托卡马克实验装置的实验大厅移动辐射监测机器人设计
2021-06-14吴欣扬陈玉庆谢远来胡纯栋
吴 斌,杨 振,吴欣扬,陈玉庆,李 军,谢远来,胡纯栋
(1.中国科学院等离子体物理研究所,安徽 合肥 230031; 2.安徽省合肥市第九中学,安徽 合肥 230001)
聚变能是最具希望解决人类未来能源需求的终极能源,托卡马克磁约束聚变装置则最有可能实现聚变能商业应用。在托卡马克装置运行期间,高温聚变等离子体会产生大量的聚变中子、 γ射线以及高能硬 X 射线辐射,确保周边环境和人员的电离辐射安全是聚变能开发研究中的重要环节。全超导非圆截面托卡马克装置(experimental advanced superconducting tokamak, EAST )是我国独立设计、建造,并于2005年成功投入实验运行[1-3]。主要开展氘等离子体放电实验,每年运行4~6个月。采用脉冲放电运行模式,每个脉冲持续时间约10 s(长脉冲运行模式已超过400 s),每天约进行100次脉冲放电实验。除托卡马克装置本身欧姆场加热外,已建成的辅助加热系统还包括低杂波(lower hybrid wave, LHW,源功率10 MW)、离子回旋(ion cyclotron resonance heating, ICRH, 源功率12 MW)、电子回旋共振(electron cyclotron resonance heating, ECRH,源功率1 MW)和中性束注入(neutral beam injector, NBI,源功率8 MW)加热系统,已实现等离子体电子温度超过一亿度,密度大于5.0×1019m-3,以及100 s以上的高约束模放电。
EAST 装置放电运行时会有多种射线产生。在高功率 NBI 注入加热情况下, D-D聚变中子产额已超过1.0×1014s-1。在低密度、逃逸以及放电破裂时,高能逃逸电子会与装置器壁发生厚靶韧致辐射,产生能量高达10 MeV以上的硬X射线。高能硬X射线与装置结构材料发生光核反应,也会产生大量的光致中子。除了高温等离子体内部核反应过程产生的γ射线外,中子在输运过程中与外围结构材料发生非弹性散射或俘获反应也会产生大量的γ射线。为防止实验过程中产生的各种射线对周边环境和实验人员造成影响,EAST主机大厅四周采用1.5 m厚的混凝土屏蔽墙,顶部混凝土屏蔽层也达到1 m。人员以及设备通道大门均采用1.5 m 厚的屏蔽水门[4]。可注入含硼水,进一步吸收慢化后的热中子。在 EAST 装置大厅及周边实验场所的敏感区域,安装了13 组中子、γ剂量率在线实时监测仪,对等离子体放电期间以及实验间隙期的辐射剂量率进行连续测量[5]。为确保实验场所和职业人员的辐射剂量安全,还布设了累积式剂量计,对中子、γ总辐射剂量进行被动累积测量[6]。基于六轮移动救援机器人底盘,研制EAST实验大厅移动辐射监测机器人,搭载X、γ辐射在线监测仪,机器人可利用同步定位与建图技术(SLAM)构建环境地图自主移动或通过高清图像远程控制,将辐射剂量超阈声光和实时剂量率发送给控制大厅内的上位机。此外,移动辐射监测机器人可以对EAST装置大厅内进行连续巡视监测,及时监测发现巡测路径上的剂量率异常,向周围附近的工作人员发出警示报警,确保周边工作人员的辐射剂量安全。
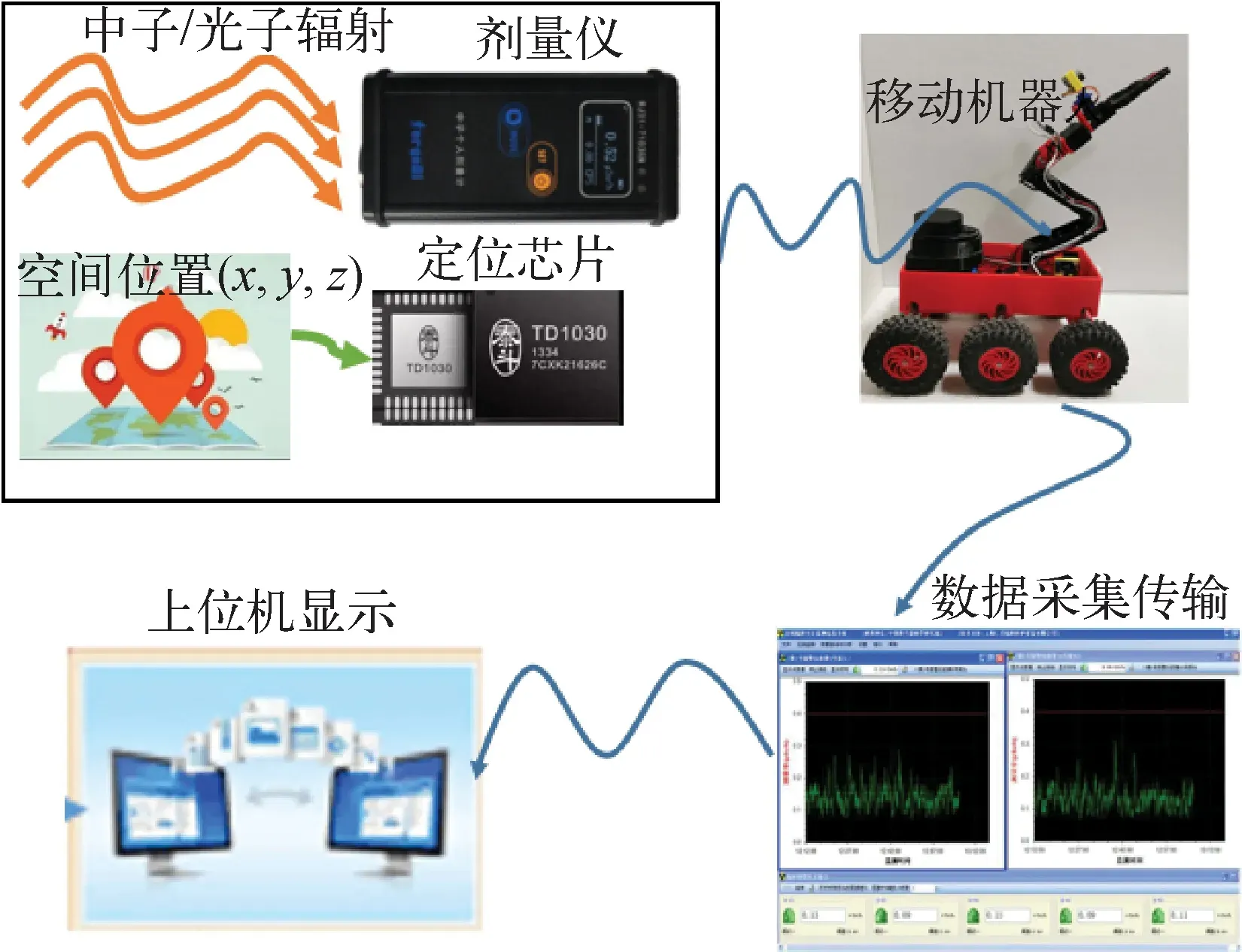
图1 移动式辐射监测设计原理Fig.1 Principle of mobile radiation monitoring
1 设计原理
移动式辐射监测设计原理示于图1。为实时了解不同场所的辐射剂量率,以此判断维修方案与现场滞留时间,利用移动机器人携带中子光子现场辐射剂量仪,同时搭载采集周围环境图像信息的高清图像采集系统,将采集的位置信息与辐射剂量率值通过网络或RS485通讯协议与上位机进行通讯,便于控制人员及时了解大厅内不同位置、不同时刻的辐射剂量率。
2 结构与功能设计
2.1 机器人结构设计
移动辐射监测机器人整体结构示于图2。机器人由车体、机械臂、车载电子设备组成。车体包括车架、悬架、车轮、车厢等部件组成。车体采用六轮驱动,并采用了大扭矩的电机驱动。

图2 移动辐射监测机器人整体结构Fig.2 Overall structure of mobile radiation monitoring robot
移动辐射监测机器人在复杂的地形下有较强通过能力。移动机器人通常采用履带式或轮式底盘,履带式底盘与地面接触面积大,在不平地面上性能较好,稳定性强,越障性能优越,但速度不如轮式快,且能量损耗大,综合考虑轮式底盘在一定程度上可以满足全超导非圆截面托卡马克装置(EAST)大厅地面境对机器人的要求。机器人的车轮设计减震弹性悬挂系统,安装橡胶海绵充气轮胎,在减震弹簧作用下,车轮尽可能与地面接触,提供有效的驱动力。采用六轮驱动,相对于四轮驱动的机器人,六轮驱动的机器人由于驱动轮数目多,即使有少数车轮悬空,仍会有足够数目的车轮可以提供抓地力,可以有效提高在复杂地形下的通过能力[6-8]。
车架采用箱式车架,分3段安装6个独立悬架。悬架采用独立悬架,每一侧的车轮可以单独通过弹性阻尼悬架与车架连接,两侧车轮可以单独跳动,互不影响,保证车轮在复杂地形下有效接触地面,提供可靠的抓地力,以提高机器人在现场的通过能力。悬架由悬臂和弹性阻尼减震器组成,悬架通过轴承和防松螺母与车架连接,保障悬架系统可靠工作。减震器带有弹簧和液压阻尼,并可以调节减震器的弹性,以适应不同的路况要求。车轮由轮胎、轮辋以及联轴器组成。轮胎选用86 mm橡胶海绵轮胎。直径较大的轮胎可提高在复杂地形下的通过能力。机械臂具有5个自由度,采用双轴数字舵机LX-16A,使用串口总线减少了机械臂上的线缆数目,末端执行器采用二指夹爪,机械臂末端安装摄像头,用于近距离观察外界环境。
在机器人的原型设计阶段,大量采用3D打印制造机器人的零部件,大幅度降低了机器人的建造成本,加快了机器人的设计与制造速度,3D打印采用聚乳酸(PLA)热塑性材料,具有良好的拉伸强度和高刚度比,3D打印可一次打印出形状和结构非常复杂的零件,可大幅度降低机械零件的数目和重量,省去大量的螺丝螺母等固定件。通过优化结构设计,在同样动力配置的情况下,增加机器人的动作执行速度,提高机器人的机动性。
采用3D建模软件OpenSCAD开展机器人的机械结构设计,将机器人的主要参数如车体的尺寸、轴距、壁厚等定义为变量,设计过程可以方便地修改这些参数,加快设计优化进度。
2.2 车载电子设备
移动辐射监测机器人系统硬件结构图示于图3。
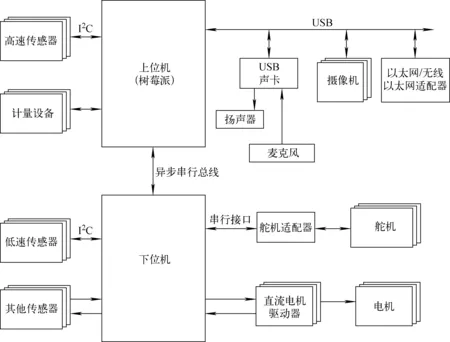
图3 移动辐射监测机器人系统硬件结构图Fig.3 Hardware structure diagram of mobile radiation monitoring robot system
1) 机器人动力。包括6个370减速电机,电机采用高转速大功率的直流电机,工作电压12 V,额定电流350 mA,转速17 000 r/min,输出轴转速500 r/min,额定力矩5 kg·cm。直流减速电机价格便宜,动力强,更适合机器人在复杂路况下的运动。电机驱动采用4块TB6612电机驱动模块,可以驱动6个370电机和2个减速电机,用于驱动机器人的底盘电机和机械手上的电机运动。开发了Arduino扩展板用于连接Arduino Mega 2560和TB6612电机驱动模块、减速电机、数字舵机等器件。
2) 机械臂舵机。采用Lobot智能串口双轴数字舵机LX-16A,由于使用的串行总线舵机采用半双工串行总线,而Arduino下位机只提供全双工串行总线,因此采用和串行总线舵机配套的控制板。通过该控制板,舵机的通信方式转变为全双工模式,以适应Arduino下位机的要求。
3) Arduino。作为机器人系统的下位机,采用Arduino Mega 2560 进行机器人的运动控制。Arduino通过串行接口接收树莓派上位机的指令,使用数字I/O接口控制电机旋转方向、脉冲宽度调制(pulse width modulation ,PWM)控制电机功率,从而控制机器人的运动。通过串行接口对机械臂上的舵机发出指令、获取舵机状态,定时向上位机报告,有效地控制机械臂的操作。
4) 树莓派。采用树莓派3B作为机器人的上位机,主要负责网络通信和图像传输、处理。树莓派3B使用串行接口与Arduino下位机通信,通过支持802.11 n、5.8 GHz的WiFi模块与计算机采用服务器-客户机模式进行通信,传输摄像头图像,接收控制信息。同时树莓派3B提供了4个USB2.0接口,用于连接摄像头,监控机器人周围的环境。
2.3 数据控制软件系统构建
机器人是一种自动化程度很高的机器,具有感知、动作、规划和协同等智能。控制系统是机器人的核心部分之一,控制系统方案的设计直接关系机器人性能要求,是机器人智能的主要表现。
控制系统方案的设计取决于控制对象和控制目标。本文中控制对象为机器人,使机器人按照操作人员的控制命令在复杂的环境中运动,实时传回周围环境信息和自身的状态信息。机器人采用主从式控制系统,操纵端为主控制计算机,车载端为从控制计算机。其中,主控制计算机完成坐标变换、地图创建、人机交互等功能,从控制计算机主要负责采集传感器信息、控制命令收发、底层控制命令解析生成等。主从控制计算机通过无线网络通信和交互。移动辐射监测机器人主要由运动控制子系统、在线辐射监测子系统、自主导航子系统、视频监控子系统、生命探测子系统、声光报警子系统、电源子系统和通信子系统组成。
移动辐射监测机器人系统的软件架构图示于图4。机器人下位机主要用于接收辐射信号和位置信号来源,包括剂量仪器的示数、SLAM 位置图像传输数据、控制机器人的运动轨迹等。机器人上位机主要是工作人员发布指令和接收下位机传输的数据,并进行机器人轨迹和剂量判断,用于现场警报。控制台主要开发数据的可视化显示,并实现探头、上位机和下位机通讯连接等功能。
2.4 移动辐射监测系统
由于EAST中性束注入的束能量一般为30~70 keV。注入时EAST大厅的剂量率可达到10 mSv/h,停机后大厅的剂量率为本底水平。而NBI打靶测试时,其光子的最大能量与束能量相当。故机器人辐射监测系统采用HA1100Med塑料闪烁体X、γ辐射在线监测仪,其能量范围30 keV~3 MeV,响应时间<2 s,可以满足EAST实验大厅光子实时剂量率测量需求。机器人携带的中子探头一般采用He-3计数管加聚乙烯树脂慢化球类型。探头获取的辐射剂量率通过RS485接口与上位机通讯,实现辐射剂量率数据传输。图5为辐射监测用到的光子探头,也可搭配中子探头。

图5 辐射监测探头Fig.5 Radiation monitoring probe
机器人辐射监测剂量率系统与环境自主建图系统配合,完成辐射剂量率超标位置在环境地图中的标定。环境自主建图系统采用基于激光雷达的机器人操作系统(robot operating system, ROS)架构,实现高精度的SLAM。机器人配有Rplidar A1改进版激光雷达,半径扫描范围12 m,可实现SLAM导航应用辐射测量激光雷达SLAM建图(图6)。ROS 为适用于机器人的开源操作系统,它提供了操作系统应有的服务,包括硬件抽象,底层设备控制,常用函数的实现,进程间消息传递,以及包管理。也提供用于获取、编译、编写、跨计算机运行代码所需的工具和库函数。

图6 辐射测量激光雷达SLAM建图Fig.6 Construction of LIDAR SLAM for radiation measurement
环境自主建图系统的软件结构图示于图7。机器人还搭载高清图像传输系统用于机器人的远程操控,红外图像和CO2传感器等生命探测设备用于实验大厅现场工作人员位置确定,确保人员安全。红外热像仪采用MLX90640红外热像仪传感器模块来检测物体。该模块红外接近传感器具有32×24温度格传感器。采用OpenCV处理输入到网络摄像头mjpg-streamer的视频流,可以用于识别二维码位置标志等视频处理。

图7 环境自主建图系统的软件结构图Fig.7 Software structure diagram of the environment autonomous mapping system
3 性能测试
为了测试辐射监测机器人的性能,在非辐射条件下对机器人的控制性能进行测试,分别对移动平台的力学性能、通信性能、续航能力、机械臂控制能力、SLAM建图能力、相机图像采集能力等方面进行测试。测试结果为机器人最大速度为1 m/s,爬坡能力30°,机械臂具有5个自由度,最大伸展臂长45 cm、最大伸展高度45 cm、机械臂底座可以360°旋转,肩关节弯曲角度为150°和肘关节弯曲角度为180°,腕关节可以正负120°滚转、正负90°俯仰。无遮挡的情况下图像距离>300 m,能够控制机械臂运动,相机可以实时获取图像,车体最大负重1 kg,电池续航时间>2 h。
对机器人在各种复杂地形如草地、沙地、拆除建筑工地和大鹅卵石滩地环境中进行测试,验证了机器人具有通过这些复杂地形的强大能力。机器人表现良好,因为采用了六轮弹性悬挂系统。机器人可以有效地与地面接触,即使在大角度倾斜状态也能及时脱困。在RoboCup机器人世界杯救援机器人项目比赛的9个测试地形进行测试,机器人可以顺利地通过这些地形障碍,并且正常完成巡检数据采集。图8显示了机器人在复杂地形环境与RoboCup比赛场地测试情况,这些测试地形的复杂程度都远超过EAST大厅,图9为辐射监测机器人在EAST大厅内的巡检路线。辐射监测机器人在EAST-NBI测试环境进行了初步测试,辐射监测机器人远程操控工作正常,在实验大厅内可正常巡检。

图8 复杂地形环境与RoboCup比赛场地测试Fig.8 Complex Terrain Environment and RoboCup Field Testing

图9 辐射监测机器人在EAST大厅内的巡检路线Fig.9 The inspection route of the radiation monitoring robot in the EAST hall
4 总结
本文基于六轮移动救援机器人底盘,研制了EAST实验大厅移动辐射监测机器人,搭载X、γ辐射在线监测仪,机器人可利用SLAM构建环境地图自主移动或通过高清图像远程控制,系统还搭载红外图像和CO2传感器等生命探测设备,辐射剂量超阈声光报警装置,用于发现警示现场工作人员,确保人员安全。
