航海船舰自适应多维预测算法设计
2021-06-08贾海云
贾海云
(合肥财经职业学院 人工智能学院,安徽 合肥 230601)
使用高分辨率距离像(High-Resolution Range Profile,HRRP)[1]技术可以很容易解析出待测目标的特征数据.这一优势使得HRRP技术被广泛地部署在目标检测领域,比如对航海船舰实施精细计算以便对目标进行精确归类.然而航海中的船舰类型众多且待测目标的造型、结构等特征区别较大,无法搜集所有船舰的数据.这就限制了该技术在个体目标精细归类方面的普适性.一种行之有效的方法是利用高分辨雷达目标一维距离像(High Resolution Rodar Profile One-dimensional Distance,HRRPOD)技术预测出航海船舰属于民用还是军用,再考虑是否继续对所预测的军用船舰做深度定位测算分析.HRRPOD技术的实施是通过读取待测目标的多维特征数据来实现,甚至各维特征数据彼此之间可通过互补分析来进一步增强预测精度.本次研究引入HRRPOD技术并通过改进传统特征识别机制来设计一个航海舰船自适应多维预测算法.
1 船体测量
由于航海舰船所对应的HRRP参量包含了除待测船只以外的海上噪声.此前的相关研究给出了解决该现象的方法是:首先确定船体在航海中的投影长度、姿态、实际长度等来对HRRP参量实施门限[2]处理;然后再计算出待测船体的面积所对应的距离单元来测评船体的长度.另有研究方法是通过获取波高谱来确定波长幅度的表达式,再根据该表达式的周期性测评出船体的长度.为克服上述研究的鲁棒性问题,本文构思通过分析船体能量来确定航海船体长度的方案.该方案实施步骤如下:
首先,假设通过HRRPOD技术提取的HRRP数据为va,并令数据规模为i,a≤i.对该数据做归一化处理,于是可得:
Gva=
|MIN[va]-va|/|MIN[va]-MAX[va]|.
为消除HRRP参量噪声需对Gva做低通滤波,处理后的数据记作Oa.
其次,宏观确定航海船舰端点的方位.令Tb和Tc为源点和宿点的方位,j和k为源点和宿点的数据长度,且b≤j,c≤k.定义l=±0.02为源点和宿点的阈值.于是对差分Oa实施归一化处理表示为:GOa=[(Oa+1-Oa)/MAX(Oa+1-Oa)]·(1/2),将GOa中未达到-0.02阈值的值视为宿点Tc,将GOa中超过0.02阈值的值视为源点Tb.
然后确定航海船舰的起止点.将待测源点和宿点在测试时的能量值记作PQ和Pz,将低通滤波单元的时延置零并生成待检波S.S从波形的边缘两端开始扫描,并设定Oa中所有端点的幅度总和为能量.由于航海船体自身的幅度远超过船体之外的幅度,因此通过分析待测端点两边的能量数据和阈值大小关系即可读取出船体的起/止方位WQ/Wz.
界定船体起/止方位的具体实现过程为:
2 类型评估
将不同类型的航海船舰HRRP数据任意划定一半作为测试样本[4],任意划定一半作为训练样本.将这些数据做低通滤波降噪处理再进行归一化,然后计算船体的起止点并获取归一化后的船体区域数据以解决幅度和平移敏感等问题.由于此前关于特征计算的相关研究中只讨论一维特征数据,不能精确区分船舰类型.故在此处的类型评估中通过计算不同维度的特征参量来统筹分析航海船舰的类型.假设归一化后的HRRP特征数据序列串为X(t),特征维度为T,令t=0,1,2,…,T-1.多维特征参量计算如下:
(2)峰波长度B=g{t|X(t)≥fMAX·0.4},
其中g为符合该计算式的t的数量,fMAX指HRRP峰值中最大的值.
(3)HRRP数据峰值规模
S=g{t|X(t)≥fMAX·0.4,
X(t)>X(t+1),X(t)>X(t-1)}.
相对而言,军用船舰的结构比民用船舰结构要复杂,加之船体体积不大,因此HRRP特征数据的峰值也较小且峰值规模数量相对较多.而民用船舰结构不如军用船舰复杂,其峰值规模数量相对较少.故该峰值规模的计算式可用于区分船舰类型.
(4)方差
(5)起伏均值
该值越大说明船舰越复杂.相比之下,民用船舰的结构简单起伏均值也较小.
(6)差分起伏
(8)中心矩阵
该度量值越大,说明散射中心在船舰上的布局船越集中.
民用船舰的船楼位置通常在船体中间靠前或靠后,而军用船舰的船楼基本上位于船体的中部.故军用船舰的中间性参数具有良好的对称性[5].


假设对Hr中第a列特征参量进行特征处理后的平均值为ma,则对Hr进行特征加权处理后的平均值集合为Mr=[m1,m2,...,ma,...,m10].假设对Lr中j行a列的特征参量做加权处理后的值为wa,则第j行的特征数据集合为Wj=[w1,w2,...,wa,...,w10].然后算出Mr和Wj的最短欧式间距[6]来区分样本值类型.令类型r的船舰中第j个测试样本值为Wr-j,Ur-j为结合最短欧式间距把测试样本值j认定为类型r,于是设置认定标准Ur-j=MIN‖Mr-Wr-j‖2.若算得‖M1-Wr-j‖2值比‖M2-Wr-j‖2大,说明Wr-j属于民用船舰,反之属于军用船舰.

3 最佳特征提取
此前关于特征融合提取的常用放大是采用Fisher准则.然而该准则在区分待测目标类型过程中只是考虑一种特征.如果考虑选择多个特征参量,那么将因彼此之间具备较高关联度而使得区分效果降低.针对该问题,本次考虑从众多的特征参量中提取出最能完全代表船舰结构特性的最佳特征参量,并设计科学的分类器辅以自适应预测船舰类型.实现过程如下:
令a=[1,2,...,10],首先依次为10个特征参量计算出基于Fisher的区分系数:
然后求得区分系数的关联度:
若算得该值较大说明特征参量彼此之间具有很强的关联性.令Tn为船舰的第n个特征参量,tm和Tn之间特征关联系数为R(tm,Tn),于是可得10个最佳参量依次如下:
T1=MAX{λ1,λ2,...,λ10},
T2=MAX{λa-|R(tm,T1)|},
T3=MAX{λa-|R(tm,T1)|-|R(tm,T2)|},
…
自适应多维预测系统的实施除了提取最佳参量还需分类器的参与.本次关于船舰目标类型区分的研究选择较为常用的支持向量机[8]的分类器.
4 算法测试与分析
算法成效在很大程度上取决于测试样本值和训练样本值的定义.为了客观反应算法效益,本次把民用船舰和军用船舰的距离像特征形成两个矩阵,并使每一个矩阵样本生成一个任意数组.任意选取其中一半作为测试样本值,另一半作为训练样本值.经过150次的测试后统计数据的均值形成预测精度.
图1为多维特征参量在进行最佳特征加权处理前后,支持向量机分类器对航海船舰类型的预测精度.从曲线走势不难看到,船体的10个特征参量经过自适应多维预测算法的最佳特征加权处理之后将使算法的预测精度提升.这足以表明在多维特征融合下的目标类型预测中,自适应多维预测算法的最佳特征加权处理机制在支持向量机的分类器识别中扮演了重要的角色.换言之,自适应多维预测算法偏好于差异性较显著的特征量加权行为,疏于差异性较弱的特征量加权行为.显然该特点有益于提升自适应多维预测算法的动态可用性.
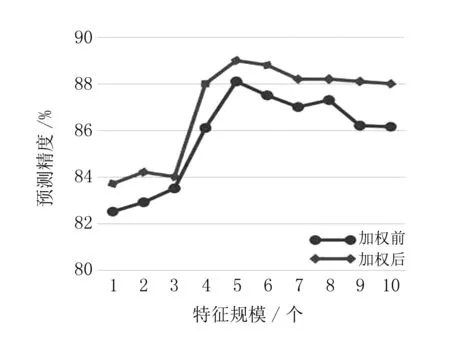
图1 加权处理前后的预测精度
传统特征提取策略和基于自适应多维预测算法中最佳特征提取策略两种方案下的预测精度对比情况如图2所示.从曲线走势可以看到自适应多维预测算法中采用的最佳特征提取策略在读取到5个特征参量时其预测精度达到最高.相比之下,传统特征提取策略在读取到7个特征参量时预测精度才达到最高.与此同时,在两种策略读取到第5个特征参量时基于自适应多维预测算法中最佳特征提取策略的精度高于传统特征提取策略.显然,自适应多维预测算法无论在计算资源成本和时间代价方面均优于传统特征提取策略.

图2 不同特征提取策略下的预测精度
5 结语
本文从多特征融合角度出发为航海船舰设计一个基于船体类型预测的自适应算法.算法在梳理传统研究方案改进空间的基础上以计算时间代价和计算进度为目标设计了一种最佳特征提取处理策略.测试表明,所设计的航海船舰自适应多维预测算法具有一定的科学性和普适性.
