长征五号运载火箭在线调姿规划方法
2021-06-19李学锋
张 宇,黄 聪,李学锋,王 辉,刘 畅
(北京航天自动控制研究所,北京,100854)
0 引 言
长征五号运载火箭发射任务在星箭分离前有姿态调整要求,二级二次主动段结束后为末修调姿段,调姿段火箭将姿态旋转到卫星需要的姿态,以使卫星分离后太阳帆板展开即可朝向太阳,同时天线指向满足与地面通信的要求。传统火箭采用摄动制导方式,调姿段初始程序角和终端程序角均为弹道程序角,在发射前已经确定,飞行时采用转动固定角度完成调姿功能[1]。长征五号火箭二级二次主动段采用迭代制导控制方式,调姿起始时的程序角是不固定的,转动固定角度的调姿方案已无法满足要求,因此需要改用在线规划的调姿方案[2]。
为解决初始程序角未知、终端程序角已知情况下的火箭调姿问题,本文提出2种程序角在线规划方法:a)三通道程序角在线调姿规划。采用欧拉角描述姿态,分别对俯仰、偏航、滚动通道程序角进行在线实时规划。b)程序四元数在线调姿规划。采用四元数描述姿态,对程序四元数进行在线调姿规划,之后计算偏差四元数,并将其分解到箭体系进行控制。
1 三通道程序角在线调姿规划
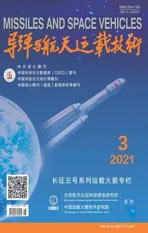
使用欧拉角描述火箭姿态,三通道的初始姿态角为俯仰角0φ、偏航角0ψ、滚动角0γ,终端程序角为俯仰程序角φcx_end、偏航程序角ψcx_end、滚动程序角γcx_end,调姿起始时间0T,调姿结束时间1T。调姿过程中t时刻的程序角按照式(1)进行在线实时规划:

式中α为程序角,α=φ,ψ,γ,其中,φ,ψ,γ分别为俯仰角、偏航角、滚动角;ΔT为调姿时间参数,本文令
3个通道的程序角均按照式(1)计算,能够得到实时规划出的t时刻俯仰程序角φcx(t)、偏航程序角ψcx(t)和滚动程序角γcx(t)。在线规划程序角示意如图1所示,可以看出用此方法规划出的程序角较为平滑,有助于减小调姿过程中的姿态角超调,实现火箭平稳调姿。
图1 在线规划程序角示意Fig.1 On-line Planning Program Angle Diagram
2 程序四元数在线调姿规划
首先将姿态角和程序角从三通道欧拉角描述方式转换为四元数姿态描述方式,之后计算出初始姿态和目标姿态之间的夹角β,按照梯形调姿公式进行实时在线规划,解算出程序四元数,再根据姿态四元数和程序角四元数计算出偏差四元数,并分解到箭体系进行控制。
已知三通道的初始姿态角0α(0φ,0ψ,0γ)、目标程序角、调姿起始时间T0、调姿结束时间T1[3]。
a)将φ0、ψ0、γ0和φcx_end、ψcx_end、γcx_end按式(2)转换为程序四元数 0Q和1Q。

计算四元数P:

b)对四元数P进行判断,根据当前姿态与目标姿态的差距进行不同处理,具体操作为将转角分为A、B、C 3个区域。

图2 转角β分布示意Fig.2 Angle β Distribution Diagram
A区域:调姿前姿态四元数与目标程序四元数接近,无需进行规划,即:

B区域:调姿前姿态四元数与目标程序四元数相差半圈以内,直接进行程序四元数规划,令:

C区域:调姿前姿态四元数与目标程序四元数相差超过半圈,处理为从对侧小圈方向规划,以使规划出的转角β不大于180°。即:
若β>π,按式(3)计算后,还需进行如下处理:

c)对程序四元数进行实时规划,仍然采用角速度为梯形的规划公式进行调姿规划。
令:α0=0,α1=β,带入式(1)计算得到β(t)。
d)利用式(4)计算P(t)。

e)利用式(5)计算t时刻的程序四元数。

f)利用式(6)计算t时刻的偏差四元数:

式中Q(t)为t时刻的姿态四元数。
将偏差四元数 ΔQ(t)分解到箭体系三通道即可用于控制指令计算。
基于偏差四元数进行姿态控制规律计算,不会出现姿态角穿越问题,也不会出现 “转多圈” “转大圈”问题,该控制方式可有效解决大姿态控制问题,提高了姿态控制设计任务适应性[5]。
3 数学仿真
3.1 调姿段动力学模型
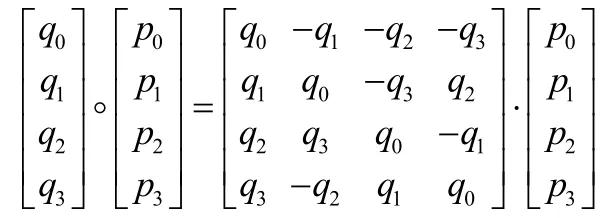
调姿段三通道绕心运动方程[6]:
式中ω为箭体绕心角速度;J为转动惯量;K为姿控喷管开关状态字;为干扰力矩系数;b3,d3为控制力矩系数。
假设调姿起始姿态俯仰角、偏航角、滚动角为(-113°, 0°, 0°),调姿终端姿态为(-30°, -10°,-90°),设定总调姿时间为T1-T0=60 s,参数ΔT=15 s。
3.2 三通道程序角在线调姿规划仿真结果
采用三通道程序角在线调姿规划方法进行数学仿真,数学仿真结果典型曲线见图3、图4。

图3 三通道程序角和姿态角Fig.3 Three Channel Program Angle and Attitude Angle
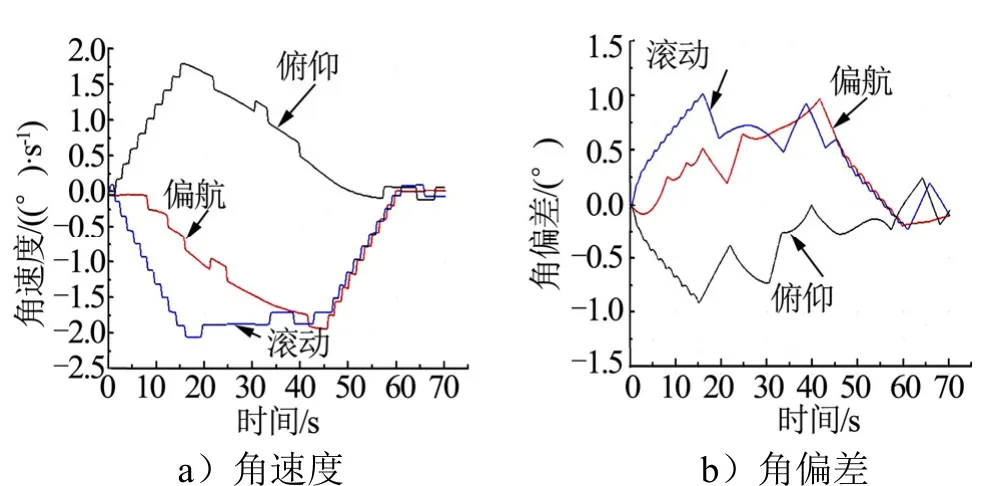
图4 三通道角速度和角偏差Fig.4 Three Channel Angular Velocity and Angular Deviation
三通道程序角调姿规划仿真中的姿控喷管开启次数和燃料消耗见表1。

表1 姿控喷管开启次数Tab.1 Opening Times of Attitude Control Nozzles
从仿真结果可以看出,“三通道程序角在线调姿规划”能够规划出平滑的程序角,火箭姿态跟踪程序角良好,调姿结束后角偏差较小,精度较好。
使用欧拉角进行姿态描述时,按照φ、ψ、γ的转序,偏航角的值域为(-90°, 90°),在接近90°附近会出现计算奇异,因此,需要对90°附近的计算进行保护处理[7]。
3.3 程序四元数在线调姿规划仿真结果
使用四元数描述姿态时,没有偏航角小于90°的限制,也不会出现计算奇异。采用程序四元数在线调姿规划方法,数学仿真结果典型曲线如图5、图6所示。
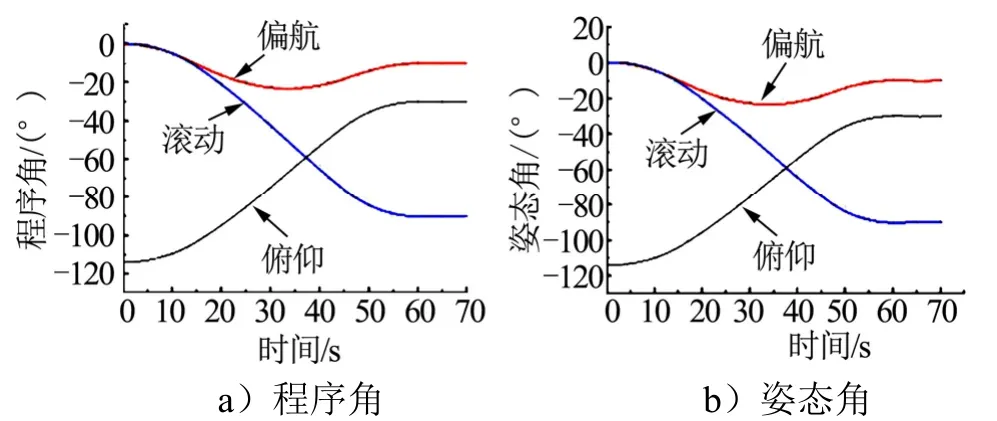
图5 三通道程序角和姿态角Fig.5 Three Channel Program Angle and Attitude Angle

图6 三通道角速度和角偏差Fig.6 Three Channel Angular Velocity and Angular Deviation
程序四元数调姿规划仿真中的姿控喷管开启次数和燃料消耗见表2。

表2 姿控喷管开启次数Tab.2 Opening Times of Attitude Control Nozzles
可以看出,使用“程序四元数在线调姿规划”也能够规划出平滑的程序角,与“三通道程序角在线调姿规划”的程序角略有差别,调姿结束后角偏差均能达到小于0.5°。程序四元数调姿规划仿真的姿控喷管开启总次数和燃料消耗量略大于三通道程序角调姿规划仿真。这两种方法均能完成调姿程序角规划功能。
由于这2种方法是根据火箭实际飞行姿态进行程序角规划,因此对二级二次飞行段结束时的一些特定故障有一定的适应能力。例如,某些故障导致二级二次飞行段耗尽关机、关机时姿态角偏差偏大,转入调姿段后在线调姿规划算法将规划出一条从当前实际飞行姿态转到目标姿态的程序角,比按固定程序角调姿的适应性更强[8]。
4 结 论
本文针对新一代大型运载火箭长征五号调姿段初始程序角未知、终端程序角已知的特点,提出了2种在线调姿规划方法。这2种方法均能实现初始程序角不固定、终端程序角固定的在线程序角规划,规划出平滑的程序角,完成调姿功能。其中四元数调姿方案能够自动实现最短路径调姿,能够避免“转多圈” “转大圈”的问题,对调姿段初始的姿态偏差故障有一定的适应能力,向智慧火箭迈进了一步。方案已通过长征五号火箭飞行验证。