一种应用于海上浮标的相控阵卫星通信前端
2021-06-18谌德军梁显锋安军社
谌德军,梁显锋,饶 浩,安军社
(1.中国科学院 国家空间科学中心,北京 100190;2.中国科学院大学,北京 100190)
0 引 言
海上浮标作为一种经济适用的海洋监测设备,能长时间在海上搜集水下信息,完成远海数据传输任务[1⁃3]。浮标水下载荷采集到的数据经编码、调制后,通过卫星通信前端放大、滤波并传输给中继卫星,再由中继卫星传回到地面站,此通信链路为返向链路。地面站的远程指令经中继卫星传输给浮标,卫星通信前端将接收到的指令信号进行滤波、放大,然后输出到中继通信机做进一步处理,此通信链路为前向链路。笔者所在团队前期研制了一款应用于海上浮标的卫星通信系统[4],其通信前端采用固态功率放大器与机械扫描天线相结合的方式。在高海况条件下,多次出现地面站接收数据丢包,甚至返向链路通信中断的问题。机械扫描天线受限于伺服转台的转速[5],难以在复杂海况下实时捕获跟踪卫星信号。此外,伺服电机长时间运转会导致转轴磨损,可靠性降低。
针对上述问题,本文研发了一款小型化、低成本和高可靠的相控阵卫星通信前端。采用有源相控阵天线取代固态功率放大器和机械扫描天线,利用相控阵天线的电扫描特性[6],在复杂海况下快速捕获跟踪卫星信号,建立稳定的卫星通信链路。本文介绍了相控阵卫星通信前端的系统设计方案,阐述了通信前端的实现技术,并给出了测试结果。
1 系统方案
1.1 特性分析
为避免相控阵天线在波束扫描范围内出现栅瓣,天线阵元间距须满足:

式中:d x和d y分别为相控阵天线x方向和y方向的阵元间距;λmin为天线频带内的最小工作波长;θmax为波束最大扫描角。当θmax=60°时,d x≤70.5 mm,d y≤70.5 mm。综合考虑天线效率和工程化实现,选取d x=d y=70 mm。
相控阵天线需安装在Φ520 mm的天线罩内,若采用6×6矩形阵列布阵,天线口径为594 mm,超出了天线罩的内径。因此去掉四个角的阵元,留出适当空间安装GPS天线,此时天线口径为505 mm,满足安装尺寸要求,天线阵元数确定为32。
1.2 实现方案
S频段相控阵卫星通信前端系统框图如图1所示,主要包括32阵元阵列天线、32通道TR组件、32路功分馈电网络、波束控制处理系统以及二次电源变换电路。
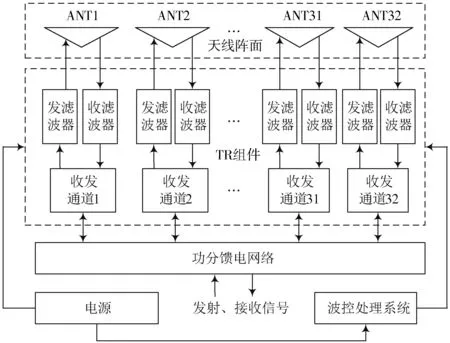
图1 32阵元相控阵卫星通信前端系统框图
为实现卫星通信前端的小型化,阵面天线采用微带天线进行设计。卫星通信前端在向卫星发射信号的同时,也在接收卫星下传的信号,为全双工通信系统,需考虑接收信号与发射信号之间的相互干扰。发射通道输出端和接收通道输入端滤波器均采用腔体滤波器结构,能有效抑制功率放大器输出谐波以及带外调制频谱,避免发射信号泄露对接收通道产生干扰。波束控制系统控制TR子单元中的多功能芯片,完成收发信号的相位和幅度调节,获得理想的空间合成波束。二次电源变换模块将外来24 V一次电压转换为TR组件和波束控制系统所需的工作电压。TR组件与微带天线通过SSMP连接器实现射频信号的垂直互连[7⁃8],各模块以叠层形式实现物理互连,外壳采用高导热性金属复合材料,整机通过金属支架与天线罩金属底座相连,实现良好散热。
2 关键技术实现
2.1 TR组件设计
为实现TR组件的小型化,发射单元和接收单元均采用多芯片集成套片的设计方案。将发射子单元的多功能芯片、温补衰减器、驱动放大器以及末级放大器集成为一个套片;将接收子单元的低噪声放大器、温补衰减器以及多功能芯片集成为一个套片。简化了外围电路,减少了电路面积,并优先采用国产射频芯片进行设计,降低了成本。
2.1.1 发射子单元集成化设计
一组发射组件包括4个发射子单元,发射子单元主要由四功分器、多功能芯片、增益放大器、功率放大器以及腔体滤波器组成。组件将输入射频信号通过增益放大器放大后输入四功分器,再由四功分器将射频信号分配于各个发射子单元中,射频信号在子单元中经多功能芯片移相调幅,并由驱动放大器以及功率放大器放大后,最终由腔体滤波器滤波后通过天线发射出去。发射链路结构如图2所示,指标分配表见表1。
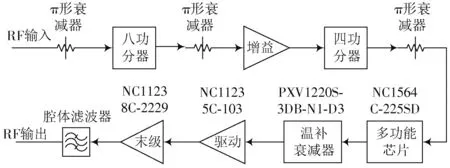
图2 发射链路结构图
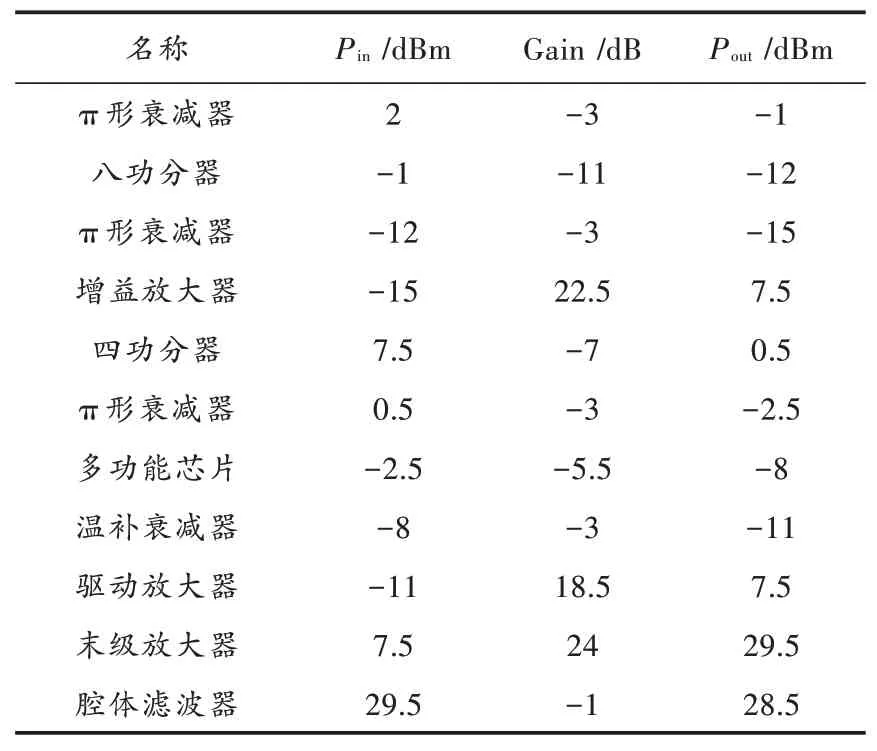
表1 发射链路指标分配表
图2 中的π形衰减器起到级间匹配的作用,改善功分网络的输入输出驻波。温补衰减器用于补偿信号因温度变化引起的幅值偏移。末级功放采用GaAs器件,饱和输出功率为29.5 dBm,链路设计中将末级功放推至饱和状态。腔体滤波器的带外抑制度优于-70 dBc,能有效抑制输出谐波信号。
2.1.2 接收子单元集成化设计
一组接收组件包括4个接收子单元。接收子单元主要由腔体滤波器、低噪声放大器、多功能芯片以及四功分器组成。组件将输入射频信号通过腔体滤波器滤波后送入低噪声放大器,放大后经声表滤波器送入四功分器,再由四功分器合路,合路后再由两级低噪声放大器放大后输入八功分器,八功分网络合成后由射频公共口输出。接收链路结构如图3所示,指标分配表见表2。
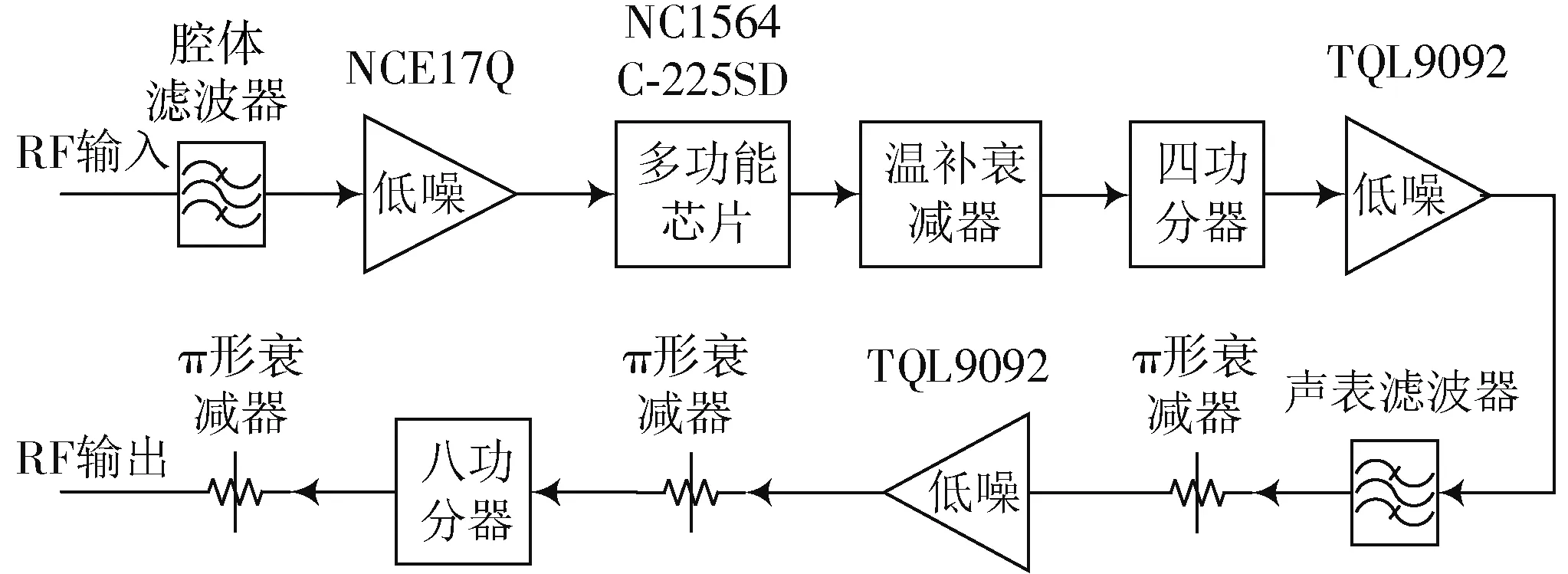
图3 接收链路结构图
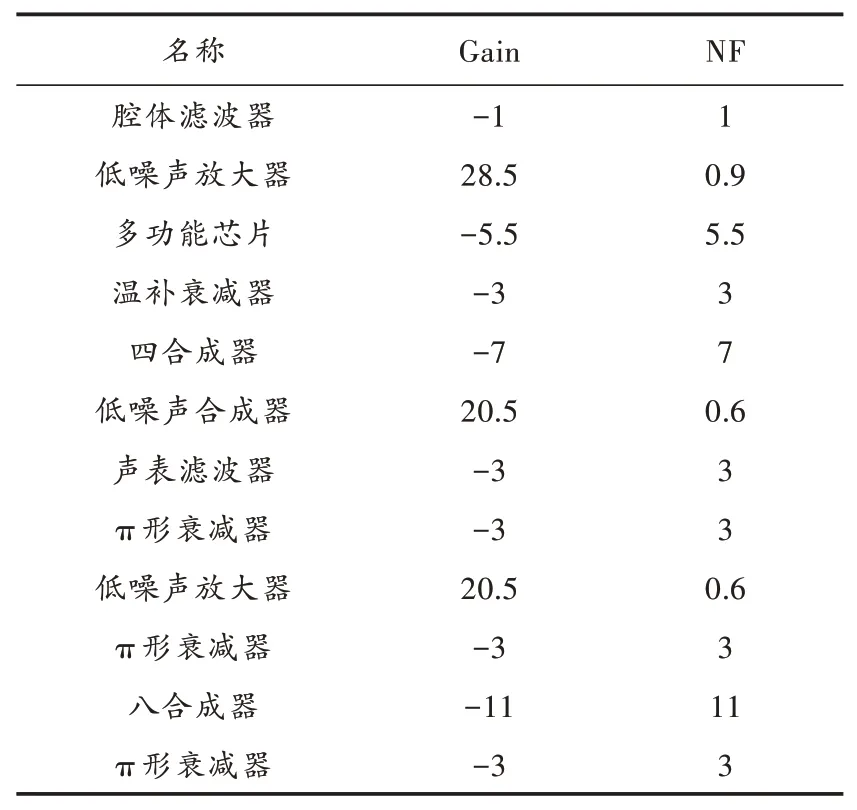
表2 接收链路指标分配表 dB
接收链路中π形衰减器与温补衰减器的作用与发射链路相同。腔体滤波器的带外抑制度优于-70 dBc,能有效抑制发射信号,避免发射信号对接收链路产生干扰。根据式(2)可得[9],接收链路的噪声系数约为2.1 dB,链路增益为30 dB。

式中:F i为接收链路各级噪声系数;G i为接收链路各级增益。
2.2 微带天线设计
为满足系统200 MHz的带宽要求,采用双层微带天线形式设计,可有效拓展天线带宽。天线辐射单元采用双极化馈电,天线通过极化电桥实现双圆极化。这种形式天线的辐射单元和极化电桥能够实现有效隔离,扫描过程中天线单元之间的互耦对TR组件影响较小,可以有效提高辐射效率,适合形成大规模阵列。通过内置空腔和组合贴片等方法可以获得足够的带宽和增益指标。阵面天线采用6×6矩形切角阵列(共32单元)进行设计,同时在阵面旁放置GPS天线,仿真模型如图4所示。阵列天线扫描角度增益如表3所示。
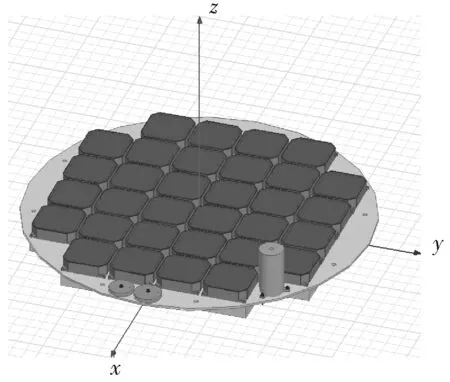
图4 天线阵面仿真模型
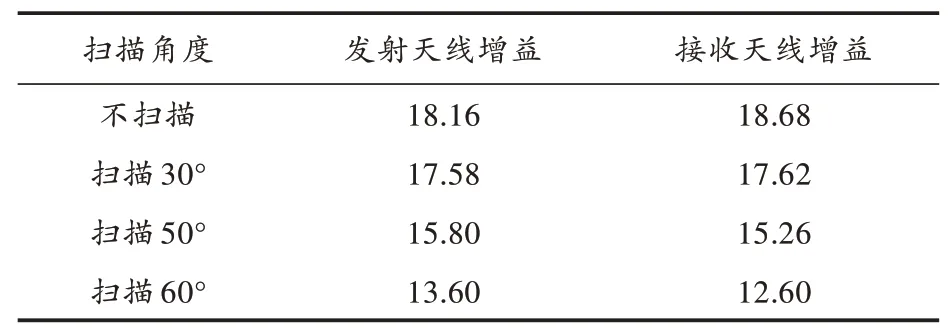
表3 阵列天线扫描增益 dB
2.3 波控系统设计
波束控制电路的核心芯片为CLPD和FPGA芯片,采用1片FPGA芯片和3片CLPD芯片控制32个TR子单元。相控阵天线在捕获跟踪卫星信号时,GPS/AHRS组合导航系统将实时获取的天线位置以及姿态信息通过FPGA解算单元进行坐标解算,计算出相控阵坐标系下的波束指向方位角。解算单元将波束指向方位角传输给波束控制单元,获取FLASH存储器中各阵元在阵面坐标系下的坐标和校正码。根据式(2)计算出各阵元所需的移相值,将各阵元的移相值转化成对应的相位控制码,相位控制码与校准码组合形成波束控制字,通过FPGA的SPI串口传输给CPLD进行串并转换,再下发给各阵元的多功能芯片,控制波束对准卫星。

式中:X i为第i阵元中心的横坐标;Y i为第i阵元中心的纵坐标;φ为合成波束扫描方位角;θ为合成波束扫描俯仰角;λ为发射或接收信号的波长。
这种基于FPGA的波束控制系统具有算法简单、运算速度快的优点,可缩短天线波束指向卫星的时间。相较传统基于信标的波束跟踪方法[10],这种方法对卫星信号的捕获跟踪时间更短,卫星通信链路更可靠。
3 天线测试
3.1 校准测试
有源相控阵天线有32个阵元,各阵元模拟器件的幅相误差相互叠加,会导致天线各阵元间的幅相一致性变差。通过暗室校准测得各阵元间的幅相误差,并通过移相衰减多功能芯片进行补偿,可使天线各阵元的幅相一致性优化,压低旁瓣,提高波束的指向精度,优化天线的性能[11⁃12]。考虑工程实现的复杂度与测试精度,采用中场校准法进行校准测试。为减小校准误差,采用多次校准取平均值的方法。
测试链路连接示意图如图5所示。
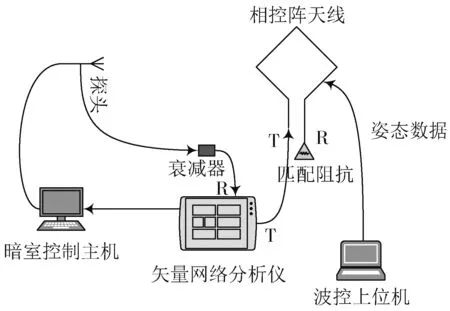
图5 校准测试链路图
通过移动探头完成32阵元的初始幅度和相位测试后,以幅度最小、相位最超前的阵元为基准,生成校准表,将校准表导入FLASH中。FPGA波控程序调用校准表,通过多功能芯片对各阵元进行幅度、相位补偿,使各阵元幅度、相位近似相等。
多功能芯片的衰减位数为4位,步进为0.5 dB,阵元最大衰减值为0.5×( 24-1 )=7.5 dB。各阵元的幅度补偿原则如下:

式中:i为阵元编号;φfeed(i)为第i阵元实际衰减值;φ(i)为第i阵元测试幅度平均值;min(φ)为各阵元中幅度最小值;round函数用于四舍五入取整。当所需衰减值超过7.5 dB,则取7.5 dB。
多功能芯片的移相位数为6位,步进为5.625 dB,阵元最大移相值为5.625×( 26-1 )=354.375 dB。各阵元的相位补偿原则为:

式中:i为阵元编号;αfeed(i)为第i阵元实际移相值(单位:(°));α(i)为第i阵元测试相位平均值;min(α)为各阵元中相位最小值;round函数用于四舍五入取整。
多功能芯片的数字移相、衰减功能存在量化特性,实际移相与衰减值和所需值不同,会引入量化误差。由式(4)和式(5)可知,衰减量化误差≤0.25 dB,移相量化误差≤2.8°。在各阵元相位和幅度量化误差呈均匀分布的情况下,有无量化误差时阵列法向方向图的仿真结果对比如图6所示。两种情形下的阵列法向方向图基本重合,校准过程中存在的量化误差对天线方向图影响甚小。
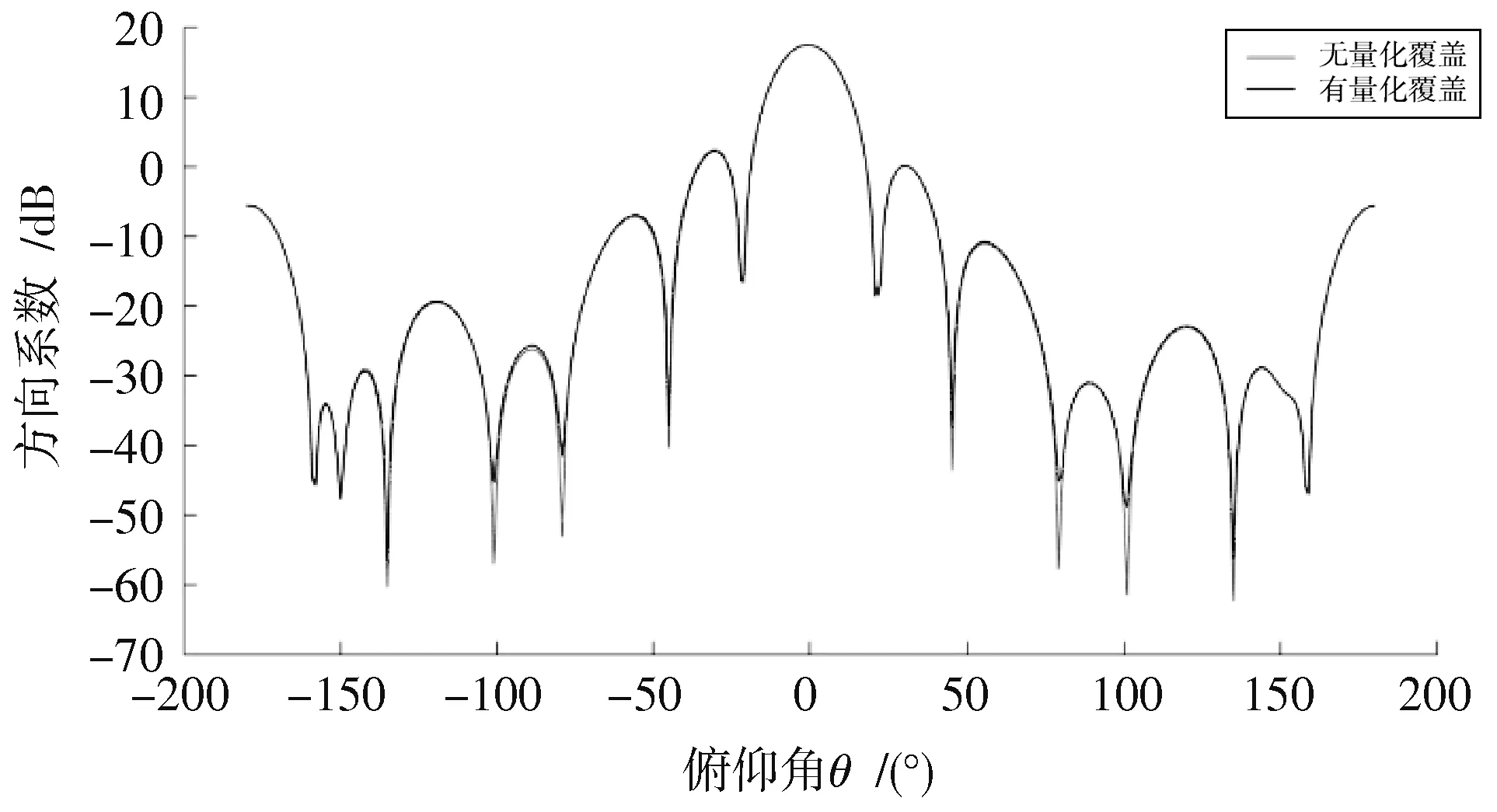
图6 有无量化误差的阵列方向图对比
3.2 性能测试
采用球面近场测试方法完成天线方向图扫描[13]。为对比校准前后的方向图特性,在初始状态的方向图测试完毕后,利用波控上位机软件导入校准表,测试导入校准表后的天线方向图。发射与接收校准前后辐射性能如表4和表5所示。
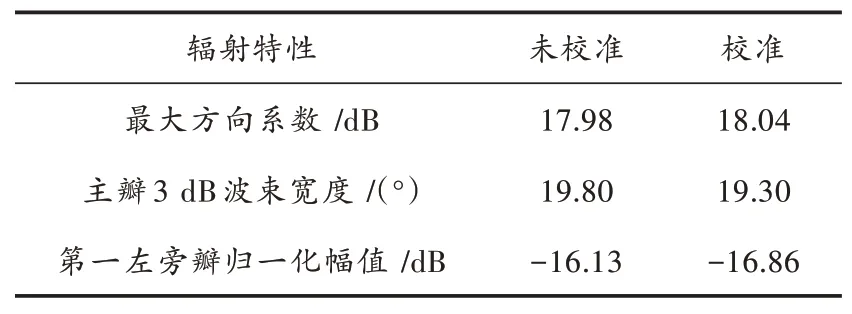
表5 接收方向图俯仰45°,方位0°辐射特性对比
由表4和表5数据可知,天线校准后,方向系数有所改善,旁瓣抑制度增大,主瓣波束宽度变窄,方向性变好。
4 试验结果
应用于海上浮标的相控阵卫星通信前端实物图如图7 所示,其关键性能指标如表6所示。
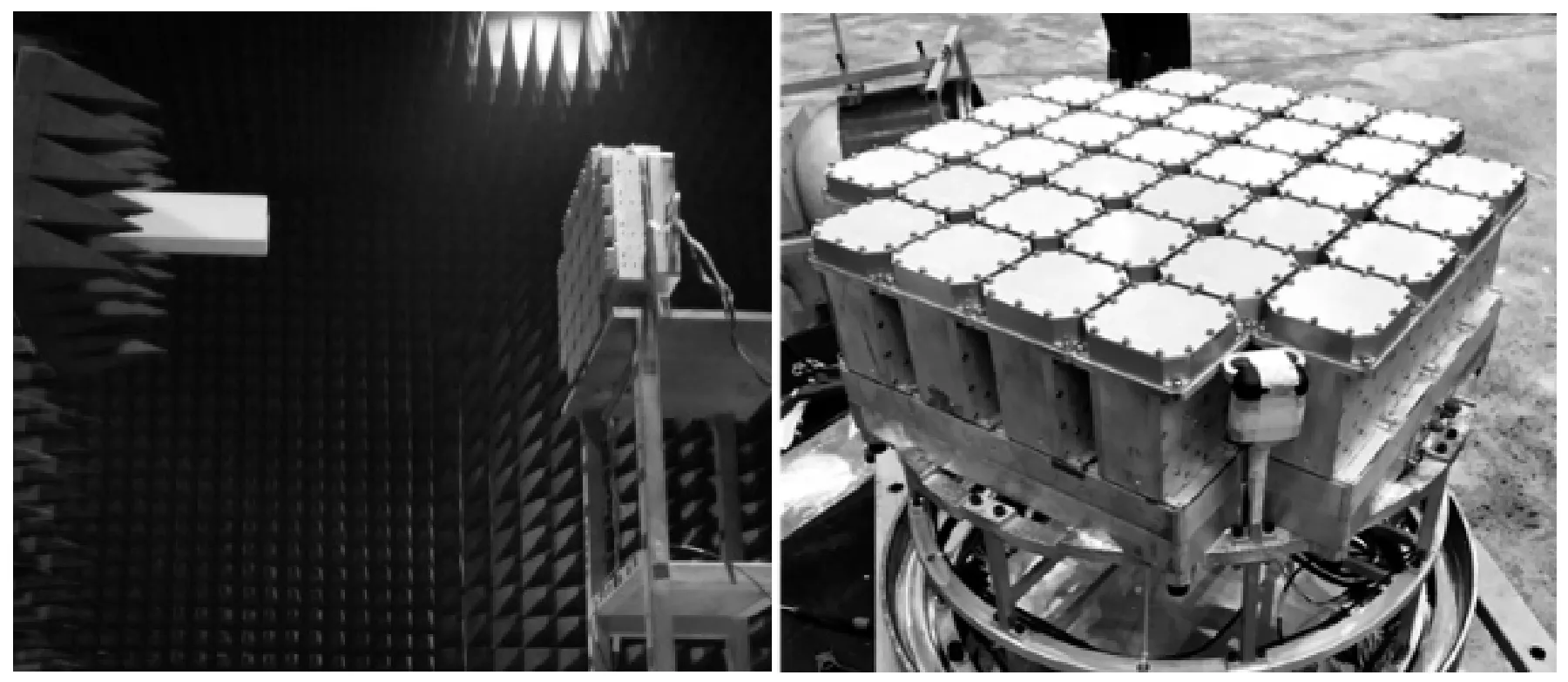
图7 S频段相控阵卫星通信前端实物
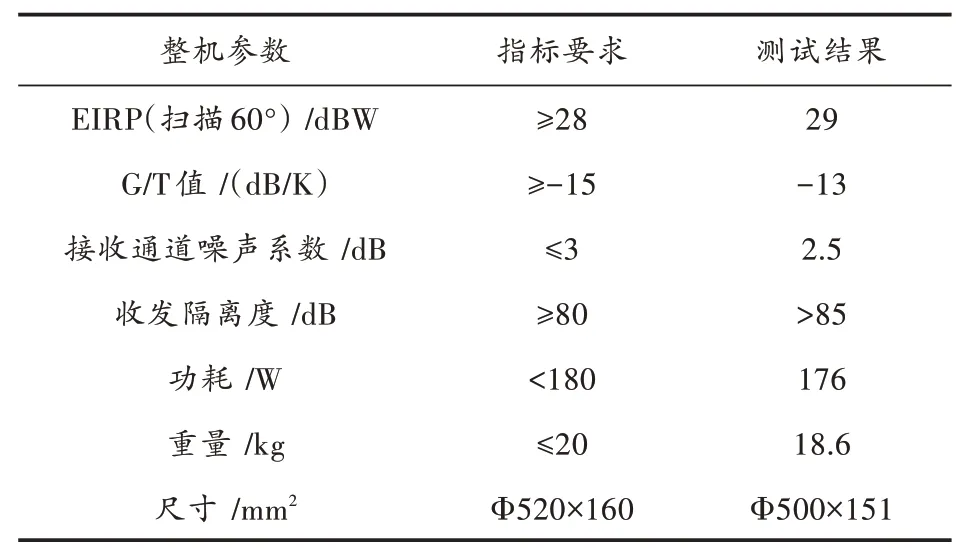
表6 相控阵卫星通信前端关键指标
由表6可知,相控阵卫星通信前端性能指标满足设计要求。在北京地面站完成对星试验后,随试验船去南海进行海试,完成了四级海况下浮标到地面站1 Mb/s高速率的实时数据传输试验,同时实现了地面站对浮标的实时远程指令控制。试验期间,地面站接收到的返向链路信号信噪比在11~14.5 dB之间浮动,比所需门限值高出3 dB以上,通信链路传输误码率小于10-5,满足实际应用需求。地面站实测某段时间的返向累计误码率如图8所示。
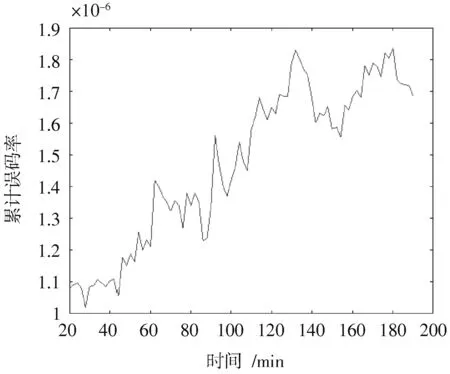
图8 返向链路累计误码率
5 结 语
本文设计了一种应用于海上浮标的相控阵卫星通信前端。采用多芯片集成套片技术提高了TR组件的集成度,采用双层微带结构提高了天线的带宽和增益,采用基于FPGA的波控算法实现了卫星信号的快速跟踪。实测相控阵天线整机满足设计指标要求,利用我国现有中继卫星资源,完成了海上浮标到地面站之间的实时通信试验。试验结果表明,该相控阵卫星通信前端具有小型化、低成本和高可靠的优点,能满足海上浮标在复杂海况下与地面站进行可靠通信的应用需求。
