基于矢量传感器的无人驾驶车辆信号远程监测系统
2021-06-02
(1.中北大学 仪器与电子学院,太原 030051; 2.中北大学 电气与控制工程,太原 030051)
0 引言
随着机车制造技术、互联网大数据计算技术、云计算技术、AI控制技术的多种技术的快速发展与联合应用,推动了无人驾驶技术的高速发展。通过对无人驾驶车辆的输出稳定性控制设计,提高无人驾驶车的自动驾驶能力,确保车辆在行驶过程中的安全性,研究无人驾驶车辆信号远程监测系统在智能化车辆控制设计中具有重要意义。基于多数据综合分析技术与驾驶控制技术于一体的无人驾驶技术,是汽车制造与设计领域上的一次革命,无人驾驶技术将从理念与结构方式上改变人们的生活[1]。
在无人驾驶车辆控制中,车辆状态数据的实时性、稳定性、准确性直接决定着车辆控制指令的正确与否。因此,车辆状态的实时监测是发现车辆异常的有效方法。基于上述思想,在无人车辆诸多操作系统中,车辆信号监测系统的监测效果直接决定着其他控制系统能够正常运行以及能够做出正确的指令操作[2-3]。考虑到无人驾驶车辆的是动态数据点,因此信号的远程监测清晰度决定着监测系统对车辆的监测效果。结合过去无人驾驶车辆的远程监测数据发现,50~100 km范围内是无人驾驶车常用环境下的信号远程监测最大范围。在此范围内,现有的无人驾驶车辆信号监测系统都会出现不同程度的信号衰减带来的清晰度降低问题,从而导致监测数据稳定性降低[4]。究其根源在于监测系统信号处理全局变量的模量化,模量信号的不同对称是问题产生根源,而矢量数据能够很好地解决模量带来的问题,因此提出基于矢量传感器的无人驾驶车辆信号远程监测系统。
1 基于矢量传感器的系统总体框架设计
基于矢量传感器的无人驾驶车辆信号远程监测系统总框架有两部分构成,分别为监测硬件与监测软件,框架结构设计原理,如图1所示。
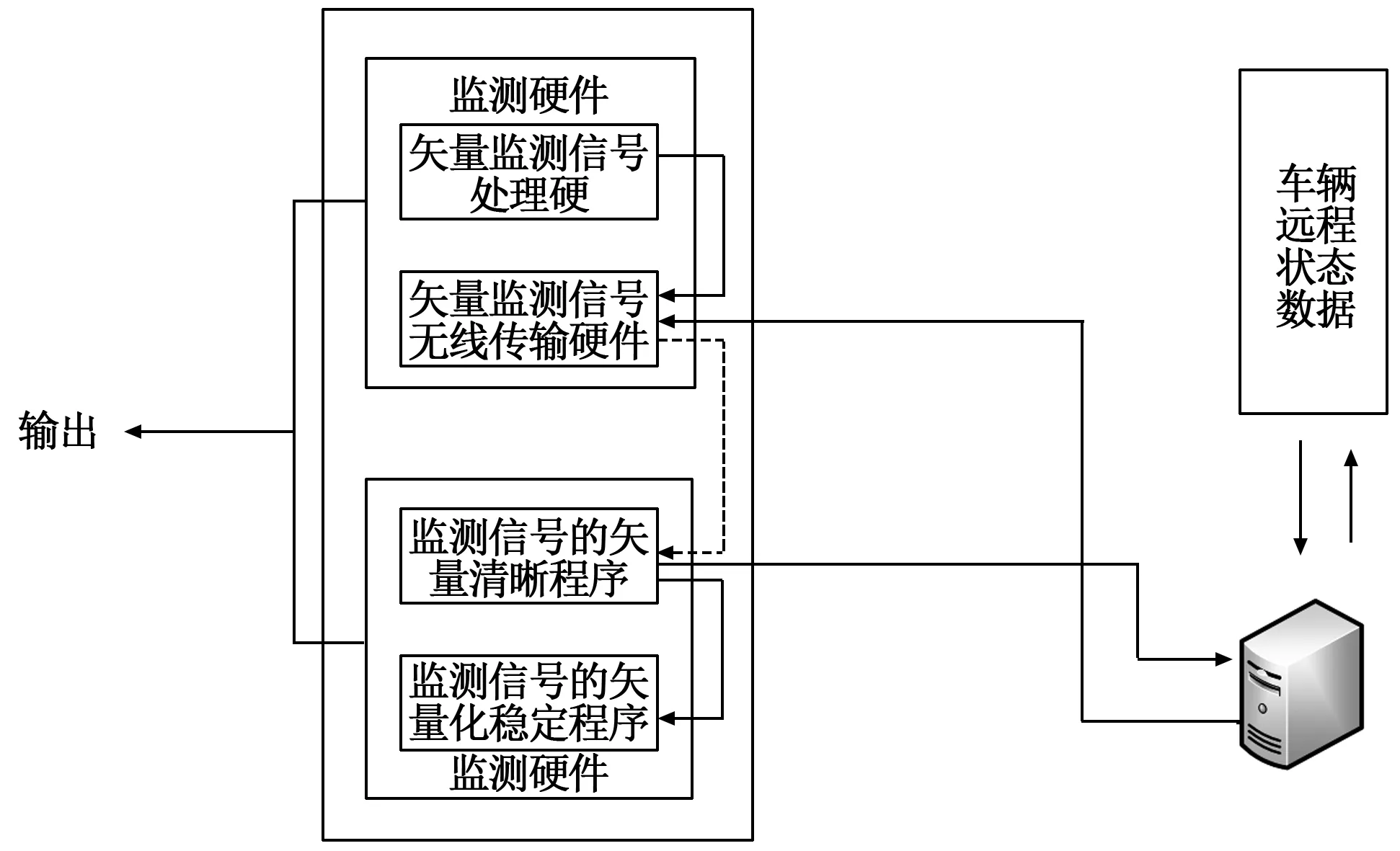
图1 框架结构设计原理示意图
检测硬件:基于矢量传感器以及相关器件,构建一套以矢量信号数据为核心信号源的信号收发、解析、处理平台。矢量传感器利用检测的定量电压、电流等容易检测到的物理量信号进行信号的远程监测。重要的方面是如何准确地获取信号转速的信息,且保持较高的监测精度,满足实时监测的要求。矢量传感器无需监测硬件,免去了操作麻烦,提高了监测系统的可靠性,降低了监测系统的成本;另一方面,使得监测系统的体积小、重量轻,而且减少了电机与控制器的连线,使得采用矢量传感器的异步电机的调速系统在无人驾驶车辆信号远程监测中的应用更加广泛。利用矢量数据的一致性,通过硬件计算能力对模量数据进行矢量化转换,为后续软件程序的运行搭建处理平台。通过不同矢量传感器之间的数据交换,实现监测信号的连续性与稳定性,为软件程序对信号的控制拟合,提供算力支持。
监测软件:软件部分主要基于矢量传感器设计硬件功能,通过矢量监测相关算法,对硬件功能的驱动程序进行设计。通过设计程序,使硬件矢量计算功能与数据之间更好的融合,同时通过设计程序使设计硬件的远程监测效果达到系统设计的预期效果。
2 基于矢量传感器的无人驾驶车辆监控信号交互硬件单元设计
2.1 矢量监测信号处理硬件设计
提出系统硬件部分设计根据总框架结构完成,矢量监测信号处理硬件部分设计,主要负责对监测信号的实时高效处理,在矢量环境下对监测信号的模量、变量进行矢量化转换、分析。滤除矢量环境下模量信号噪声提升,增强信号解析能力,保证数据分析、传输、转换效率。
矢量监测信号处理硬件设计包括:多数据矢量传感器R532、PL542J12矢量信号处理MCU、RS544总线、信号转换接口485以及SIT4176R矢量信号传感器以及信号传输电路构成。硬件设计结构如图2所示。
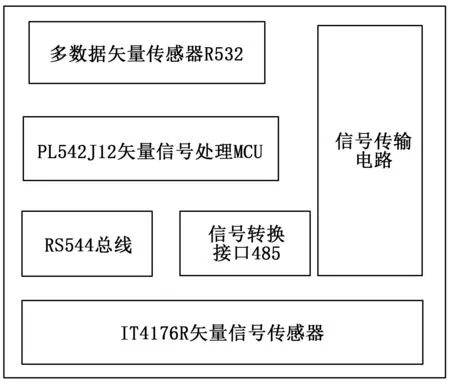
图2 矢量监测信号处理硬件结构
其工作原理是由多数据矢量传感器R532将远端监测信号进行接收,并将其转发至PL542J12矢量信号处理MCU,经过矢量转换处理,经RS544总线指令控制,将处理后的矢量信号由信号转换接口485推送至SIT4176R矢量信号传输芯片经信号传输电路输出。
矢量监测信号处理硬件功能实现过程原理如图3所示。

图3 矢量监测信号处理硬件功能实现过程原理
2.2 矢量监测信号无线传输硬件设计
矢量监测信号无线传输硬件主要通过采用矢量无线信号传输处理器ZP87KS33E、北斗定位信号传感器与无线信号传输控制电路构成具有矢量信号远程大功率传输功能模组。
ZP87KS33E矢量无线信号传输处理器具有矢量数据多模拟合分析速度快的特点,辅助北斗定位信号传感器对远程车辆位置数据的实时更新解析,由无线信号传输控制电路对多组信号交互拟合提供高功率、全区域覆盖支持。无线信号传输控制电路设计如图4所示。
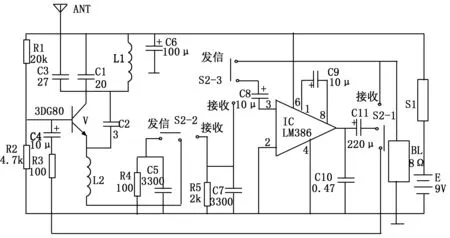
图4 无线信号传输控制电路
3 基于矢量传感器的硬件平台软件适配
3.1 监测信号的矢量清晰程序设计
在基于矢量传感器硬件的软件适配设计中,根据远程监测系统功能性,软件功能设计首先对监测信号的清晰度处理进行设计。设计原理主要基于矢量传感器硬件处理机制与信号滤波相关算法,对模量信号源包含的噪声进行矢量转换,从而滤除模量噪声,提升信号清晰度。程序功能实现的具体过程如下:
将矢量传感器构成硬件获得的数据转换为矢量空间坐标数据,根据坐标数据创建矢量共维坐标系。在坐标空间中,定义矢量信号传感器坐标位置与模量信号载入坐标位置,如图5所示。其中,矢量信号传感器坐标点与坐标空间的原点重合,将模量信号的矢量空间载入通道的正方向数量设定为3,分别沿着x,y,z正轴向分布,ϑ1∈(-π,π]代表矢量转换后的信号传播水平角度值,γ1∈(-π/2,π/2]代表量转换后的信号传播俯仰角。
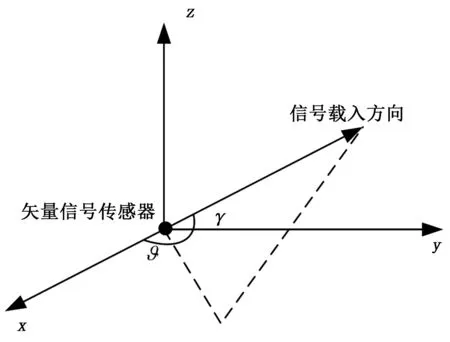
图5 矢量监测信号的传感器载入方向示意图
当矢量转换过程中存在任何一路信号模量不统一情况时,程序设计函数会自行根据当下模型转换的矢量环境,定义4×1的矢量转换信号误差向量为m,从而统一各路模量转换系数,其中4代表模量信号的声压噪声通道、x,y,z方向载入通道相位响应与声压噪声通道相位响应之间的矢量转换误差量;因此m的所对应的矢量系数为0[5]。定义此状态下矢量信号转换对角矩阵Γ所包含的模量数据因子为exp(km),其中,k代表矢量噪声滤波范围。
矢量转换后的信号输出向量[6],可描述为:
t(l)=[q(l),bx(l),by(l),bz(l)]Y=
o(ϑ1,γ1)d(l)+i(l)
(1)
式中,q(l)代表声压通噪声道输出信号,bx(l),by(l),bz(l),分别是信号传播3个正向通道输出源数据;d(l)代表模量信号载入时对应的波形向量;i(l)=[q(l),bx(l),by(l),bz(l)]Y代表声压噪声与正方向3通道的矢量转换噪声;o(ϑ1,γ1)代表载入模量信号的导向向量,其程序对应算法函数形态为:
o(ϑ1,γ1)=[1,cos(ϑ1)cos(γ1),sin(ϑ1)cos(γ1),sin(γ1)]Y
(2)
输出矢量信号的噪声协方差矩阵为:

(3)

(4)


(5)
根据式(3),可得信号清晰处理后的输出信号为:
(6)

监测信号的矢量清晰程序功能实现流程如图6所示。
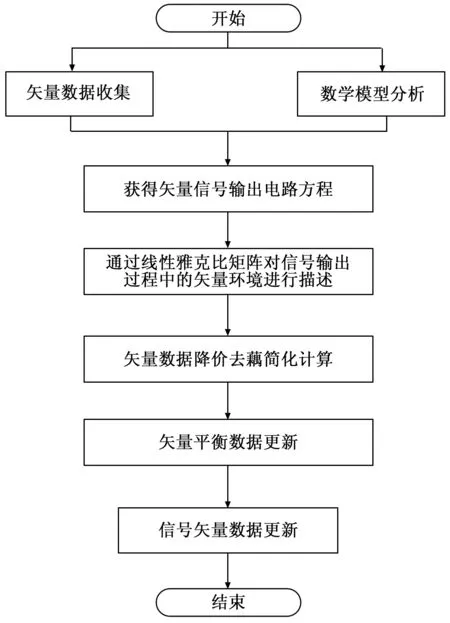
图6 监测信号的矢量清晰程序功能实现流程
3.2 监测信号的矢量化稳定程序设计
完成监测信号的矢量处理后,监测信号的清晰度得到了大幅度提升,在矢量信号的基础上,为保证信号传输的稳定性,设计系统软件部分设计了矢量化稳定程序对其信号进行稳定处理[8-9]。监测信号的矢量化稳定程序设计功能实现主要基于矢量传感器收集收据,结合卡尔曼滤波空间的BLDCM模型,对传感器信号输出状态进行转移平衡控制,达到稳定信号传输效果[10]。程序功能实现具体步骤如下所述。
根据矢量传感器收集数据与矢量状态进行数学建模分析,结合β-χ两相静止坐标系上的矢量信号输出电路方程可写为:
(7)
式中,Ad=Af=Aw,d代表信号矢量状态算子。定义状态分量r为:
(8)
根据矢量信号传输状态随时间的变化特征[11],这个基本的EKF模型在实际应用中是随时间变化的,可通过线性雅克比矩阵对信号输出过程中的矢量环境进行方程描述[12]:
(9)
为了简化程序计算流程,对矢量电路环境中的信号电流系数量nβ、nχ进行去耦降价,获得雅可比矩阵,矢量信号输出矩阵与矢量信号状态转移矩阵如下:
(10)
(11)

(12)
(13)
对信号输出矢量数据进行更新,更新步骤如下:
对Wf、Tf、Q0、i进行初始化操作;采集矢量信号输出电路ns、nm、oβ、oχ的数据值;对矢量电路信号电流值nβ(i)、nχ(i)与信号状态动势rβ(i)、rχ(i)进行数据导出替换。
4 实验结果分析
对基于矢量传感器的无人驾驶车辆信号远程监测系统的监测信号效果进行对比实验。本文设计的基于矢量传感器的无人驾驶车辆信号远程监测系统作为系统1,基于基站技术的车辆监测系统作为系统2,基于GPS追踪的车辆监测系统作为系统3进行实验验证。
4.1 实验配置
实验采用系统2和系统3作为对比系统,分别对设计系统50~100 km为半径范围内的信号强度与信号连续性进行对比测试。具体测试步骤如下:
1)将本文设计系统1与两种对比系统2和系统3接入测试环境,并统一向参测系统发送测试车辆位置移动数据(车辆位置数据为50~100 km为半径范围内的移动状态数据);
2)以30秒为一个数据结算单位,连续记录参测系统10个单位结算数据;
3)对结算数据中本文设计系统1与系统2、系统3的信号强度;
4)根据对比结果得出强度测试结果。
按照上述测试方式,利用相同测试数据与环境,完成3种系统的连续性测试,并得出结论。
4.2 远程监测信号强度对比实验
对本文设计系统1与两种对比系统2、系统3的远程监测信号强度进行对比实验,其中信号强度dBm的值越大越好,信号强度对比实验结果如表1所示。
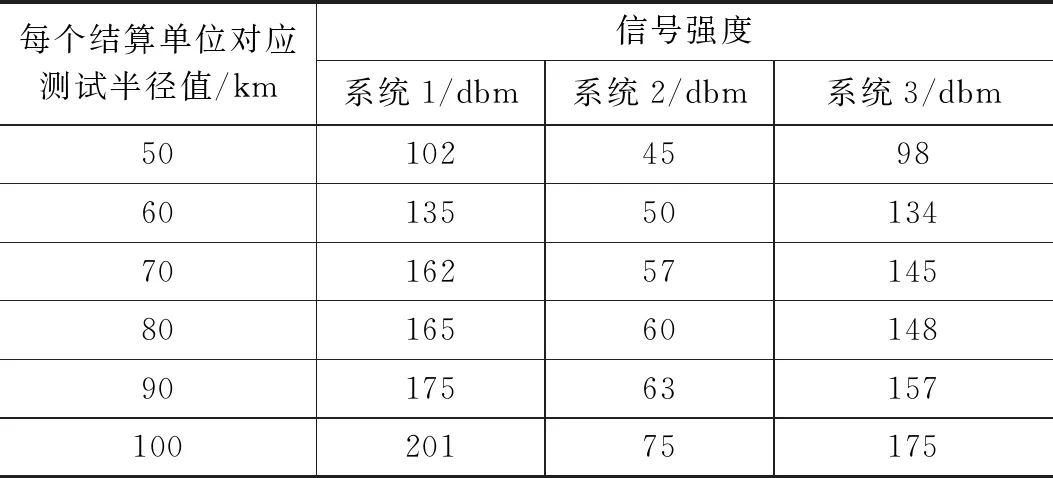
表1 不同系统的远程监测信号强度对比实验结果
通过对比表1实验结果发现,系统1(基于矢量传感器的无人驾驶车辆信号远程监测系统)在测试距离范围内的信号强度明显优于系统2(基于基站技术的车辆监测系统)和系统3(基于GPS追踪的车辆监测系统)的信号强度,且根据信号强度值波动范围来看,本文所设计的基于矢量传感器的无人驾驶车辆信号远程监测系统的信号强度稳定性较好;其原因是所设计的系统1根据矢量信号的电路电流与矢量电压状态分量,获得监测信号输出过程中的信号矢量角与稳定概率,一定程度上有利于提高远程监测信号强度。
4.3 远程监测信号连续性对比
对本文设计系统1与两种对比系统2、系统3的远程监测信号连续性进行对比实验,其中信号丢包率越小越好,实验结果如表2所示。
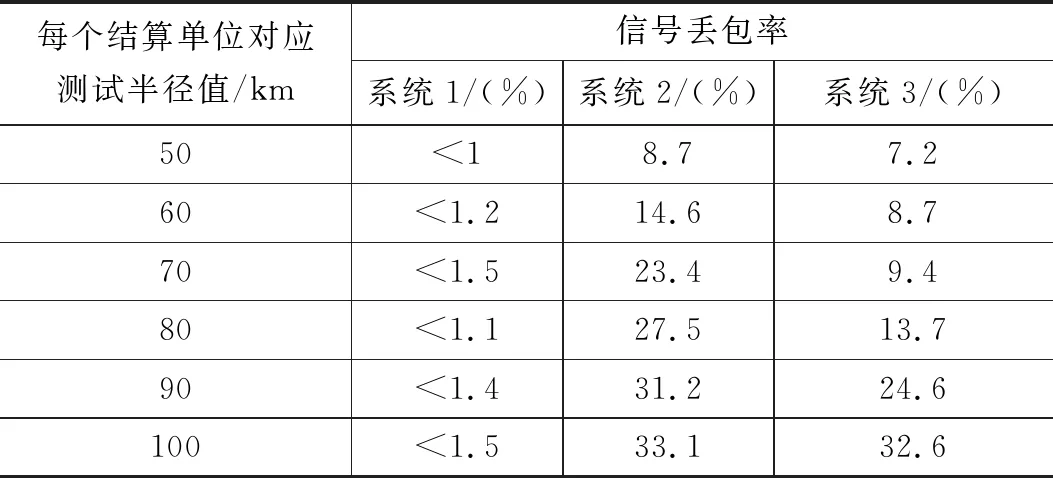
表2 不同系统的远程监测信号连续性对比实验结果
通过对比表2实验结果发现,系统1在50~100 km测试范围内的信号丢包率,能够稳定控制在1.5%以下,相对比系统2和系统3的信号丢包率效果优越性明显,通过信号丢包率能够侧面反映出系统1的信号连续性。其原因是所设计的系统1完成监测信号的矢量处理后,大幅度提升了监测信号的清晰度,在矢量信号的基础上,保证了信号传输的稳定性,更有利于降低信号丢包率。
综上所述,结合对不同系统的信号强度与连续性对比实验数据综合分析,可以证明提出的基于矢量传感器的无人驾驶车辆信号远程监测系统具有提升监测信号清晰度,优化监测信号实时性与连续行的效果,起到了改进传统系统,解决信号质量问题的作用。
5 结束语
文章对传统无人驾驶车辆信号监测系统,存在的远程信号清晰度随距离基量增加信号衰减,导致的监测信号清晰度降低问题,提出了基于矢量传感器的无人驾驶车辆信号远程监测系统。利用矢量数据的统一性,结合矢量传感器应用技术与矢量传感器相关算法,对提出系统的软件与硬件进行了相关设计。通过与两种不同监测系统的信号强度与连续性数据对比,证明了设计系统的可应用性与应用推广价值。设计系统的提出,为无人驾驶车辆的研发与控制技术的完善,提供了更多基础实践数据与解决方案。但是本文研究仅在实验环境中进行了测试,实际无人驾驶车辆信号监测环境更为复杂,因此该系统有待进一步研究和分析。对于未来的研究,可就减少事故发生率,对信号监测系统辅助无人驾驶车辆行驶进行研究,提高无人驾驶车辆安全性能。
