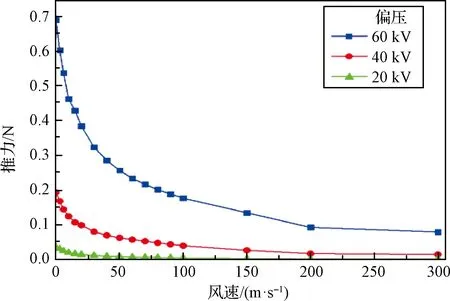
图1 不同偏压下推力随风速变化Fig.1 The thrust force changes with the wind speed at different voltages
从图1可以看出,随着风速增加,推力逐步下降,最终趋于稳定值,当风速为10 m/s时,推力值为原始推力(风速为0 m/s)的95%左右,当风速达到300 m/s时,推力值为原始推力值的10%至15%,但相比于螺旋桨推力呈量级下降,离子风推进具有一定优势。
1.2 间距和偏压影响
借助上面构建的模型,在标准大气压下进行,比较了不同电极间距和偏压条件的推力,并与实验测试结果相比较,如图2所示。
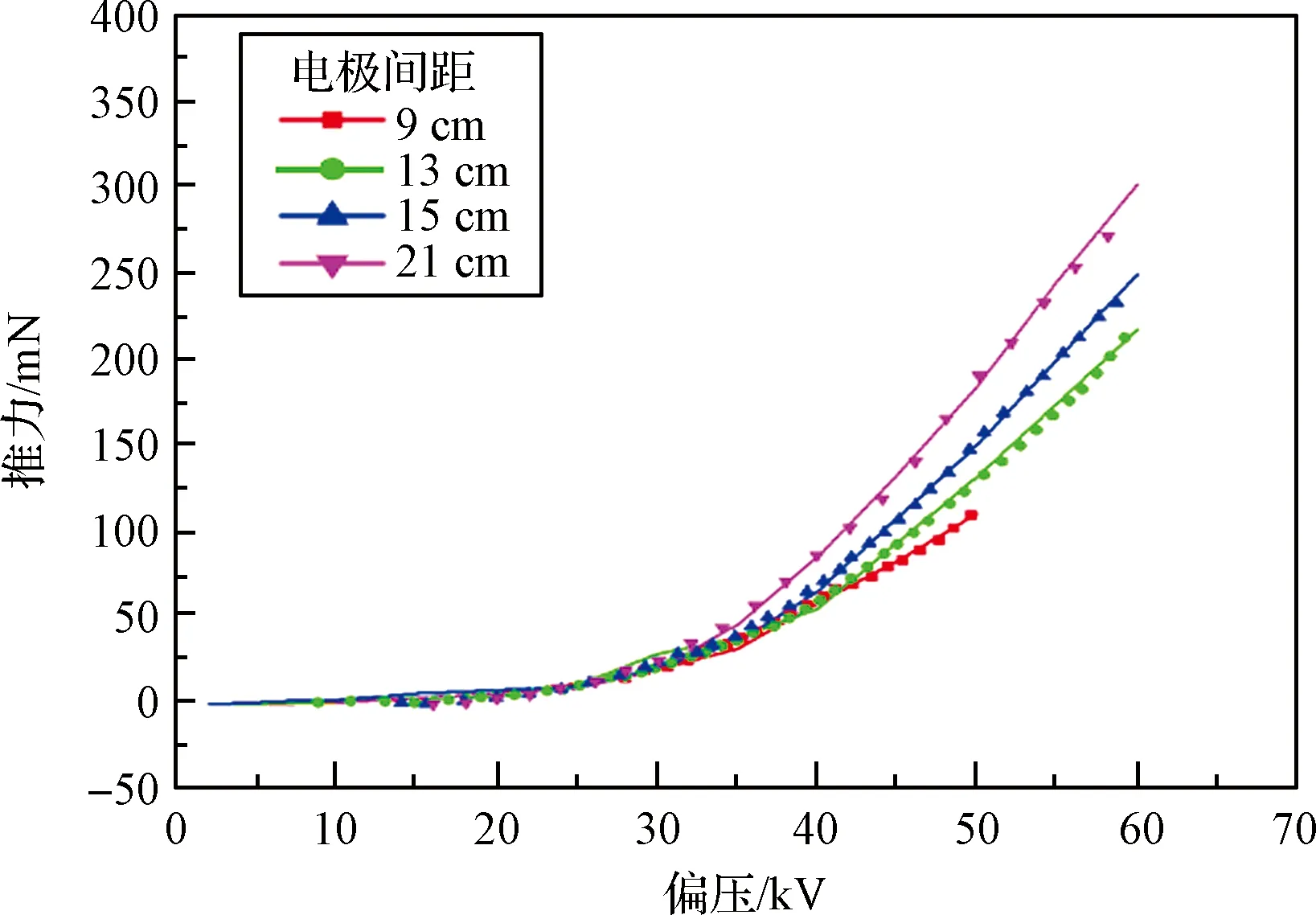
图2 不同偏压条件下推力变化(曲线为模拟结果,数据点为实验结果)Fig.2 Thrust variation under different voltage conditions (the curve is the simulation result, and the data point is the experimental result)
由图2可知,随着偏压增加推力在不断增加,且电极间距的增加有利于推力增加。在相同电压下,离子风推进器电极的间隙越小,所能产生的推力越大。在实际应用过程中,电极间距的增加过大会导致阳极附近电场减弱,使得离子浓度降低,进而使得推力降低。因此,实际应用时,需要施加较大的偏压和选取比较大的电极间隙d,可以得到一个较大的推力,本文中,推进器施加电压60 kV、电极间距为21 cm,总功率为40 kW,模拟计算的离子风推力直接传递给下节Simulink中的推力模型。
2 离子风推进飞艇的模型
飞艇在飞行过程中受到三大类外力作用:空气静力(含重力和浮力)、空气动力(气动压力和附加惯性力)和控制动力(螺旋桨或离子风推进器)。通过坐标系转换将所有力和力矩都转化到体坐标系中,再根据牛顿-欧拉方法建立飞艇的六自由度模型,本文只考虑在水平面内的飞艇运动情况,水平运动既包括前向运动,又包括侧向运动,不考虑垂直方向的运动以及横滚、俯仰运动[10]。因而:
w=0,p=0,q=0,θ=0,φ=0,α=0
(3)
则飞艇的水平方向运动方程如下[11]:
(4)
式中:
V=[u,v,r]T
其中,m为飞艇质量;m11,m22,m66为飞艇附加惯性力与附加惯性力矩;Ix为绕飞艇体坐标ox轴的转动惯量;xG,yG,zG为飞艇重心与体积中心的距离;T为推进器推力大小,μ为推力矢量与xoz面之间的夹角,ν为推力矢量在xoz面的投影与ox轴之间的夹角;lx,ly,lz为推力作用点到体坐标原点的距离;Q为动压,V为飞艇体积,CX,CY分别为阻力系数和侧力系数;Cn为偏航力矩系数。
3 飞艇仿真和结果分析
在本节中,为了分析所提离子风在平流层飞艇的应用可行性,在MATLAB/Simulink上进行了飞艇系统的仿真实验。模型物理系数已在相关研究中得到[12],列在表1中。
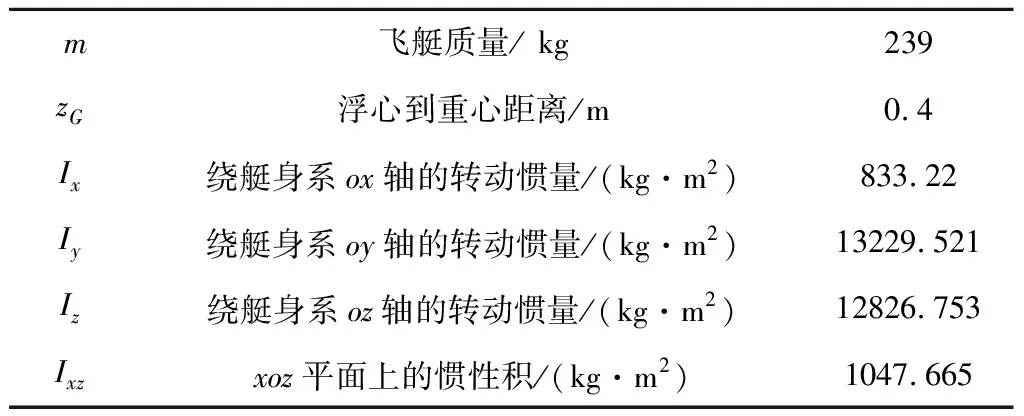
表1 飞艇物理参数Table 1 Airship physical parameters
3.1 Simulink仿真模型
本文采用一种基于Simulink与COMSOL Multiphysics结合的数值仿真方法。通常设计Simulink仿真系统需要根据飞艇实际飞行时每个量之间的关系将系统分解为相关的功能模块,再利用软件相关组件构建相应的仿真模型。飞艇的仿真模型主要分解为以下几个功能模块:飞艇动力学模块、风场模块、气动力计算模块、推力计算模块和控制器模块。
1)动力学模块
通常对飞艇建模都是将飞艇视为刚体结构,所以可以利用Simulink库中飞行器六自由度模型和自编的重力浮力计算模型组成飞艇的六自由度动力学模型,模块输出惯性坐标下飞艇速度、位置与姿态角、体坐标下飞艇速度、角速度以及从体坐标到惯性坐标的转换矩阵。
2)风场模块
利用Aerospace工具箱中的HWM风场模型和大气模型,模块输出大气密度与大气风速。
3)气动力计算模块
根据飞艇空速与风速计算速度矢量角,空速与大气密度计算动压,再在子系统中根据半经验公式[13]分别计算飞艇阻力系数、侧力系数、偏航力矩系数来算出飞艇气动力与力矩,最后模块输出飞艇的气动力和力矩。
4)推力计算模块
螺旋桨推力由螺旋桨转速、推力系数、功力系数和当地大气风速决定。离子风推力由施加电压、电极间隙和离子迁移率来描述,推力大小由COMSOL Multiphysics软件模拟计算。模块输出加载在飞艇上的推力和推力矩。
5)控制器模块
控制器模块由MATLAB语言编译,主要实现反演滑模控制算法[11],通过反馈飞艇系统的速度与姿态角设计控制律,模块输出控制力与力矩以及飞艇控制误差。将飞艇的平衡点作为动态仿真的初值,设定仿真时间,即可对整个飞艇系统进行动态仿真。
3.2 无控自由飞行仿真
1)控制策略
平流层飞艇分别在15 km,20 km和30 km高度达到浮重平衡,不加控制的在风场的作用下自由飞行。
2)结果分析
随着高度变化,平流层外界环境参数随之变化,飞艇在平衡状态下的参数也会发生变化。图3为平流层飞艇在不同高度下飞行12 h得到的结果。由图3可知,由于飞行高度不同,飞艇呈现出完全不同的飞行轨迹,且在15 km,30 km飞行高度上总位移均超过120 km。由此可见,飞艇在无控自由飞行下有较长的漂浮距离,且严重影响了实际应用性能。
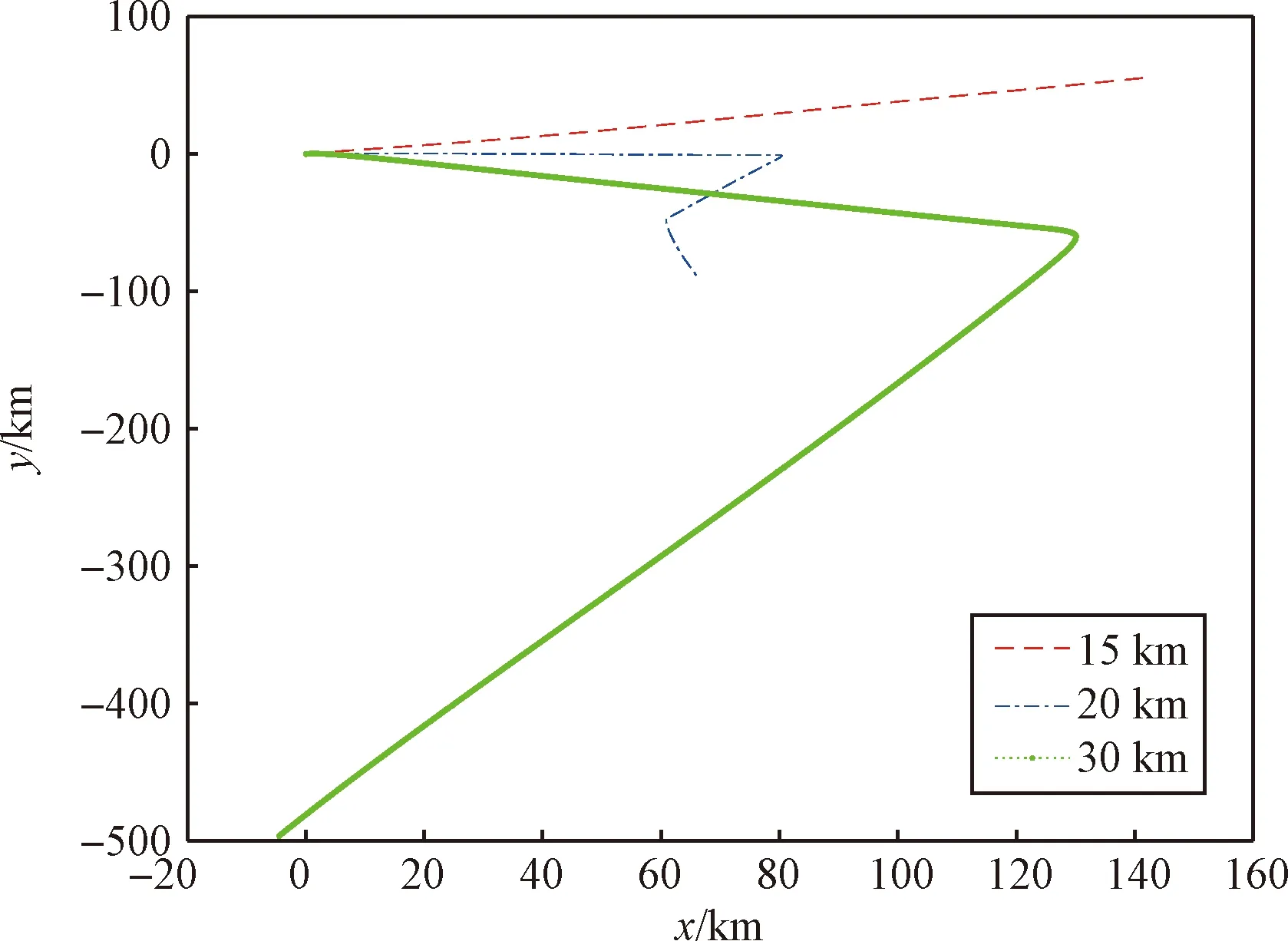
图3 15 km,20 km,30 km高度下无控自由飞行轨迹示意图Fig.3 Schematic of uncontrolled free-flying trajectories at altitudes of 15 km,20 km and 21 km
3.3 反演滑模控制飞行仿真
为了更直观证明离子风推进器是否可以作为飞艇的主动力,采取与螺旋桨做动力的飞艇仿真结果作比较。飞艇动力由直流发动机带动螺旋桨产生,通常使用矢量发动机,推力大小由螺旋桨转速控制,推力方向由螺旋桨的倾转角度控制。将推力矢量T沿体坐标系各轴进行分解可得:T=[XT,YT,ZT]T=[Tcosμcosν,Tsinμ,Tcosμsinν]T,推力对体坐标系原点的力矩为τ=[LT,MT,NT]T=[Tsinνly,Tcosνlz-Tsinνlx,Tcosνlz-Tsinνlx]T。
根据实验数据,推力的大小为发动机转速n与V的函数,可以拟合出[14]:
T=k1n2+k2nV
(11)
其中:k1=3.5979×10-7,k2=-6.7216×10-5。通过计算,与离子风动力相同功率下,螺旋桨推力在15 km、20 km和30 km高度上分别为240 N、110 N和20 N。
1)控制策略
利用第3.1节中建立的仿真方法,考虑大气扰动和高度对大气的影响以及风速的作用,基于李亚普诺夫稳定性理论得到了制导律,并采用反演方法得到期望速度。采用滑模控制的方法来提高系统的性能,在15 km,20 km和30 km高度上对飞艇做轨迹跟踪和定点控制仿真[15-20]。
2)轨迹跟踪仿真及结果分析
仿真指定轨迹为
ηd=[xd,yd,ψd]T=
[50000sin(0.00015t)m, 50000cos(0.00015t)m,
0.00015trad]T
初始位置和姿态角为η0=[x0,y0,ψ0]T=[0 m, 0 m, π/2 rad],初始速度为V0=[u0,v0,r0]T=[5 m·s-1, 3 m·s-1, 0 rad·s-1],飞艇巡航速度为10 m·s-1。仿真结果如图4所示。
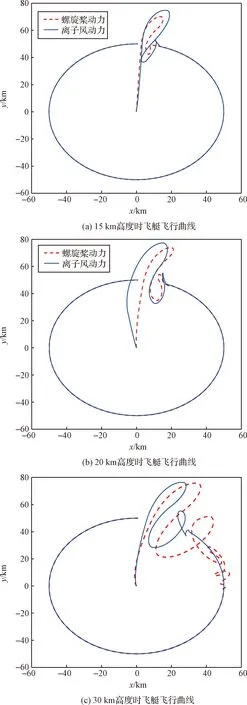
图4 飞艇在不同高度时飞行轨迹变化曲线Fig.4 The trajectory of the airship varies at different altitudes
图4给出的是飞艇做轨迹跟踪时的轨迹变化曲线。从图中可以看出,通过控制器不断调整,都完成了轨迹跟踪任务。15 km高度上,离子风推力飞艇Y方向偏移量为78 km,螺旋桨推进飞艇偏移量为76 km,相差2 km;X方向上偏移量相差0.5 km左右,两种动力飞艇飞行曲线差异很小;20 km高度上,两种动力飞艇X方向上位移偏离超过5 km;Y方向上相差1.3 km; 30 km高度上,相比于螺旋桨推进飞艇,离子风推进飞艇飞行曲线瞬态响应较快,振荡次数较少,控制效果较优。
图5给出的是飞艇做轨迹跟踪时偏航角变化曲线。从图中可以看出,15 km高度上,两种飞艇的偏航角变化差异很小,在500 s时,由于风速影响,离子风动力飞艇的偏航角有着较大的振荡变化。20 km高度上,偏航角变化趋势相同,控制响应时间都为1 h;30 km高度上,由于螺旋桨推力较小,为了克服风力影响,经过多次振荡变化,相比于离子风推进,曲线收敛较慢,控制响应时间为3.6 h。结果说明20 km以上高度,离子风动力飞艇飞行控制响应较优。
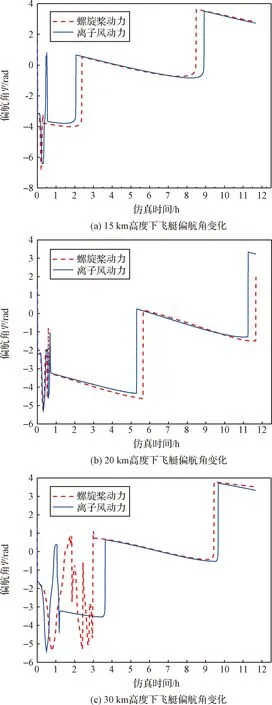
图5 飞艇在不同高度偏航角变化曲线Fig.5 Yaw Angle variation curve of airship at different heights
3)定点控制仿真及结果分析
仿真指定轨迹为
ηe=[xe,ye,ψe]T=[10000 m,10000 rad,0 rad],
初始位置和姿态角为
η0=[x0,y0,ψ0]T=[0, 0, π/2 rad],初始速度为V0=[u0,v0,r0]T=[5 m·s-1, 3 m·s-1, 0]。仿真结果如图6所示。

图6 飞艇在不同高度下飞艇位置变化曲线Fig.6 The position curve of the airship at different altitudes
图6给出了飞艇做定点控制时的轨迹变化曲线。从图6可以看出,15 km和20 km高度上,螺旋桨推进飞艇与离子风推进飞艇都比较好的完成定点控制任务,而30 km高度上,仅离子风推进飞艇比较好的完成了定点控制。在15 km高度上,螺旋桨推进飞艇的飞行曲线与离子风推进飞艇的飞行曲线没有很明显的差异,两者都以相同的趋势完成了指定飞行任务,但离子风推进飞艇Y方向偏移到14000 m,偏移量更大。20 km高度上,离子风推进飞艇X方向位移偏离到9820 m,Y方向上偏离到7500 m,而螺旋桨推进飞艇X方向位移偏离到9860 m,Y方向偏移到8300 m,离子风推进飞艇位移相对来说偏移量较大,振荡次数较多。30 km高度上,螺旋桨推进飞艇Y方向位移偏离到20000 m,偏移量相对很大,且曲线振荡次数较多,离子风推进飞艇以相对较优的飞行轨迹到达指定位置。
图7给出了不同高度下偏航角Ψ变化曲线。15 km高度上,飞艇偏航角收敛到零,螺旋桨推进飞艇比离子风推进飞艇的角度曲线收敛时间少400 s;20 km上,由于风场的影响,两种动力的飞艇偏航角都没有收敛到零,但螺旋桨推进飞艇收敛时间相对减少100 s;而30 km上,螺旋桨推进飞艇偏航角没有收敛至零,而离子风推进飞艇收敛时间为1800 s,相比螺旋桨推进飞艇收敛时间减少两倍,且偏航角收敛到零。角度曲线变化进一步说明在20 km以上的高度,离子风动力飞艇有更好的控制响应。
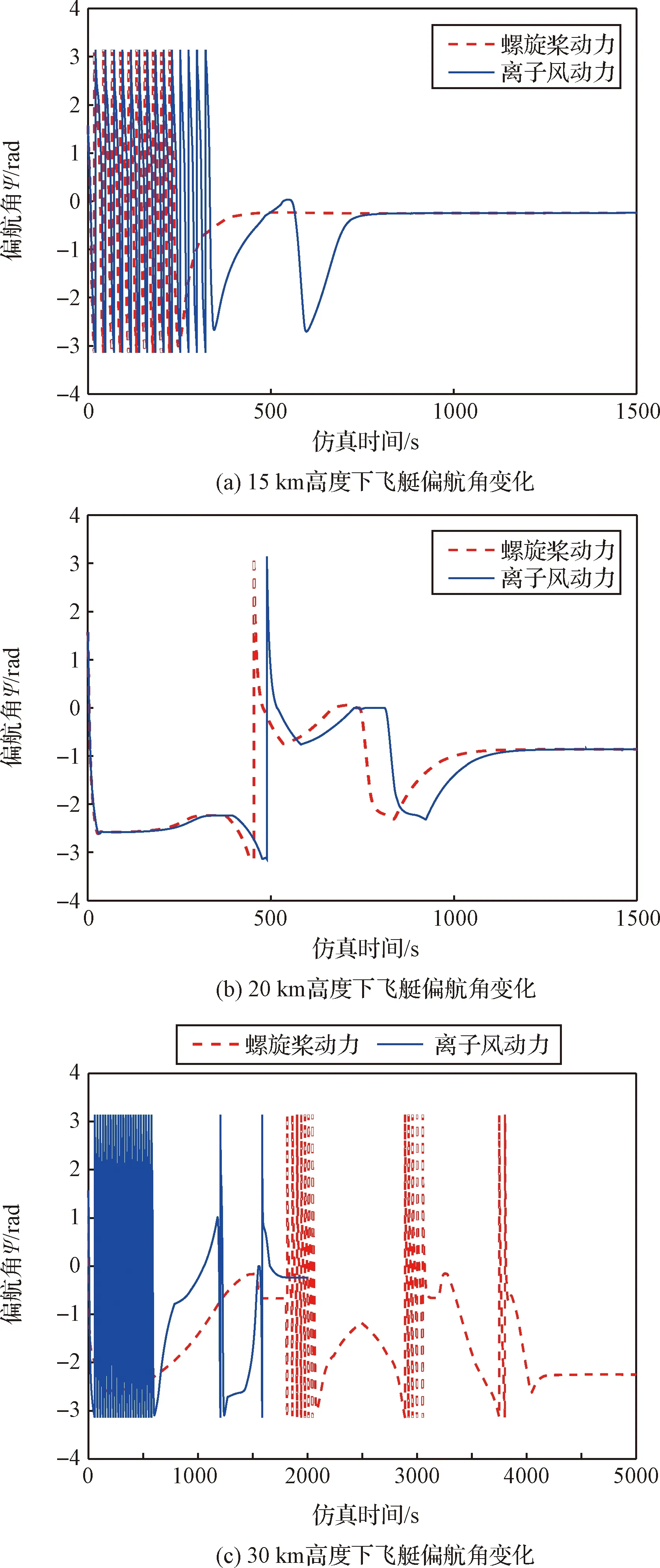
图7 飞艇在不同高度偏航角变化曲线Fig.7 Yaw angle variation curve of airship at different heights
从整个仿真结果可知,离子风作为飞艇动力实现了飞艇的飞行控制,相比于螺旋桨动力,在20 km以上高度时飞行曲线瞬态响应时间较短,控制偏移量较小。
4 结 论
离子风电推进系统是未来推进系统的重要发展方向,有着巨大的潜力。本文提出将新型离子风电推进系统应用于平流层飞艇,分别对采用螺旋桨动力和离子风动力的飞艇开展了动力学仿真研究。结果表明,40 kw功率下,20 km以上的高度,离子风推进飞艇的飞行轨迹控制偏移量和瞬态响应时间是螺旋桨推进飞艇的一半;通过优化离子风推进器的结构,选取最佳电压和电极间隙,有可能实现离子风作为飞艇的主动力。目前来说,在离子风推进的概念证明中,可以实现与传统螺旋桨推进相当的推力功率比,但总体效率和推力密度还很低。如果改进总体效率与推力密度,可以使离子风推进技术在平流层飞艇上开辟新的设计空间和应用领域,传统螺旋桨的局限性将不再适用。