基于补偿距离评估和一维卷积神经网络的离心泵故障快速智能识别方法
2021-06-03焦瀚晖胡明辉江志农
焦瀚晖, 胡明辉, 江志农, 冯 坤
(1. 北京化工大学 发动机健康监控及网络化教育部重点实验室,北京 100029;2. 北京化工大学 高端机械装备健康监控与自愈化北京市重点实验室,北京 100029)
离心泵是石油化工、冶金、电力及国防工业的一种关键旋转机械,由于其工作转速高、介质温度压力高等运行特点,使其容易发生各种机械故障。同时,虽然大多数离心泵均有备台可切换,但由于其介质部分具有可燃性,导致其故障危害性往往较大,近年来石化企业发生多起由于关键离心泵故障引起的恶性事故,严重影响了流程工业的可靠运行和生产安全。目前在线监测技术已经广泛应用于各类大型企业,但是对于故障识别及诊断主要依赖于现场相关人员以人工的方式,通过监测数据进行趋势分析、频谱分析及包络分析等技术,并结合自身知识和经验对离心泵的运行状态进行判断。随着我国各类企业对无人或少人化生产的推进,上述诊断方式已显示出明显的弊端,主要存在以下两个问题:①人工诊断对人的要求较高,若想实现准确的故障分析,要求相关人员不仅具备全面的故障诊断专业知识和信号处理分析理论,还需具备丰富的实际现场经验;②人工诊断效率难以满足企业大批量离心泵的故障分析需求,各大型企业现场的离心泵数量往往较多,少则数百台,多则上千台,具备诊断能力的专家有限,难以满足及时诊断的需求。因此,离心泵故障的智能诊断是一个亟需解决的问题。
针对离心泵的智能诊断,目前研究主要集中于两个方向:一是基于知识规则的自动诊断,将专家的诊断规则程序化[1-3],但由于人在根据规则进行诊断时带有明显的阈值容偏性,而程序对此难以较好实现,因此该类方法虽然研究的起步较早,但目前仍主要停留在半自动诊断的状态,未实现广泛的工程应用;二是基于故障数据,利用机器学习或深度学习方法进行智能诊断,其研究起步较晚,目前仍处于理论研究阶段。
卷积神经网络是深度学习方法的经典模型之一,具备高度的非线性抽象和拟合功能,不仅在机器视觉和图片识别等领域取得了重大突破[4],也逐渐应用在设备故障诊断领域。在服务于设备故障诊断方面,国内外学者主要开展了如下两方面的探索研究。第一方面,利用传统卷积神经网络,将振动数据转换为二维特征进行故障识别。Zhang等[5-6]提出将一维信号按照规定步长写入二维矩阵,从而将一维信号转化至二维,并利用卷积神经网络识别轴承故障。李恒等[7-9]利用时频变换将时域信号转换为时频图,基于传统卷积神经网络实现不同设备的故障识别。以上方法是卷积神经网络在故障诊断中的大胆尝试,并取得了一定效果。但振动信号作为一维序列信号,各个时刻的数据点具有关联性,若直接将其转换为二维图片,信号中空间相关性会遭到破坏,可能丢失部分故障相关信息。第二方面,将传统卷积神经网络进行改进,直接以振动数据为输入,利用卷积神经网络具有自动特征提取和模式识别的特点进行故障诊断。Sun等[10]提出一种采用双树复小波变换来获取多尺度信号的特征,并利用一维卷积神经网络方法自动识别来自多尺度信号特征的故障特征,通过齿轮故障识别实验验证了该方法能有效识别齿轮故障。Jia等[11]提出DNCNN(deep normalized convolutional neural network)模型,用于不平衡故障识别,并对卷积核学习所得一维特征图的物理意义进行探究。胡晓依等[12]结合卷积神经网络和SVM(support vector machine),提出以时域波形为输入,适用于轴承故障诊断的深度卷积神经网络模型。
基于卷积神经网络建立故障诊断模型的研究已经初见成效,但目前仍存在如下问题:①直接以振动波形、频谱及多域特征打包作为网络输入,造成网络的输入特征维度高,计算量大导致其难以在实时状态监测中应用,同时输入维度高易引入和故障不相关的特征进而导致过拟合等问题;②所需训练样本数量多,而离心泵故障案例数据收集并不容易,训练样本不足则易造成识别准确率低等问题。
针对以上问题,本文提出一种基于补偿距离评估和一维卷积神经网络的离心泵故障快速智能识别方法。首先,为提高单个训练样本的利用率以达到小样本训练的目标,提取时域、频域、时频域及能量等混合域全特征,使网络输入特征尽可能多地涵盖故障相关信息;然后,为同时满足工程中故障识别率和算法运行实时性兼顾的要求,使用补偿距离评估方法对特征集进行预处理,保留与故障有关的特征,去除冗余特征,提高算法效率。最后,以降维后的特征集作为输入,使用一维卷积神经网络实现故障快速智能识别。经实际案例验证,该方法故障识别率高,可利用小样本训练构建模型,同时其特征计算、训练收敛及测试集分析速度快,适用于工程中离心泵的故障智能识别。
1 一维卷积神经网络及输入特征构造
1.1 一维卷积神经网络
传统卷积神经网络是一种前馈神经网络,主要应用于图像、视频等二维数据的识别。卷积神经网络主要由输入层、卷积层、池化层、全连接层以及输出层构成,其网络结构图如图1所示。

图1 传统卷积神经网络结构Fig.1 Structure of typical convolution neural network
卷积层和池化层主要用于输入数据的特征自学习。卷积层通常由多个卷积核构成,通过卷积核对输入的数据做卷积运算,自动提取特征。池化层是对卷积得到的特征做池化运算。主流的池化方式有最大池化和平均池化。经过卷积计算和池化计算,将结果输入到全连接层,最后由softmax回归层完成分类。
将一维信号转换为二维特征信息的维度转换会导致庞大的计算量,解决一维信号的分析识别问题,最好的方式是使用一维识别模型。因此,本文基于一维卷积神经网络构建故障诊断模型。本模型在传统卷积神经网络的基础上,将卷积核和池化核由二维改为一维,实现对一维振动信号的处理和识别,不再需对原始信号进行二维转换,显著减少了信号分析及计算工作量。一维卷积层计算公式如式(1)所示,最大池化层计算公式如式(2)所示。
(1)
(2)
1.2 混合域全特征集构建
现场采集到的离心泵振动信号中包含复杂的环境噪声,若直接将波形数据作为输入特征,神经网络内部难以实现时域到频域、时频域的转换,易造成部分故障特征无法被网络感知、噪声引起网络误感知等问题。同时,现场故障样本数据收集难度大,故障案例样本数量远小于无故障样本,因此在模型训练中需尽可能将故障样本的特征信息更全面地进行挖掘,进而在小样本状态下实现有效的模型训练。
针对上述问题,基于离心泵振动信号分析基础理论,本文构建混合域全特征集作为神经网络的原始输入特征,其包含元素分以下三类,共101维,如表1所示。

表1 混合域全特征集组成Tab.1 Composition of the full feature sets in mixed domains
时域及频域特征多为离心泵振动信号分析常用指标,对能量及熵特征的计算作如下说明:为了更好的反映故障引起的非平稳动态响应,本文使用小波包变换对信号进行时频分析。选择常用的正交小波基db3,进行3层小波包分解。并对分解后的分量求解小波包能量、能量矩。从衡量系统的混乱程度的角度上,引入熵的概念。计算近似熵、样本熵、排列熵等熵特征[15]。
1.3 基于补偿距离评估的输入特征降维优化
为实现小样本状态下有效的模型训练,构建混合域全特征集作为神经网络的原始输入特征。若将此特征集直接输入神经网络,即未考虑故障对特征的敏感性,将与故障相关、不相关特征均作为输入,必然导致如下两个问题:①神经网络内部特征维度高,模型实际应用时占用计算机资源较多;②特征计算及模型训练、检测所需时间长,难以满足应用中实时化要求。要实现神经网络模型在实际中的应用,快速计算分析是其中一个关键问题,需要在保证输入特征满足故障识别率要求的前提下尽可能降低输入特征维度。
针对上述问题,本文提出基于补偿距离评估的输入特征降维优化,充分考虑特征对故障分类识别的敏感性,筛选出故障敏感特征,其算法原理如下所述。
假设具有C个类w1,w2,w3,…,wc的特征集[16-17]
{pc,m,k,c=1,2,…,C;m=1,2,…,Mc;
k=1,2,…,K}
(3)
式中:pc,m,w为c状态下第m个样本第k个特征;Mc为c状态下样本总数;K为每个样本特征数目。在c类状态下,可得Mc个样本,因此总共可得Mc×C个样本集。从而得到Mc×C×K个特征,定义为{pc,m,k}。
(1)计算Mc×C类中所有特征向量
(4)
对dc,k(c=1,2,…,C)求平均后得平均类内距离
(5)

(6)
(3)计算C个模型类的类间距离
(7)


(8)
(5)定义并计算补偿因子
(9)
(10)
对αk归一化处理,得补偿距离评估指标为
(11)
2 离心泵故障快速智能识别方法
本文提出基于距离评估技术和卷积神经网络的离心泵故障智能识别模型,其实现流程如图2所示,主要包含如下4个步骤:
步骤1混合域全特征集构造。基于离心泵振动信号及其分析理论,构造三类101维混合域全特征集。其中包括16维时域特征、13维频域特征及小波包分解信号的72维能量及熵特征,具体组成如表1所示。此特征集可较全面地涵盖数据中的故障特征信息,通过此特征集进行故障识别模型训练可充分挖掘训练样本中的故障信息,进而提高单个训练样本的利用率,使故障识别降低对大样本的依赖,具备小样本深挖掘的能力。

步骤3故障识别模型建立。首先,以一维卷积神经网络建立故障识别模型,初始化网络参数。然后,使用训练样本降维后的特征集进行模型训练,以达到Loss曲线收敛为训练目标,不断优化网络参数,最终建立针对该离心泵的基于一维卷积神经网络的故障识别模型,将模型进行保存固化,上述模型可用于该泵n类故障(训练集中包含的故障类型)的分类识别。
步骤4测试样本故障识别。以待分析数据为原始输入,首先计算步骤2中确定的k维特征,然后将该特征集输入至步骤3中保存的故障识别模型,即可输出故障识别结论。故障识别模型在实时故障分析中应用时,只需进行本步计算,无需每次都重新进行特征降维优化与模型训练,保证了故障识别的快速实现。
步骤5模型升级与优化。若出现新的故障类型,即原来训练集未包含该类故障,则将新的故障数据加入训练集,再对步骤2的降维特征集和步骤3的故障识别模型进行升级与优化。

图2 离心泵故障快速智能识别方法流程图Fig.2 Flow chart of the fast and intelligent fault identification method for centrifugal pump
3 故障识别实例分析
选取两台离心泵现场案例,使用本文提出方法进行分析,以验证该方法在离心泵故障识别中的有效性。
3.1 离心泵1抽空故障
离心泵1为某石化炼油厂石脑油塔底泵,悬臂结构,转速为1 450 r/min,运行过程中发生了抽空故障。在线监测系统采集的振动信号为轴承座处振动加速度,数据信息如表2所示。每类训练样本数均小于20,为同类测试样本的20%以下,以模拟小样本训练条件。其中一组正常和故障样本时域波形如图3所示。

表2 离心泵1振动数据集Tab.2 Vibration data of pump 1
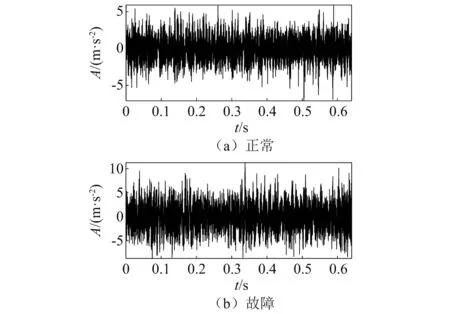
图3 离心泵1振动加速度时域波形Fig.3 Acceleration waveform of pump 1
3.1.1 混合域全特征集构造
将表2中训练样本提取三类101维混合域全特征集,并对其进行归一化处理。无故障和抽空故障特征如图4所示,对比可知部分特征在无故障和故障状态下区分度不高,即全特征集中存在部分冗余特征。
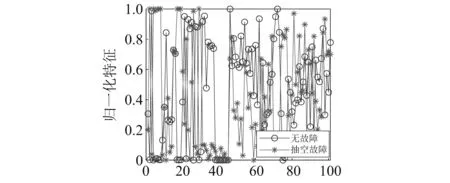
图4 离心泵1的全特征集对比Fig.4 Comparison of all features of pump 1
3.1.2 输入特征降维优化


表3 时域特征距离评估指标Tab.3 Indications of features in time domain
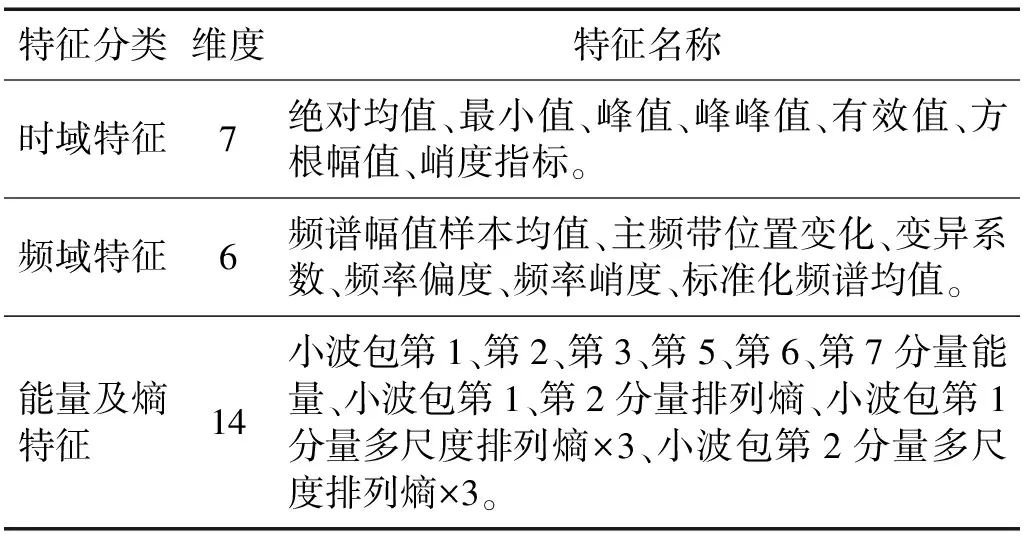
表4 离心泵1降维后特征集组成Tab.4 Features after dimension reduction of pump 1
有效特征在无故障和抽空故障状态下的对比,如图5(b)所示。由图可知降维后的有效特征能够较为理想地区分无故障和抽空故障状态。

图5 离心泵1特征降维Fig.5 Dimension reduction for features of pump 1
3.1.3 故障识别模型建立
设定离心泵1故障识别模型架构如下:两个卷积层,两个最大池化层和一个全连接层[19]。合理的配置卷积神经网络的层数、卷积核个数及大小,可以使神经网络获得丰富的感知视野以提取到更多的有效特征[20],同时可避免冗余计算。通过多次测试,定义初始模型具体参数如表5所示,模型架构如图6所示。

表5 模型参数表Tab.5 Parameters of the model
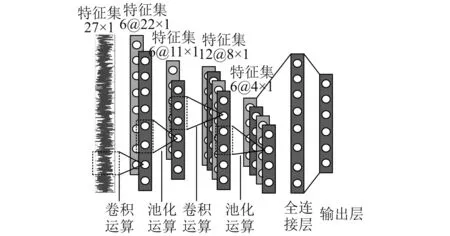
图6 一维卷积神经网络架构Fig.6 Structure of the 1D convolution neural network
如表2所述,将17组无故障样本和13组抽空故障样本作为训练集,按照表4计算其27维有效特征集。然后将上述特征输入前面定义的故障识别初始模型进行训练,模型的Loss函数曲线如图7所示。

图7 离心泵1故障识别模型训练Loss函数曲线Fig.7 Loss curve of the fault identification model of pump 1
由图7可知,通过上述训练集对识别模型进行训练后,步数为1 200左右时Loss函数值已收敛至0,即训练生成了有效的模型,保存该模型为离心泵1的故障识别模型。
3.1.4 测试样本故障识别
如表2所述,将130组无故障样本和80组抽空故障样本作为测试集,按照表4计算其27维有效特征集。然后将上述特征输入保存的故障识别模型,故障识别结果如表6所示。

表6 离心泵1故障识别结果Tab.6 Fault identification results of pump 1
由表6可知:①130组无故障测试样本识别准确率为100%,80组抽空故障测试样本识别准确率为96.3%,总准确率达到98.6%,识别准确率高,可用于离心泵故障的分类识别;②单组数据故障识别时间为2.41 s,计算速度快,可用于离心泵实时故障分析。
3.2 离心泵2滚动轴承损伤故障
离心泵2为某石化常减压装置底油泵,双支承结构,转速为2 980 r/min,运行过程中发生了滚动轴承内圈损伤故障。在线监测系统采集的振动信号为轴承座振动加速度,数据信息如表7所示,样本选择上继续模拟小样本条件。其中一组正常和故障样本时域波形如图8所示。

表7 离心泵2振动数据集Tab.7 Vibration data of pump 2

图8 离心泵2振动加速度时域波形Fig.8 Acceleration waveform of pump 2
3.2.1 混合域全特征集构造
同3.1.1节,计算训练样本的101维混合域全特征集,并作归一化处理。无故障和轴承损伤故障特征对比如图9所示,全特征集中亦存在大量冗余特征。

图9 离心泵2的全特征集对比Fig.9 Comparison of all features of pump 2
3.2.2 输入特征降维优化
同3.1.2节,对混合域全特征集进行降维优化,距离评估及有效特征对比,如图10所示。

图10 离心泵2特征降维Fig.10 Dimension reduction for features of pump 2
由图10可知,选取出的有效特征能够较为理想地区分无故障和轴承内圈损伤故障状态,特征维数由101降为13,降维后特征组成如表8所示。

表8 离心泵2降维后特征集组成Tab.8 Features after dimension reduction of pump 2
3.2.3 故障识别模型建立
离心泵2故障识别初始模型同离心泵1。如表7所示,将255组无故障样本和25组滚动轴承损伤故障样本作为训练集,按照表8计算其13维有效特征集。然后将上述特征输入前面定义的故障识别初始模型进行训练,模型的Loss函数曲线如图11所示。

图11 离心泵2故障识别模型训练Loss函数曲线Fig.11 Loss curve of the fault identification model of pump 2
由图11可知,通过上述训练集对识别模型进行训练后,步数为1 800左右时Loss函数值已收敛至接近于0,即训练生成了有效的模型,保存该模型为离心泵2的故障识别模型。
3.2.4 测试样本故障识别
如表7所示,将255组无故障样本和25组滚动轴承损伤故障样本作为测试集,按照表8计算其13维有效特征集。然后将上述特征输入保存的故障识别模型,故障识别结果如表9所示。

表9 离心泵2故障识别结果Tab.9 Fault identification results of pump 2
由表9可知:① 255组无故障测试样本识别准确率为98.8%,25组滚动轴承内圈故障测试样本识别准确率为100%,总准确率达到98.9%,识别准确率高,可用于离心泵故障的分类识别。②单组数据故障识别时间为2.29 s,计算速度快,可用于离心泵实时故障分析。
3.3 方法效果对比
为验证本文提出的故障识别方法在离心泵故障识别准确率和识别速度方面的优势,选取其他三种相似方法对上述两个案例数据进行分析。
方法1使用原始振动波形作为输入,以一维卷积神经网络建立故障识别模型[21]。将无故障和故障样本数据分为数据长度为1 024的时域波形作为输入,其中一组输入波形如图12所示。
方法2使用振动信号变换得到的时频图为输入,以传统卷积神经网络建立故障识别模型。将无故障和故障样本时域波形经过小波时频变换得到小波时频图,其中一组时频图如图13所示。
方法3对本文提出方法进行修改,去掉方法2的输入特征降维优化,即以混合域全特征集作为一维卷积神经网络的输入。

图12 方法1振动波形输入Fig.12 The input of method 1

图13 方法2时频图输入Fig.13 The input of method 2
在相同的计算条件下,训练样本与测试样本设置与3.1节及3.2节一致,模拟小样本测试条件,使用上述三种方法及本文方法分别进行分析,训练情况和识别结果如表10所示。

表10 4种模型性能对比Tab.10 Performance comparison of four models
由表10分析结果对比可知:
(1) 在小样本训练条件下,本文提出方法及其简化版(即方法3)可成功完成模型训练,即其具备小样本训练下建立模型的能力。而方法1和方法2出现了过拟合现象,即Loss函数曲线难以收敛至接近于0,如图14和图15所示,因此判断这两种方法不太适用于小样本训练条件。目前解决过拟合问题的有效方法为增加样本数量[22],但需要增加的故障样本数量往往较大,不太符合实际生产安全需求。
(2) 本文提出方法及其简化版(即方法3)的故障识别准确率均在98%以上,识别效果理想,其中全特征输入的识别率略高于降维特征输入。方法1和方法2由于过拟合现象的出现,导致建立的模型故障识别效果较差,为50%~65%。
(3) 本文提出方法及方法1、方法2在单组数据故障识别时间及模型训练总时间方面存在明显优势,其中单组数据识别时间均在3 s左右及以下,故障识别速度快,可满足实时故障识别的需求。而方法3由于每组数据均需构造101维全特征集,导致其单组数据识别时间为14 s以上,为本文提出方法的6倍以上,难以满足实时故障识别的要求。上述分析结果证明本文提出的基于补偿距离评估的特征降维优化方法可去除全特征集中的冗余信息,保留故障敏感特征,从而显著减少特征构造与故障识别时间。
因此,对比上述四种方法,本文提出方法在小样本条件下模型训练效果、故障识别准确率、识别时间及训练时间4个方面均具有明显优势,可用于工程中离心泵故障的快速智能识别。
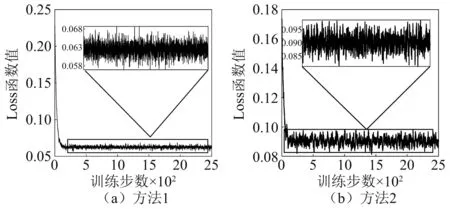
图14 离心泵1故障识别模型训练的Loss函数曲线Fig.14 Loss function curve of the fault identification model for pump 1

图15 离心泵2故障识别模型训练的Loss函数曲线Fig.15 Loss function curve of the fault identification model for pump 2
4 结 论
(1) 本文提出的基于补偿距离评估和一维卷积神经网络的故障快速智能识别方法能十分有效地实现离心泵故障的识别,故障识别准确率高且识别速度快,可满足工程应用需求。
(2) 通过混合域全特征集的构造,可充分挖掘训练样本中的故障信息,提高单个样本的利用率,进而使模型具备小样本训练的能力。
(3) 通过补偿距离评估方法对全特征集进行降维优化,可在保留故障相关信息的同时显著降低特征维度,进而大幅降低特征构造、故障识别与模型训练所需时间,使模型具备快速故障识别的能力。
(4) 使用已有案例数据训练由上述方法建立的故障识别模型,模型内部可自动生成对应故障的识别方法,进而用于后期监测数据的智能分析与故障智能诊断。
