带电抢修作业机器人运动控制模型构建
2021-06-10周军伟沈海江李文飞霍凯龙莫建中
周军伟 沈海江 李文飞 霍凯龙 莫建中


摘要:带电抢修作业机器人的运动控制问题,实际上就是机器人的双臂协调控制问题。当机器人双臂同时运动时,如何有效防止双臂避碰是一个必须考虑的问题。本文为防止带电抢修作业机器人双机械臂在作业过程中可能发生的碰撞,在c空间法的基础上,研究带电抢修作业机器人的双臂避碰路径规划问题,进而提出一种改进的A*搜索算法的双臂避碰的协调控制方法,并通过仿真实验,对该方法进行验证,结果表明,该方法可有效实现带电抢修作业机器人双臂避碰协调控制。
关键词:带电抢修作业机器人;运动控制;双臂协调控制
中图分类号:TP242 文献标识码:A 文章编号:1001-5922(2021)02-0098-05
机器人的避障路径规划,即为机器人的运动寻找一条从从始至终不经过任何障碍的路径。这条路径需满足机器人或机器人的机械臂在运动过程中,各关节不与空间内的任何障碍物,包括机器人自身双臂之间发生碰撞。机器人避障作为协调控制的一部分,一直以来是机器人控制研究的热点,也是难点。如何防止双臂的碰撞,很多学者进行了大量研究,如部分学者将机器人运动放到笛卡尔空间坐标系中,并通过空间坐标转换的方式来研究机械臂的运动;部分学者则基于笛卡尔空间,提出了A*搜索算法等在内的机械臂协调控制方法。本研究认为,解决机器人的避障路径规划问题,就能解决机器人双臂的协调控制,实现对机器人的运动控制。对此,本文在c空间法和改进的A*搜索算法的基础上,通过对机器人的机械臂双臂碰撞进行检测分析,并提出一种避障路径搜索方法,以实现机器人避障的最优规划。最后在MATLAB中完成了仿真和分析,验证该方法的可行性和有效性。
1基本方法
1.1 C空间法
c空间法是机械臂避障常见的一种路径规划方法。它将机械臂的实际避障问题,转化为在无障碍区域内寻找起始点和目标点的路径问题。本研究中,以带电抢修作业机器人机械臂的关节角为变量,建立c空间,并设定障碍物空间和自由空间。其中,障碍物空间是障碍物在C空间区域投射,自由空间是除障碍物空间之外的其余空间,空间内的每一个点表示机械臂的一个特定位置。通过建立c空间法,并从自由空间中找到一条不经过任何障碍的路径,就可以实现现实工作带电抢修作业机器人的机械臂无碰撞路径。值得注意是,由于C空间的维数高,计算量较大,因此在进行多自由度的机械臂建模和搜索时,应尽量减少计算量。
1.2改进的A*搜索算法
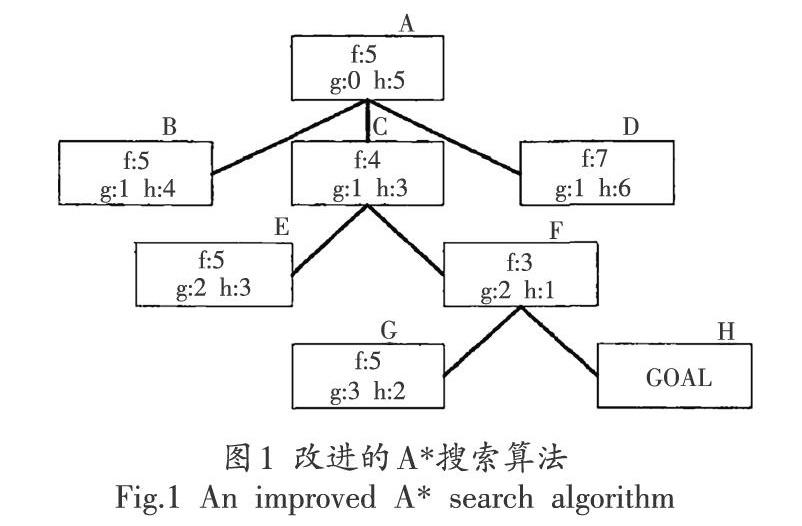
A*搜索算法是常见的路径搜索方法,常用于搜索最短路径,具有灵活多变的特陛。为了使搜索结果更加符合最优路径,本研究对A*搜索算法进行了改进,并利用改进的A*搜索算法实现了对机器人机械臂无障碍路径的搜索。具体原理是在原有A*搜索算法的搜索路径的基础上,增加了多个待选点,搜索路径也从起始点到目标点一条搜索路径变为从起始点到待选点和从待选点到终点多条路径。搜索过程可用图1表示。
图1模拟了一个带电抢修作业机器人机械臂的空间状态。图中,A表示搜索路径的起始点,H表示搜索路径的目标点,B、C、D、E、F、G表示待选点。待选点内的f、g、h分别表示f(n)、g(n)、h(n),数字它们对应的值。n表示待选点,f(n)表示估价函数,g(n)表示第n个待选点的实际代价,h(n)表示第n个待选点到目标点的最佳路径。三者的关系为:
f(n)=g(n)+h(n)(1)
2机械臂双臂碰撞检测
带电抢修作業机器人双臂无碰撞问题,实际上就是无碰撞轨迹规划问题。因此本研究对带电机器人机械双臂碰撞的检测分析,转化为无碰撞轨迹研究检测。同时在研究中,通常设定甲臂在整个规划路径中的任意时刻的位置都是已知的,因此,只需要用C空间对乙臂的路径进行研究。为使研究过程通俗易懂,本研究将带电抢修作业机器人的机械臂的每条连杆简化为一条线段。如图2所示,当两只机械臂发生碰撞时,连杆的两条线段相交,即线段AB和cD相交,即线段AB的两个端点A、B位于线段cD的两侧,或者位于CD线段上。
由图6可知。机器人双臂同时运动时。乙臂仍然可以避开甲臂运动所形成的障碍物,实现了从起始点s到目标点G的无碰撞过程。
通过仿真实验,我们可以得出结论,在不发生碰撞的情况下,本研究设计的甲臂和乙臂的路径规划算法切实有效。
5结语
带电抢修作业机器人运动控制模型构建问题,实际上就是带电抢修作业机器人运动协调控制问题。本文采用c空间法和改进的A*搜索算法对机器人的双臂避障路径进行规划,提出来一种协调机器人双臂免碰撞的控制方法。最后,通过实验仿真证明了该方法的可行性。实验证明,该方法在带电抢修作业机器人的实际工作中避碰切实有效。
