基于无人机的河道周边污染远程监测方法研究
2021-06-08苏海涛
苏海涛
(贵州省水利水电勘测设计研究院有限公司,贵阳 550002)
0 引 言
贵州省铜仁市是连接中南地区与西南边陲的纽带,该地区周围人口密集、工商农业相对集中,因此对于水资源的需求力度较大[1]。但随着城市化水平的提高,生活污水、工农业生产废水被排放到河流中,使当地水资源出现污染现象,因此急需找到一种监测方法来实时监控河道周边污染程度。传统方法1参考文献[2]和文献[3]的研究内容,将遥感技术与水质监测系统相结合,建立一个完整的远程监测体系;传统方法2则依据文献[4]和文献[5],根据污染来源与分布特征,设置河道水质在线监测节点[2-5],但两种方法使用的远程监测设备性能不高。
因此,以传统监测方法为研究基础,提出基于无人机的河道周边污染远程监测方法。无人机通过无线电遥控设备机器和计算机程控系统,智能化控制飞行线路,不仅具有成本低、结构简单的特点,还可以执行远距离拍摄任务[6]。此次研究以无人机基本参数为条件,研究全新的河道周边污染远程监测方法,为城市人口用水安全提供更加可靠的技术。
1 基于无人机的河道周边污染远程监测方法
1.1 建立无人机远程监测路径规划模型
无人机监测路径优劣程度受约束条件影响,而约束条件主要为航线距离。为了不影响污染远程监测效果,要求无人机从上一监测点运动到下一监测点时的使用时间,不能超过直线飞行时间和任务时间之和。因此,利用一个随机网络模拟无人机飞行空间,然后采用连续空间离散化的方法,将飞行空间简化成离散空间,建立一个概率地图。为了求得最优路径,以自由规划的方式规划二维空间,以随机概率将采样点分布于规划空间内,依照邻近原则相连采样点,形成概率地图。为了降低计算复杂度,选择的点为距离小于基站覆盖区域外直径的点,根据两点之间的弧段跨越长度,确定无人机远程监测最优路径的实际监测范围[7]。假设概率地图的表达式为:
W=(W1,We)
(1)
式中:W1为随机采样点;We为节点之间长度为e的连接线。
设置无人机最大航程、飞行起点以及目标终点,也就是污染监测任务中的两个监测节点,对无人机路径进行规划设置,计算表达式为:
L={Lstart,L1,…,LN,Ltarget}
(2)
式中:Lstart为无人机飞行起点;Ltarget为无人机监测目标;存在一个Li,且Li∈W1,i=1,2,…,N;同时存在{Li-1,Li}∈We。
根据所在区域监测信号连线{Li-1,Li},此时存在不同的信号值,也就是弧收益,用Li-1,i表示,则{Li-1,Li}的长度为d(Li-1,Li)。因此得到目标函数计算公式,也就是满足监测信号强度的最优监测路径:
(3)
(4)
式中:ηij为弧收益。
利用上述模型控制无人机远程监测过程中的飞行轨迹,防止监测出现偏离既定范围的现象[9]。
1.2 基于障碍物特点设置模型避障算法
无人机在飞行监测过程中,受地面建筑以及植被等障碍物的影响,可能会影响既定航线,因此为了让上一环节中建立的规划模型能够发挥最大效用,基于障碍物特点设置模型避障算法。以障碍物特征点为基础,结合最大最小原则,寻找起始点与目标点之间的第一个子目标,再以第一个子目标为起点,寻找第二个子目标,按照上述方法以此类推,直到控制线路规划模型,帮助无人机找到一条无障碍路径。连接无人机起始点与目标点,在与此连线相交的、距离无人机最近的障碍物上,找到距离连线两侧最远的特征点,其中距离连线较近的点就是第一个子目标[10]。当无人机到达该目标点时,二者之间的连线仍然与障碍物相交,此时按照最大最小原则搜索下一个子目标,直至完成目标监测任务。假设无人机起始点坐标为O(XO,YO),目标点坐标为(XZ,YZ),障碍物特征点坐标设置为A(XA,YA)、B(XB,YB)以及C(XC,YC)。则连线OZ与3个特征点ABC之间的连线,可利用下式计算:
(5)
根据限制原则,需要障碍物特征点连线中,存在一条可以与OZ相交的直线,该线就是路径与障碍物的交点线段[11]。因此可知AB与OZ相交,其公式为:
(6)
当上述公式的计算结果为1时,则认为AB与OZ相交,此时的子目标点应满足下列监测条件:
(7)
式中:(Xi,Yi)、(Xj,Yj)为OZ连线两侧特征点。
综合上述计算,实现基于障碍物特点的模型避障算法[12]。
1.3 设计河道周边污染物远程监测追踪定位流程
根据无人机的监测数据,进行追踪定位预处理。河道污染源追踪定位过程中,受移动水的影响,污染物会随之活动,不断变化位置[13]。因此,将河道地图轮廓进行等间距栅格化处理,将每一监测水域设置范围划分编号,以二维数组的形式,标记这些栅格是否可用。然后测出处理污染物指标监测值,该值受监测设备、水温波动的影响,会存在一些误差,因此在导出监测结果之前,处理这些存在误差的数据。下列公式为剔除监测数据异常值时的基本计算过程:
(8)
式中:qn,i为第n个监测节点处、第i次监测下的数值;m为监测次数;εn为异常值剔除原则[14]。
按照上述远程监测追踪定位流程,对河道周边污染物进行远程监测,至此在无人机帮助下,实现对河道周边污染的远程监测优化[15]。

图1 数据远程监测追踪定位流程
2 实验与分析
2.1 器材选择与试飞测试
以贵州省思南县(新城区)乌江重点河段河道治理工程为此次实验测试对象,利用不同的监测方法,定位河道周边污染物扩散位置。实验将文中提出的监测方法作为实验组,将传统监测方法1和传统监测方法2作为对照组,根据不同测试组的监测方法,选择各个小组所需的监测设备,其中实验组的主要监测设备见图2。
组装该无人机,并将其与计算机之间建立连接,并测试该无人机是否稳定、安全,以满足长时间的实验测试要求。因此在保证无人机电量充足的前提下,进行为时40 min的试飞操作,图3为试飞过程中该无人机的任务执行情况。
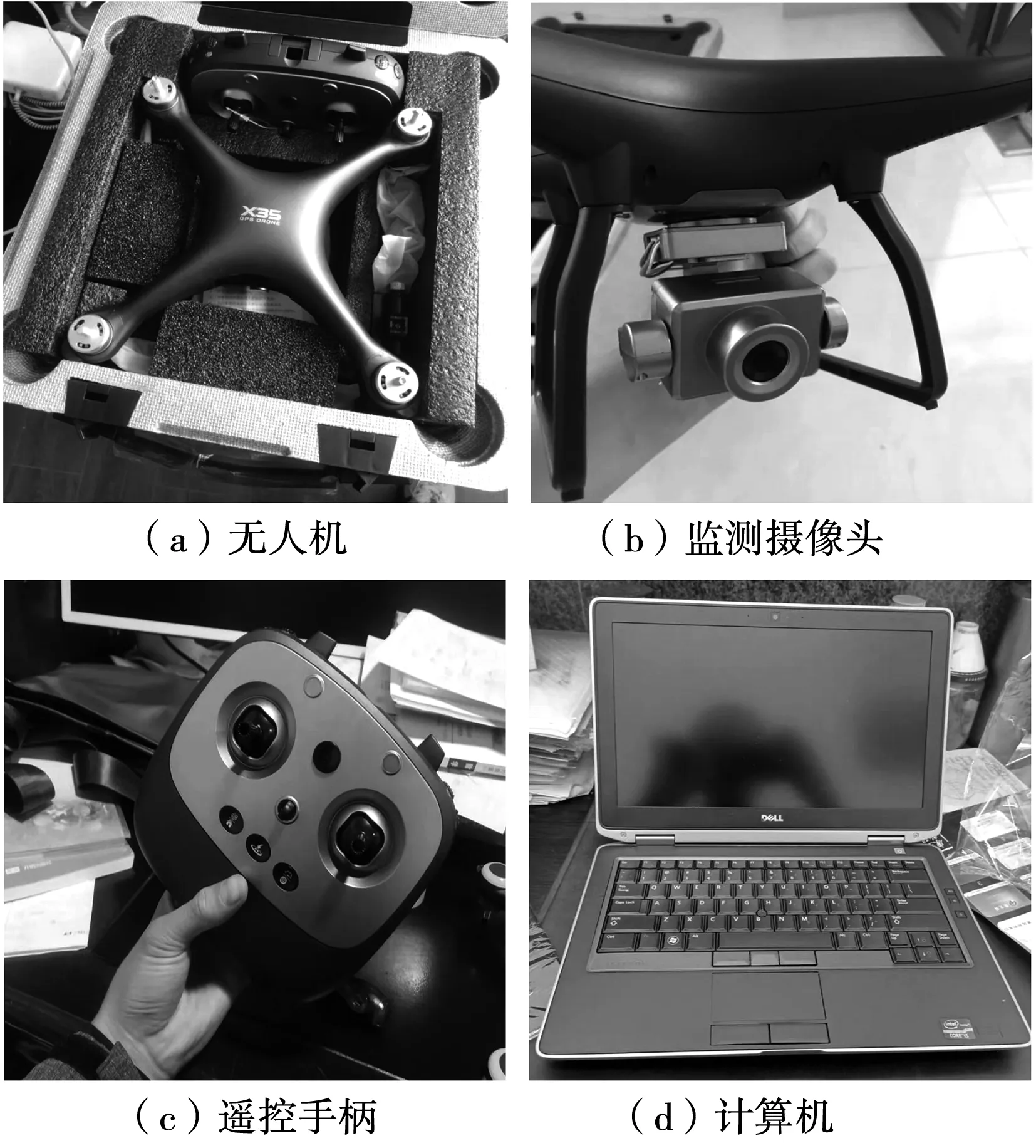
图2 实验组监测设备
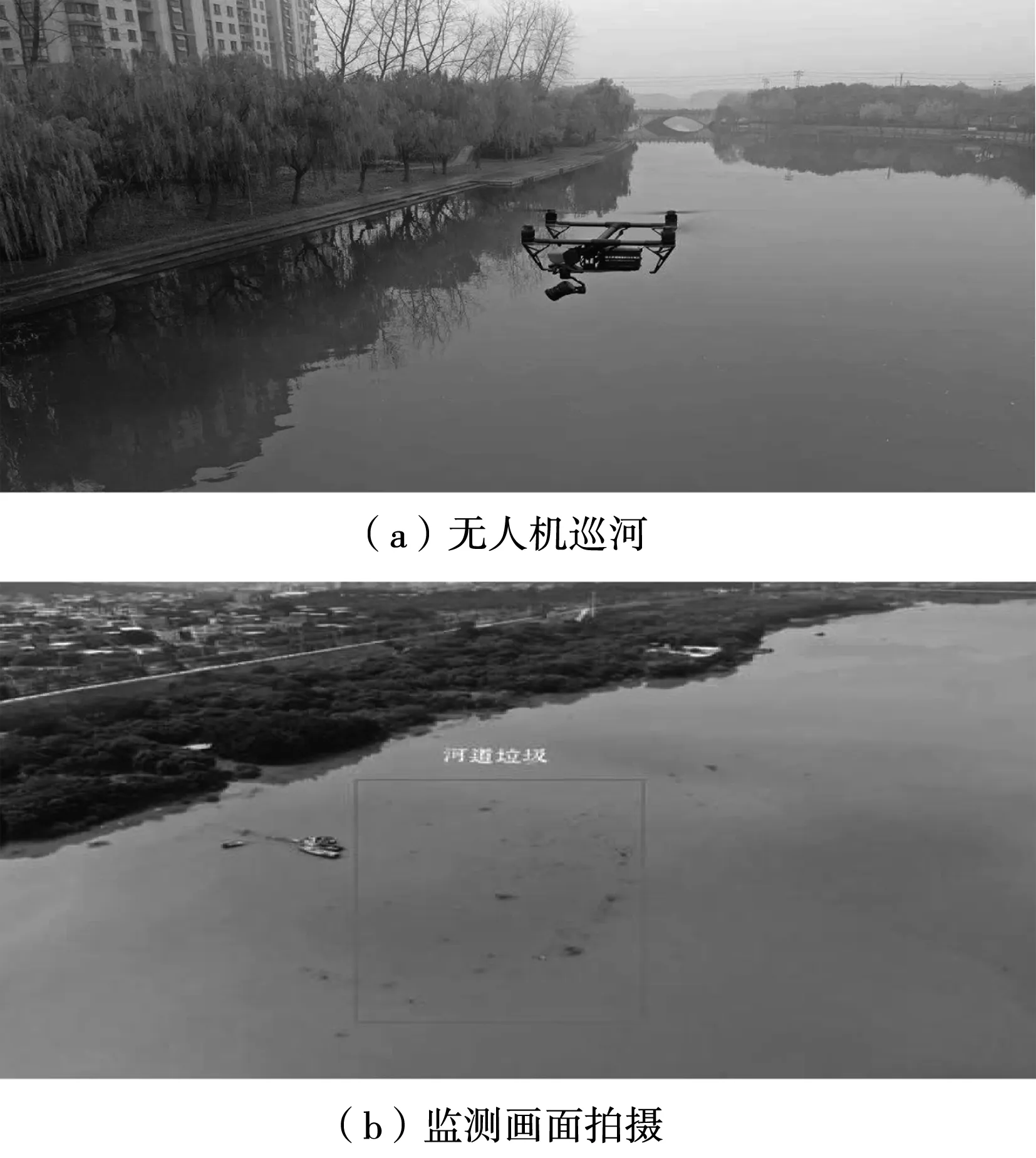
图3 无人机试飞
测试无人机飞行与监测画面效果后,利用3个测试组,对选定的河道水污染区域进行监测,根据监测结果分析不同监测方法之间存在的差异。
2.2 设定无人机监测线路
正式开始对比测试之前,设定文中提出监测方法应用下无人机的监测线路,见图4。

图4 不同采样点下无人机路径规划效果图
根据图4中测试结果,统计3次设置的采样点下,实验组远程监测的所用时间和监测成功率,见表1。

表1 不同采样点实验测试结果
根据测试结果可知,当采样点增多时,成功率会随之下降,计算时间则有所提升。因此,为了保证无人机监测线路更加合理,实验组设置的采样点不宜过大,相较于最短路径搜索,该方法更加注重路径长度满足监测要求,而不是过度追求监测线路长度。因此,实验组将采样点控制在500个。
2.3 污染指数监测
分别按照各自的方法搭建监测环境,然后开始监测河道周边区域内的污染情况,结果见图5。
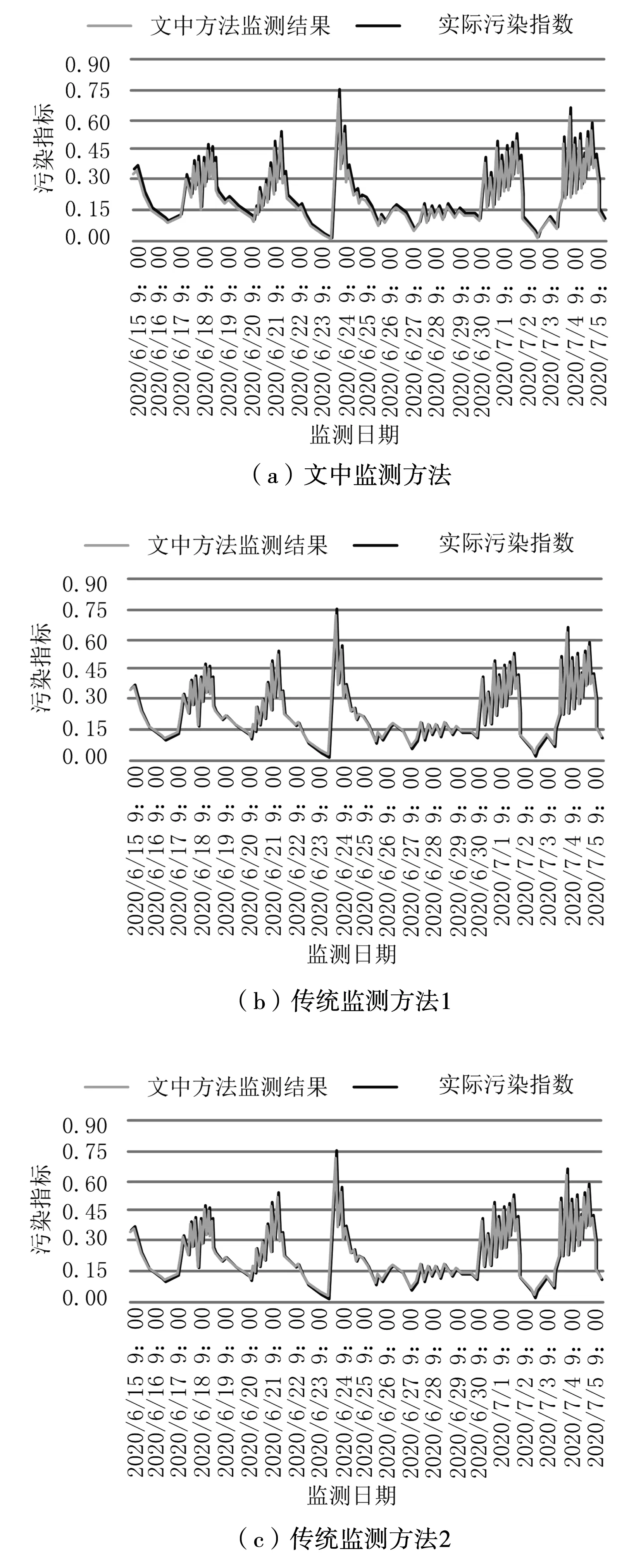
图5 水体污染指标监测效果
根据图5中的对比测试结果可知,在测试时间条件相同的前提下,文中监测方法在无人机应用下,对河道中污染物浓度监测结果,与实际数据之间没有过大差异。而两个传统监测方法的所得结果,同样与实际数据之间没有过大差别。可见3个测试组的河道周边污染物指标监测结果可以信赖。
2.4 污染物分布监测
以当前的河道污染状态为前提,利用3个测试组监测河道周边水体表面的污染物分布情况,结果见图6。
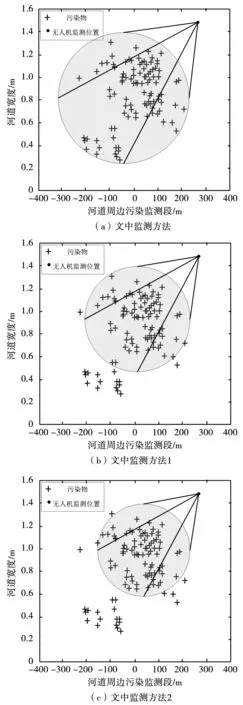
图6 河道周边水体表面污染物分布状态监测
图6中,正数值和负数值表示不同河道方向。根据上述测试结果可以看出,在同样的测试背景条件下,文中方法的监测范围,完全覆盖了河道周边污染位置。而两个传统方法的监测范围,只局限在一个固定的区间内,当水体表面污染物分离时,没有追踪分离部分的污染物位置。综合上述测试结果可知,此次基于无人机的远程监测方法,具有更好的监测效果。
3 结 语
此次研究将传统远程监测方法作为参照,利用无人机替换传统监测方法中的硬件设施,依靠无人机多变动的特征,实现对河道周边污染的全方位监测。根据实验测试结果可知,此次研究的远程监测方法取得了不错的研究成果,但由于时间与个人精力限制,该方法还存在两点不足之处:第一该方法的计算过程较为复杂,稍有不慎就会使无人机偏离监测线路,影响最终监测结果;第二设置的实验周期较长,若遇见恶劣天气则无法启动无人机,会造成实验测试的不连续性。因此在今后的研究工作中,可以设置一个更加精简的算法模型,控制无人机监测线路,同时可以利用仿真实验,防止恶劣天气影响实验测试结果。
