星载EMI在轨光谱定标方法研究
2021-06-08王歆远司福祺赵敏杰周海金江宇汪世美
王歆远,司福祺,赵敏杰,周海金,江宇,汪世美
(1中国科学院合肥物质科学研究院安徽光学精密机械研究所,中国科学院环境光学与技术重点实验室,安徽 合肥 230031;2中国科学技术大学,安徽 合肥 230036)
0 引言
星载大气痕量气体差分吸收光谱仪(EMI)搭载于高分五号卫星,于2018年5月9日成功发射,可用于获取紫外可见波段的高光谱遥感数据,以及定量监测全球痕量气体的变化、分布、及运输过程[1]。EMI与已发射的GOME-2、OMI和TROPOMI类似,是一种差分吸收光谱仪(DOAS),其包含四个光谱通道,即紫外1(UV1:240~315 nm)、紫外 2(UV2:311~403 nm)通道及可见 1(VIS1:401~550 nm)、可见 2(VIS2:545~710 nm)通道,覆盖了240~710 nm的光谱范围,其光谱分辨率为0.3~0.5 nm,光谱定标精度优于0.05 nm。在紫外通道上,其空间维上包含1024个传感器,光谱维上包含1072个传感器;可见通道上,其空间维上包含576个传感器,光谱维上包含1286个传感器。其中空间维上不同的探测器对应不同的视场角,通常以“行”区分,中心行即为天底观测,边缘行分别对应±57°视场角,其天底空间分辨率在紫外通道为13 km×8 km,可见通道为13 km×12 km(空间维合并行数为4行)。此外,EMI从南极移动向北极会包含1471幅图像。
载荷在发射升空后,会受到诸多因素影响,例如温度、压强以及震动等,探测器中心波长会产生波长漂移现象,光谱分辨率也会发生变化。并且,由于光谱仪空间维方向上探测视场较大,被测目标成像于探测器焦平面时,会产生光谱弯曲现象,因此需要对其在轨光谱性能进行分析[2]。星上光谱定标方法主要分为以下两种:一是装配具有标准发射线的标准灯,通过标准灯发射线位置的变化来确定仪器的波长漂移。采用这种方法的有GOME以及FY-3紫外臭氧总量光谱仪等。第二种是在定标时,在光路中添加已知吸收线位置的标准滤光片,测量吸收线峰值位置的变化,进而实现光谱定标。上述两种方法均存在一定的局限性:方法一由于载荷在轨运行期间所装配的标准灯需要一定的点燃功耗,并且标准灯所能覆盖的光谱范围较小,满足不了大光谱范围、高光谱分辨率定标的要求。而如果采用多种覆盖不同光谱范围的标准灯,则需要转动机构对标准灯进行转换,进一步增大了对卫星资源的需求且降低了其可靠性。方法二需要转动机构将滤光片移入、移出光路中,对转动机构的精密性要求较高,另外对滤光片的带宽也有一定要求。而近年来国外常用的星上定标方法为通过太阳Fraunhofer线对测量谱线进行全视场定标,利用太阳固有的特征谱线为标准,减少了机械结构的影响[3]。
本文对星上光谱性能定标分析研究主要包括光谱范围选取、空间维光谱弯曲量确定以及光谱分辨率变化分析。其中光谱范围选取采用太阳Fraunhofer线作为标准吸收线,完成特征峰-像元配对,并进行多项式拟合得到光谱定标系数[4];采用谱线匹配方法,以Pearson系数作为匹配结果判定,获取空间维的光谱弯曲值;采用光谱拟合法,将测量谱和高分辨率太阳标准谱拟合,基于拟合结果分析光谱分辨率的变化情况。
1 光谱定标算法
1.1 光谱探测范围的选取:寻峰法
大气痕量气体差分吸收光谱仪光谱定标方程模型可以定义为

式中:λi,j为面阵探测器像元的中心波长,i为光谱维像元号,j为空间维行号;Ck,j为第j行的波长定标多项式系数,此处选取二阶多项式拟合求解光谱定标方程中的Ck,j[5]。在EMI的波长定标过程中,四个通道各选取了四个太阳光谱Fraunhofer特征点,如图1所示,图中数字表示的点即为各个通道所选取的Fraunhofer参考点。
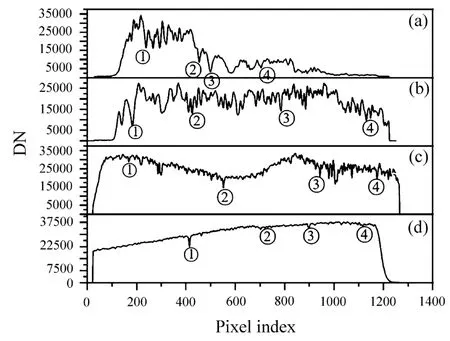
图1 EMI中心视场原始太阳光谱。(a)UV1通道;(b)UV2通道;(c)VIS1通道;(d)VIS2通道Fig.1 Raw solar spectrum in EMI CFOV.(a)UV1,(b)UV2,(c)VIS1,(d)VIS2
表1为四个通道各自选取的Fraunhofer参考点的标准波长值,其数据来自于SAO2010太阳辐照度参考谱。每个通道选取四个点,每个点像元DN值都是附近少数像元DN值中的最小值,由此找寻各空间维Fraunhofer特征峰所对应的像元号。再进行二阶多项式拟合,得到各个空间维每行的光谱定标系数,将光谱维像元号代入光谱定标方程即可得到每个像元所对应的光谱波长。
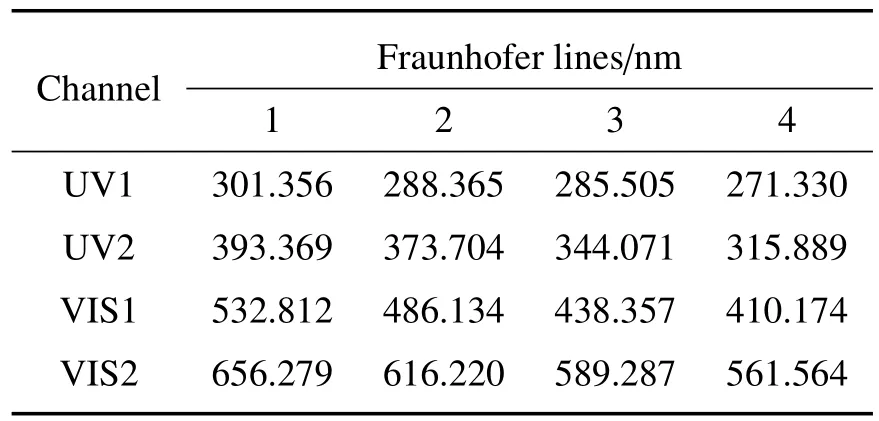
表1 EMI波长定标所使用的Fraunhofer线Table 1 Fraunhofer lines used for EMI wavelength calibration
EMI中心视场在轨光谱定标多项式拟合结果如图2所示,基于此获取到的光谱范围如表2所示。
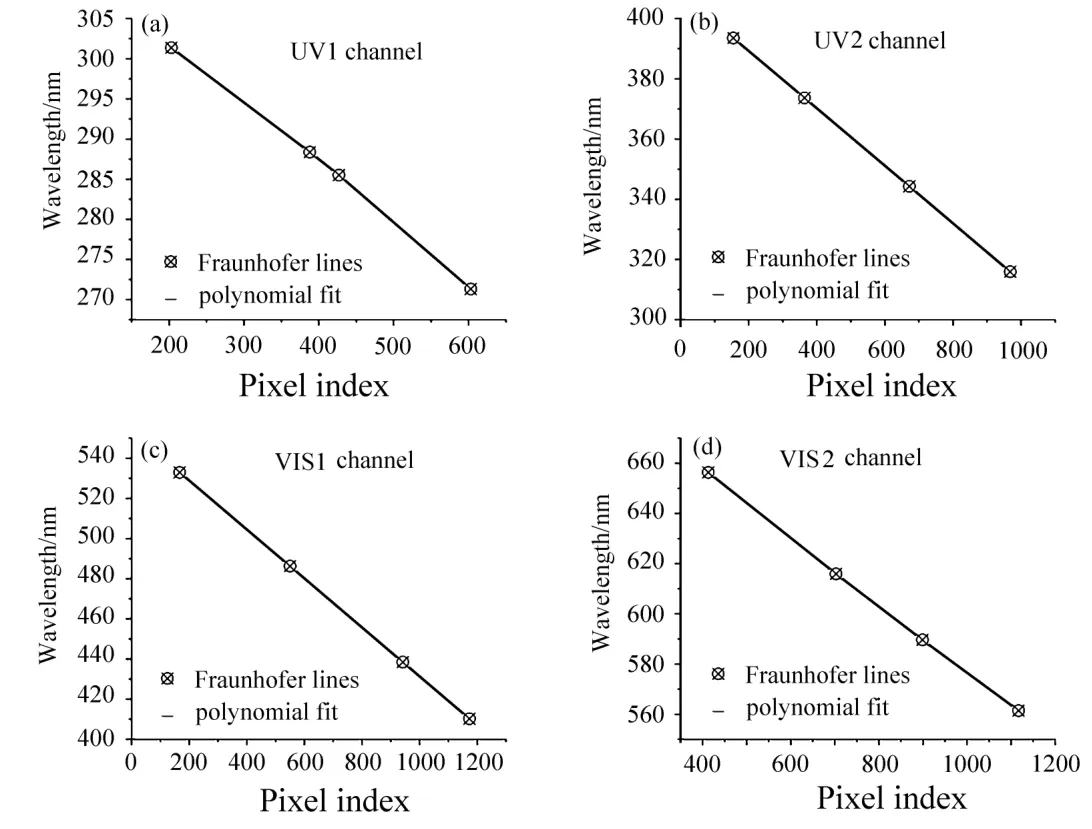
图2 EMI四个通道UV1(a)、UV2(b)、VIS1(c)、VIS2(d)在轨光谱定标多项式拟合结果Fig.2 On-orbit polynomial fit results of UV1(a),UV2(b),VIS1(c)and VIS2(d)channels of EMI wavelength calibration
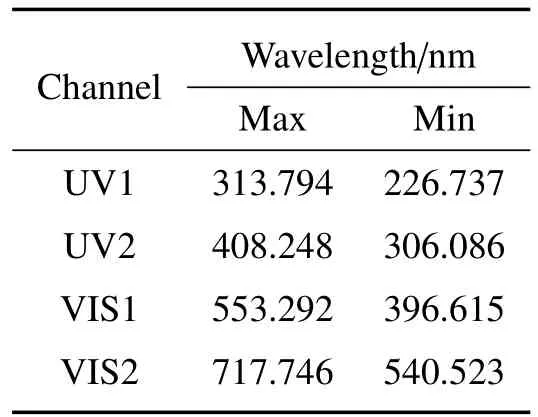
表2 EMI波长定标光谱范围Table 2 Spectral range for EMI wavelength calibration
1.2 光谱弯曲值的获取:谱线匹配法
空间维方向上边缘视场像元的波长值相较于中心视场像元的波长值存在规律性的偏移,进而导致全视场的光谱在空间维方向上存在弯曲的现象称为光谱弯曲(Smile)现象[6]。光谱弯曲现象严重影响了目标像在面阵探测器焦平面上的定位,导致在轨遥感数据的精度大大降低,因此需要在光谱仪空间维度进行光谱定标,以此得出探测器上每个探测像元的实际中心波长。由于Fraunhofer线在大气谱线中的位置固定,且EMI的分辨率较高,常见的Fraunhofer线EMI皆可分辨出,因此可以选择特定的Fraunhofer线进行谱线匹配从而完成光谱定标。如图3所示为EMI测量的大气光谱图像,图中弯曲黑线部分即为Fraunhofer吸收线,纵向为空间维,横向为光谱维,由图可明显看出在空间维方向上存在光谱弯曲现象。
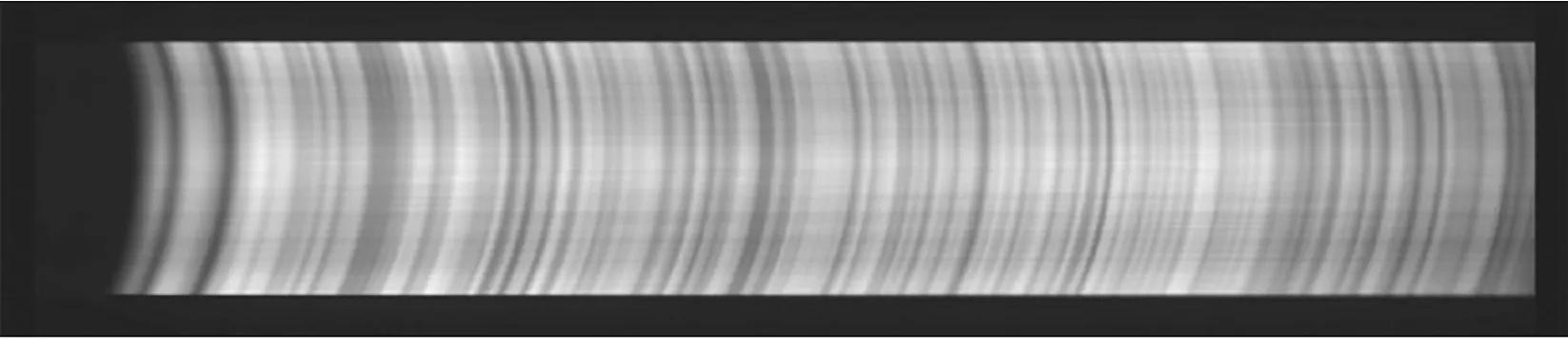
图3 EMI测量的大气光谱图像Fig.3 Atmospheric spectrum image measured by EMI
选取两条Fraunhofer线进行处理,以仪器中心视场的Fraunhofer吸收线作为参考谱线,光谱匹配范围设为3 nm,匹配步长为0.02 nm,在选定的光谱范围内将测量谱线与参考谱按照选定步长进行匹配,得出每个步长下的匹配结果即两谱线之间的相关系数,将相关系数最大处的匹配步长作为该空间维视场上的偏移值。对每个空间维视场进行谱线匹配即可得到整体的光谱弯曲值,进而完成光谱定标。
该方法中采用Pearson相关系数法对匹配结果是否为最优进行判定,相关系数ρpearson计算公式[7]为

式中:SM(λi)为测量谱线DN值,SR(λi)为参考谱线DN值,N为所选谱线的采样点数。ρpearson范围为0~1,值越大则相关性越高,匹配结果越优。
EMI四个通道仪器光谱弯曲值如图4所示,横轴为CCD空间维像元号,纵轴为光谱相对参考谱偏移量,正值表示光谱向短波方向偏移。由结果可知,仪器四个通道边缘视场相对于中心视场最大光谱弯曲值分别为1.43、2.04、1.41、1.27 nm,四通道各空间维匹配结果相关系数均高于0.96。
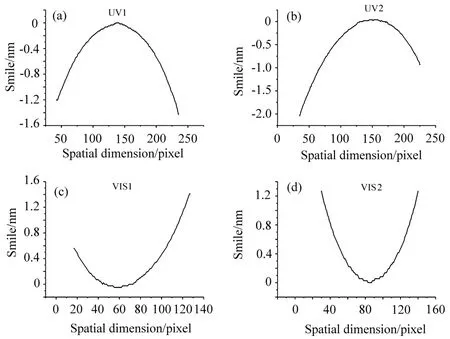
图4 四个通道UV1(a)、UV2(b)、VIS1(c)、VIS2(d)谱线匹配结果光谱弯曲值Fig.4 Spectral smile values of UV1(a),UV2(b),VIS1(c)and VIS2(d)channels from spectrum-matching
1.3 光谱分辨率分析:光谱拟合法
通常,将完整的校准间隔分为多个子窗口,并根据以下公式在每个子窗口中进行拟合过程,以获取校准的波长。

式中:I0是辐照度测量值;L为EMI狭缝函数所拟合的半高宽(FWHM),即光谱分辨率,也被称作狭缝函数参数(SFP);Is是太阳光谱辐照度值;α是波长偏移;β是波长拉伸(β>0)或压缩(β<0)值;λc是子窗口的中心波长。
为了分析EMI的光谱分辨率,即SFP,选取312~356 nm的四个子窗口以及405~465 nm的五个子窗口进行光谱拟合,拟合类型选择高斯拟合。UV2通道的SFP如图5所示,显示的是2019年1月7日一天内中间轨道号处中间幅图像SFP在空间维上不同行的变化图。可以看出,SFP关于行变化有极强的相关性,呈现一个“W”的形状,即边缘行以及中心行值偏大。其不同轨最大最小值详见表3,SFP变化幅值为0.2076 nm。
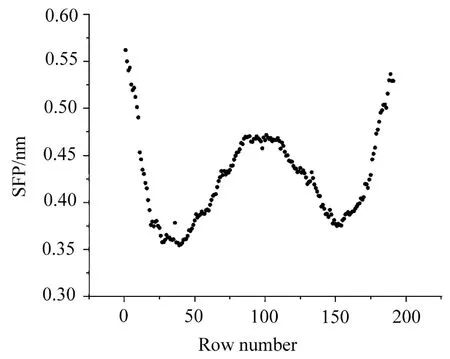
图5 EMI UV2通道3549轨狭缝函数参数行变化情况Fig.5 Slit function parameters of orbit 3549 from UV2 band of EMI as a function of row
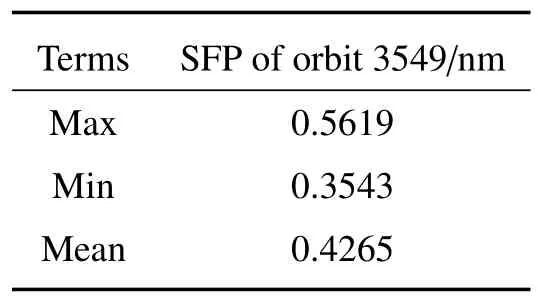
表3 EMI UV2通道3549轨SFP数据Table 3 Statistics of SFP of orbit 3549 from UV2 band of EMI
UV2通道的同轨同一行SFP即光谱分辨率变化如图6所示,显示的是于2019年1月7日一天内同轨边缘行与中心行SFP变化。可以看出,同轨同一行的SFP没有过多变化。其SFP最大最小值以及标准差值详见表4。

图6 EMI UV2通道3544轨狭缝函数参数关于图像序号变化情况Fig.6 Slit function parameters of different pictures of orbit 3544 from UV2 band of EMI
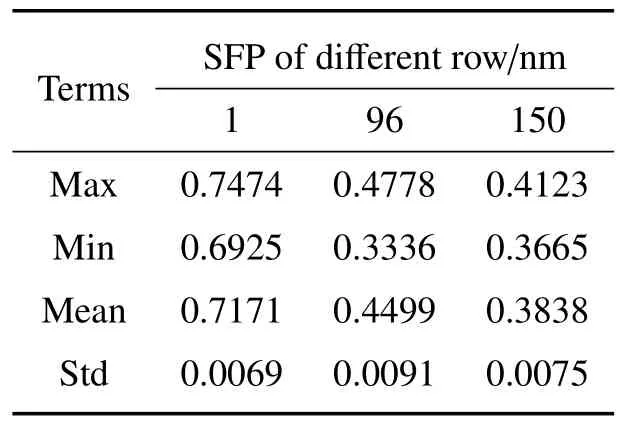
表4 EMI UV2通道不同行SFP数据Table 4 Statistics of SFP of different rows from UV2 band of EMI
图7所示为2019年1月7日UV2通道所测量的全天SFP,由图可知每轨SFP在空间维每行变化一致。
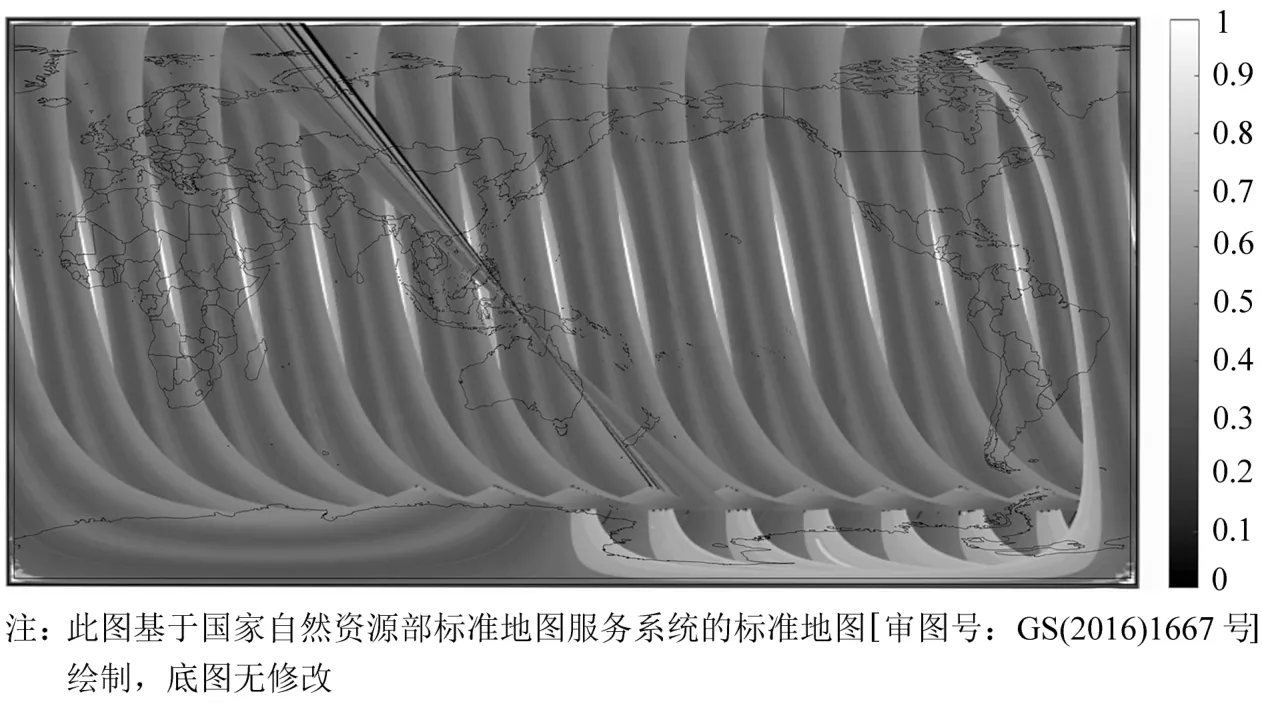
图7 2019年1月7日全天连续15轨UV2通道所测量的SFPFig.7 SFP of 15 consecutive orbits measured by UV2 band on January 7,2019
VIS1通道的SFP即光谱分辨率如图8所示,显示的是于2019年1月7日一天内中间轨道号处中间幅图像SFP在空间维上不同行的变化图。可以看出,SFP关于行变化整体呈下降趋势,中心行左右在0.4 nm处波动,末尾边缘行回升。其不同轨最大最小值详见表5,其SFP变化幅值为0.1950 nm。

图8 EMI VIS1通道3549轨SFP行变化情况Fig.8 SFP of orbit 3549 from VIS1 band of EMI as a function of row
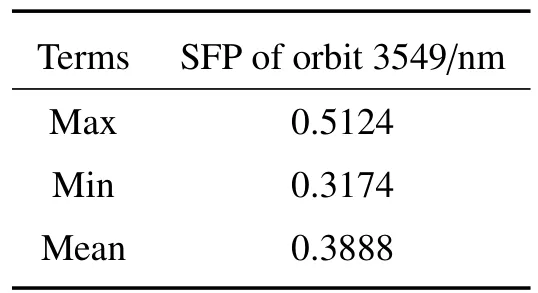
表5 EMI VIS1通道3549轨SFP数据Table 5 Statistics of SFP of orbit 3549 from VIS1 band of EMI
VIS1通道的同轨同一行SFP即光谱分辨率变化如图9所示,显示的是于2019年1月7日一天内同轨边缘行与中心行SFP变化。可以看出,同轨同一行的SFP没有过多变化。其SFP最大最小值以及标准差值详见表6。
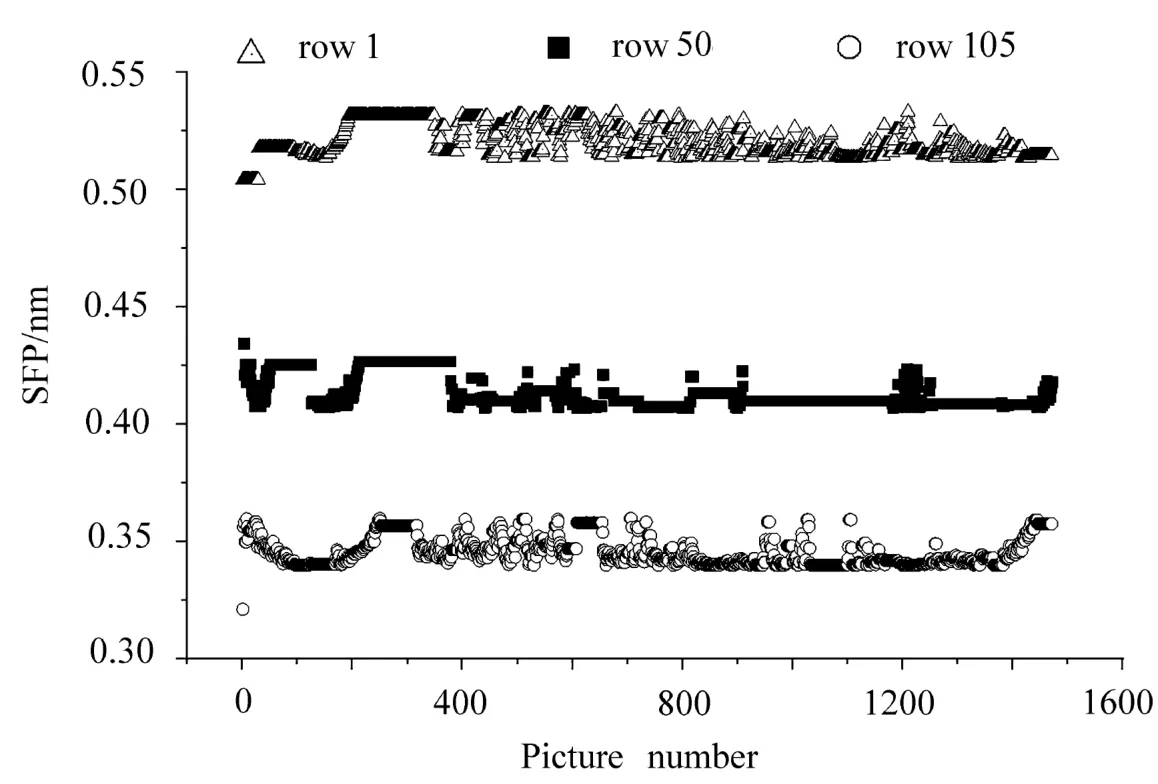
图9 EMI VIS1通道3549轨狭缝函数参数关于图像序号变化情况Fig.9 Slit function parameters of different pictures of orbit 3549 from VIS1 band of EMI
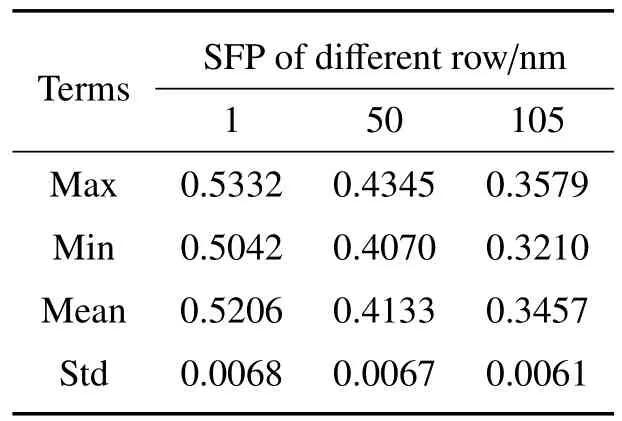
表6 EMI VIS1通道不同行SFP数据Table 6 Statistics of SFP of different rows from VIS1 band of EMI
图10所示为2019年1月7日VIS1通道所测量的全天SFP,由图可知每轨SFP在空间维每行变化一致。

图10 2019年1月7日全天连续15轨VIS1通道所测量的SFPFig.10 SFP of 15 consecutive orbits measured by VIS1 band on January 7,2019
2 结论
讨论的星上定标方法区别于常用的定标方法,通过对空间维度中心行进行精确光谱定标得到其光谱范围,再由谱线匹配法扩展到其余空间维行上,得到全视场光谱弯曲值,以及高精度定标光谱,其拟合相关度均高于0.96,匹配步长0.02 nm高于精度设计要求0.05 nm。该方法避免了对空间维每行均进行高精度光谱定标,提高了光谱定标效率。光谱拟合法通过与太阳光谱拟合,可得出不同轨光谱分辨率的变化情况,其标准差值均高于0.01,对之后仪器在长时间运作或受到干扰情况下的性能衰变分析具有重要意义。
