电驱动桥关键技术综述*
2021-06-22王建华黄剑飞靳迪
王建华 黄剑飞 靳迪
(吉林大学,长春 130022)
主题词:电动汽车 电驱动桥 轻量化 多挡化 智能化 集成化
1 前言
电驱动桥是针对电动汽车设计的一种机电一体化驱动系统,具有集成化程度高、体积小、能耗低等优点[1]。作为电动汽车的核心部件,其性能直接影响电动汽车的动力性和经济性。
电驱动桥可分为集中式电驱动桥和分布式电驱动桥。集中式电驱动桥结构复杂,但具有成本低、对传动系统设计影响较小以及开发难度低的优点。分布式电驱动桥具有结构简单、质量轻以及效率高的优点[2],但差速控制困难、非簧载质量大[3-4]。
电驱动桥主要由电机、逆变器、变速器组成。由于在转矩密度、功率密度以及效率等方面具有显著优势,永磁同步电机已逐渐成为车用电机的主流[5]。为进一步减小电驱动桥的体积和质量,新一代电驱动桥大多将电力电子元件集成到逆变器上。单挡变速器和多挡变速器各有优缺点,但随着电驱动桥技术的发展,多挡电驱动桥逐渐成为了研究的热点。
本文将对电驱动桥关键技术进行综述,并在此基础上总结得出电驱动桥的发展方向。
2 电驱动桥关键技术
电驱动桥性能主要受到3 个方面的影响:第一,电驱动桥动力传递路径及分配方式随着构型的不同而改变,从而影响电驱动桥的输出;第二,电驱动桥结构会影响其自身的质量、体积,进而影响其性能;第三,电驱动桥控制策略影响其各部件的协同工作。
2.1 多挡化构型
目前,电驱动桥通常配备单速变速器,以最大限度降低成本、体积,减轻质量并提高其适配性。
相比于单挡变速器无法兼顾车辆起步时的转矩和速度,多挡变速器可以通过低挡位提供大扭矩,高挡位提高车辆的速度达到起步扭矩与车速的兼容,并能够降低电机的体积、质量和转速。在电池技术短时间内难以取得重大突破的情况下[6],通过提高效率增加电动汽车的续航里程就显得尤为重要。在日常驾驶条件下,采用单挡变速器的电机实际效率与最高效率仍然存在一定差距[7-8]。而采用多挡变速器可以通过制定合适的智能换挡控制策略使电机更多地工作在高效区间,从而降低能耗,提高电动汽车的经济性,增加续航里程。多挡变速器不仅能够降低电机的体积与质量,而且在动力性和经济性方面也更加适合电动汽车[9],因此多挡化是电驱动桥未来发展的趋势之一。表1 显示了单挡变速器与多挡变速器的对比结果。图1 所示为某公司推出的一款16 t载货汽车多挡电驱动桥结构,该电驱动桥将永磁同步电机、两挡变速器以及涵盖所有控制功能的逆变器集成在车桥的中心部位。

表1 单挡变速器与多挡变速器优缺点对比

图1 某公司多挡电驱动桥结构[10]
电动汽车多挡自动变速器包括机械式自动变速器(AMT)、双离合变速器(DCT)、液力自动变速器(AT)、无级变速器(CVT)以及针对电动汽车开发的新型变速器。其中,CVT的应用相对较少[11]。图2显示了不同电动汽车多挡变速器在成本、效率、转矩能力、换挡质量以及体积和质量上的差异。图3所示为4种变速器结构示意。
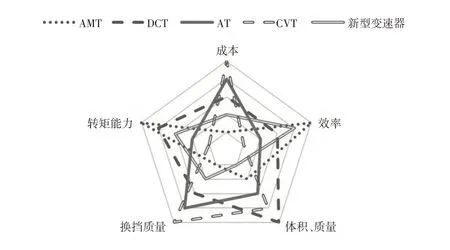
图2 不同电动汽车变速器性能比较[12]
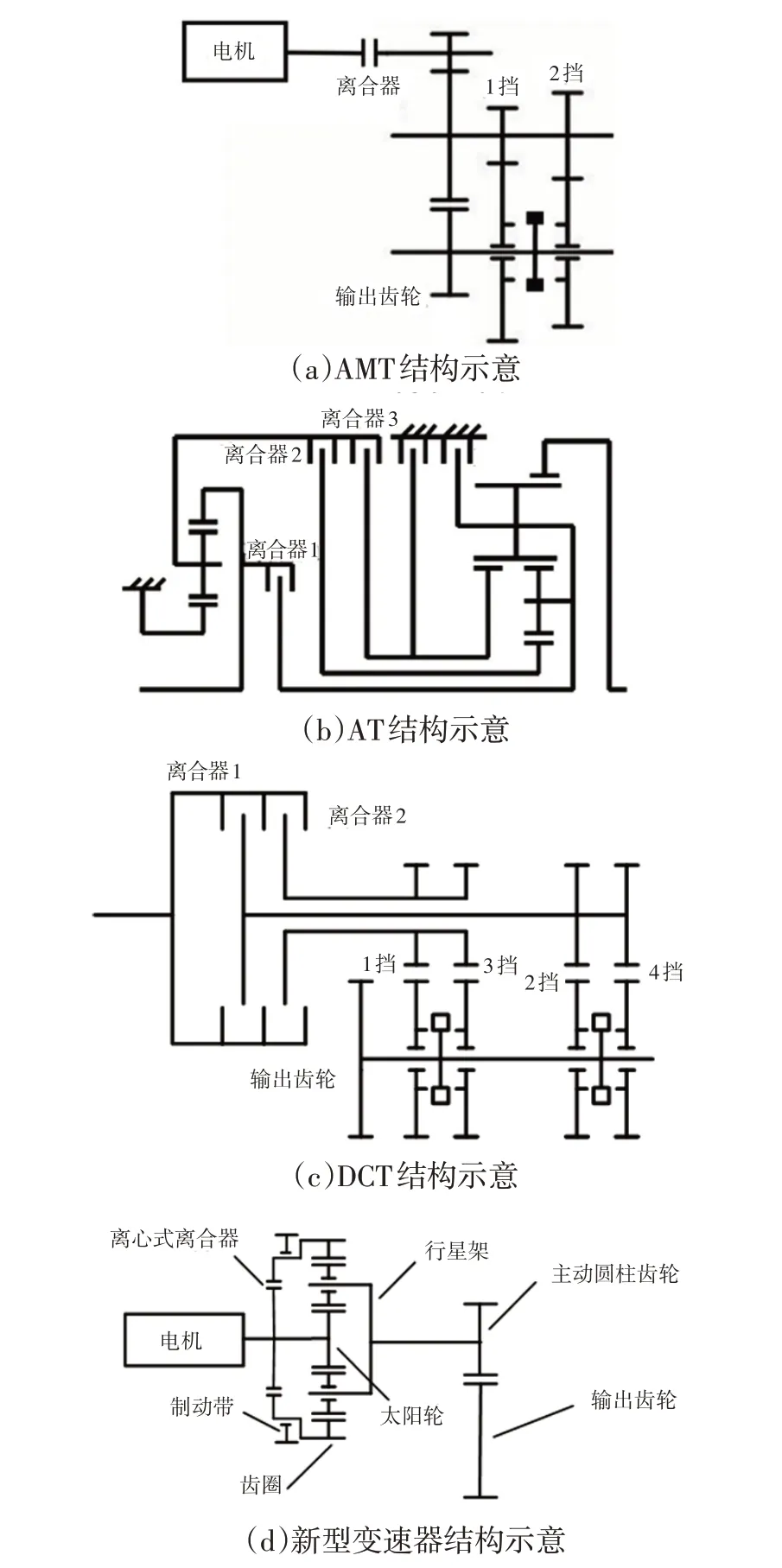
图3 不同变速器结构对比
AMT在效率、质量和制造成本上优势显著,在电动汽车上得到了广泛应用[13],但其存在换挡冲击[14]且控制参数多。DCT 综合了机械式高效与液力变矩器式无动力中断的优点,是一类传动效率高、换挡冲击低且换挡无动力中断的变速器。AT通过控制离合器完成换挡[15],换挡过程中无动力中断,换挡质量极高,但换挡效率低。
针对电动汽车,许多研究者开发了新型变速器。FANG 等[16]针对电动汽车提出了一种由1 对行星齿轮、1个离心式离合器以及1个制动带组成的双速无动力中断机械变速器,见图3d。齿圈在第1 挡时由制动带固定,离合器离心块受离合器系统内部弹簧的作用,与离合器从动件无接触,不产生摩擦力矩。此时,电机产生的动力依次由行星齿轮太阳轮、行星架输出,从而使变速器传动比大于1。离心式离合器在其离合器蹄片转速达到规定值后开始啮合,在第2 挡时松开制动带,此时,行星齿轮太阳轮与齿圈具有相同的转速,从而使变速器的传动比变为1。
在上述4 种变速器中:AMT 效率最高且价格最低,但换挡质量最差;AT 换挡质量最好,但价格昂贵、效率低;DCT除体积和质量大外,其他性能均良好;新型变速器在各性能间取得了平衡。
2.2 轻量化与集成化结构
电驱动桥结构的相关研究主要集中在轻量化和集成化方面,以减小质量和体积。
2.2.1 轻量化
目前,电驱动桥轻量化技术主要可分为结构优化设计、轻量化材料的应用以及先进的轻量化制造工艺。
在电驱动桥轻量化结构设计方面,目前主要通过现代设计理论来设计电驱动桥各零部件的结构,以最大限度地减轻质量。Songlin等[17]根据材料的低载强化特性并结合疲劳强度设计,使材料的强度潜力得到最大限度发挥,从而实现车辆传动轴和前桥的轻量化。Lowrie 等[18]将实心轴改为空心轴,并利用载荷映射建立有限元模型对提出的轻量化设计方案进行分析评价。Tong等[19]利用基于可靠性的零件轻量化设计方法对铝合金轮毂进行设计,使轮毂质量减轻10%。Ide等[20]讨论了用结构优化方法设计轻量化结构和在接触约束下使应力最小化的设计方法。Schaeffler公司[21]开发了如图4所示的2种比传统锥齿轮差速器更加紧凑、轻便的圆柱齿轮差速器,该差速器的圆柱齿轮在一个平面上以行星齿轮对排列,能够更好地实现集成功能,从而减小电驱动桥的质量和体积。林利红等[22]提出了一种由电机、二级减速器、差速器和半轴组成的新型纯电动汽车同轴一体化电驱动桥结构,并建立了驱动后桥桥壳轻量化模型,利用目标驱动方法构建了响应曲面关系,对优化模型进行了求解,使桥壳质量减轻了8.4%。该电驱动桥的电机输出轴通过花键带动减速器的输入轴旋转,经两级齿轮减速后将动力传递给差速器,而半轴穿过空心电机轴插入差速器,最后动力经半轴输出到车轮。

图4 2种圆柱齿轮差速器结构[21]
采用轻量化材料是既保证行驶安全性又能减轻车身质量的重要手段。目前,汽车轻量化材料主要有高强度材料和轻质材料。牛湛滔[23]采用铝合金材料替代主减速器壳的铸铁材料,从而达到轻量化的目的。Juraeva 等[24]采用基础材料与增强材料混合的方法开发了一种轻质、高刚度的塑料复合材料,以代替减速器壳体中的铝。Ferreira 等[25]以纳米金刚石(Nano-Diamond,ND)作为增强材料,提高了零部件材料中铝的屈服应力和极限抗拉强度,从而可减轻车辆零部件的质量。
除以上两点外,根据电驱动桥材料及结构采用包括摩擦焊接、强烈淬火、超声冲击处理等[26-29]轻量化工艺可减轻电驱动桥零部件质量。
综上,目前结构优化设计多通过使电驱动桥零件薄壁化、中空化、小型化和复合化减轻电驱动桥质量,轻量化材料主要包括高强度钢、铝合金、镁合金和碳纤维增强复合材料。目前,相较于结构优化设计,采用轻量化材料更受欢迎,其潜力巨大,但成本相对较高。
2.2.2 集成化
通过电驱动桥中各零部件的集成,可有效减少零部件数量,从而提高电驱动桥的通用性和传动效率。目前集成化在电驱动桥中应用的主要问题是对电驱动桥的散热以及零部件的开发提出了更高要求,且在一定程度上导致零部件可靠性降低、维修难度提高。HU等[30]为提高电动汽车传动系统的性能和集成度,将2组电机绕组分别通过逆变器与超级电容和电池连接,使双三相永磁同步电机驱动系统不需要附加的DC/DC 变换器。Huang等[31]设计了一个集成的散热结构,将热量有效地从电机壳体内转移到外部热交换器。Montonen等[32]将永磁同步电机与行星齿轮、电机冷却和润滑系统集成在一起并对集成系统的冷却性能进行了验证。Sinkko 等[33]提出了一种集成永磁同步电机和两级行星齿轮的新型结构,如图5 所示,电机转子采用空心结构从而为行星齿轮的安装提供了空间。此外,该结构还可通过控制离合器使转矩有2 种不同传递方式,从而具有不同的传动比,一种是当齿圈固定时电机转矩从太阳轮输入,行星架输出,另一种是将输入轴与输出轴直接相连。
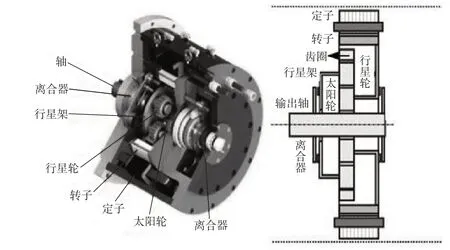
图5 电机与行星齿轮集成结构[32]
刘志强等[34]发明了一种车用集成电机的逆变器总成,由带冷却的逆变器壳体和厚铜印制电路板(Printed Circuit Board,PCB)总成构成,可实现结构的集成化。该逆变器总成利用厚铜PCB 总成实现了功率主回路、驱动和控制电路以及电流传感器的一体化集成和多层部件的设计,结构高度集成,轴向和径向空间更加紧凑。Yang 等[35]提出了一种新型的具有双转子电机的集成化传动系统,可通过控制锁止器、离合器的开合以及转子的锁定实现4 种不同的传动比。采用双转子的传动系统在提升集成化程度的同时,也减少了电机驱动线束。
在产品集成化方面,目前有“二合一方案”“三合一方案”和“多合一方案”。二合一的电驱动桥是将电机与减速器集成为一体;三合一的电驱动桥是将逆变器、电机和减速器集成为一体;多合一的电驱动桥是在三合一电驱动桥的基础上再集成整车的充放电及控制等功能。
总而言之,电驱动桥将从二合一方案,发展到三合一方案,并走向多合一的集成化方向发展,从而进一步减少零部件数量和接口,以节约成本。
2.3 智能换挡
多挡变速器不仅可以减小电机和电机控制器的尺寸,提升车辆的起步加速能力,还能提高车辆的最高速度,拓宽驱动电机的高效区间[36]。智能换挡不仅能更好地适应环境和参数的改变,具有更强的鲁棒性,还能够考虑驾驶员意图。智能换挡作为多挡变速器的关键技术将直接影响车辆的驾驶性能[37],可根据控制策略优化目标数量分为单目标控制和多目标控制。
2.3.1 单目标优化控制
单目标优化换挡控制策略主要从换挡舒适性、经济性、动力性以及制动时能量回收率中选择其一作为目标,以最大限度地提升某一性能。单目标优化换挡控制策略计算量小,容易实现,针对不同变速器应采取具有不同优化目标的单目标优化换挡控制策略,比如针对AT应提升效率,而针对AMT应提升换挡质量。但单目标优化的换挡控制策略只能针对某单一性能进行优化而不能使车辆整体性能最优化。
Lin等[38]为了提高系统的稳定性,采用自抗扰控制,并引入时间优化方法对自抗扰控制的动态响应进行优化,提升了换挡过程中的动力性。Shen 和Hu 等[39-40]基于动态规划(Dynamic Programming,DP)算法提出了混合动力汽车和电动客车的AMT换挡优化方法,利用DP方法从获得的最优换挡点中提取出适用于实车的换挡方案,并结合中国典型城市驾驶循环的工程经验进行优化,提高了能量利用率。Zhu 等[41]根据驱动电动机的效率特性,获得了电动车两速AT 的经济性换挡曲线。Li 等[42]对混合动力汽车再生制动过程中AMT 的降挡进行分析,分别提出了基于规则和DP算法的降挡策略,提高了再生制动的能量回收率。Shen 等[43]采用自组织映射和K-Means 聚类算法构建了插电式混合动力通勤车辆典型循环工况,并利用改进的DP方法,提出了具有最佳经济性的AT自适应换挡策略。
Chen等[44]在AT升挡的转矩阶段和惯性阶段对电机转矩进行控制,使变速器的输出转矩恒定,实现无动力中断换挡,提高了换挡舒适性,AT 升挡控制过程如图6所示。在转矩阶段,离合器2(C2)加大压紧力,离合器1(C1)减小压紧力,而电机相应地增加其转矩以保持输出转矩恒定。此时,C2传递的实际转矩逐渐增大,C1传递的实际转矩逐渐减小。转矩阶段结束时,C2 传递所有转矩,C1 与C2 间的转矩分配结束,之后进入惯性阶段。在惯性阶段保持C2 的压紧力,将电机转矩降低到一定水平,直到电机转速降至2挡时的目标转速。由于C2处于滑摩状态,且提供了其最大转矩,所以即使电机转矩降低,输出转矩仍保持不变。电机转速接近2挡目标转速时,C2的状态从打滑变为粘滞,C2不能提供其最大转矩,因此在惯性相位结束前,需恢复电机转矩以保持输出转矩水平。该控制策略在恶劣工况下效果并不理想,因此增加了一个辅助电机提高换挡质量。
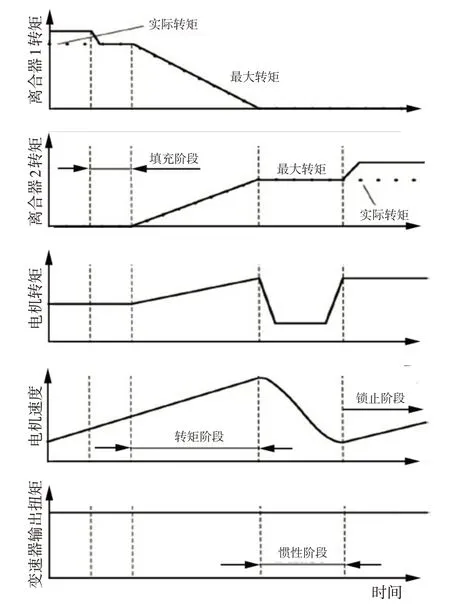
图6 AT升挡控制过程[44]
Yang 等[45]提出了一种由行星齿轮组构成的双输入不间断多速变速器,并制定了基于PI 控制器的实时控制策略,从而优化了电动车辆的经济性,但却忽略了换挡时间对驾驶性能的影响。顾强等[46]提出了基于粒子群优化算法的纯电动汽车动力电机参与下的DCT升挡过程的协调控制方法,以改善换挡品质为目标,对升挡过程中电机转矩、离合器转矩轨迹曲线进行优化。
2.3.2 多目标优化控制
多目标优化换挡控制策略可对换挡过程中多个相互依赖的目标进行控制,使变速器换挡过程具有最佳性能。该策略主要从换挡舒适性、经济性、动力性以及制动时能量回收率中选择多个作为优化目标,以提升车辆的整体性能。但多目标控制计算量大,设计难度高。
He 等[47]提出了一种基于模糊逻辑控制器和控制原理的AMT 动态修正换挡方案,可有效提升换挡的动力性能及能源利用率。Zhao 等[48]建立了基于分层隐马尔可夫模型和自适应神经模糊推理系统的制动意图识别模型,并提出了制动过程中AMT的换挡策略,提高了重型商用车制动安全性和制动能量回收效率。Gao等[49]研究了一种将干式离合器置于变速器后部的新型AMT及其换挡控制策略,通过在转矩阶段采用前馈控制对电机输出转矩进行控制和通过离合器的转矩进行控制及在惯性阶段采用PID控制器对牵引电机进行控制,达到输出恒定转矩的目的,提高了换挡动力性和经济性。
李阳等[50]对电动汽车两挡AMT 换挡过程和换挡品质的影响因素进行了分析,提出了冲击度约束下驱动电机清除转矩和恢复转矩的控制方法、驱动电机“重叠同步调速”控制方法以及换挡电机三闭环分段控制方法,从而提升了换挡过程中的动力性及舒适性。Wu等[51]开发了一种纯电动汽车双输入无离合器传动系统,通过利用辅助电机进行转矩补偿达到无动力中断换挡,并针对过度换挡问题提出了换挡控制策略,为了平衡换挡和能量消耗,采用多目标优化算法确定换挡稳定器的最优系数,从而提高了舒适性和能源利用率。
Fang 等[16]以提高换挡过程中能源利用率及动力性为目标,提出了一种由1对行星齿轮、1个离心式离合器以及1个制动带组成的双速无动力中断机械变速器,并根据基于模糊逻辑控制器所识别的驾驶员意图以及最优控制算法制定了如图7 所示的换挡策略。在此换挡策略中将换挡过程分为转矩阶段和惯性阶段。
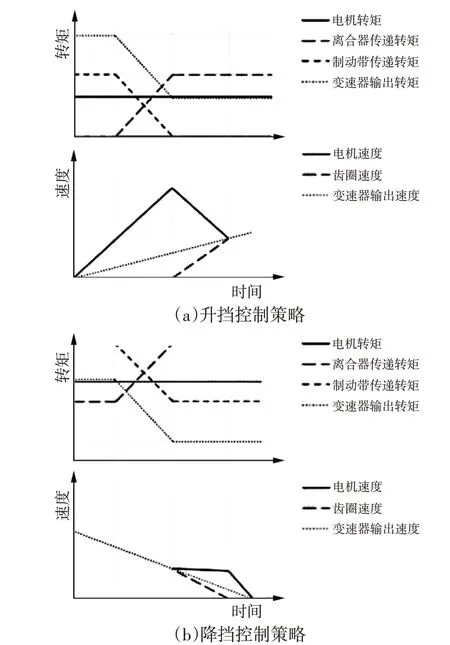
图7 新型单输入变速器换挡控制策略[16]
在1挡工作过程中,离合器传递转矩为0,升至2挡时,离合器蹄块的离心力需克服离心式离合器内部弹簧的作用从而传递转矩。在升挡过程中的转矩阶段,离合器传递转矩逐渐增加,而制动带传递转矩逐渐减小。随着行星架旋转速度随车辆速度成比例增加,离合器传递的转矩增加,导致制动带的静摩擦转矩相应减小。升挡转矩阶段齿圈转速一直保持为0,直到制动带转矩降至0为止。惯性阶段开始时,制动带传递转矩达到0,从而使齿圈旋转。在离心式离合器产生的摩擦转矩的作用下,齿圈与齿轮架之间的转速差减小。升挡的惯性阶段结束时,行星齿轮系统各部件在离合器转矩的作用下具有相同的转动速度。降挡过程与升挡过程类似。试验结果表明,该控制策略减少了能源消耗并提高了动力性。
Liang 等[52]针对电动车设计了一种双电机动力系统,以换挡动力性和经济性为目标,采用改进的模型预测磁链控制方法对电机转矩和转速进行控制。黄康等[53]通过多目标粒子群算法和Bellman 动态规划算法,建立优化后的换挡策略。在此基础上,通过广义回归神经网络提取动态规划的换挡优化结果,利用得到的换挡策略建立了自适应驾驶员模型和整车正向仿真模型,通过整车正向仿真分析对分层优化结果进行进一步选择。
单目标优化的换挡控制策略具有设计简单、对计算单元负荷小及易于实现的优点,且针对不同构型的电驱动桥性能特点进行相应的单目标优化,可使电驱动桥达到较好的整体性能。但单目标优化策略只能针对某单一性能进行优化,而不能使车辆整体性能最大化,甚至可能降低车辆其他性能。与单目标优化换挡控制策略相比,多目标优化换挡控制策略虽然设计难度较大、控制变量多,但是能够针对车辆的不同性能进行优化,从而根据不同需要最大化提升车辆整体性能。在目前电动汽车续航里程问题暂时得不到很好解决的情况下,电驱动桥换挡控制会朝着多目标控制方向发展,以在提升车辆燃油经济性的同时尽可能提高车辆其他性能。
3 结束语
电驱动桥作为电动汽车的核心部件,直接决定了电动汽车的性能。在电驱动桥构型方面,多挡电驱动桥在车辆动力性和经济性方面具有的独特优势,使其成为未来电驱动桥发展的趋势之一。但多挡化与集成化之间存在着一定矛盾,多挡化结构相对复杂,而集成化则需要结构相对简化,并且电驱动桥的集成化也对电驱动桥的散热以及可靠性提出了更高的要求。智能化程度不高也是目前面临的问题之一。目前电驱动桥的智能化仅仅是从部件的角度进行考虑,并没有将整车纳入考虑范围,这导致电驱动桥的智能化程度难以提高。此外,电驱动桥结构与传统车桥结构存在差异,目前零部件复杂程度高,制造难度大,导致成本较高。
总体看来,电驱动桥未来的发展方向为:协调多挡化与集成化之间的矛盾;基于新材料的应用,对电驱动桥结构进行设计,使其更加紧凑轻便;将电机与电驱动桥进一步融合;从整车角度考虑电驱动桥智能化,将整车数据进行互联,使智能化程度进一步提高;随着人工智能的快速发展,利用深度学习、强化学习等机器学习方法针对不同类型和结构的电动汽车制定更加智能化的换挡策略。
