基于无人机可见光影像的华山松人工林计测参数提取
2021-06-08袁梓健舒清态赵洪莹王柯人谭德宏
袁梓健,舒清态,赵洪莹,王柯人,谭德宏
(西南林业大学 林学院,昆明 650224)
0 引言
在陆地生态系统的功能运转中,森林是极为关键的组成要素,会对碳水资源的顺利循环以及气温气候的调节等起到重要的影响作用。单木是森林空间结构中的重要组成,有效地获取详细的单木结构参数能够帮助我们更好地掌握森林资源信息。传统林业信息统计与调查工作需要经由实地测树以及抽样等方式[1-3],明确相当范围内的树木生长相关的分布以及质量等信息[4-9]。此种调查模式下,测量人员自身的工作情况将会影响到调查结果,呈现出很强的主观性特点,而且大范围的统计需要耗费很大的人力与物力资源,整体的效率水平偏低[10-11]。伴随着科技的持续发展与进步,人们尝试将遥感技术引入到森林调查工作中,并且凭借着自身数据处理信息快及能够大范围进行测量等优势而被广泛运用到林业发展等诸多生产领域[12-13]。20世纪七八十年代,国内就在着手利用遥感技术来实现森林资源相关的调查统计工作,尤其是使用航空像片完成的森林蓄积量分析成果显著。而且,所得像片的正射影像图能够更加清晰地将实地森林情况展现出来,为更好地实现现代化的林业经营及生产发展等工作提供信息参考[14]。基于此,宫鹏[15]使用数字摄影测量相关技术与理论完成橡树草原相关生长情况的探测研究,针对其树高以及郁闭度情况进行记录;王二丽等[16]基于凉山自然保护区0.2m分辨率的航空像片,选取子像元分类的处理方式来获得其云冷杉、落叶松以及红松相关的分布情况,构建得到提取冠幅及其实测冠幅相关的回归模型,各区目视解释精度都超出80%,成效显著。从近些年的发展来看,Popescu等[17]尝试采取基于局部最大值法来对树顶点进行提取的方式以获得单木数量,针对阔叶树及松树相关的样地林分密度进行预估,所得估测值与其实测值呈现的相关系数都要超过0.66;Koukoulas等[18]选择应用冠层高度模型获得等高线的方式来分割单木树冠,在落叶阔叶林的分析中,使用该方法获得的树顶精度显著超出LiDAR数据,精度能够达到91%;Kwak等[19]经由数据估测的方式来研究日本落叶松以及韩国红松相关的单木树高情况,并且使用形态学影像分析及局部最大值来提取数字冠层模型内的树顶点,对比实测值明确其评估精度维持范围为67.4%~86.7%。
华山松(PinusarmandiiFranch.)是云南省广泛栽植的用材树种。近年来,华山松人工林和天然林的经营规模和种植面积不断增加,在经济、社会发展和生态安全中占据着重要地位[20]。本文以石林县国有林场华山松人工林为研究对象,以样地实际调查数据结合无人机影像数据,通过两种不同的单木分割方法,得到单木计测参数,以期为华山松人工林的动态监测提供参考。
1 研究区概况及数据获取
1.1 研究区概况
石林县处在滇东高原腹心,地面起伏和缓,切割较轻。山脉统属云岭余脉,沿县境东西两侧向东北展布延伸,整个地势自东向西呈阶梯状倾斜。平均海拔1 737m,属低纬高原山地季风气候区,雨量充沛。研究区位于云南省昆明市石林县国有林场(北纬 24°30′~25°03′,东经103°10′~103°41′)。此国有林场的总面积为4.46万hm2,其中林业用地面积为3.45万hm2,约占总面积的77.35%。
1.2 无人机数据获取
2019年11月19日中午进行无人机数据的采集工作:此日晴空万里无云,并且风速相对较小,能够很好地满足无人机工作的要求;选择中午,能够减小树冠的阴影面积对后期数据处理的误差。
实验选用的无人机为大疆-悟系列(Inspire),相机使用专业级三轴增稳云台相机(型号:禅思 Zenmuse X4S)。飞行前对无人机传感器进行校准,在飞行区域内布设3个像控点,并进行参数设定(航向重叠率设置为75%,旁向重叠率设置为65%)。飞行速度7.1M/S,飞行高度为100m。
1.3 样地数据获取
选取石林县国有林场内301林班12小班内共5块边长为28.28m方形标准样地(图1)。使用南方测绘(T66 RTK)进行样地四角拐点的单木坐标获取,使用全站仪采集样地内华山松单木坐标,使用激光测距仪测量单木树高,使用胸径尺测量样地单木胸径,使用皮尺测量单木东西冠幅以及南北冠幅。样地调查数据(胸径、树高、冠幅)概况如表1所示。
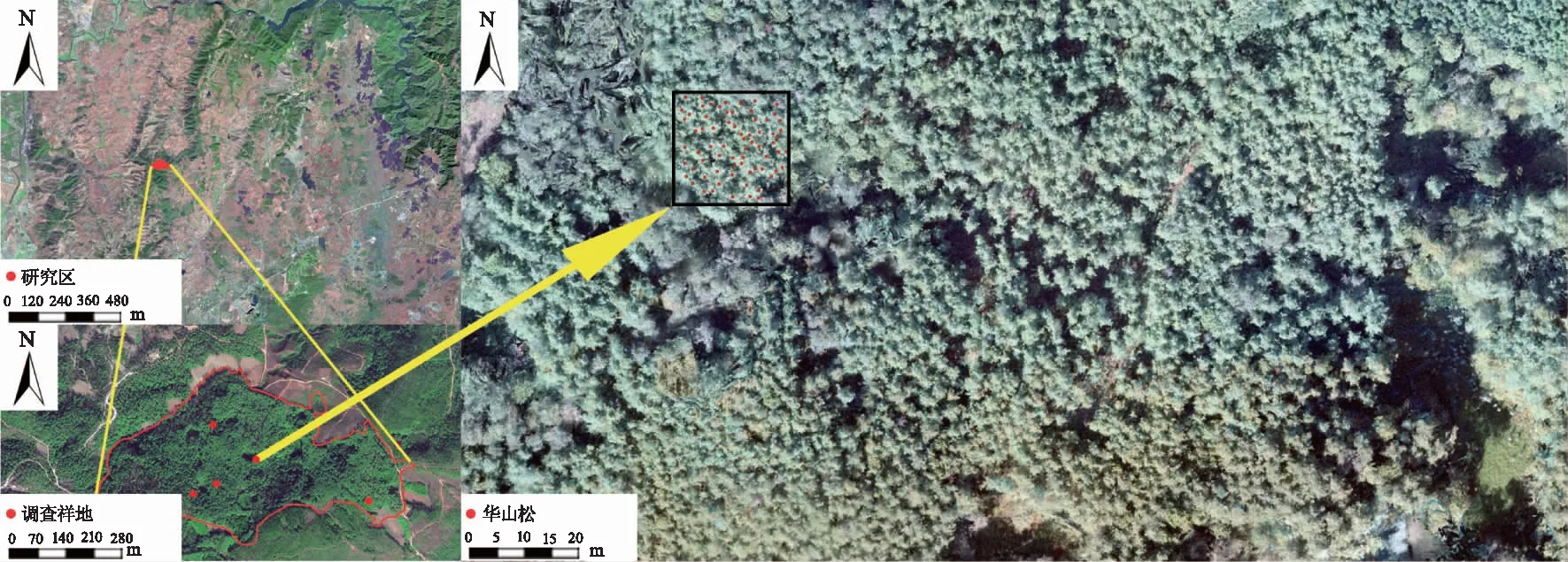
图1 研究区的样地及样木Fig.1 Sample land and sample wood in the study area

表1 样地数据概况Tab.1 Overview of sample site data
2 研究方法与数据处理
2.1 单木分割方法
2.1.1基于冠层髙度模型的单木提取方法
冠层高度模型(CHM)能够表达林分中每棵树木的枝叶到地面的垂直距离。由于华山松的冠层大体分布呈现伞状,边缘位置相较地面偏近且中心位置相较地面偏远,故而绘制得到的CHM灰度图像内,单木表现是近圆形状,边缘值偏小,中心值高,图像中冠状最大值就是单木的最高点位置,基于局部最大值探测来实现具体的单木提取工作。将可变圆形窗口设置为探测窗口(图2),将所得局部最大值标作树顶来完成统计。
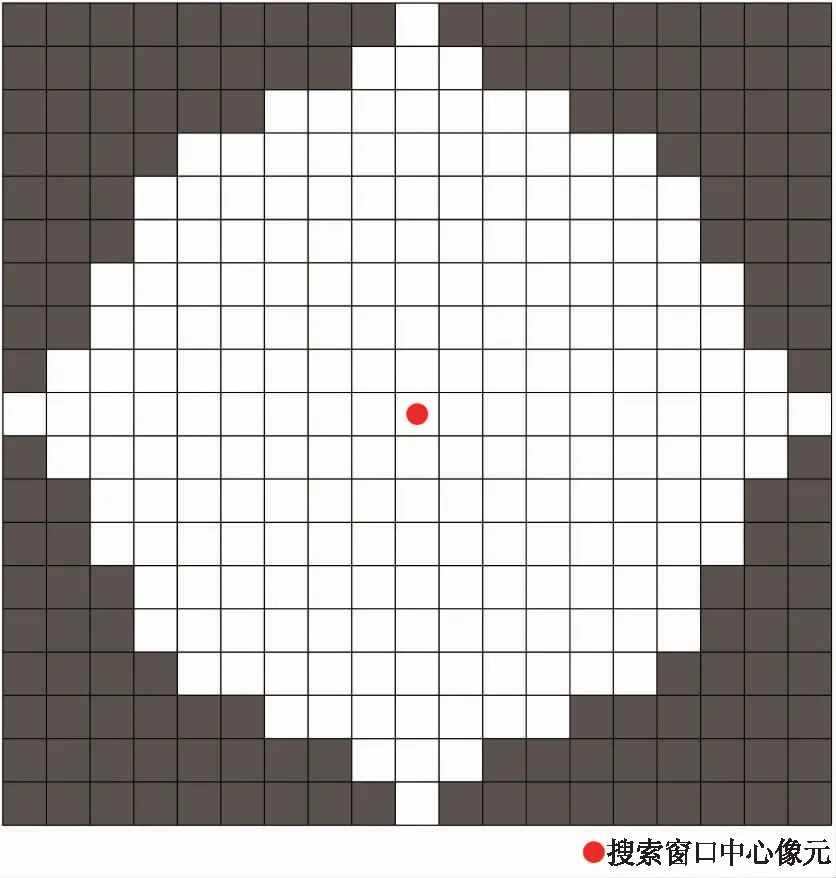
图2 圆形探测窗口Fig.2 Circular probe window
2.1.2基于点云分割的单木提取方法
利用原始航片和地面控制点生成调查样地的三维点云数据模型。点云数据中的高程值不仅包含了样地内树木、灌木丛等高程,而且还包含了地面点高程。因为研究区所在地地势高低起伏,由于地面高程值叠加的影响作用存在,高大树木所得高程值存在小于低矮树木的情况。如此,不能够顺利经由点云数据提取的方式来展现单木的高度信息。因此,在对华山松展开提取研究期间,需要对点云数据进行归一化操作,将地面点高程值由所得高程值内减掉,所得的数据就是地物的实际高度。使得点云数据与没有归一化之前形成对比,呈现华山松人工林的真实形态。
该算法从种子点A(即全局最大值)开始(图3)。主要根据间距临界值和最小间距规则,通过对更低的点进行估计,将种子点A发展为一个树聚类。例如:A点是最高点,因此将点A作为一号树木的树顶(目标)。此时把低于A的点相继进行分类,首先,点B被分类成二号树木,因为间距dAB大于一个设定的临界值;然后设置点C,点C相对于B点又可定义为二号待分割点的二号树木。因为dAC小于dBC,通过与点B和点C比较,点D相对于点C又被分类成二号树木;通过与点C和点D的比较,点E相对于点D又被分类成二号树木。临界值应当与冠层半径相等,当设置临界值太大或太小就会出现分割不足和过度分割的情况。
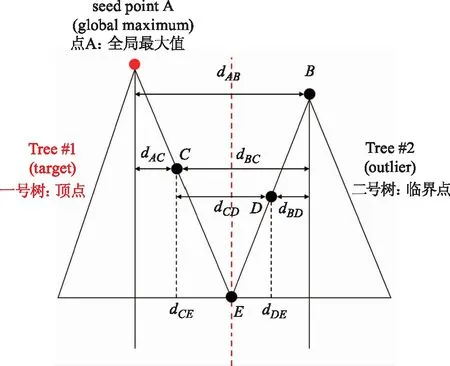
图3 点云分割算法原理Fig.3 Principle of point cloud segmentation algorithm
2.2 华山松人工林蓄积量模型建立及精度验证
2.2.1蓄积量估测模型
选取5块标准地的华山松纯林为研究对象,对两种方法所提取的冠幅和胸径与外业调查的数据进行一次多项式函数和二次多项式函数拟合,并建立华山松二元材积方程(表2)。
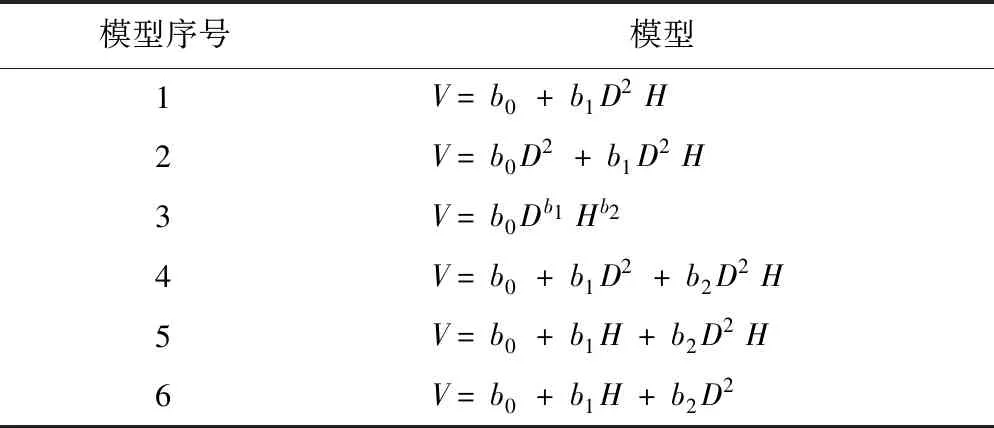
表2 二元材积模型估测方程Tab.2 Estimation equation of binary volume model
2.2.2精度验证
本研究建立的模型由决定系数(R2)、均方根误差(RMSE)进行模型精度验证和评价。
1)决定系数(R2)。
采用决定系数(R2)对估测模型进行精度检验,R2的变化范围在0~1之间,值越大,表明自变量与因变量之间的相关性较好,模型精度高。表达式为:
2)均方根误差(RMSE)。
均方根误差(RMSE)用于量化模型精度,RMSE值越小,表明模型预测效果越好、精度越高。表达式为:

2.3 数据处理
本研究5块样地共采集无人机遥感影像875余张,利用无人机数据处理软件Pix4D mapper 生成样地的数字表面模型(DSM)和数字正射影像(DOM),用DSM与已有的DEM高程模型相减获取调查地的冠层高度模型(CHM),并利用调查样地时设置的控制点与原始航拍数据生成调查地点云数据。
3 结果与分析
3.1 株数的提取结果与验证
实现单木分割的关键所在就是顺利由CHM冠层高度模型内获得单木树冠最大值,进而完成单木标记。考虑到树冠最大值所在位置就是树顶点,故而选取局部最大值来实现树顶点相关的识别工作。由于所调查标准地内的华山松基本是同一年种下的人工林且为单层林,冠幅长势相对较为平均,所以采用固定窗口对最大值进行识别。由于华山松在生长时,冠幅越大的单木对应的树高和胸径也是在逐渐变大,所以窗口的大小通过树高与胸径和冠幅之间的关系确定,所以根据5块标准地内实测数据建立树高与胸径和冠幅之间的联系。
通常局部最大值的识别窗口为正方形。但是本文的研究对象为华山松的树冠区域,树冠的投影近似为圆形,若使用正方形窗口则会对我们的识别有一定影响,所以,选择使用圆形窗口对冠层高度模型进行局部最大值的识别误差就会减小。搜索窗口通过树高与冠幅、胸径进行拟合得出结果。比如:若圆心处像元值为15,通过树高-冠幅、胸径拟合结果求得冠幅为9.4m即为圆形搜索窗口直径;树冠假定为圆形,则树冠半径即为4.7m;所使用的CHM空间分辨率为0.4m,对应识别窗口像元值为11。
在5块调查样地内,地面实测共计获得443棵单木,通过两种单木提取方法提取单木株数与实测地面单木位置进行对比(表3),未分离株数是指一定范围内没有提取出任何单木,过度分离株数是指一株单木被分离成了多株单木。
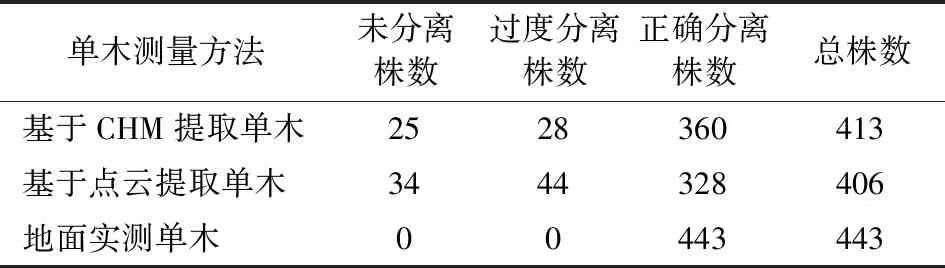
表3 株数提取对比分析Tab.3 Comparison of plant number extraction and analysis
两种提取单木属性的方法所获得的单木数量都小于样地实测的单木数量,5块样地中基于生成的点云数据分离了406棵树,基于CHM分离了413棵树。由于地势、冠幅遮挡等影响,提取到的单木与实际单木数据对应会存在一定误差。利用实测的单木坐标位置与提取到的单木数据进行对比。在对比的过程中,主要发现单木分割会出现未分离,多分离的错误分割。未分割指由于冠幅过于密集,在大范围内并没有分割出单木;多分离是指在大范围内一棵单木被分割成了许多单木。
基于CHM的单木提取,没有被分割的单木与实测数据相比,均为树高较小的单木。在CHM上的像元值较低,就使得一部分低矮单木无法通过像元大小被识别出来,造成了漏分的情况。
基于CHM的单木提取共分离出 413棵树,通过与5块样地实测单木坐标数据对比,删除误差较大的单木,还有360棵树能够正确被识别,分离正确率为87.17%;基于点云数据的单木提取共分离出 406棵树,通过与5块样地单木坐标实测数据对比,删除误差较大的单木,还有328棵树能够正确被识别,分离正确率为80.79%。
3.2 树高的提取结果与验证
分别将两种单木分割方法所得树高与实测值进行分析比较,两类方法所得树高与实测树高均表现出很强的线性相关。其中:基于CHM所得树高h1与实测值h两者的R2对应是0.71,相应的回归方程式为h=0.7183h1+3.5542(图4);基于点云分割所得树高h2与实测值h两者的R2对应是0.69,相应的回归方程式为h=0.7854h2+2.9254(图5)。
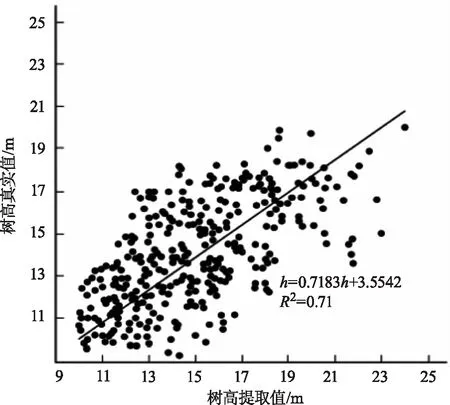
图4 基于CHM提取树高相关性分析Fig.4 High correlation analysis of tree based on CHM
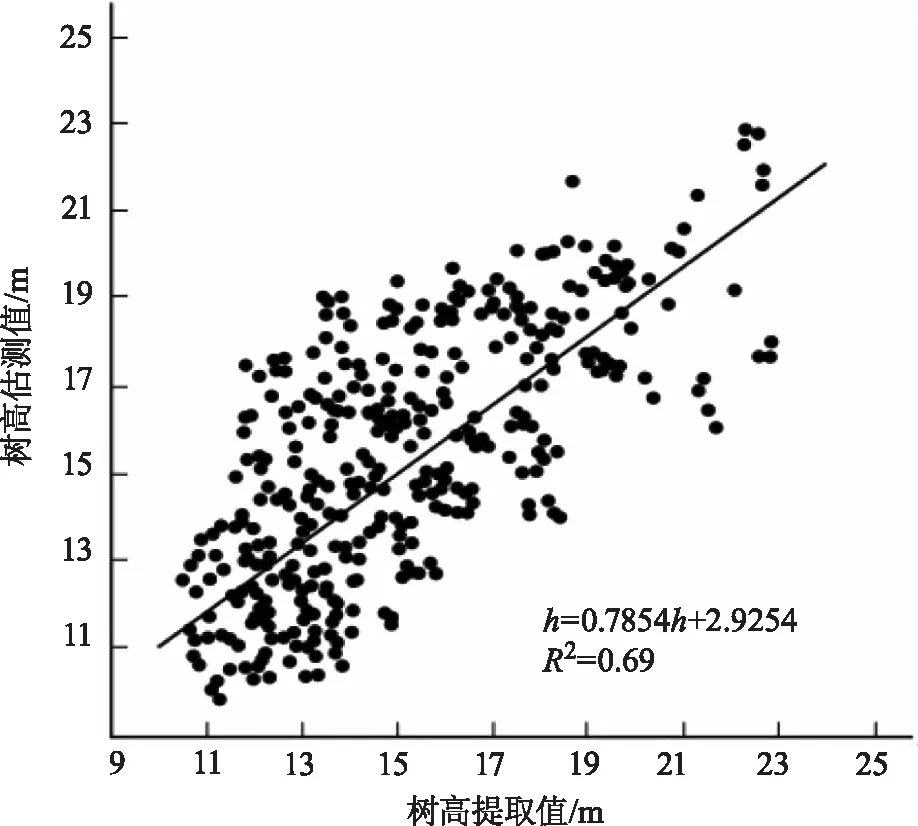
图5 基于点云提取树高相关性分析Fig.5 High correlation analysis of tree based on Point Cloud
3.3 蓄积量的估测与验证
由两种方法精度对比可以得出,基于CHM比点云的单木计测参数的提取精度高。通过对CHM单木分割获取的单木参数进行D=a+bCW+cH的模型估测(D为单木胸径;CW为单木冠幅;H为单木树高;a,b,c为常数)。所得胸径—冠幅、树高模型为D=1.76+4.66CW+0.27H。
用统计分析方法建立的模型,其计算结果影响到林业数表应用中的可靠性和森林经营决策的正确性。建立单木材积与胸径、树高模型,使用最小二乘法进行回归模型的建立。采用最小二乘法建立回归模型的误差应该满足“独立、正态、等方差”条件。进行多元非线性回归计算参数值;査云南省华山松二元材积表,得出实测单株材积;经由模型相关的拟合研究可得详细的单木二元材积模型参数值。石林县国有林场华山松人工林二元材积模型拟合结果如表4所示。
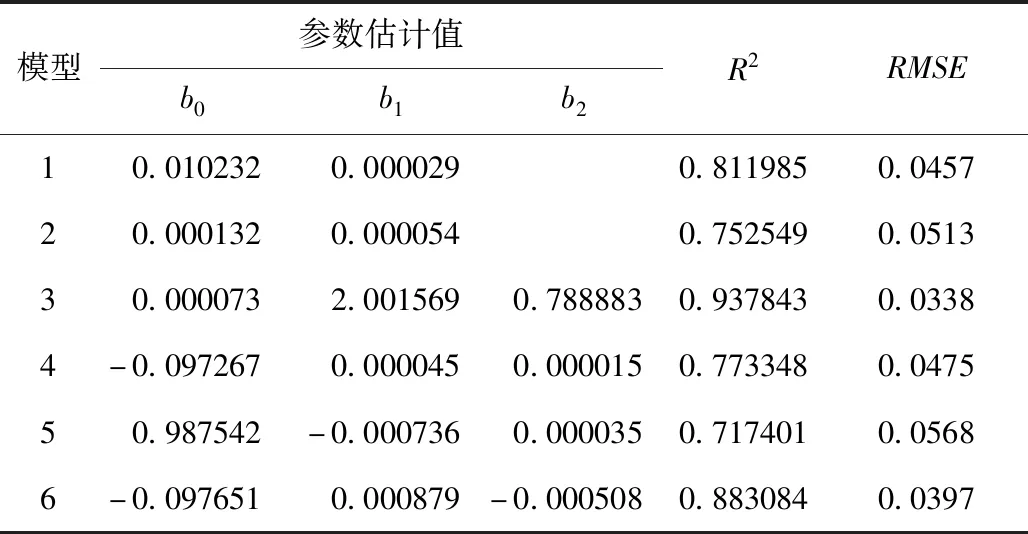
表4 石林县国有林场华山松人工林二元材积模型拟合结果Tab.4 Fitting results of binary volume model of P.armandi in State-owned forest farm of Shilin county
通过上述材积模型的建立,由表4可知,模型3的拟合程度最好。虽然二元材积模型拟合不能只看精度,但模型3在国内外二元材积模型表达式中应用较广,并且也符合我国的二元材积表编制公式。模型3决定系数(R2=0.937843),均方根误差(RMSE=0.0338)具有比较好的拟合度和使用性。选用模型3作为最优材积模型,其表达示为V=0.000073D2.001569H0.788883;将已求得胸径-冠幅、树高模型带入已知参数中,得到最优单木二元材积模型为V=0.000073(1.76+4.66CW+0.27H)2.001569×H0.788883。根据最优单木二元材积模型公式,分别计算5块样地的对应蓄积量。其计算结果如表5所示。
4 结果与讨论
由提取单木得到的冠幅以及树高等相关参数完成评价分析,明确使用CHM能够在样地内分离获得413株单木,与实测得到单木株数的正确匹配量是360棵,准确率高达87.17%;使用点云分割能够在样地内分离获得406株单木,与实测得到的正确匹配量是328株,准确率高达80.79%。表现出显著的欠分离问题。提取得到的树高与其地面实测所得树高的R2相比较,使用CHM方法,R2为0.71;而使用点云算法,R2为0.69。提取所得数据相较实际所得数据呈现出很大的偏差现象。针对各项参数评价情况进行综合判断可知,基于CHM实现的单木提取效率更加突出,可以更加充分地展现森林中单木具体的分布情况及其参数信息。
无人机数据具有便携性、采集数据快等特点。本文由无人机原始航片生成样地点云数据,以及通过样地模型数据生成冠层高度模型。两种方法具有一定的便携性和可行性,但是对本研究可言,也存在一定误差。1)在对CHM使用最大像元值窗口搜索时,会存在少部分的无效像元值,这对后续的冠幅分割会产生一定的影响;2)使用的点云数据为无人机原始航片生成,地形因子在点云归一化会后存在一定的影响;3)无人机数据源也是重要的误差来源,无人机在采集数据时,像控点的选取对生成正射影像及生成点云数据会有一定的误差;4)样地采集数据过程使用南方测绘(T66 RTK)测量单木坐标,由于林场内信号较弱,RTK的固定解坐标会存在一定误差,对后续单木坐标的定位存在影响;5)在测量单木计测参数时,由于所在样地为人工林,林分结构完整,对于树高及胸径的测量能够减少后续数据处理的误差,但是测量冠幅时,存在冠幅被遮挡、生成弯曲等情况,导致冠幅的测量结果存在一定的误差。在今后的研究中,为了提高无人机估测森林计测参数,应该减少数据获取过程中带来的误差,以达到更高精度的单木计测参数的提取。
