一种特殊作业环境下生命保障定位装置
2021-06-07袁梅
摘 要:文章设计一种特殊作业环境下的生命保障定位装置,由核心控制器模块、生命体征监测模块、定位模块、LoRa通信模块、双目摄像头模块等组成。多模式定位技术实时获取作业人员定位信息,生命体征传感器监测作业人员体征指标,双目三维重建技术采集作业环境立体三维信息,使用自组网的LoRa通信模块把实时数据无线数据传输回指挥中心,以便解决特殊作业环境下出现紧急危险情况时无法快速实时获取作业人员信息,而延误救援方案的问题。
关键词:生命体征;双目三维重建;LoRa;惯性导航
中图分类号:TP311 文献标识码:A文章编号:2096-4706(2021)24-0069-06
Abstract: This paper designs a life support positioning device under special working environment, which is composed of core controller module, vital signs monitoring module, positioning module, Lora communication module, binocular camera module and so on. The multi-mode positioning technology obtains the positioning information of operators in real time, the vital signs sensor monitors the physical signs of operators, the binocular 3D reconstruction technology collects the 3D information of the working environment, and uses the Lora communication module of ad hoc network to transmit the real-time data wirelessly back to the command center, so as to solve the problem of delaying the rescue plan due to the inability to obtain the information of operators in real time in case of emergency and dangerous situations in special working environment.
Keywords: vital sign; binocular 3D reconstruction; LoRa; inertial navigation
0 引 言
在生产和建设过程中,企业最关心的是在保障生产安全的前提下提高生产效率,安全生产摆在首位。在一些复杂性、多变性以及应急性的特殊作业环境及场所如消防作业、矿井作业、地下空间作业等,作业人员的作业性质都是呈立体化纵深地理位置分布,管理范围较大。在工作进行时,管理人员无法准确的了解作业人员的位置、工作情况、具体地点分布等相关信息,也就无法第一时间掌握和了解到作业人员所遇到的情况,出现事故时无法做出及时反应,没法建立一套生命保障安全调度机制,耽误救援。比如在消防火灾救援、开矿作业和野外旅游探险等,外部人员无法知道相关的具体位置,因此需要设计一种安全快速定位装置。针对特殊作业环境对作业人员生命保障和定位的需求,本文提出一种特殊环境下的生命保障定位装置,将GPS、北斗、陀螺仪多组合定位技术、嵌入式、LoRa无线网络技术、摄像等技术应用于消防、煤矿、地下通道等复杂环境下特殊作业的领域,实现对工作人员的精准定位、路径跟踪和保障网络通畅。随时掌握工作人员的分布状况、运动轨迹和健康指标,解决现有消防火灾救援等特殊作业下无法快速获取相关人员的具体位置和生命体征的技术问题,实时定位特殊作业人员的位置和接受外部的调度命令。
1 结构设计
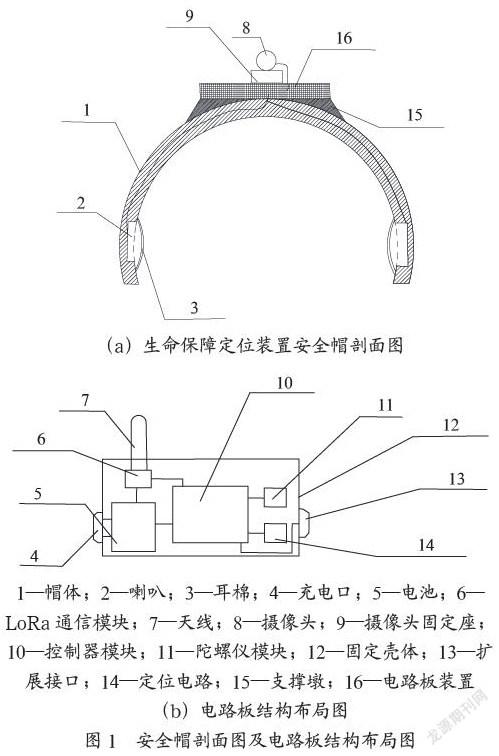
生命保障定位装置电路板结构布局图如图1(a)所示,其装置安装在安全帽上,剖面图如图1(b)所示,设备装置主要由外壳、卫星定位天线、卫星定位模块、陀螺仪模块、交互模块、显示模块、控制模块、无线电天线、编解码模块、扬声器、对讲控制开关、拾音麦克风等组成,集成在一块电路板上,通过外壳实现整体的封装,集成在安全帽帽体上,实现对人员定位和生命体征监测的功能。帽体顶部设置有固定壳体,LoRa通信模块、控制器模块、陀螺仪模块和定位电路设置在固定壳体内,LoRa通信模块的天线穿过固定壳体,并设置在固定壳体外。固定壳体内还设置有电池,电池固定壳体外设置有充电口,所述充电口与电池连接,所述扩展接口设置在固定壳体外。摄像头设置在固定壳体顶部,且摄像头与固定壳体之间设置有摄像头固定座。
2 系统框架设计
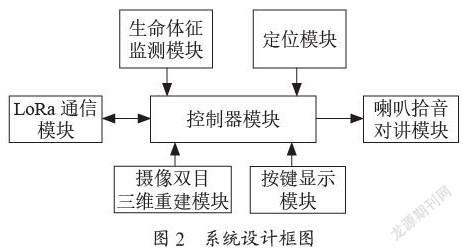
根据生命保障定位装置的主要功能为定位功能、LoRa无线通信功能、摄像双目三维重建功能、生命体征监测功能,系统设计框架如图2所示。
2.1 定位功能
设备采用北斗GPS双模定位和陀螺仪模块定位技术进行互补融合的室内定位,北斗GPS双模定位提供户外平面定位信息,然后加上室内采用陀螺仪传感器模块定位,得到定位人体的具体位置,实现对复杂作业环境作业人员的精准定位及路徑跟踪。
定位模块北斗GPS有卫星信号时,实时采集定位的信息,陀螺仪模块同时也实时记录人运动方向的数据,比如向前走五米,或者向上走三米,或者斜向上走五米等,对数据进行记录,然后当有卫星信号时,与定位信号进行组合,增加室内方向的位置信号,实现定位,如果为没有卫星信号时,即是在设备开启时由陀螺仪模块记录人员的移动的位置,然后经过LoRa通信模块传给外部。陀螺仪模块进行室内空间定位与GPS卫星定位数据相互校正,不管在室内或者户外,都能实现作业人员位置的精准确定。
2.2 LoRa无线通信功能
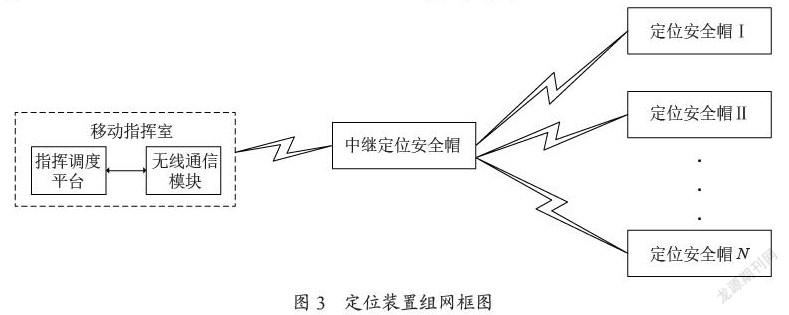
当建筑发生火灾、矿井发生坍塌等事故时,因内部空间的密闭性、房屋钢结构的屏蔽作用等,使得超短波通信信号无法全面覆盖。在事故救援现场,通信网络不畅导致现场指挥和救援混乱,现场指挥调度中心也形同虚设,不能合理地安排救援力量。生命保障定位装置均设置有LoRa通信模块,带有生命保障定位装置的安全帽如果在与移动指挥室的通信范围内可直接通信,如果不在通信的距离范围,需要生命保障定位安全帽广播给周围的生命保障定位安全帽,当有其中一个应答时,说明该生命保障定位安全帽与移动指挥室可以通信,则此时,无法与移动指挥室连接的生命保障定位安全帽,会经过另外一個生命保障定位安全帽把信号发给移动指挥室,实现组网,该组网为现有的组网连接方式,如图3所示。实现了特殊作业的情况,有一些地方没有信号时,也能与外部通信。
2.3 生命体征监测功能
生命体征监测采用的传感器包括人体体温、心率脉搏等检测传感器,均设置人体表层,与控制器模块连接,实现采集数据,可实时获得作业人员的生命体征指标,如作业人员健康受到威胁时,指挥中心可第一时间掌握信息,根据定位信息和身体体征,开展救援工作,保障作业人员的生命安全。
2.4 摄像双目三维重建功能
特殊作业环境的复杂性、多变性以及应急性,需要对作业环境进行现场绘制三维线框地图。采用摄像头双目立体视觉法能实现空间坐标重建,分为图像获取、特征匹配和重建三个步骤。图像获取是由不同位置的两台摄像机获取同一物体的过程;特征匹配是在两幅图片中通过特征关系,寻找对应点的过程;重建就是根据匹配点对应关系计算目标点点空间坐标的过程,将重建现场立体三维线框数据,发送到指挥调度系统生成现场作业环境的立体三维线框地图,有效掌握作业环境信息和作业人员分布信息,对指挥调度提供有效的信息。
3 硬件设计
生命保障定位装置的控制模块采用STM32F407核心,定位模块采用惯性导航模块WTGPS-300,无线数据传输采用的是LoRa无线通信SX1278扩频,摄像头采用OV9732,血氧浓度检测选择MAX30102芯片,人体温度传感器采用MAX30205。硬件框图如图4所示,硬件原理图如图5所示。
3.1 控制模块
STM32F407是一种高性能微控制器,有着很强的抗干扰能力,集成了单周期DSP指令和浮点单元 (floating point unit, FPU),提升了计算能力,可以进行一些复杂的计算和控制,此外,还提供了丰富的数字外设,为定位装置连接外接模块提供便捷。
3.2 定位模块
定位模块采用惯性导航模块WTGPS-300模组,体积小,高灵敏度、低功耗、低成本,该模块集成GNSS接收机、6轴惯性传感器能够提供连续的高精度3D定位。卫星信号差会结合惯性传感器的数据信息进行跟踪定位,保证室内精准定位。
3.3 双目三维重建模块
由于双目立体视觉要实现空间坐标三维重建需要图像获取、特征匹配和重建,计算量比较大,因此独立设置一个核心控制器完成目标点点空间坐标计算,该控制器直接与摄像头OV9732连接,控制摄像头图片采样,计算好的现场立体三维线框数据发送给控制模块来进行数据回传。
3.4 LoRa无线通信模块
LoRa无线模块采用SX1278芯片,工作在410~441 MHz频段,TTL电平输出,兼容3.3 V与5 V的IO口电压。具有传输距离远,速度快,功耗低,抗干扰性强的特点;支持空中唤醒、无线配置、载波监听、自动中继、通信密钥等功能,多种传输方式可以实现组网和中继功能,满足作业环境网络不通畅时自组网与外界通信的需求。
3.5 生命体征监测模块
生命体征监测采用了血氧浓度检测传感器模块MAX30100、人体温度传感器模块对人体体征监测。血氧浓度检测传感器MAX30102是一个集成的脉搏血氧仪和心率监测仪生物传感器的模块。MAX30102本身集成了完整的发光LED及驱动部分,光感应和AD转换部分,环境光干扰消除及数字滤波部分,通过IIC接口来读取MAX30102本身的FIFO得到转换后的光强度数值,通过编写相应算法就可以得到心率值和血氧饱和度。MAX30205温度传感器可高精度测量温度,工作在0 ℃至+50 ℃温度范围,高精度和低电压性能,16位(0.00 390 625 ℃)温度分辨率,精度满足ASTM E1112的临床测温仪技术规范。
4 软件设计
生命保障定位装置工作过程主流程图如图6(a)所示。设备开机初始化后,读取生命体征数据、定位信息、双目摄像现场三维数据,采用LoRa无线通信进行信息收发。图6(b)中采集生命体征信息,读取温度传感器数据换算成温度值,读取血氧传感器的数据,该数据为心率值,再将其换算成血氧饱和度的数值。流程图中图6(c)定位信息采集流程图中,采集卫星定位数据、卫星定位因子数和空间定位数据,经过MCU处理,当定位因子数小于n(衡量卫星定位准确度的参数),采用卫星定位作为设备位置信息,校准空间定位数据;当定位因子数超过n,即进入建筑或卫星信号变弱丢失时,采用惯性传感器进行空间定位,记录室内运动轨迹坐标,结合卫星定位和惯性传感器定位信息进行位置信息数据储存。图6(d)中双目摄像采集图像,分别进行摄像机标定、双目图像标定、特征提取、立体匹配出视差图,生成深度图,最后进行三维重建。移动指挥系统管理中心收到采集的数据平台显示如图7所示。
5 结 论
本文通过用GPS北斗卫星定位和陀螺仪传感器定位技术进行互补融合的室内定位,实现对复杂作业环境作业人员的精准定位及路径跟踪,使用生命体征监测传感器实时监测作业人员的健康指标,摄像头双目视觉三维重建技术实现绘制现场作业环境三维地图,通过无线通信网络平台接收到作业人员的定位坐标、生命体征、双目分析的立体三维线框数据,可直接生成现在作业环境立体三维地图,标记作业人员分布点,记录跟踪作业人员的行为轨迹和生命体征,如发生事故,救援人员可根据作业人员定位坐标和作业环境立体三维地图作出抢救方案,第一时间展开营救,提高救援效率和成功率。
参考文献:
[1]王视听.开放式LoRaNET自组网技术应用[J].集成电路应用,2020,37(7):122-123.
[2]牛朝,解振东.基于TDMA的LoRa通信网络设计[J].计算机测量与控制,2019,27(3):206-210.
[3]李波,王坤,王彦本.基于时隙和数据帧的组网算法设计[J].西安邮电大学学报,2019,24(2):26-30.
[4]张仲. 基于惯性导航技术的消防救援定位系统设计[D].哈尔滨理工大学,2018.
[5]宋海云.ZigBee无线定位技术在火灾救援中的应用研究[J].信息系统工程,2018(1):41.
[6]丁王彬,杨化斌.基于双目摄像的特征提取算法研究及三维重建实现[J].信息通信,2017(11):33-34.
作者简介:袁梅(1985—),女,汉族,广西玉林人,讲师,硕士,研究方向:嵌入式、物联网技术。