永磁同步电机的自抗扰控制器参数自整定
2021-06-02冉
冉
(1.中国科学院光电技术研究所,成都 610209;2.中国科学院大学,北京 100049;3.中国科学院空间光电精密测量技术重点实验室, 成都 610209)
0 引言
永磁同步电机凭借结构简单,体积小、效率高等优点被广泛的应用于工业控制领域。但是由于在实际工况中存在多种扰动因素,永磁同步电机常用的PID控制器因存在适应性差、抗扰能力差等缺点不能满足某些工况下的要求。而自抗扰控制器具有抗扰能力强、精度高等优点,极大地提高了永磁同步电机的控制性能。所以,自抗扰控制技术成为永磁同步电机控制策略的研究热点。
自抗扰控制技术是韩京清提出的一种控制方法[1],它的思想是将控制系统中所有干扰和不确定性都打包为一个扩张状态,进行一个统一的估计并对其及时补偿,从而使控制系统达到更好的控制效果[2]。而经典的自抗扰控制器参数众多,整定困难。2003年,高志强教授提出了带宽整定法[3],将线性自抗扰控制器的参数减小为3个,降低了调参的难度。
目前对自抗扰控制参数进行自整定的方法主要是结合智能算法对自抗扰控制器进行整定[4]。如遗传算法[5]、蚁群算法[6]、鲸鱼优化算法[7]、鸟群算法[8]、蜂群算法[9],粒子群算法[10]等。但这些方法均有复杂度大、收敛速度慢、容易陷入局部最优等缺点,使用这些方法对自抗扰控制器优化的参数可能是局部最优解,不能有效的提高控制系统的控制性能。所以针对这些问题,本文使用复杂度较小的粒子群算法对线性自抗扰控制器的参数进行优化,并对粒子群算法进行了改进。针对粒子群算法收敛速度慢和容易陷入局部最优缺点,首先提出了一种线性自适应惯性权重的改进方法,兼顾粒子群的全局搜索能力和局部搜索能力。其次,在粒子群陷入局部最优时,对粒子群进行柯西变异,使粒子群跳出局部最优。最后使用改进粒子群算法对永磁同步电机PMSM(Permanent magnet synchronous motor)位置环所使用的自抗扰控制器进行参数整定的仿真验证。
1 PMSM的线性ADRC参数优化原理
线性自抗扰控制器的结构如图1所示,它主要由三部分组成,分别为跟踪微分器(TD)、线性扩张状态观测器(LESO)、线性反馈控制律(LF)。其中v是系统的输入,z1、z2、z3是LESO的输出,u是LADRC的输出,y是控制系统的输出。
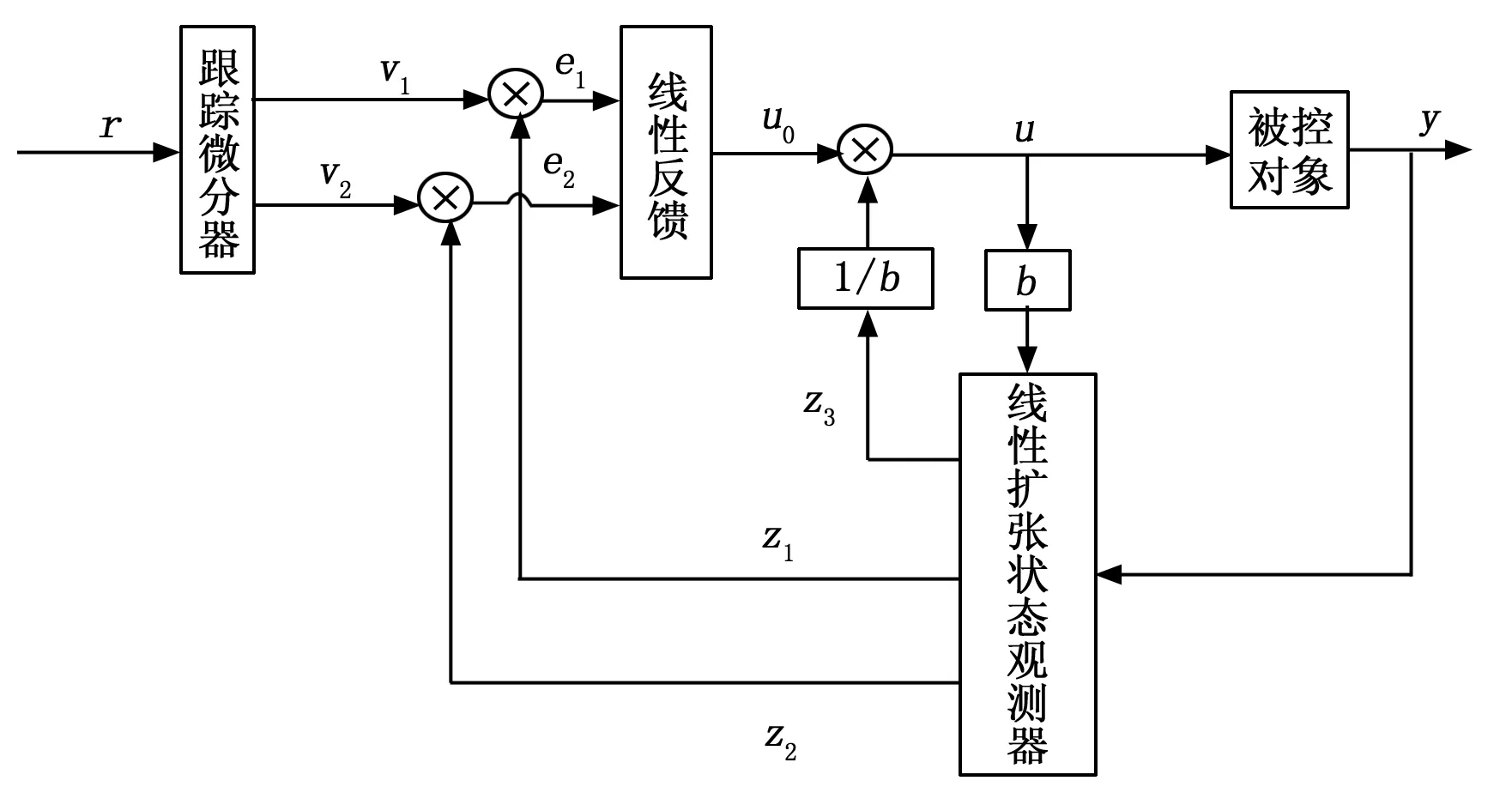
图1 线性自抗扰控制器
跟踪微分器的方程为:

(1)
线性扩张状态观测器的方程为:
(2)
线性反馈控制律的方程为:

(3)

2 粒子群算法
粒子群算法是一种进化算法,1995年由Kennedy 和 Eberhart共同提出,其基本思想是将粒子看作搜索空间里没有质量和体积的个体,粒子群中的每个个体代表一个问题的解,每个粒子都有速度和位置两个特征,每个粒子通过适应度来评价粒子的优劣并通过跟踪自身的个体最优解和全局最优解进行自我位置更新。粒子更新公式如下:
(4)
(5)

(6)
其中:wmax、wmin分别为w的最大最小值;iter和itermax为当前迭代次数和最大迭代次数,标准粒子群算法按照上述公式不断更新粒子位置,当其达到迭代条件时,所输出的gbest就是当前最优解。在使用标准粒子群算法(粒子数N=10,维度D=50,迭代次数iter=1 000)对表1中的测试函数f1、f2、f3、f4进行寻优时(其中f1、f2为单峰函数,f3、f4为多峰函数),在理论最优值为0时,从表2可看出4种测试函数PSO算法寻优精度分别为103、103、102、101,可以看出标准粒子群算法PSO(Particle swarm optimization algorithm)的寻优精度跟理论值最优值有很大的差距,说明标准粒子群算法容易发生早熟现象,即粒子群算法没有找到全局最优解就已经停止迭代。为改善早熟现象,提高粒子群算法的寻优精度,本文提出了自适应变异粒子群算法(APSO)对早熟现象进行改善。

表1 实验中所用的4个测试函数
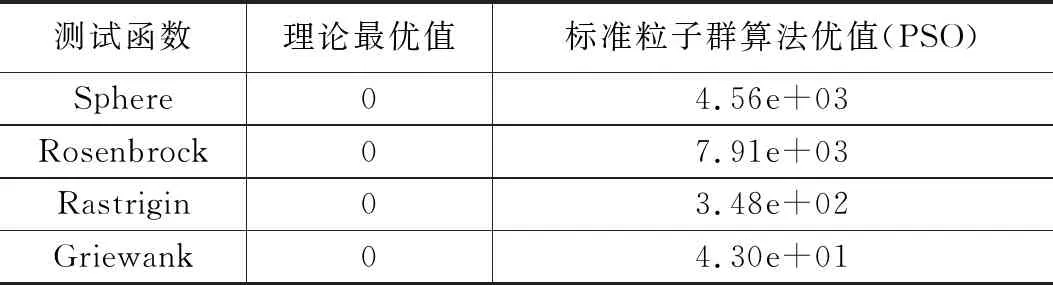
表2 标准粒子群算法寻优值对比
3 自适应变异粒子群算法(APSO)
由惯性因子可以平衡粒子的全局和局部的搜索能力[13],较大的惯性因子有利于粒子的全局搜索,而较小的惯性因子有利于粒子的局部搜索,为兼顾粒子群的全局搜索能力和局部搜索能力,可把粒子群分为适应度好的粒子和适应度不好的粒子,对适应度好的粒子继续增强局部搜索能力,期望找到更优解,而对适应度不好的粒子增强其全局搜索能力,从而避免粒子陷入局部最优。基于此思想,设计线性自适应惯性因子调整方法。计算公式如下:
(7)
(8)


(9)
式中,N为粒子群的数量。σ2可判断种群聚集度[14],当σ2越小,种群越聚集,个体之间的距离越小。当σ2小于某阈值或者全局最优解(gbest)连续φ次无改变,可认为粒子群的多样性降低,则说明粒子群已陷入局部最优。为增加粒子群的多样性,对粒子群进行变异,使粒子跳出局部最优。其中φ的理想取值为:
(10)
在进行粒子群变异时,由于柯西算子具有更强的两翼性,可使粒子以更高的概率跳到更远的位置,尽可能大的增加了粒子群的多样性,从而增大粒子群跳出局部最优的可能性。粒子群柯西变异公式如下:
(11)
其中:当xi,j>xmax时,令xi,j=xmax,当xi,j 为了验证本文算法的有效性,选取4个典型的标准函数(如表1所示)将标准粒子群算法和改进粒子群算法进行对比。 实验在50维空间进行,选取粒子群数目N=10,最大迭代次数为1 000,每个测试函数分别运行30次,计算全局最优值的平均值Favg和全局最优值的方差Fstd进行实验对比。对于改进粒子群算法(APSO)在进行参数设置时,惯性因子wmax=0.5,wmin=0.2,学习因子c1=c2=2。对于标准粒子群算法(PSO-I)在进行参数设置时,为保持实验条件的一致性,所有参数设置均与APSO算法的参数一致。对于标准粒子群(PSO-II)在进行参数设置值选择标准粒子群算法的典型取值[15],即惯性因子wmax=0.9,wmin=0.4,学习因子c1=c2=2。算法测试结果如表3。 表3 测试函数寻优结果对比 由表3可知,改进粒子群算法APSO(Adaptive particle swarm optimization algorithm)在对不同类型的测试函数进行测试时,能得到比标准粒子群算法更优的结果。其中对于测试函数f1,APSO寻优结果比PSO-I和PSO-II均提高了140多个数量级,对于测试函数f2,APSO寻优结果比PSO-I和PSO- II均提高了140多个数量级,对于测试函数f2,APSO寻优结果比PSO-I和PSO-II提高了2~3个数量级,对于测试函数f3、f4,APSO算法均找到了全局最优值。由此可以看出,APSO算法对比PSO算法优势明显,改善了PSO的早熟现象,提高了算法的收敛精度。为进一步验证APSO的有效性,f1、f2、f3、f4在3种算法下的寻优过程如图2所示。在对于f1、f2、f3、f4函数寻优过程中,PSO-I在均迭代前50次就停止迭代从而陷入局部最优,对比PSO-II和APSO算法,在对f1标准测试函数的进行寻优时,APSO算法的收敛速度比PSO-II提高了1.2倍。在对f2标准测试函数的进行寻优时,APSO算法的收敛速度比PSO-II提高了2倍。在对f3标准测试函数的进行寻优时,PSO-II算法虽在迭代次数为140次时进行收敛,但此时APSO算法找到了更优值。在对f4标准测试函数的进行寻优时,APSO算法的收敛速度跟PSO-II基本一致,但是APSO在迭代过程中寻找到了全局最优值。所以,从图2可以看出APSO算法能够在保证收敛精度的同时,加快收敛速度,即平衡了算法的收敛速度和收敛精度。 图2 不同测试函数的寻优过程 使用Simulink搭建永磁同步电机(PMSM)仿真模型,使用标准粒子群算法(PSO)、自适应变异粒子群算法(APSO)对PMSM位置环的LADRC控制器参数进行自整定,如图4所示。对比不同算法所得参数对控制系统控制效果。本文采用的性能指标函数为ITAE,迭代次数为50次,其余参数与基于标准测试函数测试时参数相同。其中ITAE的数学表达式为: 图3 阶跃响应曲线 图4 永磁同步电机位置环参数整定原理图 (11) 4.2.1 控制性能对比 在对比超调量时,给定信号为阶跃信号,图3为PSO算法和APSO算法所整定参数的阶跃响应,其中PSO算法所整定参数的超调量5%,而APSO算法所整定参数的超调量为2.5%,APSO算法所整定的参数的超调量比PSO算法所整定参数的超调量降低了50%,因此可看出,APSO算法得到的参数使控制系统的超调量更小。 在对比跟踪精度时,给定信号为正弦信号,图5为分别由PSO算法和APSO算法所整定参数的跟随曲线,图6为两种算法所整定参数的跟踪误差,从图中可以看出APSO算法的跟踪误差比标准PSO算法降低了4.89%。所以可以看出APSO算法所得参数能使控制系统的跟踪精度更高。 图5 跟踪曲线 图6 跟踪误差 为了对比位置环的抗干扰能力,使电机空载启动,在0.15 s时突加额定负载,图7为两种算法位置控制曲线、图8为突加负载时的跟踪误差及局部放大图,从图中可以看出APSO算法在突加负载时位置的跌落幅度小于PSO算法,因此,可以看出基于APSO算法的位置控制系统的抗干扰能力更强。 图7 突加负载跟踪曲线 图8 突加负载跟踪误差 4.2.2 收敛速度、收敛精度对比 图9为PSO算法和APSO算法对LADRC参数的优化曲线,从图中可知,算法初期两种算法的收敛速度都很快,但PSO算法很快陷入局部最优,而APSO在较短的迭代次数内就搜索到了最优解范围,且在迭代次数为13次时,成功跳出局部最优值,找到了更优值。所以APSO算法对控制参数的优化效果不论是在收敛速度上还是收敛精度上均优于PSO算法。 图9 参数优化曲线 本文采用粒子群算法对线性自抗扰控制器的参数进行了整定,并针对粒子群算法收敛速度慢和容易陷入局部最优的缺点引入了线性自适应惯性因子的改进方法,并在粒子群算法陷入局部最优时,对粒子群算法进行柯西变异使粒子群算法跳出局部最优。最后分别通过测试函数和控制系统对算法进行仿真验证。在对4个标准测试函数进行测试时,对于测试函数APSO比PSO的平均收敛精度高出73个数量级。对于测试函数 ,APSO均找到了理论最优值。在对控制系统进行仿真验证时,在超调量对比上,APSO算法所整定的参数的超调量比PSO算法所整定参数的超调量降低了50%;在跟踪精度对比上,APSO算法的跟踪误差比标准PSO算法降低了4.89%;在收敛速度上,APSO算法的收敛速度比标准PSO算法提高了50%。所以,自适应变异粒子群算法有更快的收敛速度和更高的收敛精度,提高了控制系统的跟踪精度和抗干扰能力,减小了控制系统的超调量。因此,本文提出的自适应变异粒子群算法可以用于线性自抗扰控制器的参数自整定。4 粒子群算法性能测试
4.1 基于标准测试函数的寻优测试


4.2 基于PMSM的LADRC参数优化测试








5 结束语
