新型机电一体化运煤机械手的PLC 控制设计的分析
2021-06-16李舒帆徐胜
李舒帆,徐胜
(佛山市三水区理工学校,广东佛山,528137)
1 运煤机机械手基本工作原理
搬运机械臂的基本构造见图1。

图1 运煤机机械手结构示意图
搬运机械手的基本工作流程是:搬运机械手通过伸缩大臂液压缸,对大臂起到带动作用,使大臂相应地上升或下降;小臂在小臂液压缸的带动下,把装货机器人的手腕放在需要的位置。基于这个原理,可以通过使腕部伸出的液压缸在一定程度上驱动腕部,来完成抓拍的基本操作。动臂的液压缸如此收缩时,动臂就会产生特殊的驱动作用,相应地起升落。当当前臂液压缸收缩时,前臂与输送机器人腕带有对应的推进作用。这时,将腕部液压缸拉出,完成基本的煤洞工作。搬运机械手需要循环重复地进行上述抓煤和放煤动作,借助PLC 编程可实现对这一系列循环动作的有效控制。
2 运煤机机械手机械系统设计
■2.1 手部结构设计
指与物体接触的部位。按接触物体的形状,手可分为握力和吸力两大类。为提高机械手的多功能性,可对机械手的结构进行互换。若夹紧的工件为柱形刀架,则使用机械手的手来完成其它工作。制作方便,可广泛应用于各种场合。夹持型工件结构复杂,对夹持型工件直径波动较大的工件,其夹持型工件直径波动对工件轴线位置无影响。指状结构依赖于物体表面的形状、外部轮廓或孔洞,以及物体的重量和尺寸。常用来制作扁平、成型、弯曲手指,有外支架、内基座、两指。有不同类型的动力传递结构,如滑杆、楔杆、齿轮齿条、弹簧杆等。
■2.2 手臂结构设计
臂是操作手的主要部分,同时也是支撑手和手腕的关键部位,手和手腕是手握的对象。双手的作用就是握住物体,并按给定要求将其移至指定位置。该机械手的手臂有4 个自由度:伸展臂和收缩臂,根据固定工件的要求,抬起前臂,从一边转向另一边,并抬起立柱。上肢的构造应该尽可能轻,以达到灵活、快速的移动。节省材料和动力,同时减小运动冲击,二是要有足够的刚度以保证运动精度和定位精度。机械臂结构设计的重点是驱动力和偏重力矩的计算。
■2.3 基座结构设计
底座是操纵器的底座,并且操纵器的各种部件和驱动系统都安装在支撑操纵器全部重量的底座上。本发明结构刚度好,占用空间小,操作维护方便,造型美观。底座按其形状可分为土型、悬吊型、固定型、动动型、步态型。不管形状如何,操作人员在工作时必须固定底座。而在具体的机械臂中,前部和控制的部分一般都是分开进行设置的,使得底座比较简单或者没有。一般的机械手柄上,齿轮箱通常位于机架的内部或背面,控制单元位于底座的背面或独立的控制箱内。在教学实验平台上使用的机械手,可在一定程度上具有多功能,为了使模型和控制单元分离开来,还需要有偏心位置,以防止振动,延长机械手的寿命。
■2.4 驱动系统设计
机械臂的传动系统是驱动作动器移动的传动装置。气动驱动在工业机械手特别是高速机械手中有着广泛的应用。为了保证传动系统的定位精度,工作稳定,维护方便。
3 运煤机机械手PLC 控制原理
运煤机械手PLC 的控制原理是:作为输入信号的行程开关等相关信号通过输入端输入到PLC。在收到输入信号后,PLC 程序进行相应的处理,通过输出端输出经处理的信号,这些输出信号主要用来控制煤机机械手液压系统电磁阀的电磁铁。
4 PLC 控制硬件及软件设计
■4.1 PLC 的应用设计步骤
(1)在PLC 中分配输入输出设备,也就是决定哪些外设是发送给PLC,哪些是从PLC 接收的。而PLC 的输入和输出是与相应的PLC 相对应的。
(2)用PLC 程序绘制梯形图。阶梯状图体现了按一定顺序所要求的全部功能及其相互关系。
(3)采用计算机直接编程实现PLC 的梯形图。
(4)进行调试仿真和现场调试。
(5)储存已完成的计划。
很明显,在建立PLC 控制系统时,首先要确定系统所需的输入、输出量,直至达到控制要求。
■4.2 PLC 的选择
PLC 按输入、输出点和 CPU 功能分为大、中、小三类。按其结构可分为集成 PLC 和模块化 PLC。有许多类型的 PLC。S7-200 由德国 SIMATIC 公司开发,是最近几年的S7。两百多个高性能小型 PLC,灵活的、可互换的系统配置,大量的特殊功能模块可供选择,每一个独立模块都进行了整体组合,实现了扩展,功能强大,使用方便。机械臂控制系统采用CPU224S7-200 系列产品。可编程控制器集成数字式输入/输出,14 个输入,10 个输出,布尔基位运算执行时间0.22 微秒,存储容量8 KB。此外,本系统还具有6 个30 kHz 单相高速计数通道和2 个20 kHz 高速脉冲输出通道,能够接收编码器发出的信号并直接控制步进电机。具有模拟输入输出、高速计数器、位置控制、数据输入输出、通信等功能模块,可实现模拟控制、位置控制、网络等功能。
■4.3 控制系统输入输出设备以及IO 点确定
输入器是产生输入控制信号的装置,控制系统主要包括信号开关、磁近开关和用于刀库的同步编码器。执行机构由PLC 输出信号驱动,机械手控制系统的输出机构为电磁阀、环状分布管、气动回路的工作状态指示器。
■4.4 控制系统硬件
(1)PLC 配置
这个控制系统需要12 个输出点,所以应该增加数字量的输出。选配一套EM222 数码输出模块,增加8 个输出。程序和数据存储空间为13 字节。可实现6 路30 kHz 独立计数。整块输入/输出接线板易于拆卸。换言之,这是一个有很强转向能力的控制器。这个200 系列的强大功能允许您实现复杂的控制功能,不管它们是单独运行的还是与网络相连的。所以S7-200 系列的性价比非常高。

图2 煤机机械手运行方式示意图
(2)旋转编码器
旋转式编码器一般分为增量式和绝对式。编码器当前位置的读数是以0 标记开始,由计算脉冲的增减来决定。即便是读入绝对编码器的当前位置,也需要读入编码器输出。很明显,只有一次转读取每个位置的输出代码。当设备被关闭时,当设备被打开时,绝对编码器的测量值仍然在其当前位置。不过,增量编码器不一样,当前的度量已经为零。刀盘绝对角位置是刀库中非常重要的参数,它与所选刀具的正确性密切相关,因此在本场合中一般采用绝对型编码器。考虑到成本,在上述因素的基础上,360 脉冲/转分辨率高,既可实现本系统,又可节省成本,但PLC 编程必须解决三个关键问题:
①在每一控制系统上电后的第一次PLC 扫描周期内,编码器的读数必须能够恢复为断电前的数据,每一断电前的状态必须能够被保存到断电记忆寄存器中。
②一定要有清除编码器读数与刀盘实际转角累积误差的功能。
③重要的是要注意,PLC 程序应该具有一种功能,使高速计数器在被控对象断电时能够找到标准的参照点,参照点可以是零位或一个常数。
■4.5 PLC 编程
(1)程序编制
程序设计通常分为以下三步:
①根据被控对象控制要求设计;
②按不同功能说明的梯形图编程;
③把编写好的程序加载到PLC 的RAM 中,调试程序。
(2)回原点程序
操作者必须在系统启动时执行返回操作。选择直线轨道上的一个点作为参考点,可以得到坐标系,该坐标系为控制的实现提供了参考系。因为FX2N 系列没有特殊的参考命令,所以采用三菱 PLSY 脉冲输出命令来实现参考过程。Y2 控制伺服电机输出端的旋转方向。若电机在起动时在测试过程中沿与原点相反的方向运动,将Y2 转换为Y1,使电机在起动时向原点运动。这个程序的循环速率应该是800 Hz,DO是用来存储输出频率的,D1 是用来存储系统开机时的输出脉冲数,M8002 是发送脉冲的,K800 是用来写 DOD1 的。将M3 设置为Y002。这时,PLC 的Y0 输出端口开始发出频率为800 Hz 的脉冲,使x 轴返回原点。当边脉冲收到定位提升指令时,M3 被复位,D8140 被设置为0,脉冲输出完成标记M8029 被设置为M3 复位,D8140 被设置为0,原点操作完成。
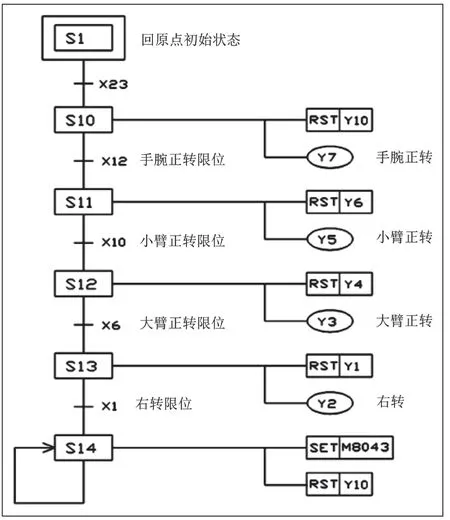
图3 回原点方式顺序功能图
(3)手动操作程序
如使用手动模式,请不要按下下/自动按钮。此时,系统控制接管微动模式,每一个对应的手动启动按钮控制机械手的相应操作。按压按钮时,相应执行部件相应的动作,直到到达行程开关,或者在运动结束时释放按钮。手工按键包括 X 轴左移、X 轴右移、Y 轴后移、Z 轴上移、Z 轴下移和“手动松开”。
为保证系统安全运行,在手动程序中对软件进行了必要的锁定,以避免操作错误。举例来说,操作者可以通过限制Z1 在 Z 轴上的位置来左右移动X 轴和 Y 轴。也就是说,通过设置Z1,可以驱动伺服马达轴向移动。机械手的抽、开动作均由电磁阀控制。按压吸气按钮后,PLC 的Y11 输出端口会复位,电磁阀CY2-1 控制吸气,吸气完成。当按压机械手时,将 PLC 的Y11 输出复位,关闭相应的CY2-1 电磁阀,释放机械手的气动吸盘。
■4.6 PLC 编程时应注意的问题
(1)通过对机械臂的运动速度进行优化控制,并考虑是否会产生惯性冲击或振动;
(2)机械臂与加工工件设备的动作应协调一致,保证机械臂在抓取工件时与工件设备分别动作,减少时间浪费;
(3)当写程序时,应该尽可能地用子程序来写模式,给它起个真正的程序名,最好在主程序段添加注释行,以便于将来检查程序。
5 总结
本文所设计的运煤机机械手有很强的专用性,而且具有安装调试方便,操作简单,维护方便等优点。考虑到矿山作业条件和运输行业本身的特殊性等相关因素,同时为了有效地控制设备更新费用,提出了整体性小型可编程控制器,对于每个控制点安装的行程开关信号,主要是借助可编程控制器的处理器进行实时监控,并对信号进行分析,以达到设定好的程序为基础,对设备的运行状态进行监控,保证预期目标的顺利实现。
