直升机关键技术及未来发展与设想
2021-06-24吴希明牟晓伟
吴希明,牟晓伟
(中国航空研究院,北京 100129)
0 引 言
直升机作为特殊的航空飞行器,具有垂直起降、空中悬停、前后左右飞行、超低空贴地飞行等特殊能力。这些特点和能力是固定翼飞机和其他交通工具所不能替代的,也决定了直升机在维护国家安全、国民经济建设、社会发展中具有重要的战略地位。
自1942年直升机首次装备以来,全世界累计交付直升机约10万架,目前仍在使用的约5万架[1-2]。直升机作为现代军事装备发展的重要方向,执行了大量武装攻击、机动运输、搜潜反潜、侦查指挥和特种作战等任务,在世界各次局部战争中发挥了重要作用。民用方面,直升机在应急救援、护林防火、反恐缉私等维护社会安定和经济稳定的各个方面发挥着重要作用。由于直升机的特殊功能和军民两用的广泛性,直升机产业已经成为事关国家安全、经济发展、社会进步的战略性产业。
不同于固定翼飞机前飞时机翼产生升力,直升机通过桨叶旋转产生升力,利用桨叶攻角改变引起旋翼升力变化来实现垂直升降,通过桨盘倾斜来实现前后左右飞行,利用尾桨推力变化来实现与旋翼的扭矩配平并控制航向,各种飞行操纵存在着高度的耦合。
除了特有的旋翼和传动系统,直升机其他组成与飞机类似,并有独特的抗撞击、耐坠毁和防砂等要求,研发过程中需要进行大量的试验,是典型的多学科、多领域高度融合的复杂系统工程。
我国直升机事业起步于1956年苏联米4直升机生产线的引进,先后经历过20世纪80年代的直9生产线引进、直8测绘仿制、直11参考设计,以及各个机型的加装改型。自20世纪90年代开始,在关键系统国际合作支持下,以直10直升机为抓手,开启了我国直升机的自主研发和产业体系建设,目前已形成12个机型约60个改型的产品系列[3]。
1 直升机关键技术
直升机飞行原理特殊,其复杂的气动设计、结构动力学、极致重量设计等是直升机设计的难点。
1.1 高精度气动分析
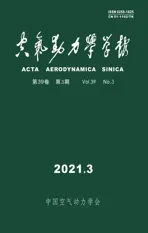
飞行中的直升机旋翼和机身持续处于高度动态的气动环境中,旋翼流速跨度大,可压与不可压流动并存,前行桨叶处于跨声速区域,桨尖产生激波,后行桨叶出现气流分离与动态失速现象,并且桨叶脱体涡、尾随涡、桨尖涡等螺旋尾迹复杂,旋翼流场存在强烈的桨涡干扰现象[4]。因此常规气动分析和设计方法仅能定性指导研究工作,需要进行大量的试验和试飞以完善和确定产品设计。随着计算机技术的进步,用于直升机空气动力学计算的CFD软件技术突飞猛进,网格技术出现了结构化网格、非结构化网格、笛卡尔网格、蝇网格等[5],并且从单一网格到并行重叠网格、嵌套网格、多网格、自适应网格,甚至多个异构求解器耦合,同时在算法上,采用自由尾迹模型、涡量输运模型等效率更高更精确的模型[6]。这些技术极大地提高了求解精度,并降低了能量耗散。图1为直升机旋翼气动仿真结果。
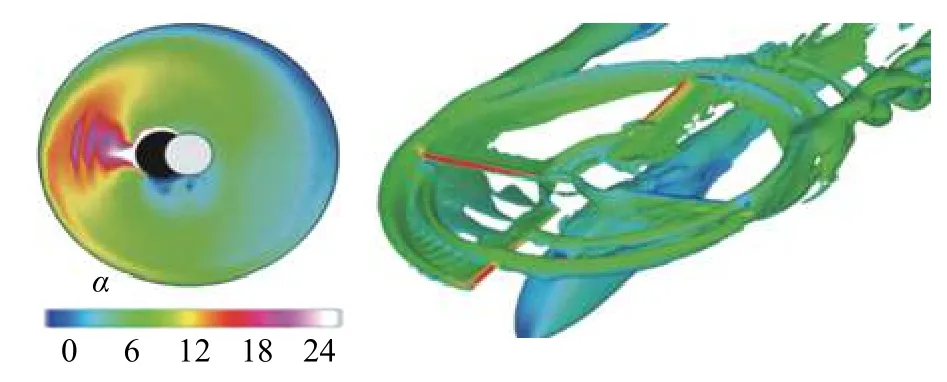
图1 直升机旋翼气动仿真Fig. 1 An aerodynamic simulation of a helicopter rotor
1.2 振动与噪声
在世界直升机界有“振动是直升机的永恒课题”的说法。直升机振动水平也是公认的直升机先进性标志之一。直升机振动主要来源于旋翼、尾桨、发动机、传动系统以及旋翼尾迹干扰和武器发射等,主要表现为宽带随机振动背景叠加多个定频正弦振动。为承受复杂动态气动力和动力学载荷,直升机桨叶必须具有一定的变形和运动特性,桨叶的各阶、各向固有频率应避开旋翼工作频率,以免发生共振。此外,考虑到直升机传动系统和发动机转动部件繁多,直升机结构和各系统动力学特性应充分避开运动部件及控制系统的各阶固有激励频率[7-9]。武装直升机武器发射是直升机振动源之一。如其机翼上可配挂多枚导弹和火箭弹,各种发射状态下机弹尾焰相容和机翼动力学多状态兼顾技术难度很大,特别是武装直升机机头航炮,其头盔控制范围大,相对机身做变角度运动射击,机头弹箱炮弹不同消耗状态和执行不同方位攻击时,射击频率和机身结构与系统共振是直升机关键技术之一。
直升机的噪声主要来自于旋翼、尾桨和发动机。由于直升机前飞时旋翼桨盘基本平行于大气来流,高速旋转的桨叶持续处于桨盘非定常尾流之中,气动环境复杂多变,导致直升机噪声环境严酷并且改善难度较大。目前常规直升机舱内噪声在100 dB左右,50 m处噪声在120 dB左右[8-9]。图2为直升机噪声源。

图2 直升机噪声源Fig. 2 A sketch of the helicopter noise source
随着直升机减振技术的发展和主动控制技术的成熟,直升机振动水平已经下降到0.05g。其中旋翼系统的振动主动控制、结构振动主动控制技术、先进的桨叶间阻尼器以及主减阻尼器等,这些技术在很大程度上都对直升机减振降噪做出了贡献[10]。尤其是变形旋翼、主动控制襟翼、主动扭转旋翼等智能旋翼技术的发展,为从根本上解决直升机振动和噪声问题带来了希望。基于CFD/CSD建立的智能旋翼高精度气动、噪声、振动载荷预测方法,为理论分析提供了有效的手段。研究发现,高阶谐波控制(HHC)技术和单片桨叶控制(IBC)技术能够有效降低振动载荷水平60%~90%,同时降噪8~12 dB;主动副翼控制(AFC)可减小由桨尖涡引起的振动70%~90%,同时降噪6~10 dB[11]。
1.3 地面共振/空中共振
直升机构型可以简单地看作以旋翼桨毂中心连接的两个振动系统。异常激励后导致的地面共振和空中共振是世界直升机多发事故原因之一。
直升机桨叶摆振会导致整个旋翼的重心发生变化,旋翼重心绕旋转中心的转速与旋翼转速不一致,当其转速小于旋翼转速时,形成摆振后退型振动。当这种摆振后退型振动与机体模态耦合,存在发生地面共振的可能[12]。而随着无铰旋翼的应用,由桨毂力矩引起的机身振动频率若接近桨叶摆振频率,则可能引起空中共振。空中共振需要考虑的因素很多,包括桨叶挥舞、摆振、机体运动、空气动力等多种因素,是复杂的直升机动力学问题。随着直升机振动主动控制技术的发展,地面共振和空中共振主动控制技术应运而生。通过桨叶的高阶桨距控制来改变摆振平面内的气动阻力和惯性力,或是通过控制桨叶挥舞运动来控制桨毂力矩来控制机身,是地面共振和空中共振主动控制技术的主要发展方向。RAH-66直升机就采用主动桨距控制技术来增加旋翼与机身的耦合阻尼,从而抑制空中共振的发生[13]。图3为直升机挥舞振动分析结果。

图3 直升机振动分析Fig. 3 A helicopter vibration analysis
随着舰载直升机的发展,“舰面共振”问题已经成为直升机上舰需要面对的重要问题之一。由于舰船的运动特性,舰载直升机的旋翼与机身耦合问题相对于地面共振和空中共振更为复杂。此外,舰面起降时低速运转的旋翼受到的舰船空气尾流的影响,结合舰船运动引起的桨叶惯性力,容易使直升机桨叶产生桨叶航行现象[14]。直升机“舰面共振”与地面共振和空中共振理论基础基本一致,解决这一问题主要从提高旋翼摆振刚度和提高阻尼两方面入手。
1.4 抗坠毁要求
由于直升机的特殊构型,高速旋转的旋翼让直升机驾驶员空中跳伞逃生实现难度大,因此直升机必须具备坠毁后的人员安全设计。根据世界直升机坠毁速度统计,目前军机民机人员坠毁生存最高要求是在垂直接地速度12.8 m/s条件下的所有坠毁情况下具有95%生存概率[15]。抗坠毁研究的主要内容包括评估起落架系统及机体结构的吸能能力。起落架变形能够吸收部分能量,在起落架破坏的情况下,考虑机体结构对剩余能量的吸收,需要机体结构在综合性能方面具有足够的强度和良好的塑性变形能力,以便最大程度地吸收能量,减缓冲击力造成的破坏[16]。现阶段,可以通过有限元方法准确预估结构的非线性瞬态动力学响应,以分析起落架抗坠毁设计的合理性。此外,抗坠毁座椅技术的发展可以进一步减少直升机坠毁对人员的伤害。抗坠毁燃油系统可以在直升机坠毁时防止燃油泄漏起火,保证人员安全[17]。随着大应变弹塑性动力学、连续损伤力学、高速冲击动力学、计算结构力学、动态断裂力学及计算机软件技术的发展,可以满足直升机抗坠毁技术的研究需求。新材料和新结构形式的出现,增强了直升机抗坠毁特性,增强了对人员的保护,让直升机变得更加安全。图4为世界范围内旋翼飞行器坠毁事故垂直速度分布结果。
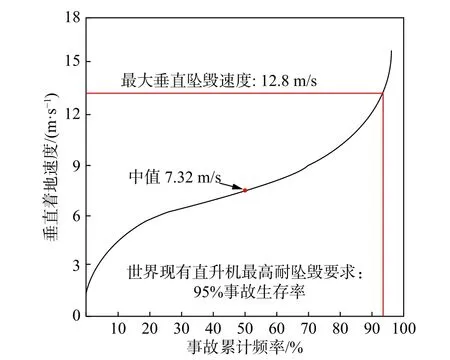
图4 世界旋翼飞行器坠毁事故的垂直速度分布Fig. 4 The relation between the vertical velocity and the crash accumulation frequency
1.5 安全性
安全性是直升机设计工作的重中之重,是民机适航验证的核心要求。通过安全性分析,得到影响安全的关键系统和部件,并在设计上采取备份或冗余设计,充分考虑最苛刻的使用条件并进行试验验证,是保证达到安全性设计目标的最有效方法。
直升机安全性设计主要包括:桨叶遭受雷击后安全飞行0.5 h[18];传动系统失去滑油后干运转0.5 h[19];主电源系统失效后应急供电30.5 h[20];发动机全部停车后安全自转着陆[21];旋翼桨叶及座舱风挡玻璃等遭受鸟类撞击后继续飞行[22];航电系统及机载设备防雷击和防高强辐射场[23];军机旋翼、燃油、传动、座椅、操纵等主要系统耐弹击设计等。
1.6 重量控制
直升机因多用于低空飞行,所以对机动性、安全性和生存性提出了更高的要求。直升机特有的旋翼、传动和发动机“三大动部件”技术复杂,研制难度大,同时考虑到振动和噪声特性,以及作为产品对安全性、可靠性和舒适性等方面的技术要求,更增加了设计难度。直升机飞行重量低于同等发动机功率的固定翼飞机,导致全机重量设计要求极其苛刻。直升机各系统同样需要经受内部环境的严格考验,例如:直升机航电系统较固定翼飞机重量轻40%左右,而其热环境、振动环境和电磁环境更恶劣,对系统及设备的性能和指标提出了更高的要求。
重量与直升机成本有着紧密的联系。美军在对现代作战飞机的成本进行参数法估算时,将成本估算关系式(CER)抽象为:生产成本 =f(重量,速度,产量)。建立各部件/系统的重量估算模型和成本估算模型,有利于掌握直升机生产成本并实行有效控制[24]。
2 世界直升机技术未来发展方向
当前,国际直升机未来发展方向主要聚焦于高速、智能、无人、安全、环保、舒适和多元化等方向。
2.1 高安全性
安全性是直升机永恒的主题。结合现有安全性技术进一步深化完善,集成直升机健康状态监控、使用维护、人工智能、电/光传飞控、综合航电等技术的研究成果[25],实现直升机能力提升,解决直升机“无忧”操纵与“智能”飞行等技术问题。随着传感器技术的进步和HUMS系统的不断发展,直升机健康状态监控技术日趋成熟,其中包括直升机旋翼状态监测、直升机结构健康监测等,通过对旋翼及结构关键点的振动特性和力学特性的实时监控,可以保障直升机的安全[26]。声发射信号同步数据采集与无线传输技术让实时监控成为可能。同时伴随着大数据技术和人工智能技术的发展,将直升机健康监测数据上传到特定的平台进行数据处理,进而形成状态报告,结合人工智能技术,可以实现不同故障案例的整合与分析,从而制定更优的解决方案[27]。同时,借助电/光传飞控、综合航电技术的发展,通过基于机器学习的人工智能技术,模仿和学习大量人类飞行员的操作,建立起飞行数据和飞行员控制指令的数据映射,形成优于人类驾驶员的智能操作系统,可以提升直升机的安全性。图5为直升机健康监测系统。
2.2 绿色低碳
当前国际上以“绿色直升机技术”专项研究为牵引,推动了新型旋翼、机身及桨毂减阻、振动抑制、噪声抑制、柴/电/混合动力发动机等一系列重大基础技术的发展和型号应用[28]。上述技术中,除了柴/电/混合动力发动机技术以外,其他几项技术是通过减小阻力、降低振动来减小需用功率,从而减小发动机功率达到节能减排的目的,同时也降低了直升机噪声,减少噪声污染。而柴/电/混合动力发动机技术则是直接降低直升机碳排放。电动飞行器是世界各国重点发展的未来飞行器主要技术方向,是实现绿色航空的重要途径。随着新概念布局、气动结构一体化、电推进、超导动力传输等关键技术的发展,电动飞行器研发突飞猛进。而电池、电动机技术上的突破,更是助力电动飞行器实现技术突破[29]。但是电动飞行器所涉及到的关键技术还需要一段很长的时间来获得彻底的解决。相比于燃油的能量密度12 700 kw·h/kg,目前电池能够达到的最大能量密度为500 kw·h/kg,差距还很大。处于巡航状态的大型飞机所需的能量密度为1 kw·h/kg,未来10~15年,化学电池能量密度可以达到1~1.5 kw·h/kg,完全能够满足电动飞行的需要[30]。电机技术也是电动飞行器发展的关键,根据美国电动机技术发展路线图规划,到2025年电动机系统功率密度可以达到5.7 kw/kg[31],同时借助航空高压直流电源技术,发展270~540 V高压直流电源技术,将加快绿色航空出行成为现实。
2.3 无人旋翼机
无人化技术具有零伤亡、无生理限制、耐恶劣环境使用等技术特点,成为未来发展的必然趋势。而便携、隐蔽、任意突防和驻留等能力使微小型旋翼飞行器在未来军用民用领域具有更大的发挥空间。而自主飞行控制、多机协同、多栖起降和高效新能源等关键技术是无人旋翼机后续发展必须研究的关键技术。无人直升机受环境、信息传递、操纵时延等因素影响,其适应性相对有人直升机有一定差距。随着智能感知、环境探测、智能控制、机器学习等智能技术的发展与应用,无人直升机将迎来技术上的突破。同时微型直升机作为无人直升机的一个分支,其发展前景广阔。随着低雷诺数空气动力学、微型化制造、微型电机、微型动力及飞行控制技术的进步,微型直升机性能正在稳步提升。PD-100黑色大黄蜂微型直升机重量仅16 g,飞行时间20 min,是已经参与实战的成功典范[32]。有人与无人机协同技术更是让任务完成率提高10%以上,并可为指挥员提供更多的信息。自1992年以来,美国陆军针对有人/无人协同发展开展了技术研究工作,并实现了阿帕奇与“捕食者”无人机之间的任务处理器完全融合[33]。有人/无人协同的基础是攻击规划、无人机管理、传感器管理、路径管理、态势感知显示、无人机控制、编队管理、通信管理、交战管理等关键技术的突破。实现有人机对无人机的有效控制,必须掌握协同通信、数据融合、决策辅助、信息分发、人机交互等关键技术。
图5 直升机健康监测Fig. 5 The helicopter health monitoring
2.4 人工智能
近年来,随着算法及运算能力大幅提升,在计算机视觉、自然语言处理、智能控制等领域获得了重大突破,人工智能由计算智能、感知智能,加速走向认知智能,从单一智能向基于情景模式的感知、学习、抽象和推理演化,面向功能和场景的机器学习、深度学习、强化学习成为技术创新热点。机器学习与推理、自然语言理解、人机融合等成为军事人工智能算法的主要方向,利用算法从文本、声音、图像、视频中获取、挖掘信息,并处理信息,感知周围态势,做出合理判断是其主要研究方向。而直升机平台与人工智能的融合将在智能飞行、多机智能协同、任务自主智能等方面颠覆传统直升机使用模式。其中网络协同、操纵控制、人工智能和快速重构等方面是旋翼机后续发展的关键技术[34]。基于神经网络、迁移学习、深度学习以及流行学习等先进理论,发展而来的强大的图像处理以及目标检测、鉴别和识别算法,为直升机智能化开辟了新的方向[35]。完全自主的智能化直升机关键技术还需要一段时间的研究,混合增强智能操控技术、智能自主飞行技术以及通过机器智能辅助来降低驾驶员反应时间、提高执行任务准确度,是现阶段人工智能在直升机智能化方面发展的重点方向之一[36]。图6为直升机智能化应用构想。
2.5 高速直升机
直升机高速化一直以来是直升机行业不停追求的目标。受飞行特性的限制,直升机前行桨叶在来流速度为马赫数0.9左右会产生激波,导致阻力激增,铰链力矩和交变载荷增加,噪声增大,后行桨叶升力攻角过大而失速会引起严重振动。设计上的平衡让传统直升机桨尖速度在200~220 m/s,对应前飞速度被限制在100 m/s之内。为突破这一限制,世界各国针对高速新构型旋翼机开展了大量的技术探索和研究。目前主要有三种非常规构型,其中倾转旋翼机构型更适用于运输(如美国V-22),复合推力直升机更适用于武装攻击(如美国SB-1),而旋翼停转或收进式飞行器目前尚处于探索阶段[37]。图7为高速旋翼飞行器发展方向。

图6 直升机智能化应用构想Fig. 6 A conception of the intelligent application of helicopters

图7 高速旋翼飞行器发展方向Fig. 7 The development directions of high-speed rotary wing aircrafts
2.5.1 复合推力直升机
在复合推力直升机构型研发中,SB-1的共轴刚性旋翼机构型是其发展的主要方向。该构型放弃桨盘左右平衡,以对称前行桨叶为主提供升力,并由桨叶刚性保证降低转速后的升力保持和上下桨叶间距,从而可降低桨叶转速、提升飞行速度。这种构型直升机在飞行高度、速度和航程等基本能力上得到加倍提升,同时机动性、外部尺寸等都优于常规直升机[38]。
新构型相对常规直升机在总体气动布局、刚性桨叶、传动系统、操纵系统、综合动力控制等方面需要建立全新的科研技术能力,同时必须注重解决振动大和旋翼桨毂阻力高等关键技术。
2.5.2 双旋翼倾转旋翼机
以贝尔公司为代表的欧美一流直升机研发机构均在大力推动倾转旋翼机的研制,在V-22批量列装的基础上启动了第三代倾转旋翼机方案论证,并已完成V-280倾转旋翼机试验飞行。
倾转旋翼机在大航程飞行时任务效率远高于常规直升机。图8是常规直升机、固定翼飞机和倾转旋翼机的使用高度和速度包线。倾转旋翼机兼具常规直升机和定翼机两者能力优势[39],后续型号V-280基本覆盖两者能力。该构型相对常规直升机在总体气动设计、倾转旋翼、倾转机构与传动系统、飞行控制等方面需要建立全新的研发技术,特别是过渡飞行控制是重大难点,V-22科研机和部分在役机的坠毁大都与此相关。
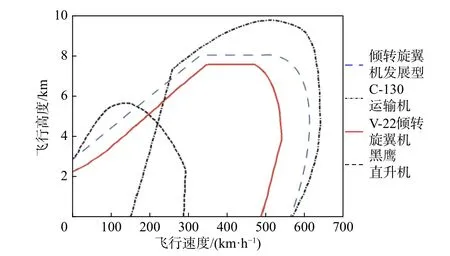
图8 双旋翼倾转旋翼机飞行包线Fig. 8 Flight envelopes of tiltrotors
2.6 多元直升机
目前,我国直升机行业也正积极探索其他具备高速、长航程以及垂直起降特征的新构型旋翼飞行器技术,尤其关注“破坏性创新”技术的出现,以期为我国未来新构型旋翼机的研制建立基础。
未来旋翼飞行器将向多元化发展,包括构型多元化、功能多元化和使用多元化等。未来多栖旋翼飞行器能使灵活自由出行变为可能。
3 我国直升机技术后续发展有关设想
3.1 先进直升机旋翼桨叶翼型设计技术
目前直升机旋翼桨叶外形是考虑多种因素的折中设计,以一种固定状态进行整体攻角变化,无法实现性能、振动与噪声等设计要素的全面最优化。至今世界各型直升机的桨叶外形设计是综合考虑动力学特性、材料和结构特点、制造可实现性等,对各飞行状态下桨叶桨尖形状、翼型布置、桨叶攻角分布等进行分析优化后的折中设计。
不同吨位、不同任务目标的直升机,在高原和海上等不同使用环境,在悬停、前飞等不同飞行状态,直升机总体参数和旋翼桨叶展向各处在旋转不同方位处的翼型、尺寸和攻角理想的设计参数都不一样。图9为智能旋翼建模及主要结构。
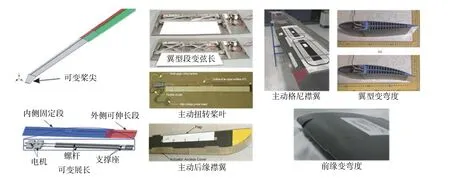
图9 智能旋翼Fig. 9 Smart rotors
在目前旋翼桨叶只能采用整体固化形状下,针对各种状态下高度复杂的旋翼非定常流场,国际先进直升机公司在计算空气动力学手段分析支持下,通过大量风洞试验研究,发展了各桨叶展向位置处适用于不同先进直升机能力需求的专用翼型族。目前我国只有强调机动能力的6T级直升机桨叶翼型,2 T级轻型直升机、10 T级通用运输机、13 T级大型运输机等都使用这个翼型,事实上无法达到各型号的最优设计目标。我国迫切需要掌握和建立完整的直升机桨叶翼型族,以此推进后续直升机研发任务的开展。
3.2 智能旋翼技术
随着新材料、变形结构和系统以及智能化控制技术的发展,针对直升机各种典型飞行状态,开展桨叶外形智能变形的控制方法和控制机构技术研究,建立智能旋翼的技术基础,可使直升机桨叶外形从全任务包线能力综合最优的单一外形,发展到各任务状态桨叶外形都对应变化的多外形智能变换,达到提高直升机装备性能的目标[40]。
随着计算机计算能力的提升,未来有望针对不同任务及其对应的不同飞行状态,准确确定桨叶各展向、各方位的理想外形。结合未来快速、准确、长寿命且适用复杂振动环境和狭小空间的智能旋翼桨叶外形控制技术的建立和应用,智能旋翼的目标将发展为桨叶各剖面位置外形实时变化,直升机性能将会进一步提升到极致[41]。
3.3 高速直升机技术
如下所示,旋翼的升力大小随旋翼桨盘面积增大而增大,旋翼下洗流速度随桨盘面积增大而减小。
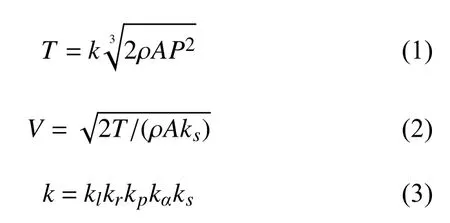
其中,T为旋翼升力,ρ为大气密度,A为桨盘面积,P为旋翼功率,kl为滑流理论应用误差程度,kr为桨盘半径影响因素(随半径减小而降低),kp为桨叶气动先进程度,kɑ为旋翼机使用点与设计点偏差程度,ks为旋翼下洗流机身阻塞影响因素,V为旋翼下洗流速度。
目前国际在役的V-22鱼鹰倾转旋翼机空机重量15 T,海平面悬停重量24 T,在海拔1 600 m处悬停重量21.5 T,同时旋翼下洗流有10级狂风大小,这些技术特征尚无法满足我国高原地区使用要求。综合考虑使用条件、环境、技术等因素,我国高速直升机应该聚焦四旋翼倾转旋翼机。在不增加发动机的情况下,将V-22的双旋翼增加为同样大小的4旋翼,悬停飞行重量将增加6 T,扣除结构及系统增重后的有效载荷可增加3 T,旋翼下洗流速度可降到常规直升机的8级风水平。图10为我国四旋翼倾转旋翼机构想图。

图10 四旋翼倾转旋翼机构型Fig. 10 A tiltrotor configuration of quadrotors
四倾转旋翼机目标包线如图11所示(红色区域),可以满足我国高原地区高速运输等任务的需求。7 000 m的巡航飞行高度可以有效避免直升机在高原峡谷间穿插飞行而必须面对的山谷风切变和雨雾等复杂环境问题。同时,其近地(海)悬停、机动能力不弱于常规直升机,具备复杂高原环境垂直起降、近地机动能力,悬停和近地低速机动时飞行器下洗气流和常规直升机相当,可保证舰面和地面复杂环境中人员正常作业。
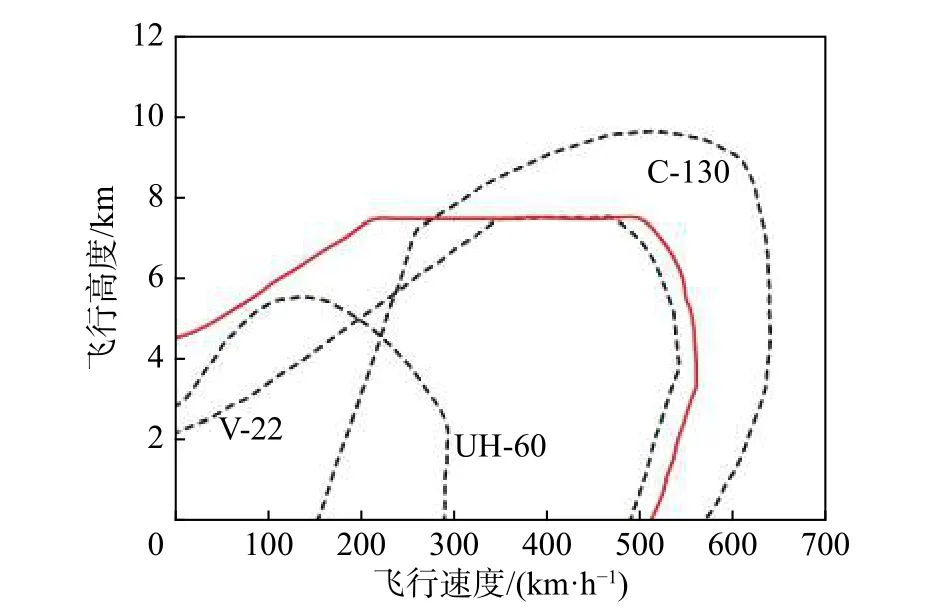
图11 四倾转旋翼机飞行包线Fig. 11 Tiltrotor flight envelopes of quadrotors
表1为典型直升机参数对比分析结果。四倾转旋翼机需解决的各种技术问题:前置旋翼对后置旋翼不可避免会产生严重干扰;旋翼在各种飞行状态和机翼之间存在较强相互气动影响,倾转旋翼机旋翼和机翼之间相互干扰影响其低速机动飞行能力,并对其相应状态飞行控制产生不利影响;倾转旋翼机有多种动力传动模式,各传动模式各有优势和不足;旋翼/短舱/机翼耦合系统在前飞和悬停时的动特性问题复杂,存在“回转颤振”问题。针对上述问题需要研究建立相应的设计理论、方法和技术。
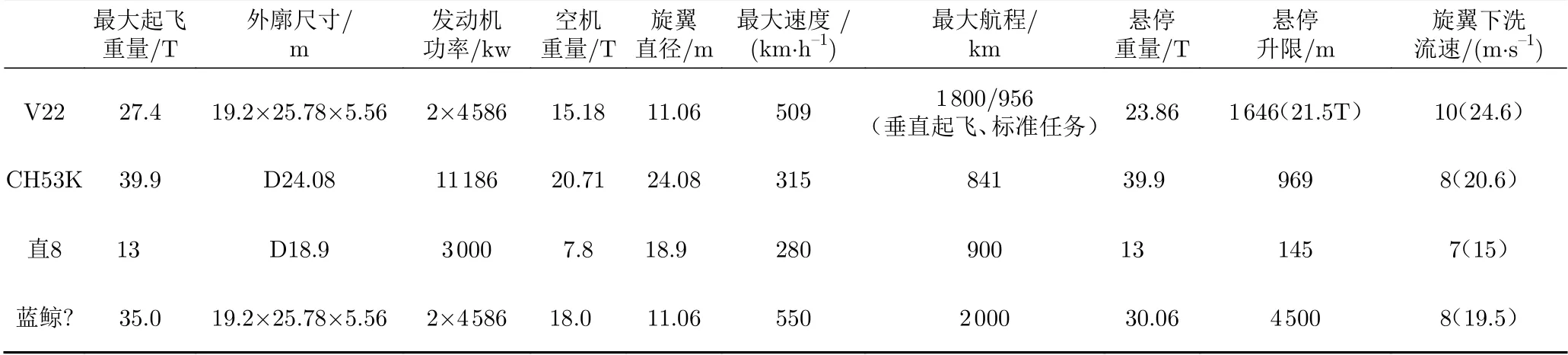
表1 典型直升机参数对比Table 1 A comparison of typical helicopter parameters
此外,针对倾转旋翼机在悬停、低速飞行和飞机飞行模式下的不同需求和技术特点,探索发展智能变形变转速旋翼,实现不同飞行状态下旋翼气动理想构型,是实现倾转旋翼机技术突破的重要方向。
4 结束语
我国地形复杂,高原地区广袤,国外直升机装备缺少相应的针对性研发工作,特别是难于满足我国高原地区的使用需求,因此我国直升机研发必须走独立自主的技术和产品道路。根据直升机技术独特复杂的特性,开展“智能、无人、高速、环保”技术研究是未来直升机的发展方向,而筑牢基础、建立适合我国国情的自主旋翼桨叶翼型族是我国直升机产业发展的根本,适应国情、发展研发特有的四倾转旋翼机是我国直升机未来发展和突破的有效策略。