基于CAN总线的船舶电站监控系统及数据融合路径
2021-06-24张家洪
张家洪
(中港疏浚有限公司,上海 201900)
船舶电站能够实现机械能与电能之间的转化,同时更好地监控、分配、测量和保护船舶。目前船舶电站监控系统存在几个问题:
(1)灵活性不足,尤其是控制仪表、通信等功能,使用复杂、效率较低;
(2)船舶电站各机组的综合利用率相对较低,增加了能源消耗,安全系数不高;
(3)当前的技术电流检测仪灵敏度不高,造成检测数据与实际情况存在较大误差;
(4)无法将检测到的电流、电压、温度、短路状态等信息及时转变为量化信号,不能进行无噪声的收集,对储存数据信息以及交换机处理存在消极影响;
(5)目前仍无法正常反映检测信息,数据读取无法快速、全面进行,工作效率较低。
为了解决船舶电站监控系统存在的问题,本文采用基于CAN总线的船舶电站监控系统融合数据,提升机组的综合利用率和系统的安全运行能力,节约船舶的运行成本[1]。
1 基于CAN总线技术进行船舶电站监控系统结构设计
舶电站监控系统结构如图1所示。
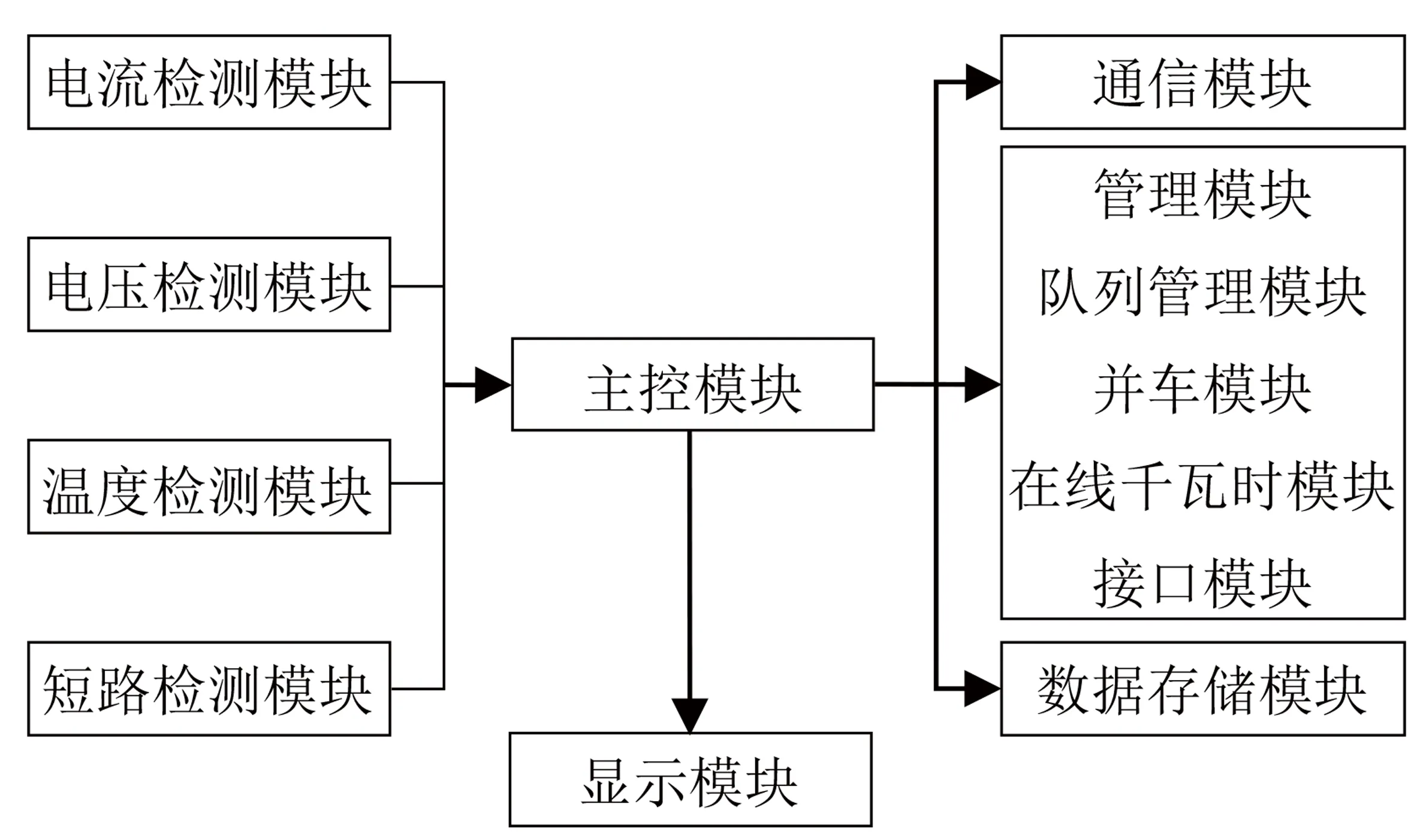
图1 基于CAN总线技术的舶电站监控系统结构
提前连接主控模块、电压检测模块以及电流检测模块,利用单片机对上述模块进行控制。
检测模块主要对有关数据信息进行检测,包括船舶电站电压、电流、短路状况、温度等;通信模块在CAN的作用下使电站仪表实现通信;管理模块使各机组设备能够有效工作;数据存储模块对检测模块所检测到的有关数据通过存储器进行存储;显示模块将检测到的各种数据信息及时在显示器上进行反映。
管理模块共有4个部分,包括接口模块、队列管理模块、在线千瓦时模块、并车模块。接口模块用于与外部设备连接,如果电站监控系统和外部连接,即为虚拟设备;队列管理模块用于提供功率信息,以队列方式对各种程序进行管理;在线千瓦时模块对各队列的权值、需求进行计算,以便队列模式能够高效运行;并车模块可以进行负荷分配、启动机组顺序以及自动并车。
2 通信模块通信方法
船舶电站所有仪表的通信均利用优化的CAN协议进行,通过重新定义应用层协议中的标识符实现CAN协议的优化。
CAN2.0B有两种应用层协议,一种是标准格式,另一种是扩展格式两种数据帧:
(1)标准格式。
标准格式数据帧仲裁场共包括RTR以及11位标识符,IDE、R0、DLC位组成了控制场;SRR、IDE、RTR和29位标识符共同组成了扩展格式数据帧仲裁场,控制场由R1、R0、DLC组成。
(2)扩展格式。
扩展格式数据帧仲裁场标识符具有多种功能,4位功能码对报文的优先级进行规定;在4位组号中有用于网络全局广播的1组中组号,共15组中组号;原地址码和目的地址码分别占8位,仪表的唯一地址由16位地址码对应;4位数据用于对传输的数据类型进行定义;1位多帧标识,如果数据传输显示大于8个字节,需要多帧进行,此时多帧标识位是1,如果小于8个字节,则显示为0。
3 数据融合技术的基本原理
数据融合技术是一种可以实现多源信息融合处理的新型技术。该技术最早应用于20世纪70年代初的美国国防部声呐信号处理系统,经过不断发展,该技术已推广至军事、工业、金融及空中交通管制等多个重要领域。数据融合涉及不同层次、不同方面的数据处理,通过对多元数据进行检测、读取、判断、组合,科学分析其状态及身份,对获取的数据进行全面、合理的态势评估和威胁评估。
船舶电站控制系统中会不同限度存在部分谐波,会对电站的正常运行造成一定影响,因此在利用传感器测量时,会掺杂部分测量噪声,造成传感器获得的信息与实际数据存在误差,同时也会降低电站系统的安全可靠性。
对此,数据融合技术采用多传感器并行处理的方式,即根据传感器冗余,最大限度降低测量噪声对数据的影响。通常情况下,冗余数据融合的方法主要有加权平均法、卡尔曼滤波法、贝叶斯估计法等。
4 船舶电站监控系统中数据融合技术的应用
外部存在干扰源的情况下,如电磁谐波,通过检测模块对船舶电站监控系统中的相关数据进行检测,得到的参数可能存在偏差,不利于进行精准监控。数据融合技术具有科学性和先进性,传感器能够得到充分利用,可以将检测到的数据进行融合处理,减小数据误差,使系统更准确[2]。
4.1 船舶电站监控系统的现状
为了实现船舶自动化,需要先实现船舶电站自动化,反映船舶的自动化程度。船舶电站的监控技术与机舱的控制技术存在较多共同点,二者都是在充分利用通信技术、微处理技术、控制技术的基础上,进一步优化完善。现阶段,该技术仍存在两个突出缺点:
(1)DCS利用的通信网络是非标准的,网络在进行制定时,不同公司所采取的标准不同,导致该系统具有一定封闭性,不能进行开放互连。
(2)主从式的DCS网络包括操作站、控制站、现场仪表三层结构模式;为了保证正常运行需要花费更多的资金,如果网络系统出现故障,会直接导致控制系统停止运转。
基于DCS系统以上两方面的显著缺点,对CAN等现场总线技术不断进行完善,尝试在传统的船舶电站监控系统中融入现场总线技术,构建以现场总线技术为重心的现场总线船舶电站监控系统。
4.2 基于CAN的现场总线控制系统FCS
(1)CAN现场总线协议的特点。
①应用主结构网络,区别于常用的主从网络形式;
②适宜用不同类型的微控制器连接;
③应用无损结构的逐位仲裁,实现总线的优先权访问;
④遇到故障时,自身的处理能力较强,如果出现故障,能够自动脱离总线;
⑤短帧结构更稳定,针对网络干扰的保护能力更强。
(2)基于CAN现场总线的FCS的特点。
①与传统技术相比,该系统为“工作站现场总线-智能现场设备”模式,只需要两层设备进行功能转换,而传统系统中至少需要三层设备才能完成功能的发挥;
②开放式现场总线采用标准通信网络,能够实现多种厂商、多种网络的匹配、融合及数据处理;
③与DCS网络相比,FCS大幅度减少了专用I/O装置的使用,同时控制站的多种功能都可以通过现场设备实现,控制功能的分散性明显提升了网络系统的安全性,防止一种功能故障影响系统整体的运行;
④能够及时监测并排除FCS现场设备的部分故障,提高网络系统的自检能力;
⑤发生故障时,相关节点能够自动脱离总线,避免某一节点故障导致系统瘫痪。
4.3 组建基于CAN的现场总线船舶电站监控系统
该系统网络通信利用CAN现场总线,并采用双绞线作为通信线。对船舶的运行条件进行估算后,通信速率确定为250 kbps(270 m)。通信网络在此速率条件下,优势较为明显。测量箱节点、电站控制管理以及微机控制节点共同组成系统。管理模块的运行通过电站控制微机完成管理,SJ1000控制器均被应用在测控节点、测控节点通信CAN适配卡以及CAN通信适配卡中,控制器接口微处理器被应用在芯片80C250CAN上[3]。
为了将网络数据传送到计算机应用程序中,必须应用CAN适配卡,改卡选取双口RAM,主要作用是保护中央处理器和微处理器,进行数据的读写与存储。为进一步提高网络通信的实时性,CAN通信网络选用优先级最高的外部中断。该系统在定时中断发送的过程中,诱导帧进行诱导,并开始计数,为了避免数据出现发送死循环,最终出现没法正常退出的情况,需要在发送号数后及时中断发送。
诱导帧动作也会占用总线时间,因此在系统中尽可能详细输入故障检测信息,系统自检时能够及时检测出相关故障,一方面可以节省数据传输的时间,另一方面便于技术人员及时进行故障处理。
5 结语
文章引入基于CAN总线技术设计的船舶电站监控系统,对该系统如何进行数据融合进行总结,通过监控系统对收集的各种数据信息进行量化,在数据完成储存、转换的同时,增强系统数据信息自身的抗干扰和无噪声积累能力。分析数据融合技术的基本原理后,结合数据显示、故障自检等功能,便于对检测数据的合理掌握,明显提高了船舶电站监控系统的工作效率。