海洋上空云多角度偏振辐射阈值检测方法研究
2021-06-08王佳佳孙晓兵提汝芳余海啸
王佳佳,孙晓兵,提汝芳,余海啸
(1中国科学院合肥物质科学研究院安徽光学精密机械研究所,中国科学院通用光学定标与表征技术重点实验室,安徽 合肥 230031;2中国科学技术大学,安徽 合肥 230026)
0 引言
云覆盖了60%以上的地球表面[1],在地气辐射平衡过程中起着重要的作用,一方面,云以向后散射的方式反射一部分太阳短波辐射,另一方面,以长波的形式向外发射辐射[2]。除此之外,云通过调节水文循环的方式影响大气降水,云和大气潜在的热量交换影响大气环流[3],云量的微小变化或垂直分布的变化都可能会对地球的能量收支产生重大影响[1]。研究云量变化不但可以帮助发现危险的气候现象,而且可以跟踪气象条件的变化[4]。
卫星遥感可以全天候、大范围监测云的时空变化,云检测是卫星遥感数据处理中的首要关键部分。目前,基于遥感图像的云检测方法主要有阈值法,纹理特征和空间特性法、统计学方法等。光谱阈值法主要有固定阈值法[5,6]、动态阈值法[7]和多波段组合阈值法[8]等。纹理特征法[9,10]主要是利云和其他地物图像的纹理特征及空间信息特征的差异进行的云检测算法。统计学方法[11,12]是通过统计大量具有云和其他地物信息特征的样本库,构建云检测公式或基于神经网络、深度学习等机器学习方法对样本信息进行学习和训练来达到云检测的作用。
针对阈值的云检测方法在不断改进中,对于大多数的光谱数据来说,往往是使用辐射强度信息进行云检测,而利用DPC数据的多角度偏振辐射特性可以实现多角度判别,并且利用偏振对单次散射敏感可以很好地区分水云像元。针对海洋上空的云检测往往是将耀光区域剔除[13],并不检测耀光区域上空的云。然而,在研究海洋上空云物理特性和气溶胶特性时,耀光区域的云也有重要的影响。利用云的偏振特性可以检测出耀光区域的云像元。
POLDER3是法国国家空间研究中心(CNES)研制的3颗POLDER载荷系列之一,具有多角度、多波段偏振的探测功能,主要用于研究大气气溶胶、云、水汽和地-气辐射收支。POLDER3于2004年12月一直持续运行到2013年12月,获取了大量的观测数据。
搭载在我国高分五号卫星上的大气气溶胶多角度偏振探测(Directional polarimetric camera,DPC)于2018年5月成功开机,并下传数据。DPC的波段设置与POLDER3/PARASOL类似,主要为443~910 nm范围内的八个工作谱段,其中490、670、865 nm为偏振波段,多角度成像数量大于9个,星下点空间分辨率约为3.29 km。与POLDER3相比,DPC拥有更高的分辨率,检测云的效率更高。
DPC的主要任务是获取全球大气气溶胶和云特性参数,可用于海洋和陆地的观测。有效的云检测是进行云特性参数反演和海洋水色反演的前提。基于DPC多角度偏振辐射信息设计了一套针对海洋上空的云检测算法,利用云的反射率和偏振辐射特性进行阈值检验,分别对海洋耀光区域和非耀光区域进行云检测。
1 数据和方法
云检测是进行云微物理特性研究和大气气溶胶特性反演的前提,在DPC产品中云检测是不可缺少的一个环节,接下来介绍DPC的主要技术参数,再分析云检测算法。
1.1 POLDER3和DPC数据
大气气溶胶多角度偏振探测仪(DPC)波段设置和功能与POLDER3相似,主要功能和任务是获取大气层顶的多波段、多角度偏振辐射反射信息,用以开展大气气溶胶、云的光学和物理特性研究,也可以进行海洋水体观测,为全球气候变化和大气环境监测提供遥感数据支撑和保障。由于POLDER3和DPC相似的仪器特性,因而利用POLDER3数据和其官方云检测产品验证云检测算法的有效性。DPC和POLDER3仪器的主要技术参数见表1。
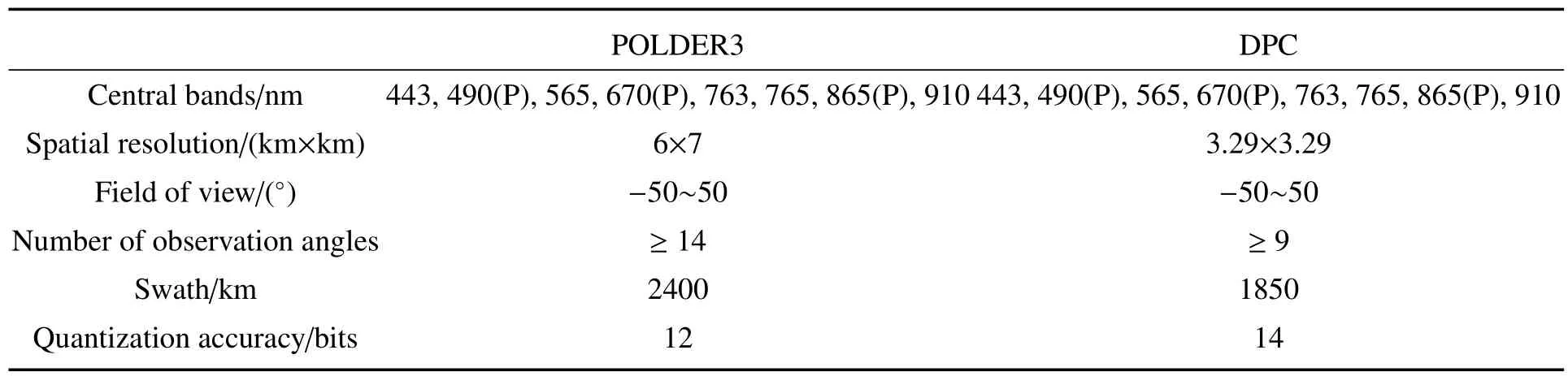
表1 DPC和POLDER3主要技术参数对比Table 1 The comparison of main technical parameters of DPC and POLDER3
DPC采用512×512面阵CCD作为探测器,以实现大视场和多角度观测成像,空间分辨率约为3.29 km,和POLDER3相比有更高的精度。DPC有海洋模式和陆地模式两种工作方式,可在轨切换。
1.2 海洋上空云检测算法
非偏振的太阳直射光经过大气分子、气溶胶和地物等的散射或反射后偏振态会发生改变,通常用邦加球法、琼斯矢量和斯托克斯矢量来表征偏振态。由于斯托克斯四个矢量都有光强特征,偏振遥感仪器探测不同偏振方向的光强,通过穆勒矩阵和斯托克斯矢量的方法可以研究入射光的偏振特性。文中采用斯托克斯参量(I、Q、U、V)来描述偏振光,其中,I为强度分量,Q、U、V是偏振分量,圆偏振分量V在自然界中存在极少,可以忽略。
为了描述地-气系统对直射太阳光的反射特性,定义归一化反射率为R,归一化的偏振反射率为RP。二者的计算公式分别为

式中:L表示辐亮度,µs表示太阳天顶角余弦,E表示大气层顶太阳辐照度,RP表示归一化的偏振反射率,Q表示平行或垂直于参考平面的线偏振的强度,U表示与参考平面成45°角的线偏振的强度。
定义线偏振度P为

海洋水体和云的光谱反射率差异较大[14],在865 nm波段海水的反射率通常低于5%,而云在此波段的反射率普遍高于50%,因此将该波段作为云检测算法的主要波段。根据菲涅尔反射定律,水体在入射光满足布儒斯特入射角条件时,反射光的偏振度接近于1。受海面上空风的影响,海面通常不是平静的水面,粗糙的海面可以分解为满足一定概率分布的微小镜面元,在一定角度范围的反射率很高,且线偏振度峰值可达0.7~0.9[15,16]。而云的线偏振度相对较弱,因此可以利用耀光的偏振特性进行海洋耀光区域上空的云检测。海洋非耀光区域在近红外波段的反射率较低,而云反射率比较高,利用二者反射率的差异,可以检测出云像元。
1.2.1 多角度海洋耀光和云检测
DPC可以获取9个观测角度数据,同一个目标像元在不同观测角度的海洋耀光检测和云检测结果可能有差异。海洋耀光是由于太阳光从特定角度照射到海洋表面形成的,有耀光的区域在某个观测角度可能没有耀光,利用多角度可以对耀光区域不同角度的数据分别用有耀光和没有耀光的方法进行云检测,最后对不同角度的像元进行空间融合可以提高云检测结果的精度。在云检测过程中,通过遍历9个角度检测海洋上空的云。
1.2.2 海洋耀光区域判识
海洋耀光是由海洋表面的镜面反射形成的[17]亮海表,常规的云检测算法是针对暗海表的,当有海洋耀光时,容易将其误判为云,因此海洋上空的云检测首先需要通过耀光角判别法区分耀光区域和非耀光区域,针对耀光区域采用偏振度阈值进行云检测。耀光角的定义[18]为
式中:θs、θv、φ分别是太阳天顶角、观测天顶角、相对方位角。利用耀光角的经验值判断是否为耀光像元。
在某些角度,太阳光照在海洋表面经过多次菲涅尔反射形成海洋耀光,海洋耀光具有强偏振的特点,而云的多次散射减弱了偏振信息,云的偏振度小于海洋耀光,因此可以利用偏振度进行海洋耀光上空的云检测。
1.2.3 晴空反射率阈值云检测

式中:R865是像元在865 nm波段的反射率,是像元在865 nm波段的晴空反射率,ΔR1和ΔR2为阈值,式(5)中大于ΔR1的像元为云像元,式(6)中小于ΔR2的像元为晴空像元。
根据实测数据可知,非耀光区域的海表在865 nm波段的反射率大约为0.6%,利用海洋上空目标像元和晴空像元的反射率差异进行云检测。对于海洋上空,晴空反射率可以通过辐射传输模拟来获得,海表反射模型采用Cox-Munk粗糙海面模型[19]。
1.2.4 近红外/可见光反射率比值晴空像元检测

式中:T是晴空像元阈值,通常T取0.7。
云在865 nm和670 nm波段的反射率比值接近于1,而晴空海表的反射率比值小于阈值T[14]。所以,目标像元的比值小于T时为晴空像元,大于T时为未定像元。利用此特性可以检测出晴空像元。
1.2.5 云检测算法流程
综合上述云检测原理,提出了针对海洋上空云的多角度偏振辐射阈值检测算法,算法流程如图1所示。
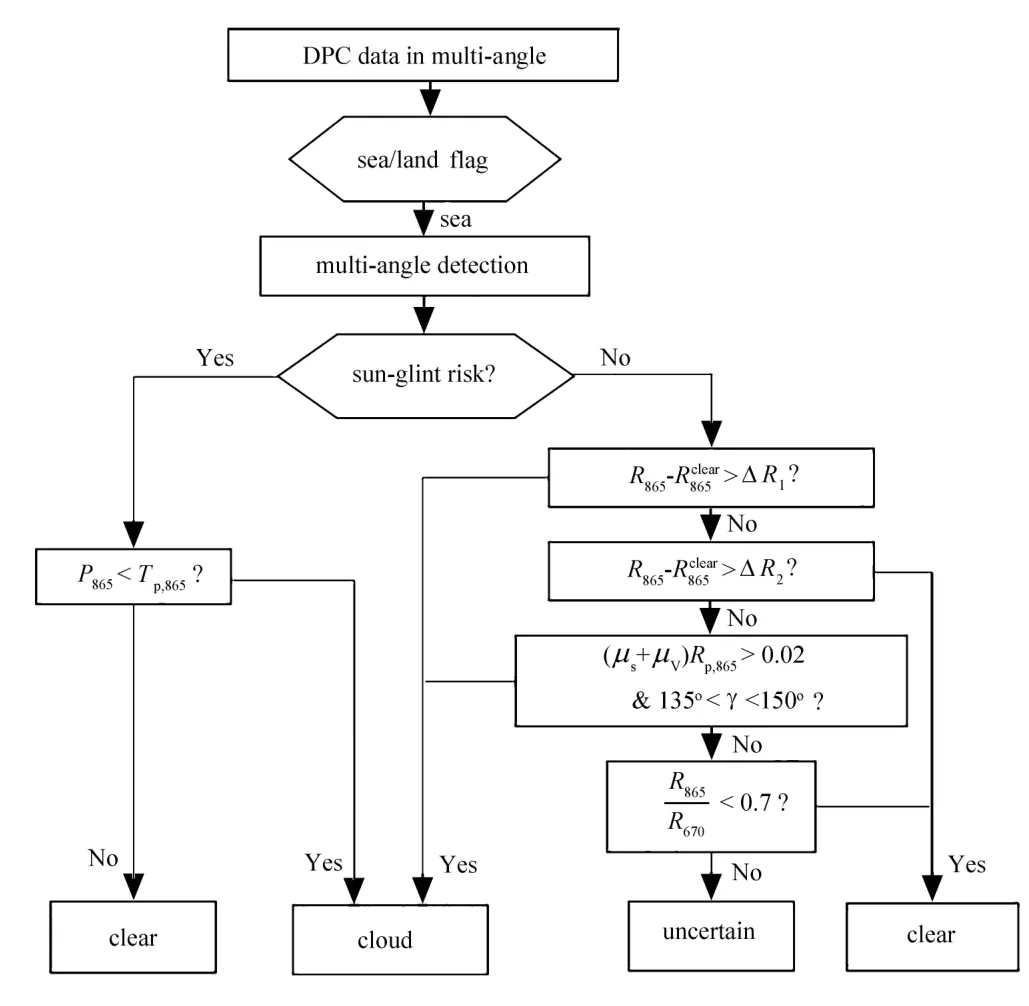
图1 基于多角度偏振辐射信息的海洋上空云检测算法流程图Fig.1 Flowchart of cloud detection algorithm over the ocean based on multi-angle polarization radiation information
海洋上空的云检测算法流程如下:
第一步:输入多角度偏振辐射的DPC数据,根据海陆标识选择下垫面为海洋的像元,进行多角度检测。
第二步:根据耀光角大小判断是否为海洋耀光,MODIS[18]的数据是依据40°的耀光角去除耀光,POLDER3[20]在业务化处理时采用30°经验值判别,在应用到DPC数据时,发现用30°的耀光角作为阈值是比较合适的。耀光角大于30°的区域标记为非耀光区域,小于等于30°的区域标记为耀光区域。
第三步:对非耀光区域进行云检测。1)反射率检验,根据DPC自身的仪器特性,将与晴空反射率差值大于ΔR1的像元标记为云像元,将与晴空反射率差阈值小于ΔR2的像元标记为晴空像元。反射率检验可以检测出反射率特别大的云像元和反射率特别小的晴空像元;2)对反射率检验识别不出来的像元进行偏振反射率检验,当135°<γ<150°并且偏振反射率大于0.02时将像元标记为云像元;3)对剩下的未标记像元,利用近红外反射率和可见光反射率比值检测晴空像元,当目标像元在波长分别为865 nm和670 nm的反射率比值小于0.7时,标记为晴空像元,否则是未定像元。
第四步:对耀光区域进行云检测。由于云层的多次散射有退偏作用,云像元的线偏振度较小目标像元的偏振度小于阈值时标记为云像元,否则标记为晴空像元。
第五步:输出多角度云检测结果。多角度云检测贯穿在全部云检测算法中,当一个角度的检测结果为云就标记为云像元,当所有角度的检测结果都不是云时,有一个角度的目标像元检测结果为晴空就标记为晴空像元,剩下的是未定像元,最后输出结果。
2 数据分析
基于上述云检测算法,利用POLDER3数据进行云检测,将云检测结果与POLDER3的官方云检测结果进行对比,验证算法的可行性。对DPC数据进行了云检测,用时空匹配的MODIS云掩膜产品作为验证数据。
2.1 云检测算法验证
POLDER3官方的云检测算法主要是基于反射率阈值、表观压强和云的偏振特性等来进行云检测,早期的POLDER3数据通过了大型云层表面观测数据集的验证[21]。POLDER3运行到2013年,其业务化产品也使用了很长时间,因此用上述云检测算法对POLDER3数据进行海洋上空云检测,并与其官方云检测产品进行对比来验证云检测算法的有效性。
以POLDER3 2012年12月24日一轨海洋上空数据为例,选定区域范围54°N~−70°S,−12°W~22°E。一致的像元标为100,多检的像元标为0,漏检的像元标为50,如图2所示。从图2(d)可以看出,本研究算法和POLDER3算法都判为“有云”的像元标记为100;云检测算法判为“有云”,POLDER3算法判为“无云”的像元标记为50;云检测算法判为“无云”,POLDER3算法判为“有云”的像元标记为0,两者算法都认为“无云”的像元不统计在内,都统计为“有云”的像元占统计像元的比例为90.40%,即两者的云检测一致性为90.40%,验证了算法的可靠性。
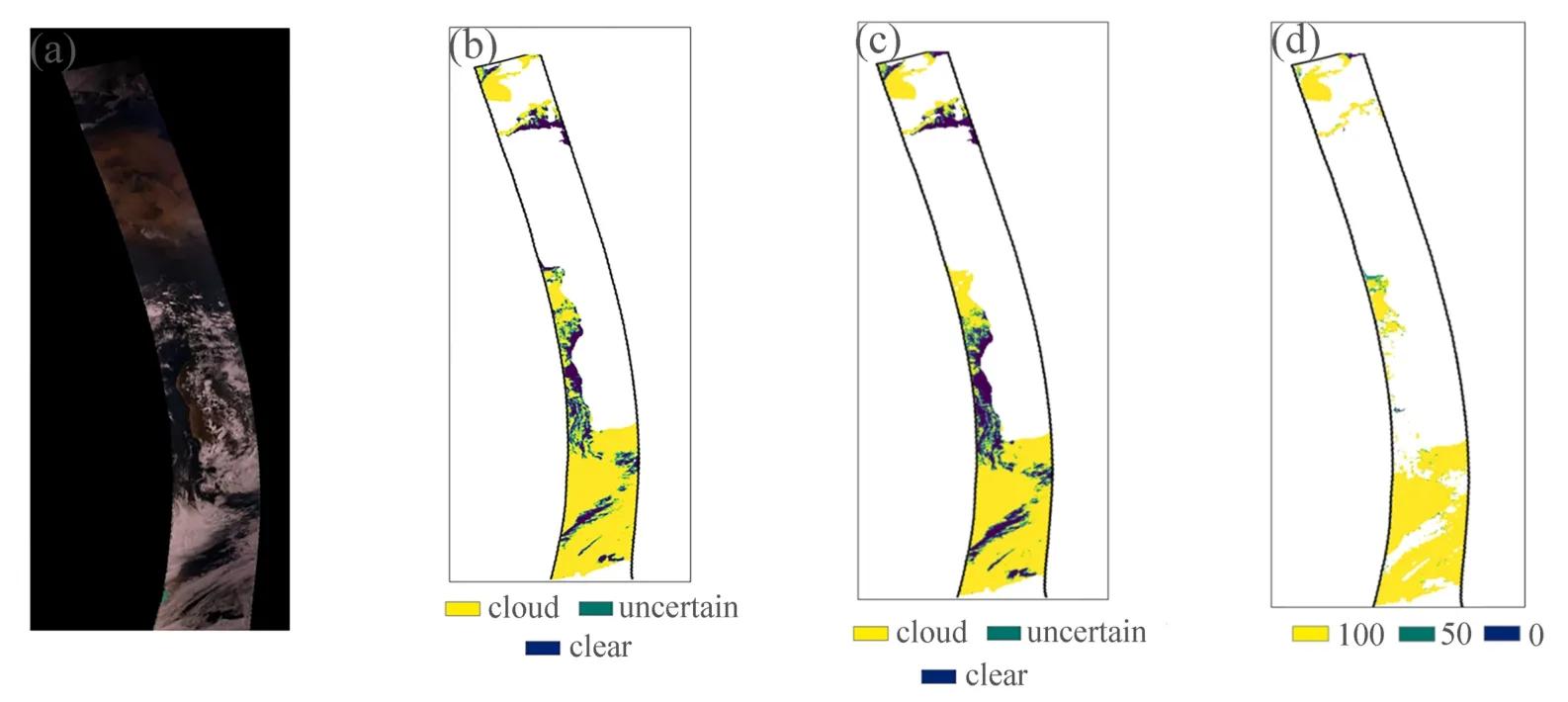
图2 2012年12月24日大西洋上空云检测算法可靠性验证。(a)POLDER3数据的真彩图;(b)云检测算法结果;(c)POLDER3官方的云检测结果;(d)云识别结果与POLDER3的结果对比Fig.2 The reliability verification of the cloud detection algorithm over the Atlantic Ocean on December 24,2012.(a)True color picture of POLDER3 data,(b)the recognition result of the algorithm in this paper,(c)official cloud detection results of POLDER3 data,(d)the comparison of the cloud recognition result of the algorithm and POLDER3
2.2 DPC数据云检测结果和分析
基于多角度偏振辐射阈值云检测算法,针对DPC数据进行了云检测。以印度洋和大西洋上空为试验区域进行了云检测,与MODIS的云掩膜产品进行比较验证。
2018年8月16 日以印度洋上空为试验区域进行云检测,目标区域范围在20°N~−40°N,70°E~110°E之间,实验区域的云检测结果如图3所示。图3(b)是2018年8月16日,基于DPC数据在印度洋上空的云检测结果图。比较DPC的云检测结果和真彩图,可以看出非耀光区域的云轮廓比较一致,耀光区域的云也可以检测出来。图3(c)的红框区域是MODIS和DPC云检测结果中经纬度相同的区域,将图3(b)中标识1、2、3的云分别和图3(c)中标识1、2、3的云作比较,可以看出标识1、标识2和标识3的云轮廓非常相似。
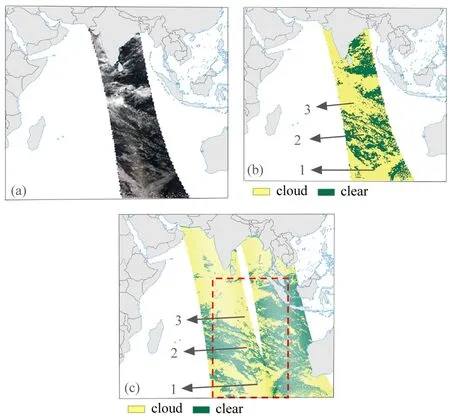
图3 2018年8月16日印度洋上空的DPC、MODIS云检测结果及对比分析。(a)DPC真彩图;(b)DPC云检测结果图;(c)MODIS云掩膜产品图Fig.3 DPC and MODIS cloud detection results and comparative analysis over the Indian Ocean on August 16,2018.(a)True color image of DPC,(b)cloud detection results image of DPC,(c)cloud mask product image of MODIS
考虑到MODIS和DPC的成像方式不同以及云的移动等问题,选取图3(b)和图3(c)标记1的区域进行云检测结果对比验证。对MODIS和DPC的云检测结果进行像元融合和空间匹配,都统计为“有云”的像元占统计像元的比例为91.39%,即云像元检测的一致性为91.39%。
2018年5月16 日以大西洋上空为试验区域进行云检测,目标区域范围50°N~40°S,180°W~100°W。图4(b)是基于上述云检测算法的结果,图4(c)是与DPC成像时间相近区域相同的MODIS云掩膜产品。将图4(b)中标识1、2、3、4部分的云检测结果分别对应于图4(c)中标识1、2、3、4处,可以看出两图中对应标识的部分云轮廓相似,云检测结果相似。考虑到海洋上风速风向的影响,云的位置可能稍微有移动,可以认为DPC云检测结果和成像时间相近区域相同的MODIS云掩膜产品一致。选取图4(b)和图4(c)中标记1区域的云检测结果进行对比验证,对MODIS和DPC的云检测结果进行像元融合和空间匹配,云像元检测的一致性为94.73%,MODIS的云检测结果和DPC的比较相近,验证了DPC云检测结果。
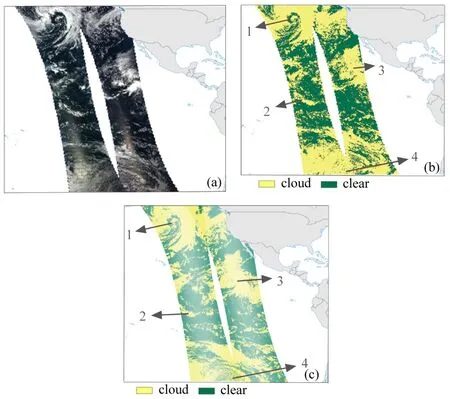
图4 2018年5月16日大西洋上空的DPC、MODIS云检测结果及其对比分析。(a)DPC真彩图;(b)DPC云检测结果图;(c)MODIS的云掩膜图像Fig.4 DPC and MODIS cloud detection results and their comparative analysis over the Atlantic Ocean on May 16,2018.(a)True color image of DPC,(b)cloud detection results image of DPC,(c)cloud mask image of MODIS
3 结论
基于DPC多角度偏振辐射信息,提出了识别海洋耀光、晴空、耀光区域和非耀光区域的云检测算法。用POLDER3数据和官方云检测产品验证了算法的有效性,云检测一致性达到90.40%。利用DPC多角度偏振辐射信息对印度洋和大西洋上空进行了云检测试验,试验结果和成像时间较为一致的MODIS云掩膜产品作比较,经过有特征区域的评估,DPC和MODIS的云检测结果比较一致,选取区域的云检测一致性分别为91.39%和94.73%,说明该云检测算法适用于DPC数据的云检测,为DPC的全球云性质参数反演提供了可靠的云检测算法。
