逆变器单神经元自调节PID电流控制策略研究
2021-06-09张科刘刚王秀茹黄华峰韩少华王科龙
张科 ,刘刚,王秀茹,黄华峰,韩少华,王科龙
(1.国网江苏省电力有限公司宿迁供电分公司,江苏 宿迁 223800;2.上海金智晟东电力科技有限公司,上海 200233)
随着能源消耗的日益严重,新能源的开发成为各国首要目标,光伏发电是一种清洁能源发电方式,在光伏并网发电系统中,逆变器主要实现光伏电池板的最大功率点跟踪及进网电流控制[1]。然而在光伏并网中,传统的两电平逆变器已经无法满足要求。由此,多电平技术应运而生,多电平逆变器的思想从提出至今出现了很多拓扑,其中发明较早、使用较多的当属二极管中点钳位型(neutral point clamped,NPC)逆变拓扑,而本文的研究对象是在二极管NPC型三电平的基础上发展而来,改善了所用的开关管较多、开关损耗不一致等劣势。所以,文本的研究对象为T型三电平逆变器[2]。
最常用的并网电流控制方法是基于同步旋转坐标系下的PI控制,该控制方法把三相电网电压、并网电流变换至两相旋转坐标系下,采用PI控制和电网电压前馈控制对并网电流的有功分量和无功分量分别进行调节,实现较为容易,但其在动态的过程中不具备快速调节的能力,特别是在电网发生非正常工况时,还必须增添针对不正常工况的控制方案[3-4]。文献[5-6]采用了比例复数积分PCI控制,该控制方法与PR控制具有相似的数学表达式,可以对并网电流实现无差控制,PR控制没有考虑复数项,而PCI考虑了复数项,稳定裕度较大、动态响应较快,但当电网电压不平衡时,PCI控制无法精确控制并网电流。文献[7]采用滞环控制,该控制方法通过设置滞环宽度,在三相静止坐标系、两相静止坐标系或者两相旋转坐标系下调节系统稳定性,虽然可以实现并网电流准确与快速的跟踪,但是这与模型预测控制一样会有开关频率不确定的固有缺陷,因此会造成滤波器的设计难度增大。
传统的PID调节器通常适用于稳态工况下,能够实现很好的跟踪性能,但是随着给定的变化,传统PID调节器的固定参数不一定能适用于所有工况。本文提出一种将单神经元自调节PID调节器电流闭环控制方案应用于T型三电平逆变器并网系统之中的策略[8-9],用于在光伏发电系统中光照强度随机情况下,能够根据光照强度的大小实时改变电流的大小,从而使逆变器的功率随着光照强度的变化而变化,在复杂的环境下依然能够实现并网电流的快速跟踪。
1 T型三电平逆变器拓扑
图1为本文的控制对象T型三电平逆变器拓扑结构。它是一种二极管NPC型三电平拓扑的改进结构,主要的改进是每一相通过两个反并联二极管的IGBT将逆变器桥口电压控制在直流侧的电容中点,这样就能够实现中点电位的控制。
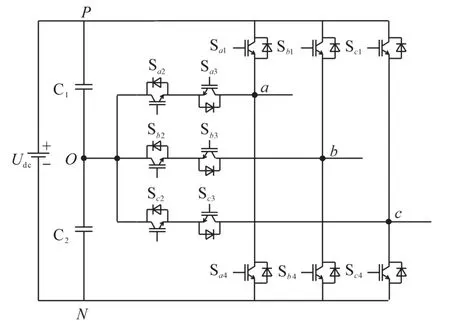
图1 T型三电平逆变器拓扑结构Fig.1 Topology of T-type three-level inverter
以a相为例,对本文的拓扑T型三电平逆变器的工作过程进行简单介绍。从图1中可以看出,a相的结构相当于在两电平逆变器的结构上添加了上、下分压电容,并且两个电容的容值相等。当系统工作时,上、下两个电容上所承担的电压分别是UC1=UC2=Udc/2。而中点与桥口之间添加了两个反并联二极管的IGBT开关管Sa2,Sa3,实现中点对地钳位功能。Sa2和Sa3管子的耐压为Udc/2,Sa1和Sa4管子的耐压为Udc,相比二极管NPC型逆变器增大了1倍[10]。
本文采用的开关管工作方式与二极管NPC型三电平逆变器相类似,即当开关管Sa1和Sa2导通、Sa3和Sa4关断时,a相逆变桥输出相对于零电位参考点O的电平为高电平Udc/2;当开关管Sa2和Sa3导通、Sa1和Sa4关断时,a相逆变桥输出端电平为零电平;当开关管Sa3和Sa4导通、Sa1和Sa2关断时,a相逆变桥输出端电平为低电平-Udc/2。Sa1和Sa3,Sa2和Sa4的触发脉冲互补,为了防止桥臂直通,Sa1和Sa4不能同时导通,4个开关管的工作状态与逆变器输出电平的对应关系如表1所示,即逆变输出相电压有三种电平:Udc/2,0,-Udc/2,分别对应拓扑中的P,O,N三种状态。
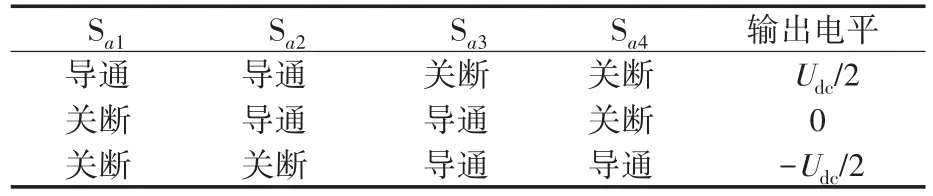
表1 T型三电平逆变器开关状态与输出电平对应关系Tab.1 Relationship between the switching state and output level of T-type three-level inverter
图2为T型三电平逆变器a相的开关时序图,其中ura为a相正弦调制波,uc为三角载波,uga1~uga4分别表示a相4个开关管Sa1~Sa4的驱动信号。由图2可看出,Sa1和Sa3的触发脉冲互补,Sa2和Sa4的触发脉冲互补,遵循上述工作原则。

图2 a相PWM脉冲序列Fig.2 PWM pulse sequences of phase a
2 单神经元自调节PID调节器
单神经元自调节PID调节器的等效过程如图3所示。
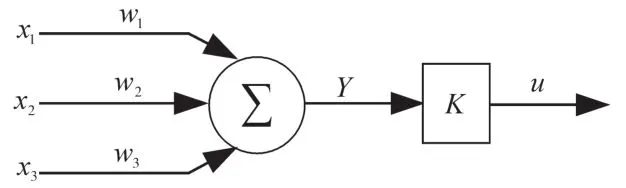
图3 单神经元自调节PID调节器等效模型Fig.3 Equivalent model of single neuron adaptive PID regulator
图3中,K为该过程中的增益值,所以可以得到如下式的关系式:
式中:X为输入向量;W为连接权值向量。
根据式(1)可以得到输出的表达式为

式中:u(k)为输出值。
本文所提方案的基础是单神经元,该方案的优点是具有自调节以及自主学习的能力,因此将上述理论与传统的PID调节器进行组合控制,能够消除传统PID调节器固定参数的缺点。单神经元自调节PID调节过程框图如图4所示。
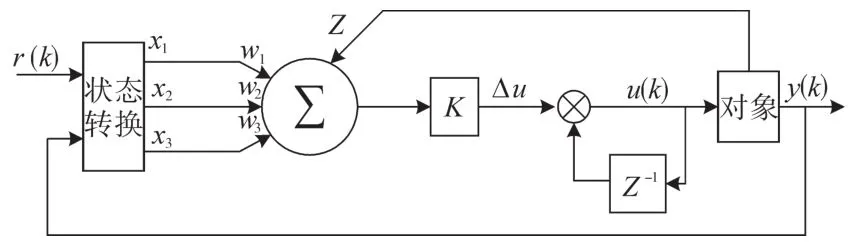
图4 单神经元自调节PID调节过程框图Fig.4 Process diagram of single neuron adaptive PID regulator
单神经元的输入与输出之间的变化关系如下式:
控制量计算公式为

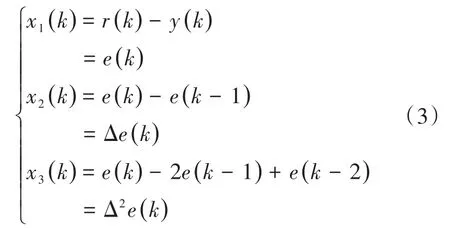
其中,x1(k)类似于传统PID调节器中的积分项;x2(k)类似于传统PID调节器中的比例项;x3(k)类似于传统PID调节器中的微分项。相对于传统的PID调节器来说,本文所提的方案中wi(k)有自主学习的能力,能够根据给定的不同进行实时自主整定,相对于传统的PID调节器参数固定的缺陷,单神经元自调节PID调节器无疑具备更高的优势。
单神经元自调节PID调节器中wi(k)的学习能力是基于某种特定的规律的,系统的差异导致规律的不同,根据实际系统设计不同的学习规律才能够使得本文所提方案的优势最大化。常用的学习规律有三类:无监督的Hebb学习规律、有监督的Delta学习规律和有监督的Hebb学习规律。对于无监督的Hebb学习规律而言,可能会导致连接权值无限增大的问题;对于有监督的Delta学习规律而言,在计算过程中又可能会导致陷入局部极小的问题;而将前两种学习规律结合起来即为有监督的Hebb学习规律[11-12],可根据要求进行自主学习和自调节,是一种适合本文T型三电平逆变器的方案。
有监督的Hebb学习规律如下:

式中:wij为单元j到i的输出值;η为自主学习的快慢,一般是大于0的;di为希望得到的控制量;oi,oj分别为单元i和j的输出值。
将式(5)作为本文的自调节方案的学习规律,可以得到本文输出的表达式为
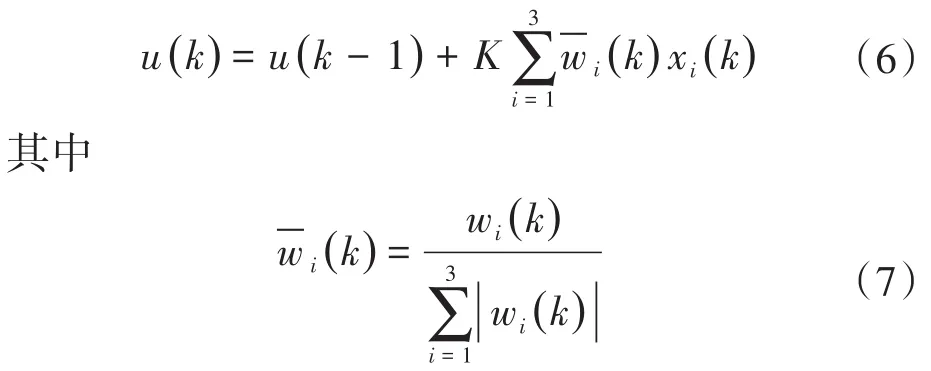
三个权值的更新规律为

式中:ηI,ηP,ηD为所对应自主学习快慢,遵循有监督的Hebb学习规律中自主学习快慢的取值规律,通常三者取值不一致。
本文主要是控制并网电流,具体流程如图5所示。
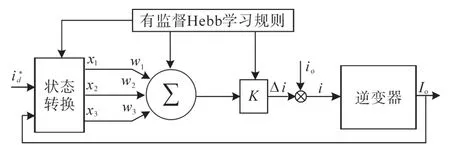
图5 控制流程框图Fig.5 Control flow chart
3 稳定性分析
本系统采用的单神经元自适应PID调节器是一种非线性调节过程,因此采用李雅普诺夫直接法来进行分析。
首先构造能量函数为

在学习过程中,其变化为

由于下式:
系统误差e的变化为

由式(11)~式(13)可推出:
根据Lyapunov直接法进行判定,有如下几个方面[13]:
1)根据式(10)计算的V(k)是一个正定的能量函数;
2)能量函数具备连续的一阶导数,其取值随着k值得增大而增大;
以上三点都成立时,那么可以将函数V(k)视为Lyapunov函数。从上述三点可以看出,前两点在动态过程中(即k值在变化)也是能够达到要求的,这时可以将学习速率的取值减小,使得ΔV(k)为负定函数。因此当k越来越大时,e(k)的值将无限接近于零,即系统稳定。
4 实验与结论
搭建了T型三电平逆变器实验平台,用于验证本文所提出的单神经元自调节PID调节器用于T型三电平逆变器并网电流的快速跟踪。平台使用意法公司的STM32F407ZG作为核心数字控制芯片,并使用Altera公司的EPM240型号CPLD作为辅助控制芯片,直流电源使用Myway电源。具体电路参数为:电网滤波电感L=6 mH,直流侧电容C1=C2=1 500 μF,开关频率10 kHz,直流母线电压200 V,电网相电压100 V,并网电流10/5/8 A。图6为系统整体控制框图。
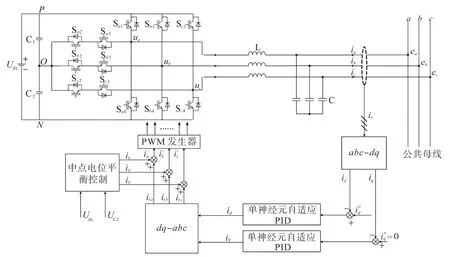
图6 系统整体控制框图Fig.6 Overall control block diagram of the system
图7为逆变器并网时,直流侧上电容电压波形和三相并网电流波形。观察波形可知上电容电压100 V,为直流侧输入的50%,中点电位达到平衡,并网电流ia,ib,ic呈现正弦,证明了本文所提方案在T型三电平逆变器并网时能够对电流进行控制。
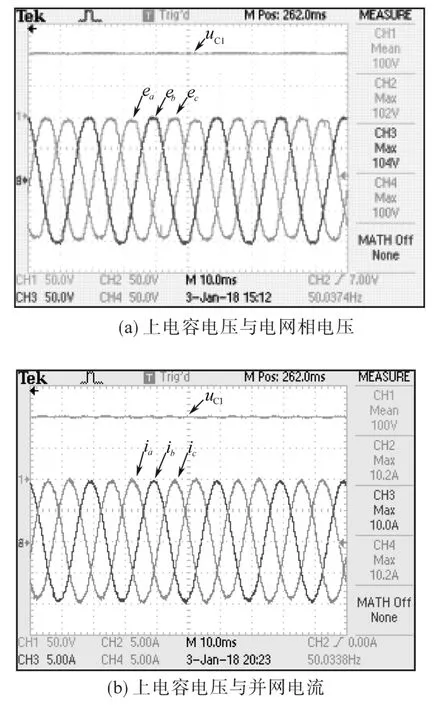
图7 并网时电网侧波形Fig.7 Waveforms of grid side when connected to grid
图8是验证本文控制方法的动态效果,是并网电流的参考值进行变化而得到的实验波形。从图8b中可以观察到,当减小并网电流参考值时,从给定发生变化开始到并网电流再次跟上给定值,动态响应过程大约为1.1 ms。从图8c中可以观察到,当增大并网电流参考值时,从给定发生变化开始到并网电流再次跟上给定值,动态响应过程大约为1.6 ms。因此可以证明单神经元自调节PID调节器具有快速的动态响应。
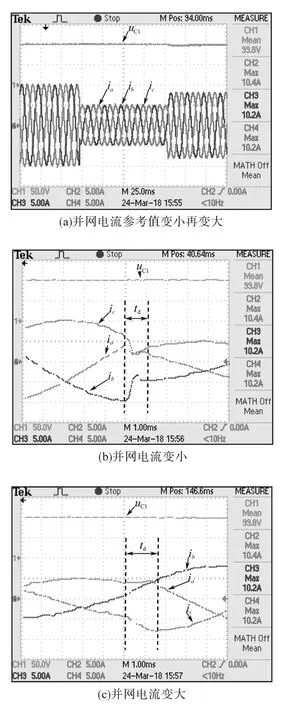
图8 参考值变化时的并网电流波形Fig.8 Grid-connected current waveforms with variable reference value
图9为传统PID调节器下与单神经元自调节PID调节器下的并网电流跟踪对比图。从图9a中可以看出,在传统PID调节器下的并网电流跟踪上给定的时间大约为4.8 ms,而从图9b中可以看出,单神经元自调节PID调节器下整个动态响应时间大约为1.6 ms。因此单神经元自调节PID调节器下的并网电流比传统PID调节器下具备更快的动态响应速度。
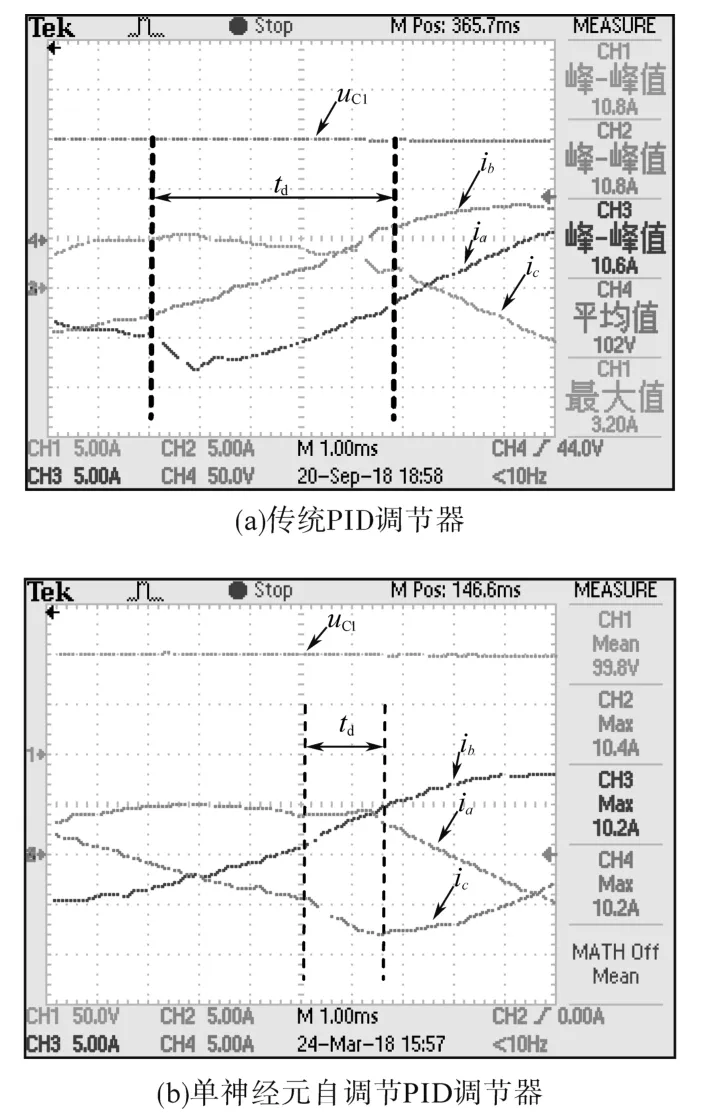
图9 并网电流对比波形Fig.9 Contrast waveforms of grid-connected current
本文提出将单神经元自调节PID调节器应用于T型三电平逆变器并网系统之中,用于弥补传统PID调节器的动态响应能力不足的问题。介绍了单神经元自调节PID原理及其自主学习的规律,用其代替传统PID调节器,通过实验结果验证了所提方案的正确性和可行性。实验结果证明单神经元自调节PID调节器电流闭环方案能够实现T型三电平的并网,同时比传统PID调节器具备更快的动态响应过程。
