某型自旋翼无人机横侧向控制策略研究
2021-06-18盖科龙梁宇星黄一敏
盖科龙,梁宇星,黄一敏
(南京航空航天大学 自动化学院,江苏 南京 211100)
自旋翼飞机是旋翼类飞行器的一种,整体结构组成部分主要有机身、旋翼桨盘、方向舵、发动机、起落架、平尾和垂尾等。其旋翼结构与外形类似于直升机的旋翼,但是不与发动机相连,仅仅依靠相对来流维持自转,为自旋翼机提供升力[1-2]。同时,自旋翼机旋翼桨盘可自由旋转,通过操纵旋翼桨盘横向与纵向倾角,可使自旋翼飞机升力方向产生变化,从而改变自旋翼机的飞行姿态[3]。自旋翼机发动机与固定翼飞机类似,沿机体纵轴方向安装,为自旋翼提供前向力。
针对某装备试验平台设计的自旋翼无人机,虚拟参考反馈校正的姿态控制方法较模型参考自适应方法有一定优越性[4]。针对某基于升降舵辅助操纵的自旋翼机,基于神经网络动态逆的姿态控制方法在一定程度上减轻了纵向周期变距的高频偏转,抑制了纵向挥舞角的高频变化,有利于提高姿态跟踪效果与飞行安全[5]。某型自旋翼无人机的辨识建模技术和飞行控制策略也取得一些进展[6-7]。上述方法均是从改进控制器的品质以及重新设计控制结构进行设计,虽然控制效果已得到仿真验证,但其控制方法较为复杂,对机载设备传感器精度要求较高,无法灵活运用于实际工程之中。
针对某型自旋翼无人机空中巡航横侧向的控制问题,以该自旋翼无人机作为研究对象,对样例自旋翼机进行建模,并分析其特性,研究设计横侧向控制策略与控制律,使其完成全过程的自主起降飞行与其他无人飞行科目。
1 建模
样例自旋翼机结构如图1所示。该型号自旋翼无人机为200 kg级别无人机,包含前三点式起落架、跷跷板式定桨距旋翼、机身、活塞式螺旋桨发动机和方向舵。控制舵面共有6个,包含桨盘纵向倾角、桨盘横向倾角、发动机油门开度、前轮偏转、刹车力度以及方向舵偏转。
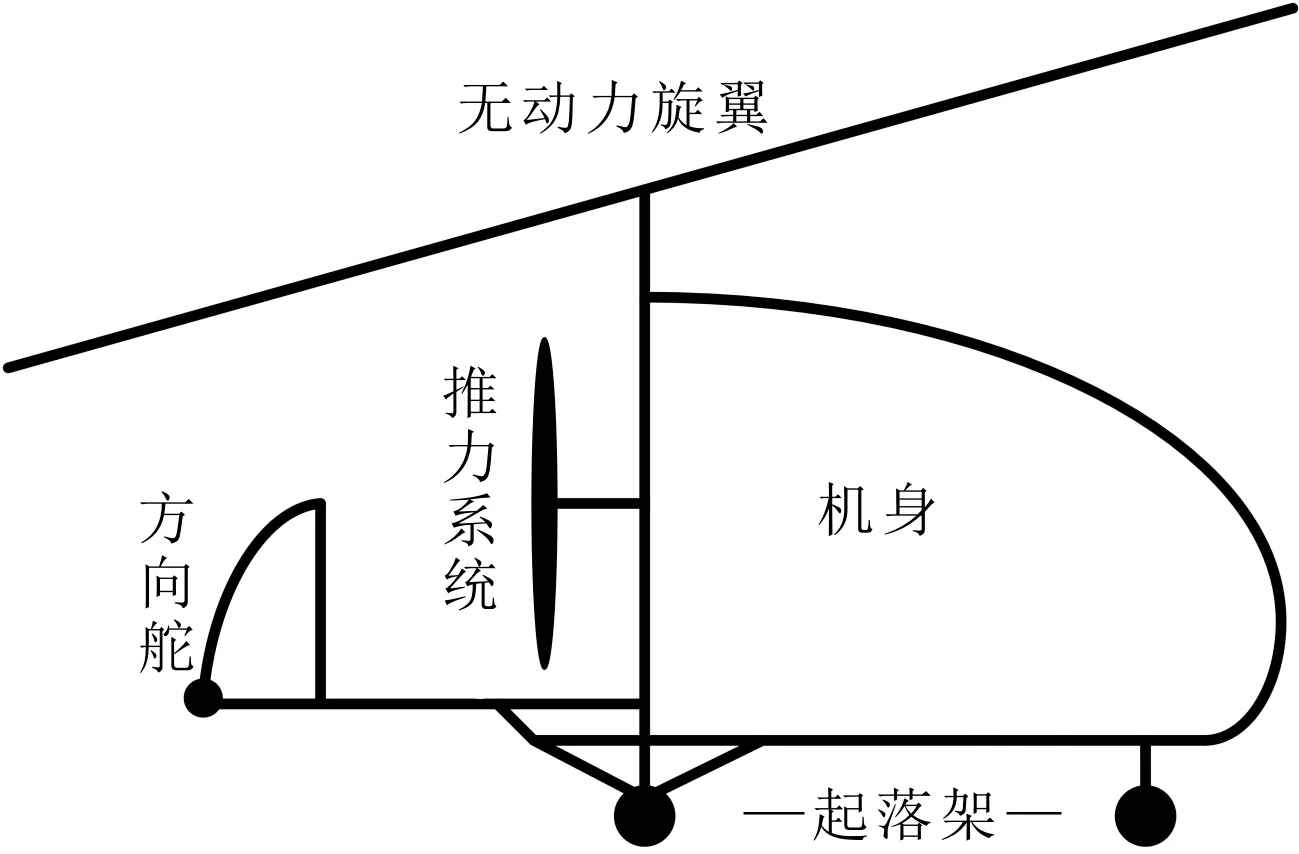
图1 样例自旋翼机结构
1.1 建模思路与实现方法
自旋翼无人机是一个复杂的多体动力系统,主要由旋翼、发动机、机身、平尾、垂尾以及起落架组成。根据样例自旋翼无人机自身的结构特点,在进行自旋翼无人机动力学建模时,采用分部件建模的思路[8-9]。建模对象分别为旋翼、发动机、方向舵垂尾、机身和起落架等5个部分。这5个部分根据建模方法的不同,又分为Rotorlib模型和传统固定翼气动模型。传统固定翼气动模型包含机身、推力螺旋桨发动机以及垂尾方向舵的气动模型。这种方法建模主要是根据总体方给出相应气动数据,建立所对应的数据库插值表,并利用气动计算公式与方法,将其解算为力与力矩,应用到自旋翼无人机模型中。而借助Rotorlib模型可完成自旋翼无人机旋翼部分与起落架部分的建模。最后,将各部分的力与力矩集成到六自由度刚体模型中,计算得到相关的飞行状态及状态导数,从而得到自旋翼无人机非线性模型,其结构如图2所示。
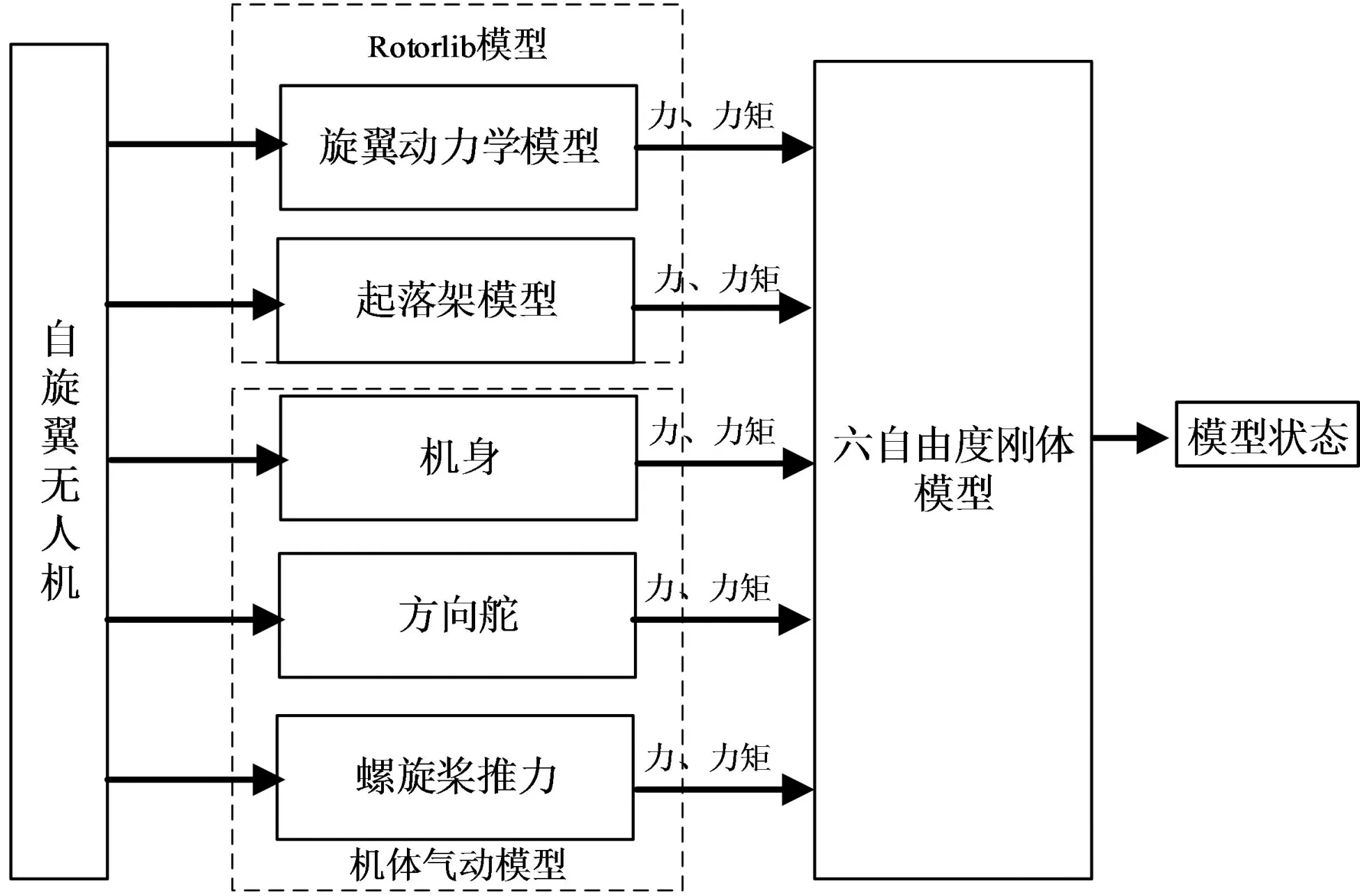
图2 自旋翼无人机非线性模型结构
对非线性模型进行线性化,得到样例自旋翼机模型的数学模型表达为
其中:状态向量x=[uvwpqrφθψΩ]T,u为前向速度,v为右向速度,w为垂向速度,p为滚转角速率,q为俯仰角速率,r为偏航角速率,φ滚转角,θ俯仰角,ψ航向角以及Ω旋翼转速;控制向量u=[δtδaδeδr]T,δt为油门开度,δa为桨盘横向倾角,δe为桨盘纵向倾角以及δr为方向舵偏角。
对比线性化与非线性两种模型的时域操纵仿真响应,考察控制量油门开度、桨盘横向倾角、桨盘纵向倾角和方向舵偏角等4个通道对应的主状态量响应的差异,结果分别如图3—图6所示,图中实线代表线性模型,虚线代表非线性模型。对于线性模型,状态初值取0,对于非线性模型,状态初值取配平值。4种操纵量均为脉冲输入,幅值为单位舵面,持续时间为0.5 s。
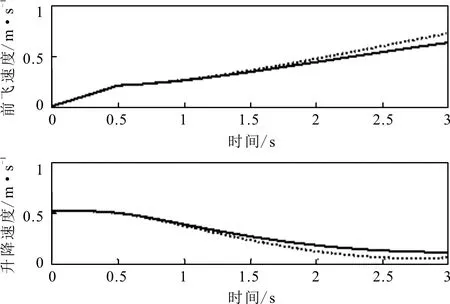
图3 油门开度输入扰动对比
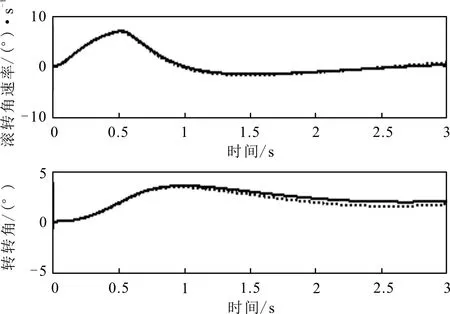
图4 桨盘横向输入扰动对比
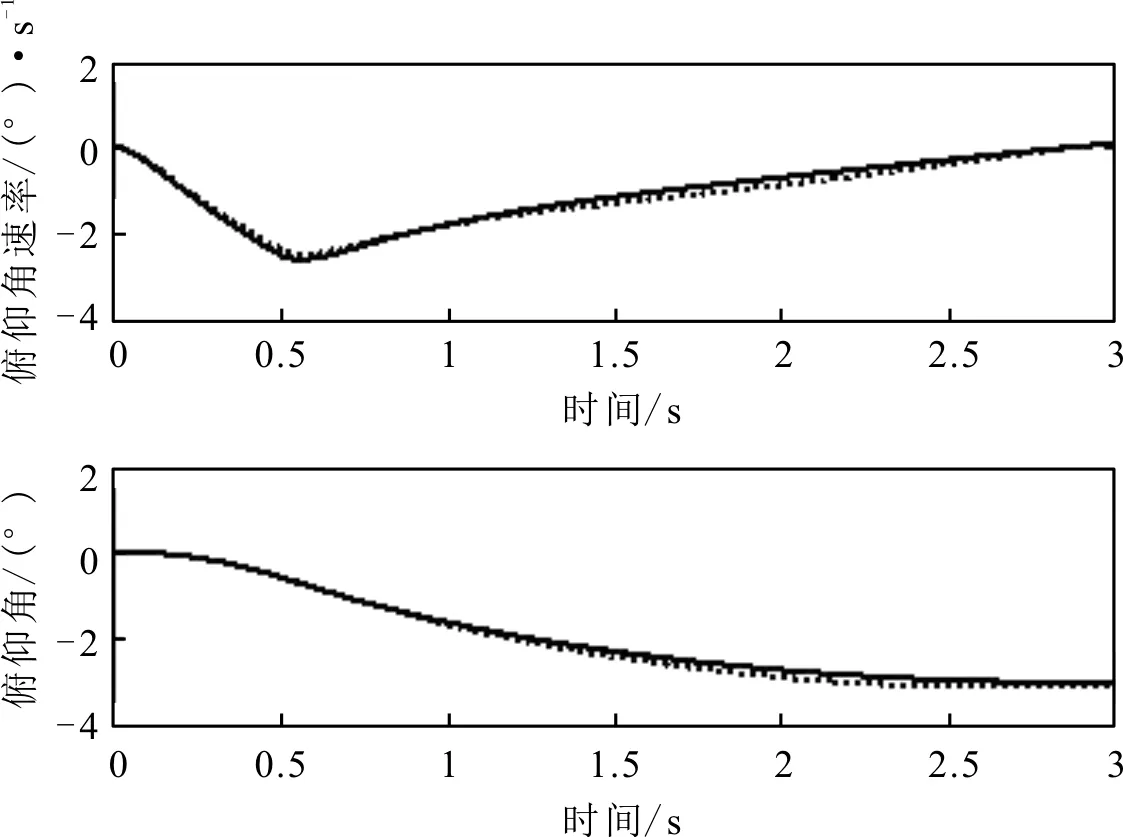
图5 桨盘纵向输入扰动对比
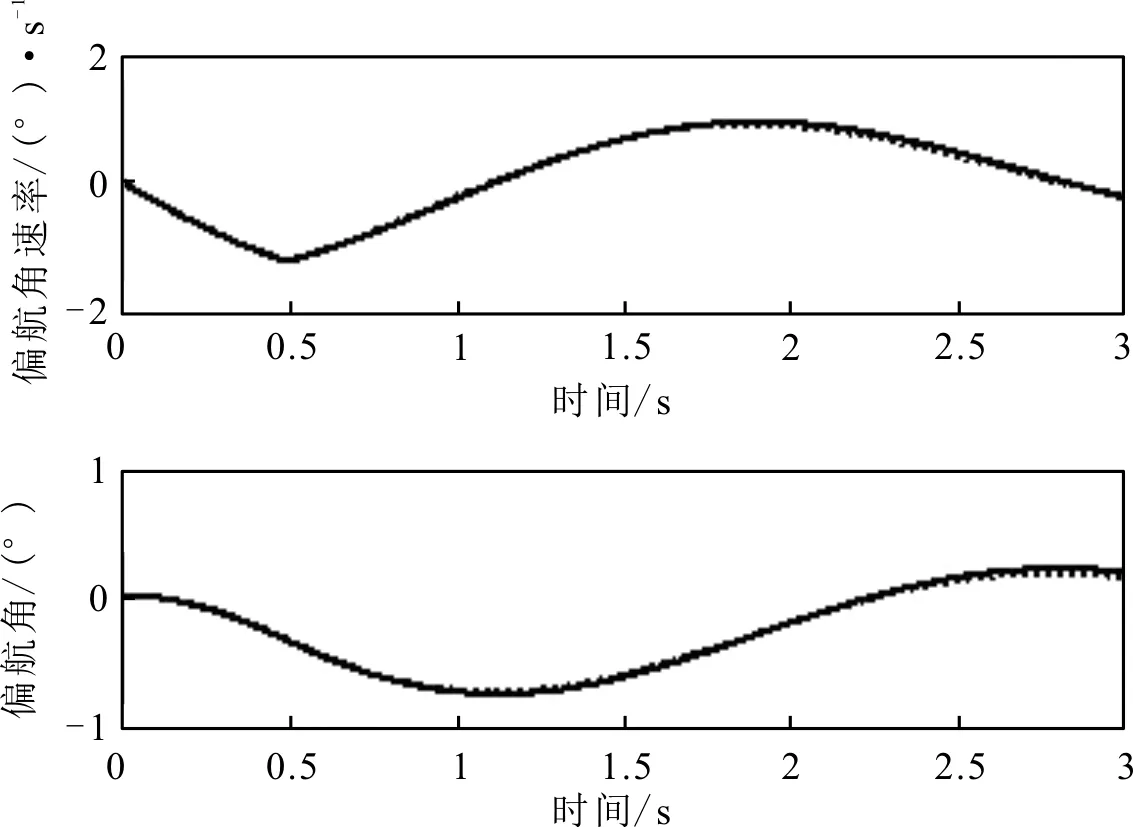
图6 方向舵输入扰动对比
由图3—图6可知,线性模型与非线性模型吻合程度良好。因此,采用线性模型设计样例自旋翼无人机的控制器,能较为准确地反映非线性模型描述的自旋翼无人机动力学模型的主要特性。
1.2 横侧向模态分析及问题描述
在高度200 m,前飞速度20 m/s的配平状态下通过获取状态矩阵A的特征值,对各特征值下的特征矢量与状态变量进行分析,得出自旋翼无人机横侧向模态下的开环特征根如表1所示。
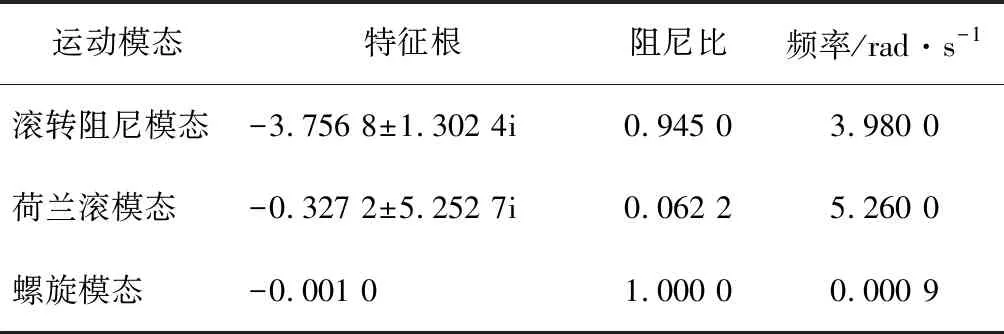
表1 样例自旋翼机横侧向特征根
螺旋模态主要表现为非周期的缓慢偏航和滚转运动,具有螺旋运动特性。荷兰滚模态其主要特征是侧向速度、偏航角速率和偏航角呈现高频率的周期震荡,同样也伴随着线运动呈现长周期特性。样例自旋翼无人机的荷兰滚阻尼为0.062 2,偏小,需要增强荷兰滚模态的阻尼。滚转阻尼模态主要特征是滚转角和滚转角速率呈现衰减快的短周期运动。由于滚转通道的转动惯量较小,因此,滚转阻尼模态衰减周期较短,阻尼比为0.945,较大。
模型中提取油门输入通道对偏航角的行频率响应如图7所示。在零状态条件下,油门通道输入0.5 s 10%油门开度脉冲信号,得到油门开度对偏航影响的时域响应如图8所示。
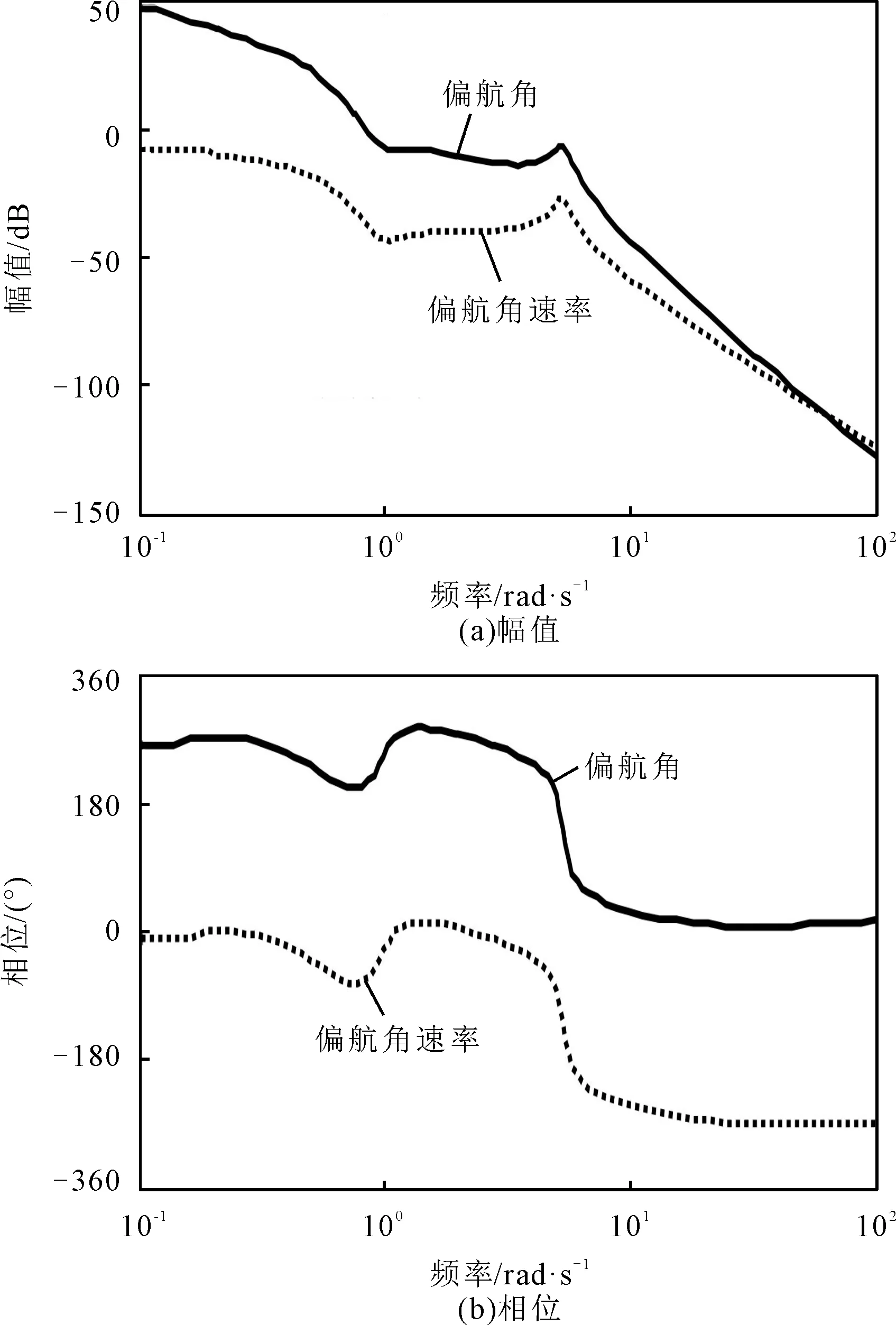
图7 油门操纵开环频域响应
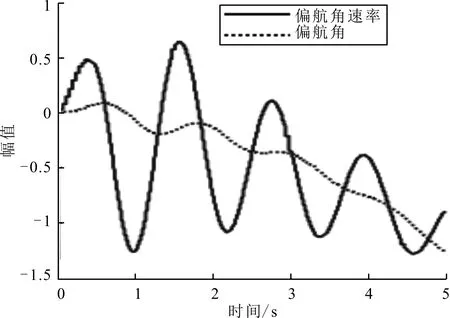
图8 油门通道时域响应
由图7和图8可知,油门的操纵对样例自旋翼机偏航通道存在干扰力矩:频域响应中,油门通道对于偏航角在低频段有较高的增益;时域响应中,油门通道的操纵使得偏航角速率开始震荡,并最终导致偏航角的漂移,这是由发动机滑流以及其自身反扭矩所导致。发动机滑流是由于样例自旋翼无人机的机体方向舵与发动机螺旋桨的桨叶距离很近,不到1 m,导致发动机在工作时,其轴向滑流会增加方向舵附近气流的动压,其周向滑流会改变方向舵附近气流的流动方向,使方向舵附近发生气流侧滑,生成侧力,并对自旋翼无人机造成附加的横侧向干扰力矩,这个干扰力矩受油门大小影响。因此,样例自旋翼无人机在空中巡航飞行时横侧向存在干扰,这对其横侧向控制策略以及控制律设计带来了挑战。
2 横侧向控制策略研究
2.1 飞行模态描述
自旋翼无人机在空中巡航的过程中,需要通过其横侧向控制律,维持无人机姿态与航迹的稳定。同时,又由于巡航时各个航段所设计的方向不同,需要自旋翼无人机在航段交接时,通过改变其横向模态,以左转或右转方式改变航向,以达到航段期望的航向角。因此,自旋翼无人机横向可以分为直飞、左/右转模态。
直飞模态是指自旋翼无人机速度方向与机体轴线方向相同,飞行方向保持不变。直飞模态需要通过滚转角控制保证横侧向姿态水平,达到航向保持,并通过航迹控制,以达到自旋翼无人机飞行轨迹跟踪航线的效果。左/右转模态是指自旋翼无人机在航段交接的过程中,由于期望航向角与当前姿态差距较大,自旋翼无人机通过滚转作动,连续改变飞行方向以达到期望航向。左/右转模态实现过程,需要滚转角控制、航迹控制以及航向控制协同完成。自旋翼无人机横侧向模态实现如图9所示。
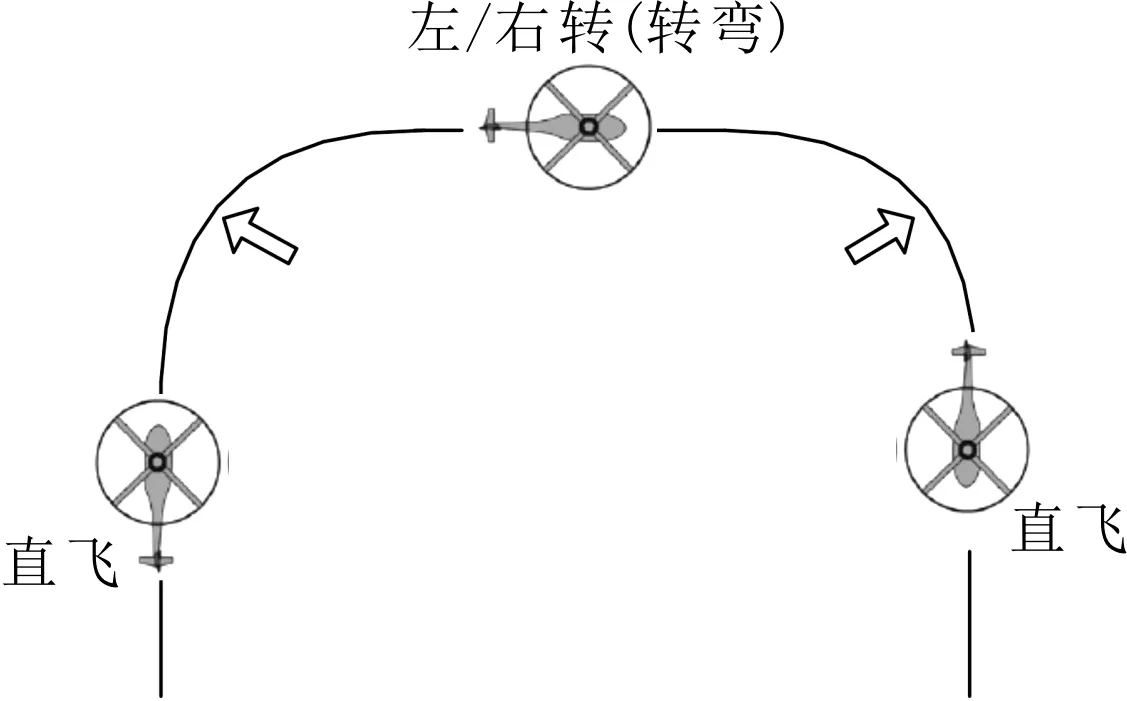
图9 自旋翼无人机横侧向模态
根据样例自旋翼无人机横侧向存在干扰的问题以及其横侧向两种模态下的不同要求,自旋翼无人机横向控制部分划分为直飞控制阶段和转弯控制阶段。直飞控制阶段,自旋翼无人机通过航迹以及航向控制保证无人机机头对准航线机身不侧偏。转弯控制阶段,自旋翼无人机通过航迹偏航以及航向控制保证无人机在转弯过程中航向紧跟指令,转弯结束后无人机机头对准航线机身侧偏为0。
2.2 直飞控制阶段
2.2.1 控制机理
自旋翼无人机直飞模态,是指自旋翼无人机在水平面内依照规定航线进行飞行,同时保证飞行方向保持不变。在该模态下,无人机航向按照指令给定保持不变,航迹则通过航迹控制实现航迹跟踪效果。在设计自旋翼无人机直飞段横侧向控制律时,可借鉴传统固定翼飞机横侧向控制思路。传统固定翼飞机横侧向控制系统包括姿态控制系统和轨迹控制系统。姿态控制系统的功能是保证高精度的偏航角和滚转角的稳定与控制,轨迹控制系统的功能是实现侧偏的稳定与控制,使无人机按照预定航迹直线飞行[10]。传统固定翼飞机横侧向主要依靠副翼与方向舵控制,而反映到自旋翼无人机时,就转化为使用桨盘横向倾角和方向舵偏角控制,自旋翼无人机横侧向控制如图10所示。通过桨盘横向角和方向舵的联动,实现滚转控制回路、航迹控制回路以及航向控制回路。其中,航迹控制回路生成滚转角指令,滚转角控制回路通过改变机身滚转角,使桨盘拉力倾斜,达到修正侧偏以及偏航的效果[11]。
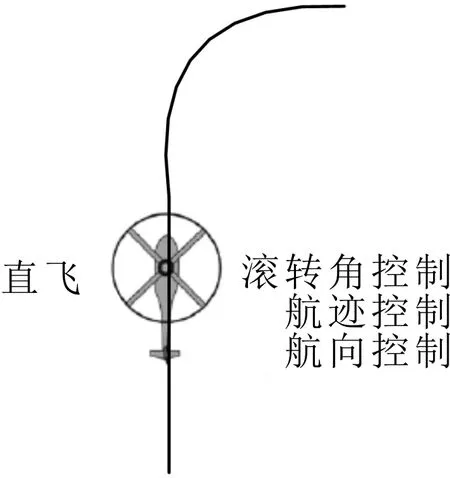
图10 自旋翼无人机直飞模态
2.2.2 控制结构设计
采用比例积分微分(Proportional Integral Derivative,PID)反馈控制方法设计控制结构。在整个航迹控制回路中,滚转角控制作为航迹控制的内回路存在,是横侧向控制中最基本的模态。控制滚转角不仅可以稳定飞行姿态,通过控制滚转角改变自旋翼无人机升力方向带来的偏航力矩,以实现横侧向模态左/右转以及直飞的切换。样例自旋翼无人机滚转角控制采用PD控制,即滚转角反馈构成角稳定回路,滚转角速率反馈提高系统阻尼。
航迹控制外回路为航迹制导回路,采用侧偏距PI控制与偏航角控制的组合策略,偏航角控制回路可作为航线侧偏距的阻尼回路。偏航角与侧偏距及侧偏积分计算得到滚转角控制指令,作为滚转控制回路的输入指令,使桨盘拉力倾斜达到修正偏航角和侧偏的目的。当自旋翼无人机存在侧偏距时,通过操纵桨盘横向倾角,使无人机产生滚转倾斜,升力与重力在横侧向上的分量共同作用,使自旋翼无人机的飞行速度向减小侧偏距的方向偏转,从而实现侧偏距的修正[12]。根据以上控制策略,得出控制律的计算表达式为
其中:δa为桨盘横向倾角;δatrim为桨盘横向倾角配平;φ为滚转角;φc为滚转角指令;φctrim为滚转角配平;p为滚转角速率;ΔZ为侧偏距偏差;Δψ为偏航角偏差;δr为方向舵偏角;δrtrim为方向舵配平;r为偏航角速率;K为控制参数。所对应的直飞控制结构如图11所示。
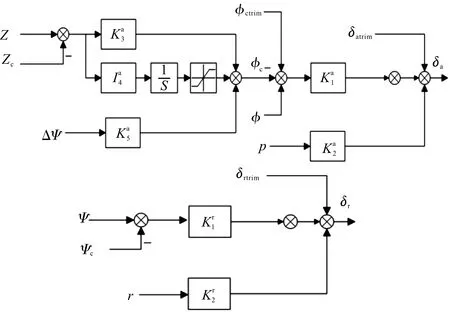
图11 直飞控制结构
2.3 转弯控制阶段
2.3.1 控制机理
自旋翼无人机转弯模态与直线飞行模态,在横侧向控制上的要求不同,转弯时需要自旋翼无人机机体产生滚转,从而给转弯提供向心力。因此,自旋翼转弯横侧向控制是以滚转角控制为基础的。在自旋翼无人机转弯开始时,机身横侧向姿态由水平转为滚转状态。在这个过程中,转弯初始侧偏距过大,在转弯时放弃控制侧偏距,在直飞的航迹控制去除中侧偏距反馈回路只保留偏航角回路,因此,被称为自旋翼无人机转弯偏航控制。此时,飞控给出滚转角指令完成滚转姿态的建立,同时,也给予固定航向指令达到航向的持续跟踪。自旋翼无人机机体保持一定滚转角,速度方向不断改变,航迹保持圆弧轨迹,航向控制跟踪指令航向。当无人自旋翼机航向与预定航线的航向差小于10°后,自旋翼无人机姿态由滚转变为水平,偏航控制转变为航迹控制。自旋翼无人机转弯模态如图12所示。
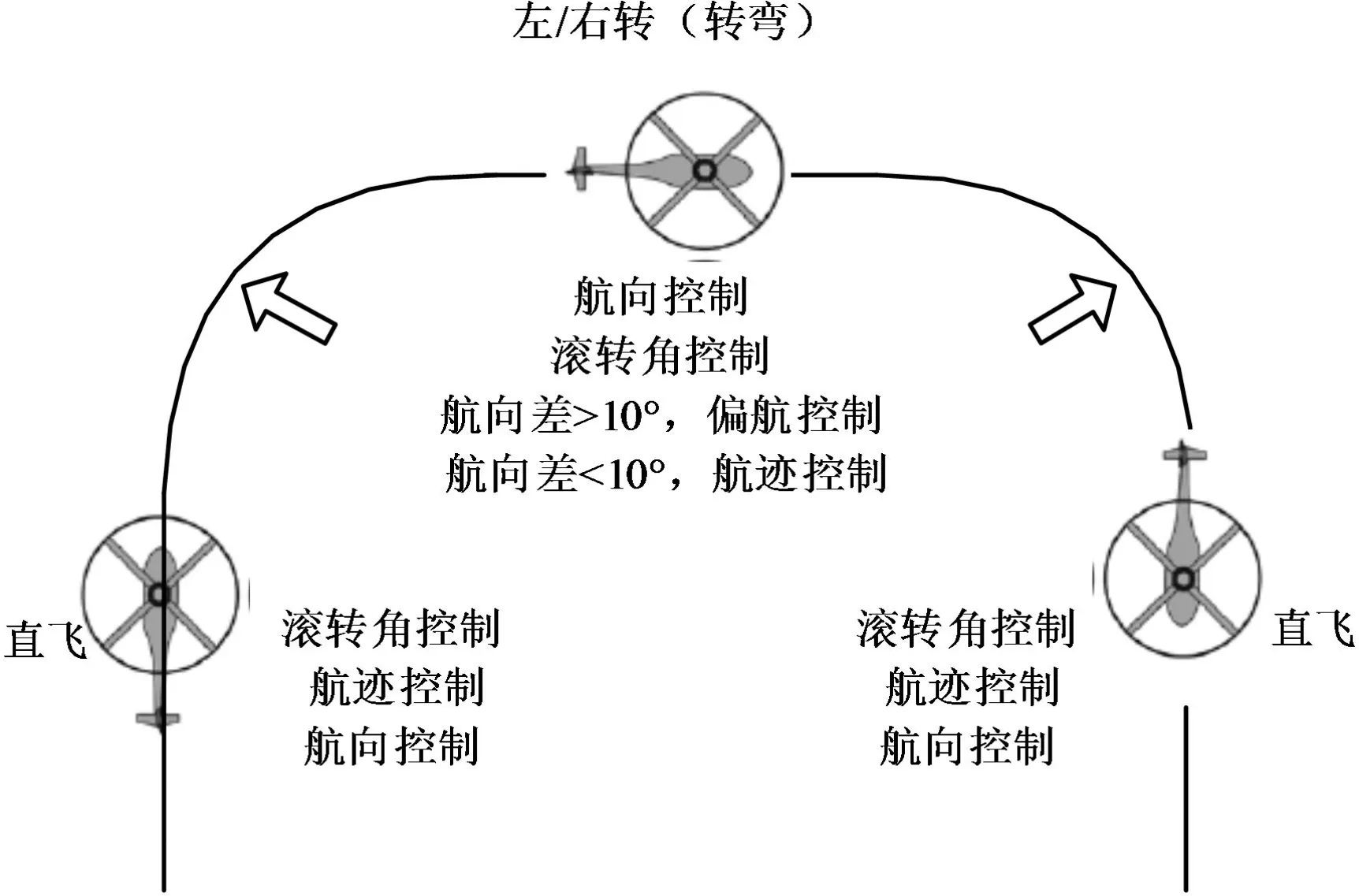
图12 自旋翼无人机转弯模态
2.3.2 控制结构设计
转弯时,偏航控制回路替代直飞时的航迹控制回路,直到偏航角小于10°,即转弯结束。其主要原因是自旋翼无人机在转弯过程中初始侧向偏差较大,且控制目标是滚转角的跟踪与航向角的跟踪,因此,在转弯时断开原直飞时的航迹控制回路,重新设计偏航控制回路,保证航向角的跟踪,以此达到航向修正、转弯飞行的效果。偏航控制内回路为滚转角控制回路,滚转角速率反馈到桨盘横向倾角,作为滚转阻尼器,滚转角反馈用于控制机身滚转角,增大系统阻尼,滚转角积分用于提高系统精度,实现滚转角跟踪。外回路偏航角比例控制,以提供滚转角指令,其控制律为
转弯控制结构如图13所示。
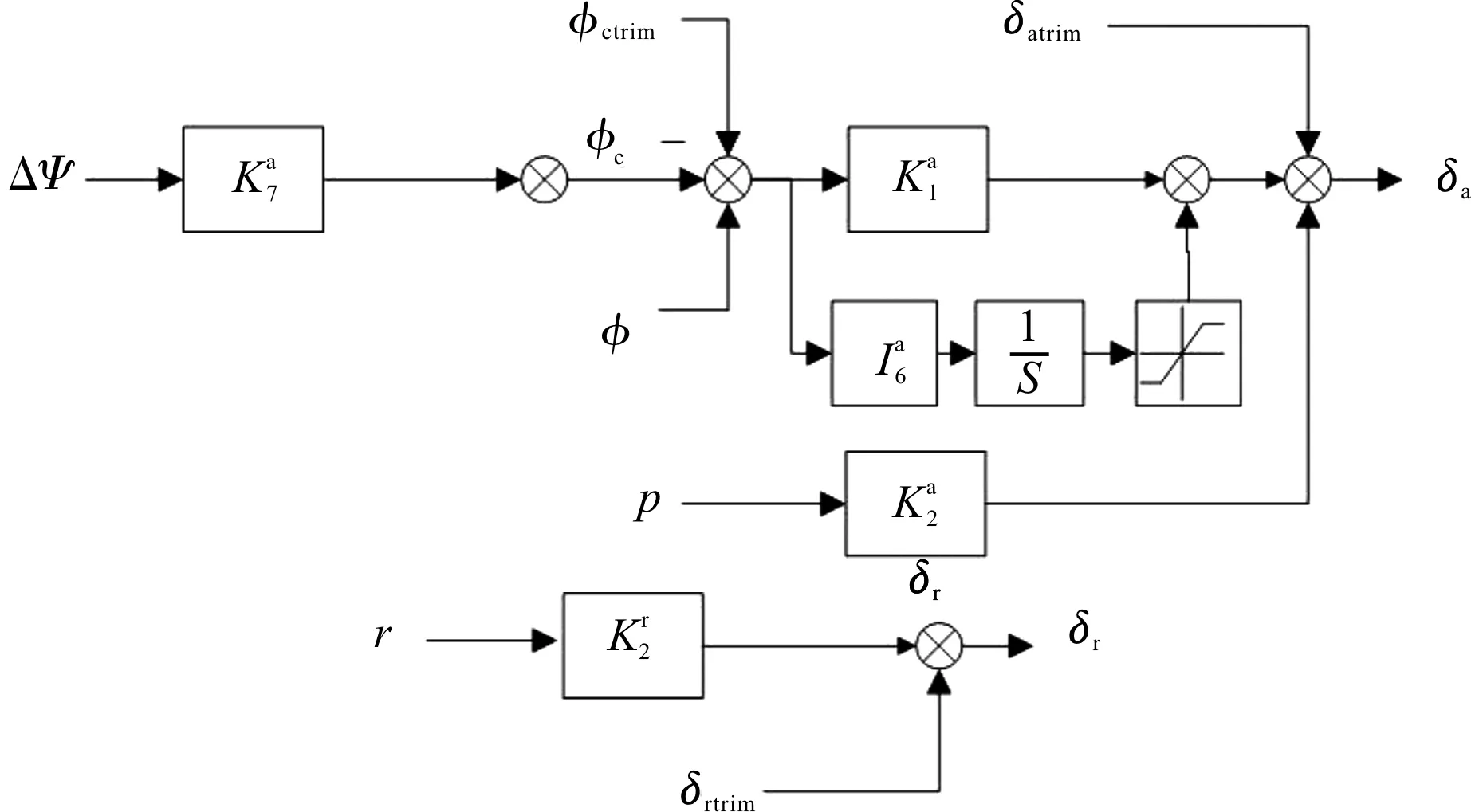
图13 转弯控制结构
3 仿真测试及实飞验证
3.1 仿真测试
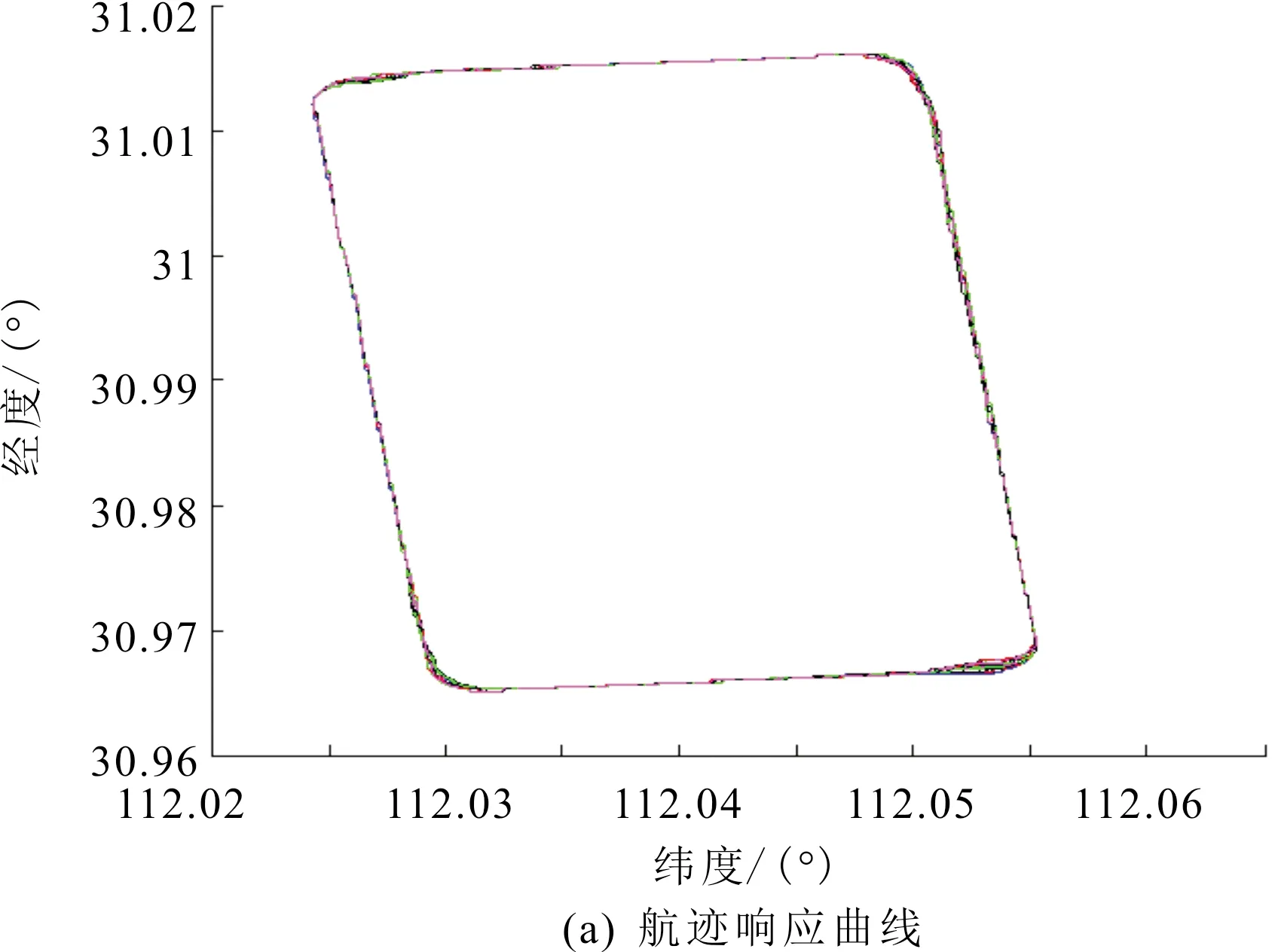
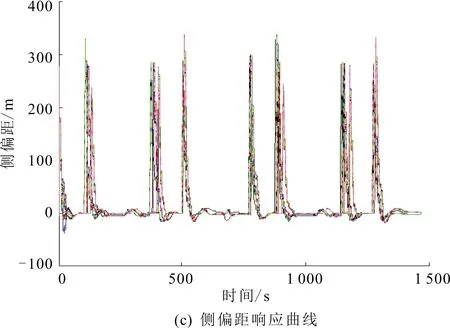
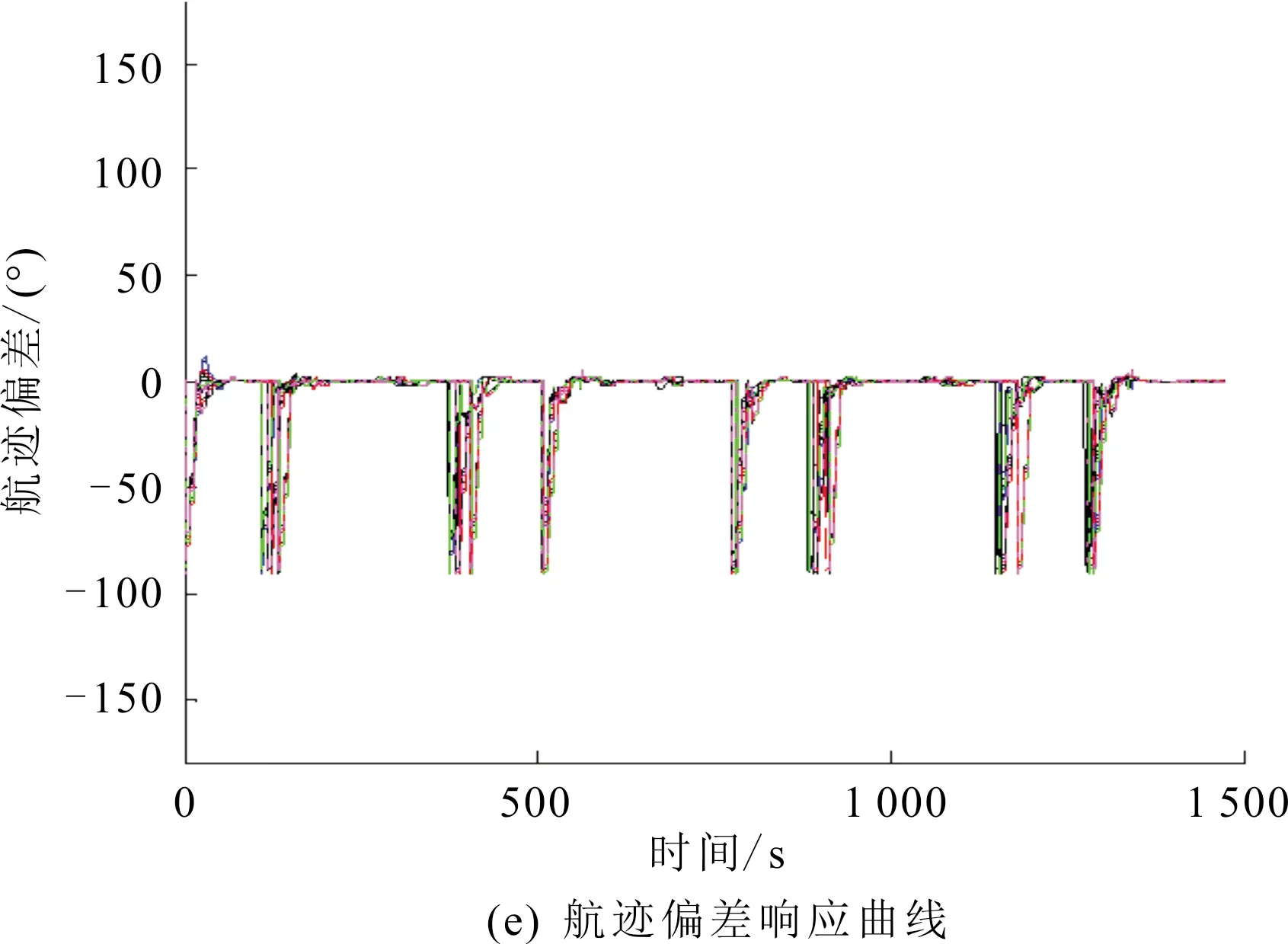
通过添加质量、舵效以及侧风不确定性,验证控制律在干扰条件下的实时性和鲁棒性是验证控制策略以及控制律重要途径[13-15]。所添加的干扰项目如表2所示,仿真结果如图14所示。
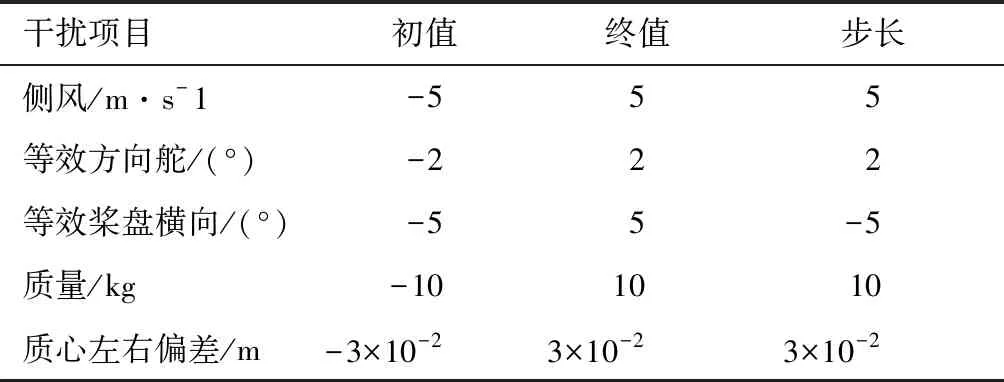
表2 鲁棒性测试干扰项目
由图14(a)和图14(b)可知,各不确定性组合的干扰下,自旋翼无人机能够按照预设航线进行飞行。图14(c)中直飞段侧偏距能够较稳定在0 m附近。转弯阶段造成的300 m侧偏距误差能够在50 s左右快速纠正到安全范围且不震荡。图14(e)和图14(f)中,受到不同速度侧风干扰下的滚转角与航向角误差均在100 s左右,收敛快速且不产生震荡,维持了整个飞行过程。由此可知,在整体仿真测试中,自旋翼无人机在受到不同组合的干扰之后,姿态与侧偏可控且能在100~150 s收敛,横侧向参数均满足控制指标,控制律的实时性与鲁棒性均得到保障,满足飞行要求。
3.2 实飞验证
在仿真测试完成后,样例自旋翼无人机针对横侧向控制策略进行3次实飞验证,其中一次实飞数据结果如图15所示。
由图15可知,全过程飞行航迹跟踪良好速度稳定在20 m/s,高度跟踪稳定,除转弯外侧偏距能稳定在0 m附近,转弯带来的侧偏距与偏航角扰动均能快速收敛且不震荡,飞行过程安全可靠。同时,与图14仿真结果对比,二者反应的特性与数据较为吻合,表明控制策略效果良好,满足飞行要求。
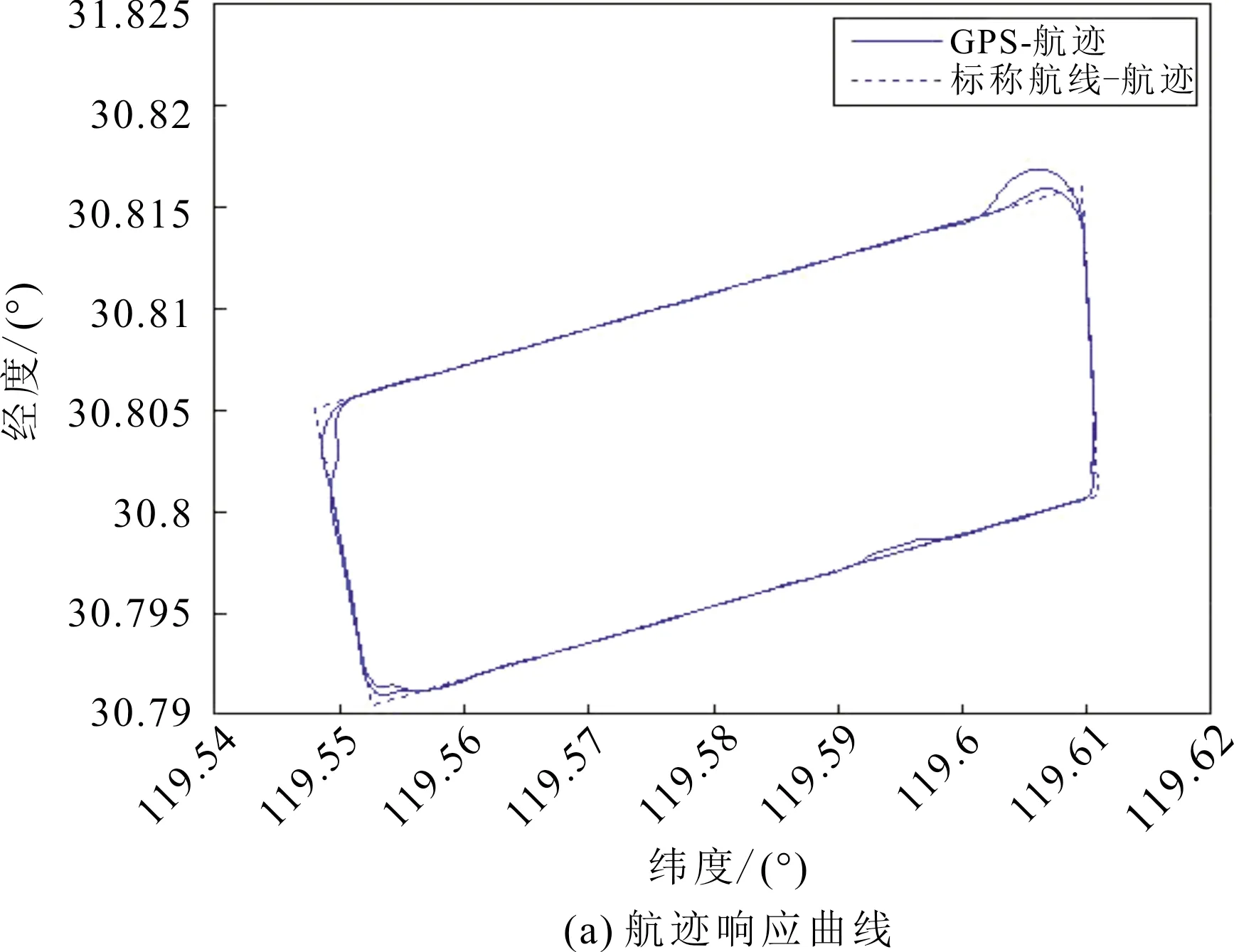
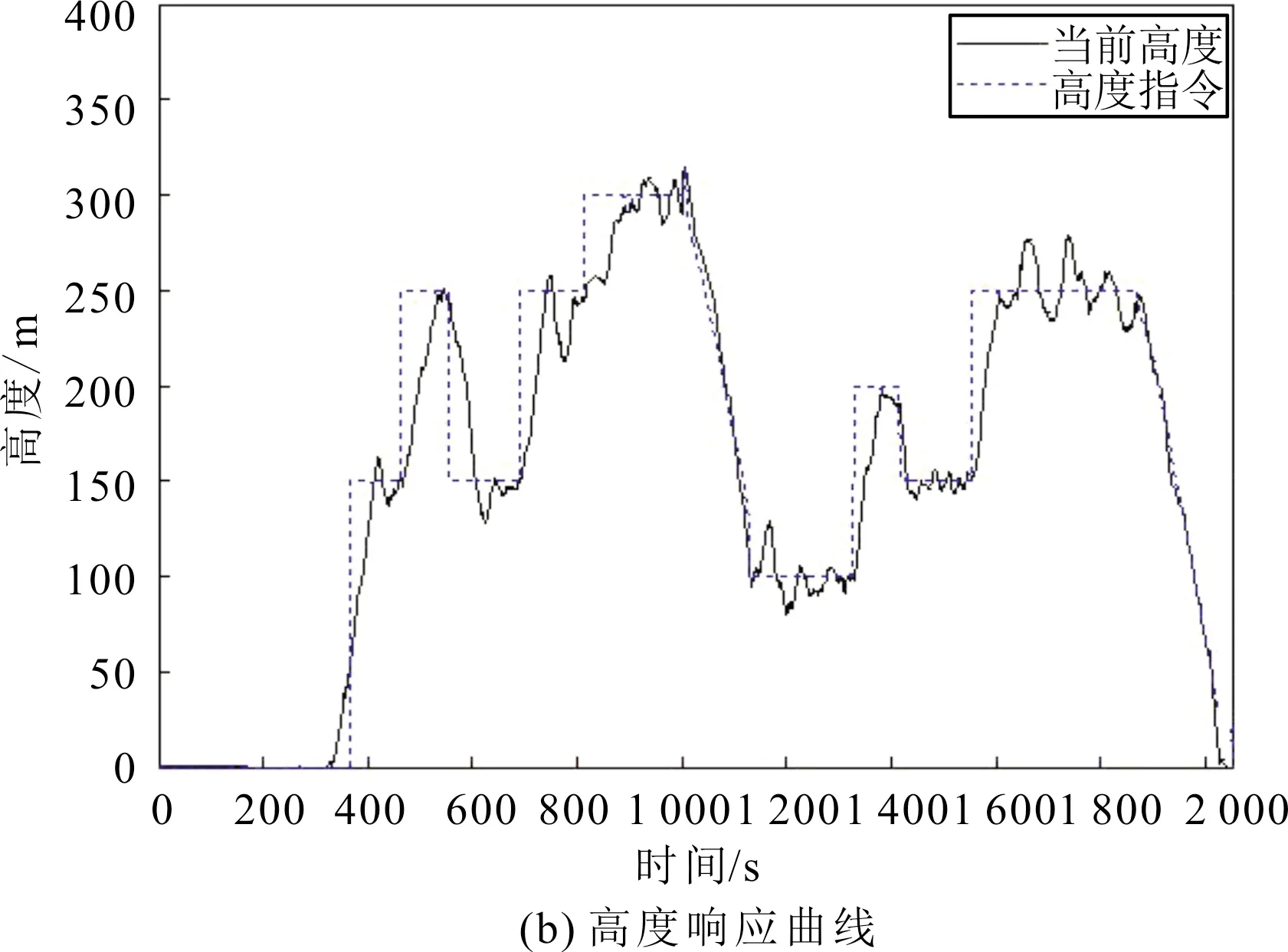
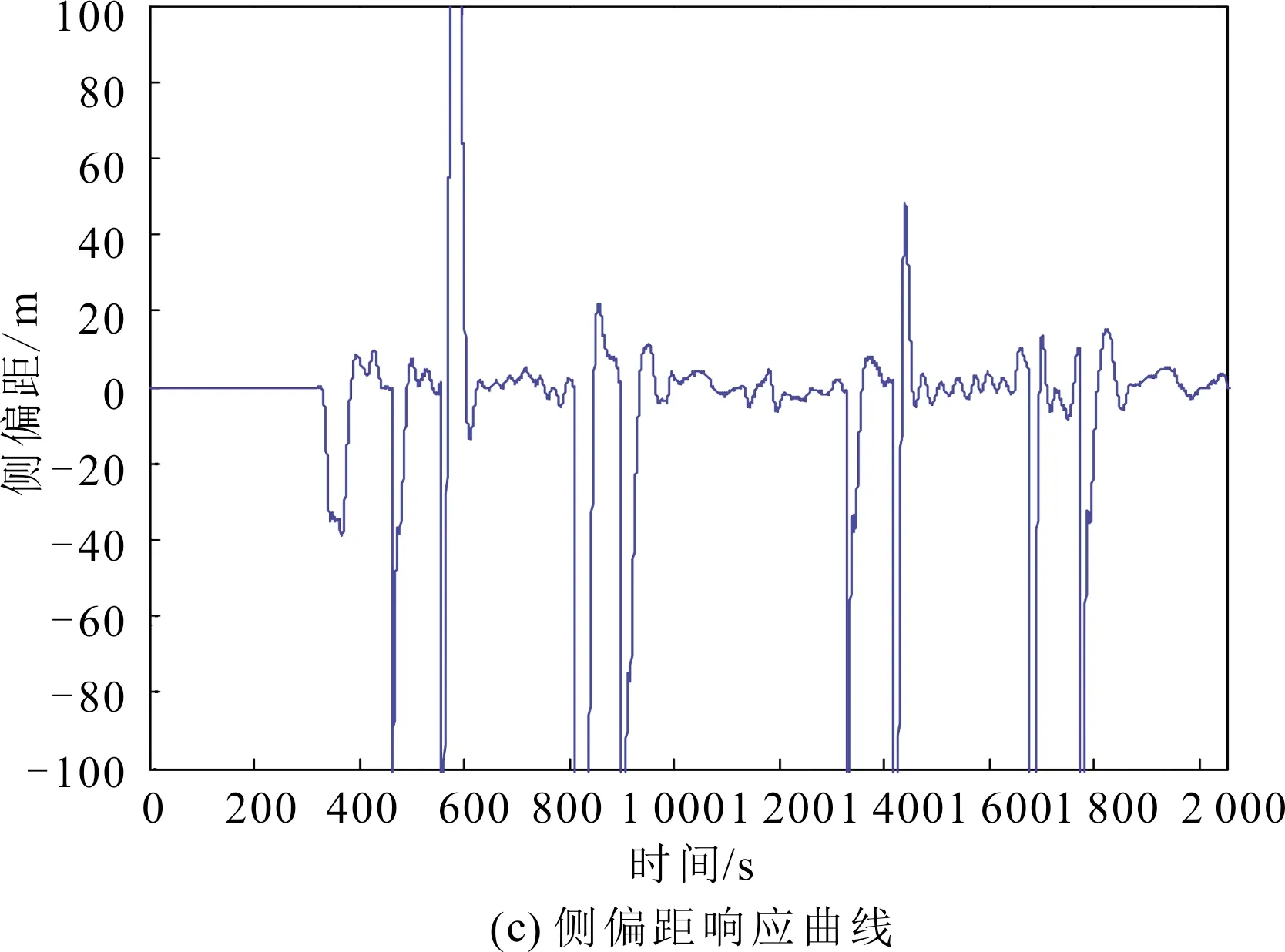
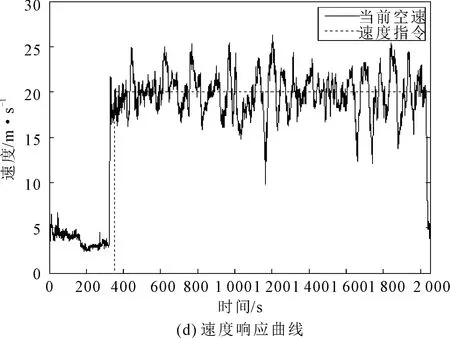
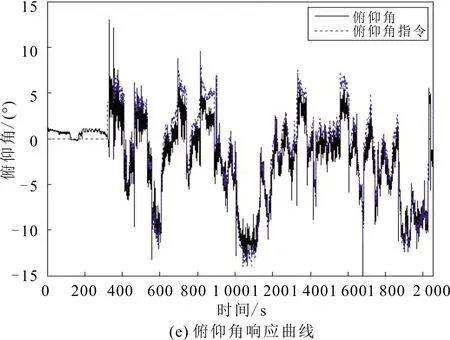
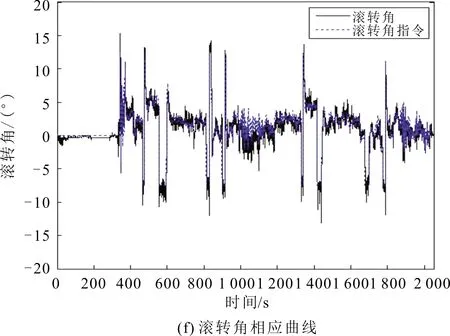
图15 实飞数据结果
4 结语
针对样例自旋翼无人机建立了相应的动力学模型,通过特性分析得出其横侧向存在干扰。根据样例自旋翼无人机自身飞行模态以及控制问题与要求,设计了直飞与转弯两种模态下横侧向控制策略以及控制律。仿真及实飞验证结果表明,所设计的飞行控制策略及控制律可行、有效,满足飞行要求。
