新型电子驻车鼓式制动器匹配设计与功能验证*
2021-06-22王军年刘轶材马浩凯李争一左记祥
王军年 刘轶材 马浩凯 李争一 左记祥
(吉林大学,汽车仿真与控制国家重点实验室,长春 130025)
主题词:电子驻车制动 鼓式制动器 自锁 强度 MATLAB/Simscape仿真
1 前言
电子驻车制动(Electric Parking Brake,EPB)系统已成为汽车线控制动系统的重要组成部分[1],广泛应用于乘用车中[2]。由于结构的特殊性,目前布置在轮边的电子驻车制动机电系统普遍应用盘式制动器[3]。鼓式制动器制动效能高[4]、成本低、耐用程度高[5],仍广泛应用在经济型轿车、微型客车,以及轻、中型载货汽车中[6]。而随着汽车先进控制系统成本降低,技术逐步下放,此类汽车的安全便利性电控系统的配备需求也越加迫切,因此开发高集成、低成本的鼓式电子驻车制动系统具有很好的工程应用价值。
现有专利技术中涉及的电子驻车鼓式制动机电系统没有布置在轮边,而是选择了成本较低的直接利用电机拖拽拉线实施驻车制动的方案[7]。此方案对制动底板背部的轴向和径向空间尺寸提出了较高要求,并且在使用过程中制动拉线容易出现变形松动,会增加维护成本和驾驶室噪声。另外,还有一些电子驻车鼓式制动器利用丝杠螺母机构直接促动两制动蹄实施电子驻车制动[8]。该促动方式本质上属于不等促动力、等位移的鼓式制动方案,导致制动器制动力不能充分发挥和两蹄片磨损不均,另外,其传动链长,且对于制动底板后方的径向空间和轴向空间都有较高要求。
在分析现有技术优缺点的基础上,本文提出一种机械结构较为简单、便于安装且能够节省有限的径向空间的新型电子驻车鼓式制动器,并根据某A0 级车辆的参数,匹配设计该电子驻车鼓式制动器的传动机构和自锁机构的关键结构参数,并对受力较大的自锁机构进行CAE 强度校核,最后基于MATLAB/Simscape 搭建整车模型,对该系统进行功能验证。
2 电子驻车鼓式制动器工作原理
2.1 结构方案设计
本文所述的新型电子驻车鼓式制动器结构主要由沿轴向依次布置的鼓式制动器、齿轮推杆机构和步进电机减速装置组成[9],如图1 所示。固定在制动器底板背面的步进电机减速装置(图中未示出)主要由行星齿轮减速器、步进电机组成,其通过同轴连接的齿轮推杆机构与鼓式制动器10 连接。鼓式制动器部分由制动鼓、制动轮缸11、回位弹簧12、制动蹄腹板13、制动蹄片15、底板14组成。齿轮推杆机构由传动部分20和自锁部分30组成。传动部分如图1、图2所示,端面带有棘轮的齿轮25与另外2个偏心销齿轮24组成的定轴轮系在运动的过程中带动推杆22,可促动制动器的蹄片张开。自锁部分如图1、图3 所示,该部分各零件依次同轴布置,其中自锁圆筒31 的一端端面带有锯齿状棘爪,另一端面带有一圆形环槽以放置弹簧32,其圆周外侧轴向均布有矩形花键,用于与固连在制动器底板上的导轨套33 的键槽相互配合,以达到导轨只约束其旋转而不影响其沿轴向往复运动的目的。

图3 电子驻车鼓式制动器自锁部分结构

图2 电子驻车鼓式制动器传动部分结构
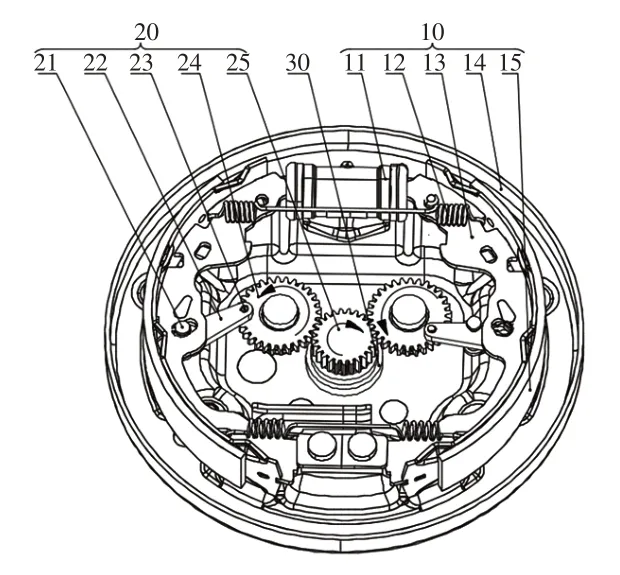
图1 电子驻车鼓式制动器结构
当车辆由正常行驶进入行车制动工况时,鼓式制动器的蹄片在制动器液压轮缸作用下绕各自支点转动至张开,直至与制动鼓接触产生行车制动摩擦力矩。此过程中,由于制动蹄腹板上的弧形孔位设计余量的存在,不会对行车制动的施加与解除产生任何影响。
2.2 系统控制流程
当车辆进入驻车制动工况时,步进电机减速装置通电开始工作,带动齿轮推杆机构传动部分的曲柄连杆机构运动,使2个蹄片逐渐张开并施加一定的压力。当步进电机断电后,自锁圆筒和齿轮上的棘轮在弹簧的弹力作用下相互接触咬合,使得蹄片无法返回初始位置,以此实现断电自锁。
当驾驶员起动车辆,发出解除驻车制动的指令时,固连在导轨内部的电磁铁通电,电磁力克服弹簧的作用力吸引自锁圆筒沿轴向移动到导轨内部的轴肩上,使棘轮棘爪机构克服弹簧弹力分离,此时,鼓式制动器的回位弹簧将蹄片拉回初始位置,从而解除驻车制动。控制流程如图4所示。

图4 电子驻车鼓式制动器控制流程
3 电子驻车鼓式制动器零部件设计
3.1 制动器驻车制动力计算
按照GB 7258—2017《机动车运行安全技术条件》的要求,在空载状态下,驻车制动装置应能保证车辆在坡度为20%,轮胎与路面的附着系数不小于0.7 的坡道上正、反两个方向保持固定不动,时间不小于2 min。本文选用某A0 级轿车数据进行设计,其后轮为鼓式制动器,整车参数如表1所示。

表1 整车参数
如图5所示,汽车在坡道上应长时间保持静平衡,即车辆驻车制动力应不小于汽车自身重力在坡道方向的分力,且一般只有后轮存在驻车制动力,因此,可求得汽车后轮所需驻车制动力Fxb及单侧车轮的制动力矩Ts:

图5 车辆驻车制动受力情况

式中,k为安全因数,由于驻车制动系统的安全性要求,取k=1.5;α为坡度角,根据驻坡法规要求坡度20%,取α=11.3°。
带入表1中的数据,计算得Ts=497 N·m。初选电机额定功率P=2 kW,额定转速n=500 r/min。电机经减速器减速增扭后应达到单侧所需制动力矩,由Ts=9 550Pi/n,计算可得行星齿轮减速器传动比i=13.0。由nout=n/i,可根据计算得到减速器输出转速nout=38.4 r/min。对于鼓式制动器衬片与制动鼓通常预留的0.2 mm制动间隙而言,该转速下制动间隙消除时间约为0.05 s,满足驻车制动0.3~0.5 s的响应时间要求[10]。
3.2 齿轮组的结构参数设计
为保证蹄片可靠张开,且尽量缩小结构尺寸,便于加工,选择圆柱斜齿轮进行齿轮结构设计。该齿轮的作用为使制动蹄片张开,故需要其承受足够的压力并有较长的使用寿命。故齿轮材料选用综合性能较好的40MnB,并采用表面淬火,为硬齿面,选择8 级精度加工。
考虑整套机构位于2个制动蹄内部,因此要求结构较为紧凑,分别取中间齿轮齿数z1=17,两侧齿轮齿数z2=18,螺旋角β=20°。
齿轮为硬齿面,因此按弯曲强度理论进行设计,按式(3)计算初选斜齿轮法面模数mnt:

式中,T1为输入齿轮的名义转矩,由电机额定功率P和减速器输出转速nout确定;Kt为载荷系数,初选Kt=2.0;ψd为齿宽系数,查表后取0.40;Yε为重合度系数,查阅机械设计手册后计算得Yε=0.72;Yβ=0.85 为螺旋角系数;为比较系数,取两齿轮较小值0.012。
初算mnt>4.82,根据齿轮线速度v修正载荷系数,取K=1.87,代入式(4):

计算得最小法面模数mn=4.72,因此取模数mn=5。将齿轮中心距圆整为93 mm,则修正后螺旋角β=19.803 5°。因此可计算得到齿轮分度圆直径d1、d2与宽度b:
综上,取d1=90.3 mm、d2=95.6 mm、b=36.1 mm,齿轮中心距圆整为93 mm,修正后螺旋角β=19.803 5°。该组齿轮可以放入制动蹄片之间,根据齿轮接触强度理论进行校验,接触强度足够,设计合理。
3.3 轴系的结构参数设计
首先进行中间轴的设计,中间轴为传动轴,因此按照扭转强度条件进行设计。由电机额定功率P=2 kW,单侧车轮制动力矩Ts=497 N·m,选择45#钢,经查阅系数C取值范围为107~118,取C=109,故中间轴的最小直径Dlmin为:

考虑到键槽的存在将削弱轴的强度,两端设计直径为:

计算得Dlmin=40.6 mm,中间轴直径D1=41.8 mm。
然后进行固定轴的设计,由于固定轴为转轴,计算轴的受力情况后根据弯扭组合强度理论设计轴的直径。由于齿轮为斜齿轮,除摩擦力外,齿轮啮合时受力在分度圆上分解为相互垂直的3个分力:
式中,αa=20°为分度圆压力角;Ft=11 000.3 N为圆周力;Fr=4 256.3 N 为径向力;Fa=3 961.9 N 为轴向力,并考虑推杆对其受力。
由于推杆为二力杆件,其承受压力Fp与圆周力Ft的关系为:

式中,θ为推杆与齿轮切线的夹角,最大为45°。
计算得推杆最大压力Fpmax=7 780.3 N。根据弯扭组合理论进行设计,并取安全系数S=2,应力折算系数α=1,计算得支撑轴设计直径D2=34.2 mm,为便于滚针轴承的选取,取整后为35 mm。为保证齿轮定位可靠,轴肩尺寸取38 mm。
3.4 自锁机构参数设计及CAE分析
自锁结构的设计关键在于棘轮棘爪处的参数,但由于类似结构没有成型的设计公式,只能根据经验设计。根据其承受力矩为Ts=497 N·m,对于自锁圆筒,预设棘轮机构的最大直径和最小直径分别为Djmax=66 mm和Djmin=35 mm,此时计算棘轮分度圆直径Dj=(Djmax+Djmin)/2=50.5 mm,取齿数zj=29。对于配套端面带棘轮的齿轮结构,考虑到导向平顺性及结构强度,选择导轨数量为6条,整体结构综合考虑使用强度需求和不过分增加簧下质量要求,采用结构钢材料。
由于制动器的自锁结构部分受力复杂,难以进行计算校核,对其部分设计结构进行CAE分析校核。由于在驻车制动过程中,电子驻车鼓式制动器的自锁机构所受载荷为静载荷,并以前文推得的制动力矩为计算的输入条件,对自锁结构各零件进行强度分析。电子驻车鼓式制动器自锁结构及从动齿轮应力分布云图如图6所示。


图6 应力分布云图
由CAE 分析可知:端面有棘爪的齿轮应力集中处为棘爪根部,最大应力40.7 MPa;自锁圆筒应力集中处为其外圆表面、花键与棘爪底部端面3 个面的交点,最大应力184.6 MPa;导轨套受力面为花键槽侧面,最大应力67.9 MPa;偏心销的最大应力分布在其与齿轮配合截面处,最大应力294.8 MPa;推杆的最大应力分布在其与偏心销配合位置,最大应力54.8 MPa。各结构静载应力均小于材料许用应力。综上,零件强度足够,设计可靠。
4 整车应用仿真验证
4.1 整车模型的建立
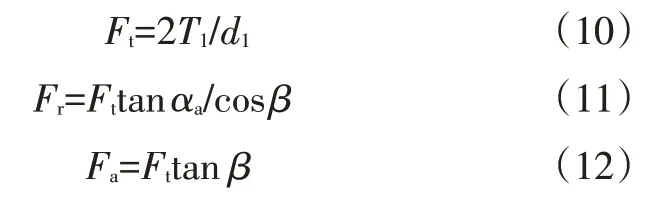
为验证提出的新型电子驻车鼓式制动器的制动性能以及参数匹配的合理性,基于物理系统仿真软件MATLAB/Simscape 搭建A0 级车辆纵向仿真模型,包括动力系统、行车制动系统,并建立含有直流电机、减速器及齿轮传动的电子驻车制动系统,参数与设计值相同。对驻车制动过程进行仿真分析,模型如图7所示。整车模型的关键参数见表1,轮胎采用魔术公式模型,其有效直径为464 mm。
图7 Simscape仿真模型
根据制动法规,在仿真中选择在坡度为20%,路面附着系数为0.75的良好路面上进行驻车制动。预设驻车制动开始前,汽车已通过行车制动机构减速至5 km/h,并且不考虑风速影响。试验中,变速器挡位处于空挡,离合器不接合,并且不进行行车制动,验证驻车制动系统效能。
4.2 仿真结果
在Simscape内置求解器中进行仿真求解,仿真结果如图8 所示,在驻车制动机构内电机作用下,后轮制动力矩迅速达到需求制动力矩,而驻车制动系统不影响前轮,因此前轮制动力矩为零(图中省略)。在电子驻车鼓式制动器的作用下,汽车以5 km/h初速度在0.44 s内迅速停止,制动距离为0.3 m,并在坡度为20%的坡道上稳定完成驻车过程。仿真结果表明,该电子驻车鼓式制动器可以快速动作,产生足够的驻车制动力矩,使车辆平稳实现驻车制动,验证结果有效。

图8 仿真结果
5 结束语
本文提出了一种新型的电子驻车鼓式制动器,基于某A0 级轿车进行关键结构参数的设计,对关键自锁机构进行了CAE 强度校核,最后进行了应用于整车的仿真验证。仿真结果表明,本文提出的电子驻车鼓式制动器方案设计合理,该制动器能满足车辆20%坡道上驻车制动的相关法规要求,且响应迅速、制动可靠。另外,还具有机械结构简单、空间利用率高、安全自锁等优点,可以有效提高采用鼓式制动器的经济型乘用车和轻型商用车的底盘电子化水平。
