网联环境下无信控交叉口行车避碰预警方法*
2021-06-22卢涛王润民赵祥模张心睿汪贵平
卢涛 王润民 赵祥模 张心睿 汪贵平
(1.长安大学,车联网教育部-中国移动联合实验室,西安 710018;2.长安大学,信息工程学院,西安 710064)
主题词:车联网 交叉口 无信控 碰撞预警 渗透率
1 前言
道路交叉口是交通网络的重要节点,也是碰撞事故的多发地[1-3]。无信号控制交叉口车辆事故发生率远高于信控交叉口,因此成为交叉口碰撞消解研究的重要对象。
基于车联网(Vehicle to Everything,V2X)技术构建的预警机制为上述问题提供了新的解决方案,学者对此进行了大量的研究。文献[4]提出了一种交叉口碰撞预警系统(Intersection Collision Warning System,ICWS),将两车碰撞时间(Time to Collision,TTC)差值的绝对值与设置的阈值进行比较,作为触发预警的条件。文献[5]提出的碰撞预警算法(Early Collision Warning Algorithm,ECWA)计算两车接近的最近点,将车辆与接近最近点的距离是否达到阈值作为触发预警的条件。文献[6]在TTC 方法的基础上提出了基于车速的安全预警时间阈值,并进行了仿真验证,结果表明,预警误报率降低了18.34%。文献[7]基于车辆或交通参与者之间的相对位置和距离,引入了基于GPS的交叉口模型和车辆矩形模型,使TTC 的计算更加准确,并可减少非冲突情况下的计算消耗。文献[8]提出了一种基于行驶速度的车辆避撞时间预警计算模型,使预警更加准确。文献[9]基于数字地图和动态车辆模型提出了一种协同碰撞预警系统,提高了碰撞预测的准确性。文献[10]在无信号交叉口场景中使用单个车辆的速度控制引导模型代替了虚拟信号灯方法与车辆交替通行的传统控制方法,从而避免了交叉口碰撞。
上述研究均设定车辆全部为网联车辆,并没有考虑网联车辆和非网联车辆混行的情况,难以保证算法的可靠性,此外,现有避碰预警方法的有效性仍有待提升。因此,本文在构建无信控交叉口的应用场景及选取合适的车辆运动学模型、驾驶员模型和评价指标的基础上,提出一种基于安全距离的避碰预警方法,基于MATLAB平台进行仿真测试,验证其有效性,并针对不同网联车辆渗透率对避碰预警方法的影响进行测试分析。
2 典型无信控交叉口场景构建
本文构建的无信控交叉口场景为十字型无遮蔽双向2 车道交叉口,车道宽4 m,如图1 所示。不区分干路、支路,每个车道具有相同的路权,在无预警的情况下,由驾驶员根据自车与冲突车辆的行驶状态判定自车路权是否优先。仅考虑车辆直行,不考虑转向。假定交叉口内的部分车辆配备V2X网联通信设备和人机交互行车预警系统,同时,具备V2X通信设备的车辆可以通过车车通信(Vehicle to Vehicle,V2V)以固定频率实时、动态交换各自的位置、车长、车宽、速度等信息,具备人机交互行车预警系统的车辆可以根据自车与冲突车辆的行驶状态信息进行交叉口行车冲突判断,并根据判断结果以音视频形式向驾驶员发出警告。
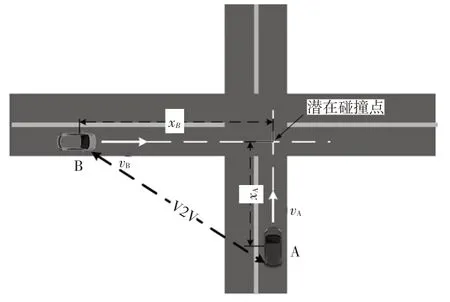
图1 无信控交叉口碰撞预警场景
在图1 所示的无信控交叉口中,假设2 条相互冲突的支路中某时刻同时存在网联车辆A和B,两车分别沿所在车道中线同时驶向交叉口(不考虑换道),碰撞可能发生的位置(潜在碰撞点)为两车直行轨迹在交叉口内的交汇点。
在行驶过程中,两车的行车预警系统根据V2V 通信得到对方车辆的行驶状态信息(行车位置、车辆长度lA、lB与行车速度vA、vB),计算出双方的碰撞时间[11]tTTCA、tTTCB及其差值tTTCd:
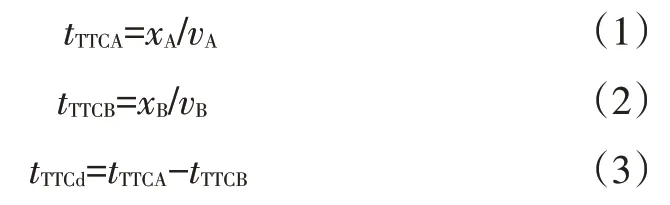
式中,xA、xB分别为车辆A 和车辆B 与交叉口的距离。
然后根据两车车长和行驶速度计算出碰撞时间预警阈值:

若|tTTCd|>tTTCθ,行车预警系统不进行预警,此时驾驶员按照预期的驾驶特性驾驶车辆通过交叉口;若|tTTCd|≤tTTCθ,预警系统选取碰撞时间较长的车辆触发预警。触发预警的车辆计算车辆当前制动至停止的安全距离Ds及其与交叉口的距离Di,并得到两者的比值R:

然后,根据R值与设定的阈值判定预警的级别。当驾驶员收到二级预警时,其采取强制动措施,收到一级预警时,采取弱制动措施,以此实现避碰。若R超过设定的最大分级预警阈值,则不进行预警。
3 车辆运动及驾驶员行为模型建立
本文构建的场景中车辆均为网联车辆,为了更好地描述车辆的行为以及后序仿真测试的进行,需建立合适的车辆运动学模型和驾驶员行为模型。
3.1 车辆运动学模型
车辆运动学模型采用非线性运动学模型[12],其中加速度采用分段模型:第1 个阶段为制动器响应延迟阶段,车辆保持当前加速度;第2 个阶段为加速度线性变化阶段,车辆加速度线性减小;第3 个阶段为车辆达到预期加速度阶段,车辆开始匀减速。仿真过程中,车辆位置、速度和加速度变化规律分别为:


式中,x(k)、v(k)、a(k)分别为k时刻车辆的位置、速度、加速度;Δt为仿真步长;td=0.3 s[12]为制动器响应的纯延迟,一般取为0.2~0.9 s;kb=18.5 m/s3[12]为车辆的加加速度;ades为减速度的期望值。
3.2 驾驶员行为模型
本文假设驾驶员在未收到预警信息的情况下保持预设驾驶特性行驶,收到预警信息后,根据不同的预警级别做出相应的反应。
对于非网联车辆,在不受道路竞争和冲突的影响时,驾驶员以预期速度通过交叉口;当判断存在冲突时,驾驶员只有在能看到冲突车辆且TTC 不超过2 s[13]时进行优先权判断,当判断结果为不优先时,驾驶员采取动作点(Action Point,AP)制动[14],否则,均按照预期速度行驶。
对于网联车辆,驾驶员模型采用保守型,在未收到预警信息的情况下,保持预设驾驶特性行驶;当出现预警信号时,驾驶员根据预警后的制动特性进行制动,即根据不同的预警级别准确作出相应的反应。
3.2.1 预期驾驶特性
文献[15]采集并分析了45 名驾驶员在无信号灯交叉路口的试验数据,结果表明,中国驾驶员在距离交叉路口200 m 左右开始轻微减速,距离交叉路口60 m 左右才有明显的减速,直至进入交叉路口时将速度降到12 m/s左右。基于上述研究结果,本文将两车驾驶员预期驾驶特性设定为匀速-匀减速-匀速直线运动。
行驶过程中,当驾驶员观察到有冲突车辆驶向交叉口时,不会立即采取减速措施,而是通过判断自车在交叉口是否具有优先权来确定是否减速。若具有优先权,则正常行驶;反之,则减速让行。Lu 等[13]总结出了十字交叉口左车和右车驾驶员的优先概率模型,当优先度概率不小于0.5时,认为自车优先,反之认为自车不优先。在TTC 小于2 s 时,左、右车辆驾驶员的优先度概率PL、PR分别为:
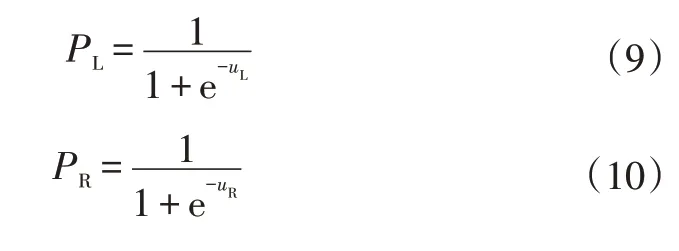
其中:

式中,uL、uR分别为左、右车驾驶员优先度概率的影响因子;dl、dr分别为左、右车与碰撞点的距离;dlr为两车之间的直线距离;ddif为dr和dl的差值;vr、vdif分别为右车的速度和两车速度矢量和的模长;tr=dr/vr为右车到达碰撞点所用的时间。
3.2.3 AP制动
当驾驶员判断自车不具有优先权后,会采取AP 制动。本文采用Wang[14]等人提出的AP制动模型:

式中,aAP为车辆减速的制动加速度;tTTI为车辆到达交叉口的时间;amax为车辆的最大制动减速度。
3.2.4 预警后制动特性
闻一多研究唐诗,用清代朴学的方法,在考据方面下了极大的功夫。以1930年青岛时代为分界线,此前是在“故纸堆内讨生活”的预备时代,此后才“渐渐上题”。
为了保持预警分级的优越性,又不因分级过多而削弱驾驶员的注意力,进而降低预警算法的效果,本文采用2级预警机制。采用文献[16]提出的舒适制动减速度acomf的概念,其与车速v有关:

当一级预警信号出现后,驾驶员采取的制动减速度为max(acomf-2,anow),anow为车辆当前的加速度;出现二级预警信号时,驾驶员采用的制动减速度为amax。
4 基于安全距离的避碰预警方法
基于上述模型,本文在ICWS 的基础上进行改进,提出一种基于安全距离的避碰预警方法(Collision Avoidance Warning Algorithm,CAWA)。
首先根据TTC 差值的绝对值是否达到阈值决定是否预警,然后根据R值决定采取预警的等级,当满足预警条件后仅选取一辆合适的车辆进行预警。其中涉及预警机制、预警触发条件和预警时机。
在预警机制方面,应避免出现两车同时预警的情况。当某时刻两车中只有一车预警时,CAWA不对预警信号进行干预,使其正常触发,提醒驾驶员制动减速;当某时刻两车同时预警时,CAWA 对预警信号进行干预,仅对不优先的车辆预警。基于上述机制,CAWA在避免交叉口车辆碰撞的同时,实现车辆协同通行,提升交叉口通行效率。
对于预警触发条件,ICWS 所选预警触发阈值为固定值,未能充分考虑车辆几何形状与动态行驶特性,因此本文采用动态阈值,设计预警触发条件ε[17]:

在分级预警时机方面,通过比较车辆与交叉口的距离和计算出的安全距离d的大小,来实现不同的预警级别。d的计算方式分为3 个阶段[18]。第1 个阶段时长为t1,包含驾驶员反应阶段和制动系统滞后阶段,在该阶段认为车辆为匀速行驶。第2 个阶段时长为t2,为制动压力升高阶段,在该阶段制动减速度线性增加。第3个阶段时长为t3,为制动持续阶段,在该阶段车辆达到预期减速度,并保持不变。
在第1 个阶段,车辆的速度v0保持不变,行驶的距离s1为:

在第2个阶段,车辆的制动减速度按照kb(18.5 m/s3)的斜率线性增大,则速度随时间的变化为:

该阶段车辆行驶的距离s2为:

在第3个阶段,车辆达到预期制动减速度ades,开始做匀减速直线运动,s3为假设车辆速度减为0 的过程中行驶的距离:

最终得到车辆从预警开始到采取制动措施后车辆行驶的安全距离为:

设当前车辆与交叉口的距离为d1,车辆采用全力制动至停止的距离为d2。当1.1≤d1/d2<1.6 时,触发一级预警;d1/d2<1.1时,触发二级预警。
5 仿真平台搭建与测试方案设计
5.1 仿真平台结构
本文利用MATLAB搭建仿真平台,仿真框架如图2所示,包含参数初始化模块、车辆运动学模型、驾驶员模型、通信模块和数据分析模块。
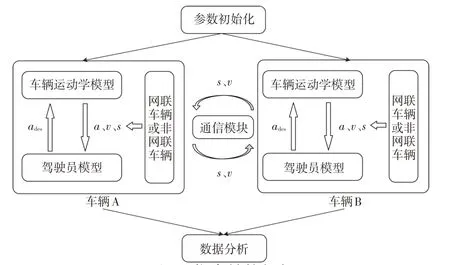
图2 仿真结构框架
仿真开始时,随机生成状态变量的初始值,包含车辆的位置、速度、质量、驾驶员特性等信息。车辆运动学模型和驾驶员模型获得参数的初始值后,共同决定仿真过程中车辆每一时刻的状态。车辆运动学模型控制车辆位置、速度和加速度的变化过程,驾驶员模型通过向车辆运动学模型提供预期加速度来控制车辆的行驶。仿真过程中,若车辆为网联车辆,则通过通信模块分享自身的位置和速度信息,并获取其他车辆的信息;若车辆为非网联车辆,则不分享也不获得信息。数据分析模块在仿真过程中收集每一时刻车辆的信息,最后生成可视化结果。
表1 列出了仿真过程中车辆的部分参数以及车辆运动的预期驾驶特性,包含车辆的质量、长度、宽度和最大制动减速度等,其中U(a,b)表示服从均匀分布,m为质量。若车辆的初始速度小于进入交叉口的速度,则全程以初始速度匀速行驶。表2 列出了行驶过程中驾驶员视野与速度之间的关系[19]。
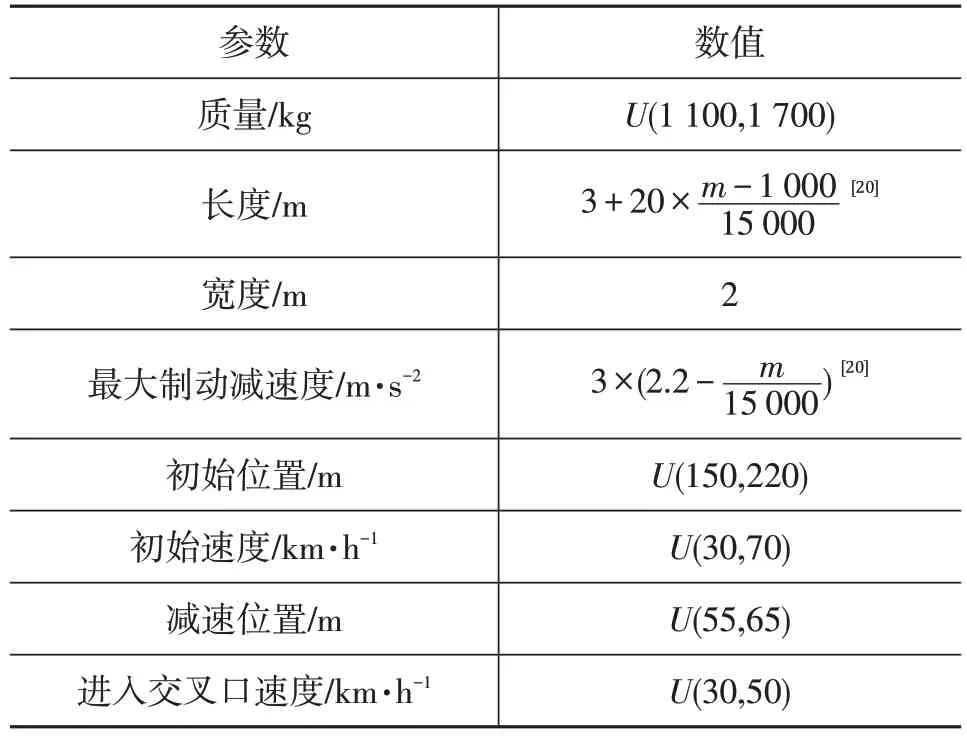
表1 仿真车辆参数

表2 不同车速下驾驶员的视野
5.2 评价指标选取
本文选取平均旅行时间、平均制动至停止比例、平均碰撞比例和平均碰撞相对动能作为评价方法有效性的指标。未发生碰撞时,评价指标为平均旅行时间、平均制动至停止比例和平均制动减速度;已发生碰撞时,评价指标为平均碰撞比例和平均碰撞相对动能。
平均旅行时间反映交叉口通行效率,平均制动至停止比例反映驾驶员的舒适程度,平均最大制动减速度反映已消解的潜在碰撞的严重程度,平均碰撞比例反映碰撞预警方法的有效性,平均碰撞相对动能反映碰撞的严重程度。平均碰撞相对动能E计算公式为:

式中,m1和m2分别为车辆1和车辆2的质量;v1和v2分别为车辆1和车辆2的速度。
5.3 测试方案设计
测试包含有效性测试和可靠性测试,有效性测试即对本文提出的CAWA 方法对避免碰撞的比例的影响进行测试;可靠性测试即对不同网联车辆渗透率对CAWA方法的影响进行测试。在测试过程中假设车辆通信网络不存在时延与丢包,因为渗透率属于宏观概念,本文通过多次仿真模拟渗透率,使仿真结果具有统计学意义。
5.3.1 有效性测试方案
设定测试过程中所有的车辆均为网联车辆。一次完整的仿真过程从参数随机初始化开始,到两车通过交叉口或者发生碰撞结束。将车辆的初始速度分别设置为30~40 km/h、40~50 km/h、50~60 km/h 和60~70 km/h,对ICWS、ECWA 和CAWA 3种方法分别进行1 000次仿真,统计仿真过程中每种方法的平均旅行时间、制动至停止比例、碰撞比例和平均碰撞相对动能。
5.3.2 可靠性测试方案
为探究不同网联车辆渗透率对预警方法可靠性的影响,根据控制变量理论,在每次仿真中,除渗透率变化外,其余的仿真条件均相同。
一次完整的仿真过程从随机初始化参数开始,到两车通过交叉口或者发生碰撞结束。仿真分别在0%、20%、40%、60%、80%和100%网联车辆的渗透率下进行,针对每一渗透率分别进行1 000次仿真,并统计车辆的平均旅行时间、平均最大制动减速度、平均碰撞比例和平均碰撞相对动能。
6 测试结果分析
6.1 有效性分析
有效性测试结果如图3所示,在不同的行驶速度约束下,与ICWS 和ECWA 相比,CAWA 方法在平均旅行时间、平均制动至停止比例和平均碰撞比例方面都更加优异。随着初始速度的增大,ICWS 和ECWA 的平均制动至停止比例也逐渐增加,CAWA方法的平均制动至停止比例则一直为0,可以认为CAWA方法提升了乘员的舒适性。在相同初始速度下,CAWA 的平均旅行时间、平均制动至停止比例和平均碰撞比例均为最低,总体平均旅行时间相比ICWS缩短了1 s,总体平均碰撞比例为0,远小于ICWS和ECWA。
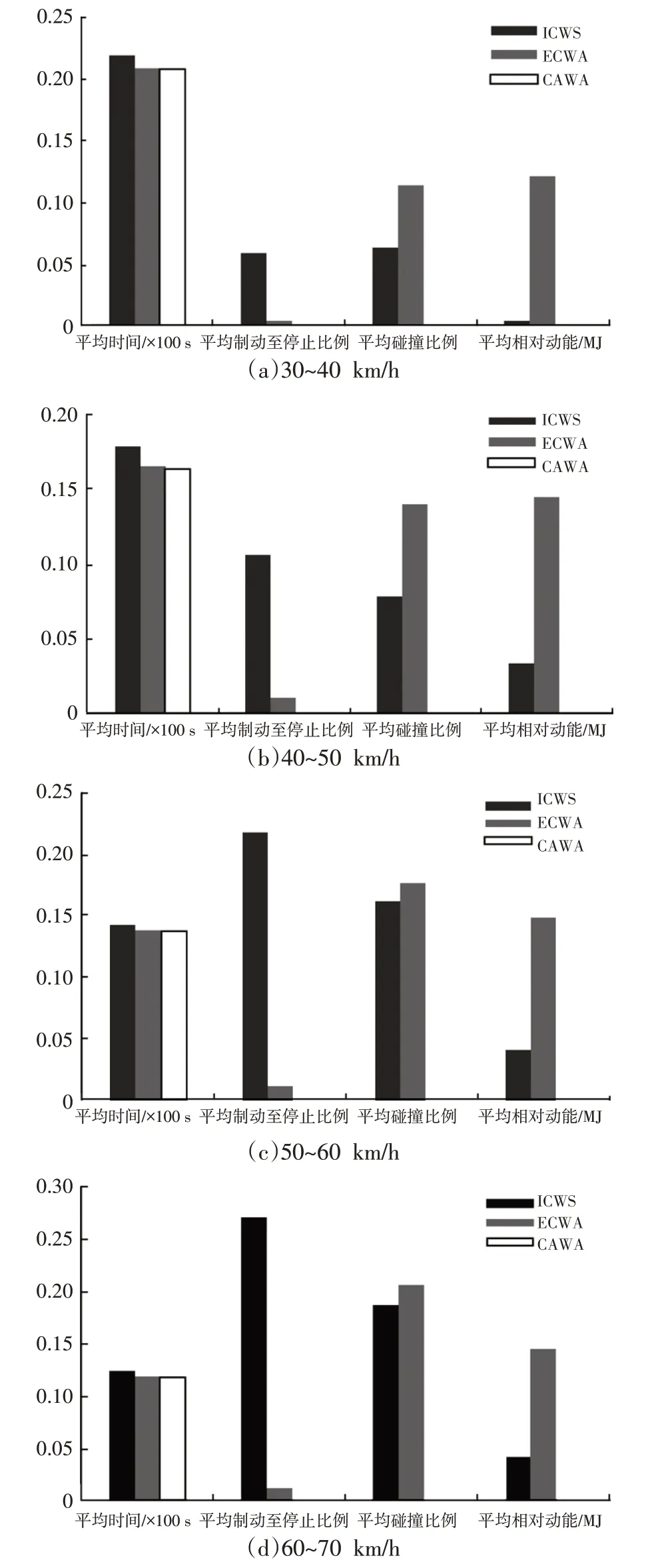
图3 不同初始速度下3种预警方法的对比
总体上,CAWA 在保证安全性的前提下,也提高了交叉口的通行效率和乘员的舒适性。因此可以认为本文提出的避碰预警方法效果显著。
6.2 可靠性分析
可靠性测试结果如图4所示,网联车辆的渗透率越高,方法产生的效果越好。当渗透率达到60%时,平均碰撞比例仅为3.4%,降低了64%,平均碰撞相对动能下降了51%,平均旅行时间下降幅度占渗透率为1时下降幅度的59.5%,平均最大制动减速度仅增加了16%。因此可以认为当网联车辆渗透率达到60%及以上时,本文提出的避碰预警方法是可靠的。

图4 网联车辆渗透率对方法有效性的影响
平均最大制动减速度增大的原因可以认为是由于网联车辆渗透率的增加,使得参与预警制动的车辆增加,且一般驾驶员接收到预警信号后,会采取较大的制动减速度,所以平均最大制动减速度会略有上升,但仅上升了6.2%。虽然平均最大制动减速度有所增加,但是平均旅行时间下降,通行效率有所提高,可以认为是由于一车预警制动后,促使两车驾驶员对交叉口优先权的判断更加清晰,不预警的车辆可以按照预期的驾驶特性通过交叉口,所用时间更短。平均碰撞比例和平均碰撞相对动能随着渗透率的增加逐步减小,尤其是平均碰撞比例,100%网联车渗透率下,平均碰撞比例降为0,说明V2X 网联通信设备的网联车辆越多,交通的安全性越高。网联车辆渗透率在10%至20%之间时,车辆的碰撞比例和碰撞相对动能下降不明显,其原因是预警方法正常发挥的场景中两车都为网联车辆,在渗透率较低的情况,很容易出现只有一辆网联车的情况,导致预警方法无法发挥效果。
7 结束语
本文将无信控交叉口行车冲突消解作为研究对象,通过建立车辆运动学模型和驾驶员模型,提出了一种基于安全距离的避碰预警方法,并通过MATLAB 仿真测试,验证了方法的有效性与不同渗透率下的可靠性。测试结果表明,相比交叉口碰撞预警系统和碰撞预警算法,本文提出的方法更加有效,在V2X网联通信设备渗透率达到60%时,有较好的效果。
通过本文的研究结果可以认为,虽然目前因为自动驾驶汽车的安全、伦理等问题,仍无法在社会中进行对其进行大规模市场应用以提高交通效率与交通安全性,但通过在车辆中安装部署具备V2V通信能力的人机交互行车预警系统来实现上述目标是可行的。为突出研究目标,本文的研究认为V2X 通信环境中不存在通信损失,但实际的通信环境中并非理想条件,极易受树木、建筑等的影响,因此下一步应重点围绕非理想通信对避碰预警算法的影响与优化进行研究。
