湿润性对孔隙介质两相渗流驱替效率的影响1)
2021-05-30魏鹳举陈益峰
魏鹳举 胡 冉 廖 震 陈益峰
(武汉大学水资源与水电工程科学国家重点实验室,武汉 430072)
(武汉大学水工岩石力学教育部重点实验室,武汉 430072)
引言
岩石、土壤及沉积物等地质材料中的多相渗流广泛存在于诸多自然与工业过程中,例如,降雨入渗[1-2]与包气带水−气迁移[3-4]、非水相污染物地下水修复[5-6]、油气强化开采[7-10]、深部咸水层二氧化碳地质封存[11-12]、核废料地质封存等[13].由于不同流体之间存在界面张力且互不混溶,多相渗流呈现出复杂的驱替模式或流动结构[14-15].这些不同的驱替模式,与介质固有特性(如湿润性[16-17]、结构非均质性[18-21]、粗糙度[22])、流动条件(注入流速[23]、重力效应[24]) 和流体性质(流体黏滞系数[25]、界面张力[26]) 密切相关,对多相渗流过程的驱替效率[27-28]和宏观渗流特性[29]起决定性影响.
孔隙介质壁面湿润性是影响多相渗流驱替模式的一个重要因素.在长期的地质环境演变过程中,深部岩体受到诸多物理和化学作用,例如岩石孔隙壁面吸附有机物或二氧化碳等其他活性气体,导致岩石孔隙壁面湿润程度发生显著改变[30-31].湿润性的变化改变了流−流−固三相的接触特性,进而显著影响多相渗流的驱替模式和驱替效率.在深部资源高效开采的工程实践中,国内外学者对湿润性如何影响多相渗流驱替模式及效率,开展了广泛而深入的研究.然而,由于湿润性效应的复杂性和多尺度特性,一些研究人员认为,当入侵流体与壁面的湿润性增加时,驱替界面会变得更加稳定,从而增加驱替效率[32-36].Cieplak 等[32-33]提出了3 种经典的弯液面运动模式:Burst,Touch 和Overlap,他们发现当入侵相变得更加湿润时,驱替模式变得稳定,驱替效率增加.Holtzman等[34]建立了一种考虑流体动态效应和湿润性影响的细观机理模型.该模型同样表明,随着湿润性的增加,孔隙间的协同填充作用得到促进,从而使驱替锋面变得稳定.Jung 等[35]和Singh 等[36]的研究也表明:当入侵相与介质的湿润程度增加时,驱替效率会随之增大.
另一方面,一些研究结果表明,当入侵相流体与介质壁面的湿润性增加时,驱替界面反而变得不稳定,从而导致更小的驱替效率[37-39].Zhao 等[37]通过圆盘微观模型实验、Chaudhary 等[38]通过CT 岩芯驱替实验、Spiteri 等[39]通过数值模拟实验证实了这一观点.这些研究表明,较小的入侵相接触角能够促进“折断”和“绕流”现象的发生,入侵相会优先入侵直径较小的孔隙,从而避开直径较大的孔隙,捕获大量的被驱替相流体.被驱替相一旦被捕获后,很难再被驱替,因而驱替效率显著减小.
在实验方面,微流体技术是目前具有潜力的多相渗流可视化观测技术之一[40].虽然微流体实验无法还原自然界中真实的流动过程,但是在某种程度上能够对流动现象进行规律性地分析解释[41].与传统的CT 岩芯扫描技术或玻璃珠驱替实验相比,微流体技术主要有以下优势:(1) 制作工艺简单:实验人员通常只需要购置基本原材料和常用设备便能加工得到所需的微流体芯片,能够实现对微流体芯片的低成本快速装配[42];(2)可视化效果好:通过CCD 相机或光学显微镜便可实现对整个流动过程的实时动态观测,图像采集频率可达100 帧每秒[21],远优于CT扫描技术的采集频率[38];(3) 实验重复性好:微流体芯片的制作工艺精度较高[41],实现了对孔隙结构和注入/出口等关键性因素的精确可控,确保了实验结果的可重复性.
在以往的研究中,研究人员所使用的微流体模型图案大多是通过计算机生成的圆柱形孔隙结构,与自然界中实际的岩石孔隙有较大差异.因此,本文基于自主搭建的微流体模型−显微镜−高速相机实验平台,通过对真实砂岩孔隙微流体模型进行湿润性修饰,开展了不同湿润性条件下的两相驱替实验,研究了湿润性和流速对流体分布特征和驱替效率的影响规律,证实了亲水性介质中由于单支优势通道和“绕流”现象的发生,驱替效率显著小于疏水性介质,最后建立了考虑湿润性效应的毛细管数−驱替效率的关系式,进一步阐明了湿润性如何影响驱替效率这一问题.
1 实验方法
1.1 可视化实验平台
采用图1 所示的微流体可视化实验平台,开展水−气两相驱替实验.该平台主要包括微流体模型、成像系统和流量控制系统组成.为了较好地反映真实岩石的孔隙结构特征,基于真实砂岩的切面图案,委托微流控技术公司,在玻璃上(肖特B270)刻蚀如图1(b)所示的孔隙通道网络,定制了相应的微流体模型.模型长20 mm,宽10 mm,孔隙刻蚀深度为30µm,孔隙体积为3 µL,孔隙率为0.4.在成像系统方面,为了实时动态地捕捉微米和毫米级尺度下多相渗流的运动过程,在微流体模型顶端和底端分别安装了高速相机(滨松科研级CMOS) 和光学倒置显微镜(Axio-Observer).实验系统采用高精度注射泵(Harvard Apparatus 70−3007),实现注入流量从0.5 ∼50µL/min 范围内的精确可控.
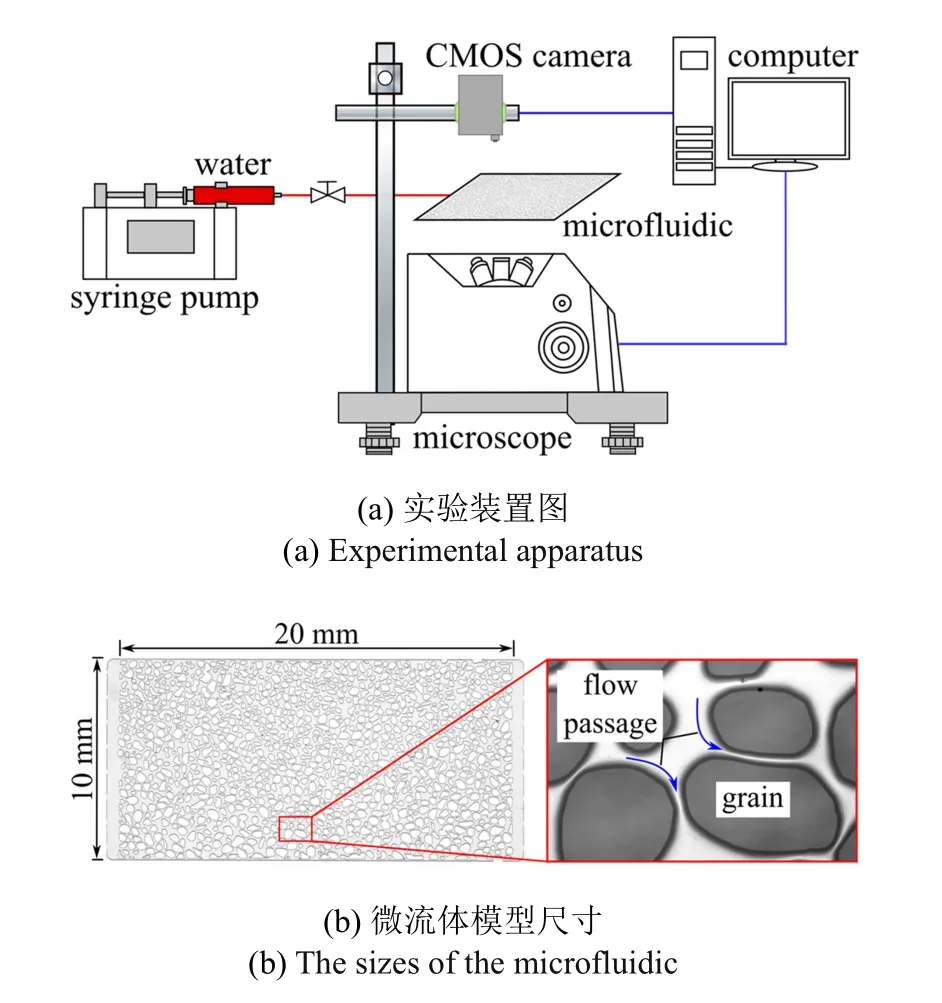
图1 微流体模型−显微镜−高速相机实验装置Fig.1 High-speed camera-microscopy-microfluidic experiment system
1.2 湿润性修饰
本研究中基于玻璃材质刻蚀得到的微流体模型,往往具有亲水性.由于玻璃表面容易受到杂质污染,接触角分布不均.为此,将浓硫酸(98%质量百分含量)和双氧水(30%质量百分含量)按7:3 体积比配制成食人鱼溶液[43],清洗微流体的孔隙通道,去除污物,同时产生大量羟基,确保壁面具有均匀的亲水特征(见图2(b)).
为了制备不同湿润性的微流体模型,本文使用硅烷偶联剂(正辛基三乙氧基硅烷)对微流体模型表面进行疏水处理[44-46].其原理为:玻璃表面经过食人鱼溶液清洗后带有大量的羟基,即含有大量的Si−OH键,硅烷偶联剂水解后会产生C−Si−OH 键,可与玻璃之间形成−Si−O−Si−,进而使得玻璃表面具有均匀的疏水特征(图2(c)).

图2 湿润性测量示意图Fig.2 Contact angle measurements under hydrophilic and hydrophobic conditions

图2 湿润性测量示意图(续)Fig.2 Contact angle measurements under hydrophilic and hydrophobic conditions(continued)
为了获得改性后微流体模型壁面的接触角,如图2(b) 和图2(c) 所示,首先将模型区域(20 mm×10 mm)划分成100 个网格(2 mm×1 mm),然后用显微镜随机选取每个网格内的一个固体颗粒−水−空气液面,以三相交汇处为顶点,分别以气−液接触面和固−液接触面的切线为两边确定三相接触角,采用ImageJ 软件的角度测量功能对每个网格内的接触角进行测量,最后将量取的所有液面进行统计平均得到接触角数值.
如图2(a)所示,微流体模型壁面在不同的区域,具有相对稳定的接触角.经统计,经过表面亲水性处理后的微流体模型,其接触角为25◦±5◦,而经疏水性处理后的接触角为105◦±5◦.
1.3 实验流程
在本文实验中,液态水和空气分别作为入侵相(invading phase)和被驱替相(defending phase).在实验之前,将湿润性修饰完成的微流体模型置于100◦C的烘干箱中10 h,确保模型处于干燥状态.然后,将染色的液态水(染色剂1%质量百分含量) 通过注射泵以定流量方式注入微流体模型中驱替空气.在驱替过程中,照相机和显微镜连续地采集流动过程的图像,直至入侵相流至模型的出口(突破).上述实验过程中,温度保持在25±0.5◦C;分别对亲水和疏水微流体模型开展0.5,1,5,10 和50µL/min 这5 组不同流量的驱替实验,总计10 组实验(表1).每片微流体模型只用一次并且对0.5µL/min 和50 µL/min 的工况重复进行3 组实验,以确保实验的可重复性.由表1 可知,5 组不同的流量,对应的毛细管数(lgCa)分别为−6.42,−6.12,−5.42,−5.12,−4.42,跨越两个数量级.这与CO2地质封存过程中CO2注入停止后地下水回流对应的毛细管数范围一致[47].与此同时,本文黏度比为M=55,也与地下水回流过程中超临界CO2-水的黏度比(M=26)[48]处于同一量级,具有代表性,都属于稳定驱替区域.
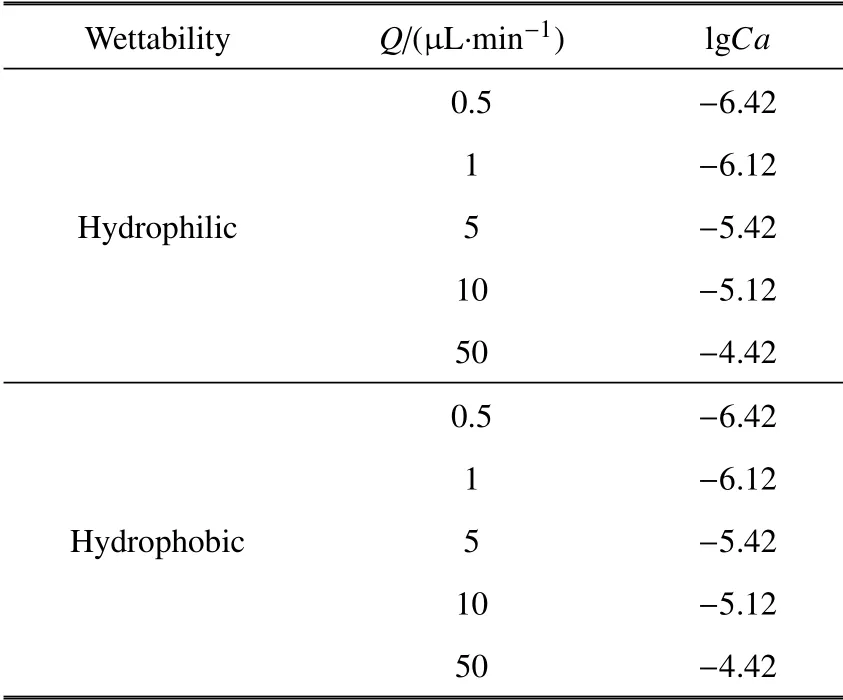
表1 实验条件Table 1 Experiment conditions
基于经典的孔隙介质两相渗流驱替模式相图[14,49],采用经典毛细管数(Ca)和黏度比(M)对流动特征进行刻画,Ca和M的定义如下

式中,µi为入侵流体的黏滞系数,µi=1 mPa·s,µ2为被驱替流体的黏滞系数,µ2=0.018 mPa·s,σ 为水的表面张力72.8 mN/m,v为入侵相流体的平均流速,v=Q/Ac,Q为注入流体的流量,Ac为微流体模型进口端的横截面面积,Ac=W×h=10 mm×30µm.
1.4 图像后处理
实验过程中高速相机对微流体模型内两相流的运动过程进行实时采集,通过高速相机采集的照片可以计算出驱替效率(Ed).具体步骤如下:首先,以未注入水的微流体模型图片为背景,注满水的微流体模型照片为前景,利用Matlab 程序进行图像“减”运算,消除不相关杂点的影响,计算出孔隙总体积;然后,将突破时的照片与未通水时的微流体模型照片相减,得到入侵相体积,将其除以孔隙总体积即为驱替效率.
为了检验本方法是否正确,本文对比了归一化(除以孔隙总体积)后注射泵实际注入的流体体积与通过图像后处理程序计算得到的流体体积,如图3 所示.由质量守恒定律可知,理论上两者的关系曲线斜率应该为1.由图3 可知,两者相差不超过8%,因此本文的图像处理技术可以满足精度要求.
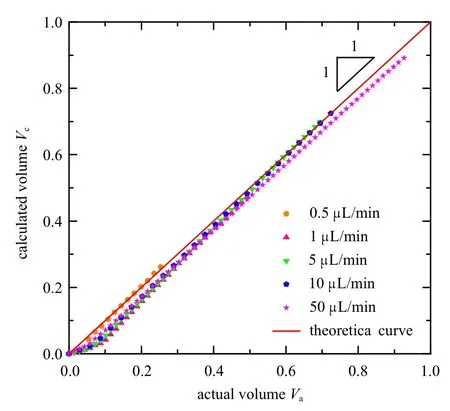
图3 入侵相体积的图像后处理值(Vc)和实际值(Va)对比Fig.3 Comparing the Vc (the calculated volume)with the Va(the actual volume)
为了进一步分析不同湿润性条件下两相流体的分布特征,本文对实验图片中的被驱替相(空气) 团簇进行提取,并计算相应的形态学统计参数,包括团簇的数量(N),团簇的最大半径(rmax),团簇的平均半径(ravg)和团簇半径的标准差(rσ).各个参数的定义如下
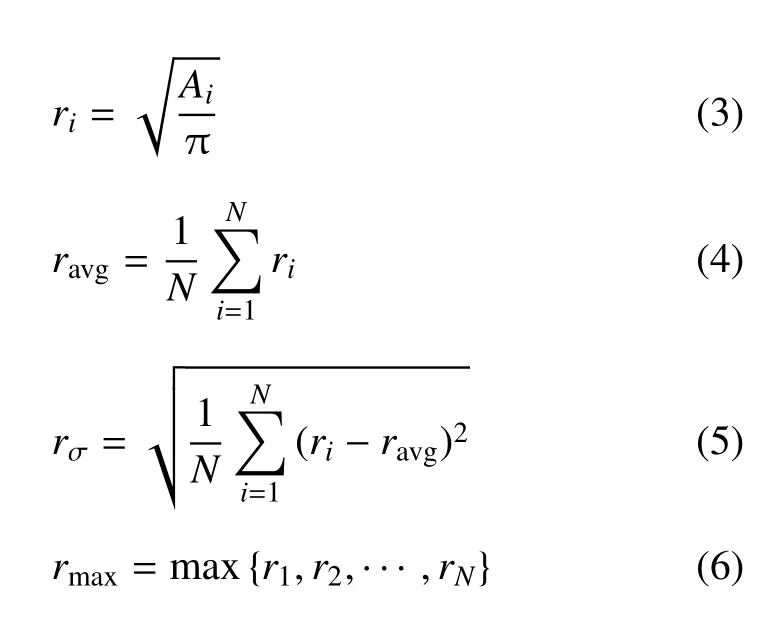
其中,Ai是团簇面积.
2 结果与讨论
2.1 孔隙介质中两相渗流的驱替模式
图4 给出了不同湿润性和流速条件下两相流体界面的推进过程.图4 中,入侵流体的颜色变化从蓝色至红色按照彩虹式渐进,代表实验从开始至突破时刻的时程变化.蓝色表示入侵流体刚进入微流体模型时刻的流体分布,红色代表入侵流体流动至最右端时刻的流体分布,而灰色和白色则分别代表被驱替相(空气) 和固相.在本文所开展的两相驱替实验中,水与空气的黏度比为M=55.基于经典的孔隙介质两相渗流驱替模式相图[14,49],对于排水过程(疏水性介质,即入侵相接触角大于90◦),在M>1 的区域,驱替模式随着毛细管数的增加由毛细指流(capillary fingering,CF)向稳定流(compact displacement,CD)发生转变.这一转变规律与图4(b)、图4(d)、图4(f)、图4(h)和图4(j)完全吻合.如图4 第二列所示,在低毛细管数下(lgCa=−6.42),两相渗流过程呈现出强烈的指流形态特征.受到毛细力的主导作用,两相流体界面的推进方向,可以与主流动方向不一致,出现垂直于主流动方向(图4(j)中的箭头1)甚至与主流动相反的方向(图4(j) 中的箭头2).随着流速的增大,毛细管数从lgCa=−6.42 增大到lgCa=−4.42,毛细力效应逐渐减弱,上述任意方向的驱替行为将受到明显的抑制,界面的推进方向趋向于主流动方向(图4(h)中的箭头3 和图4(b)中的箭头4),多相渗流流态从毛细指流向稳定流发生转变.
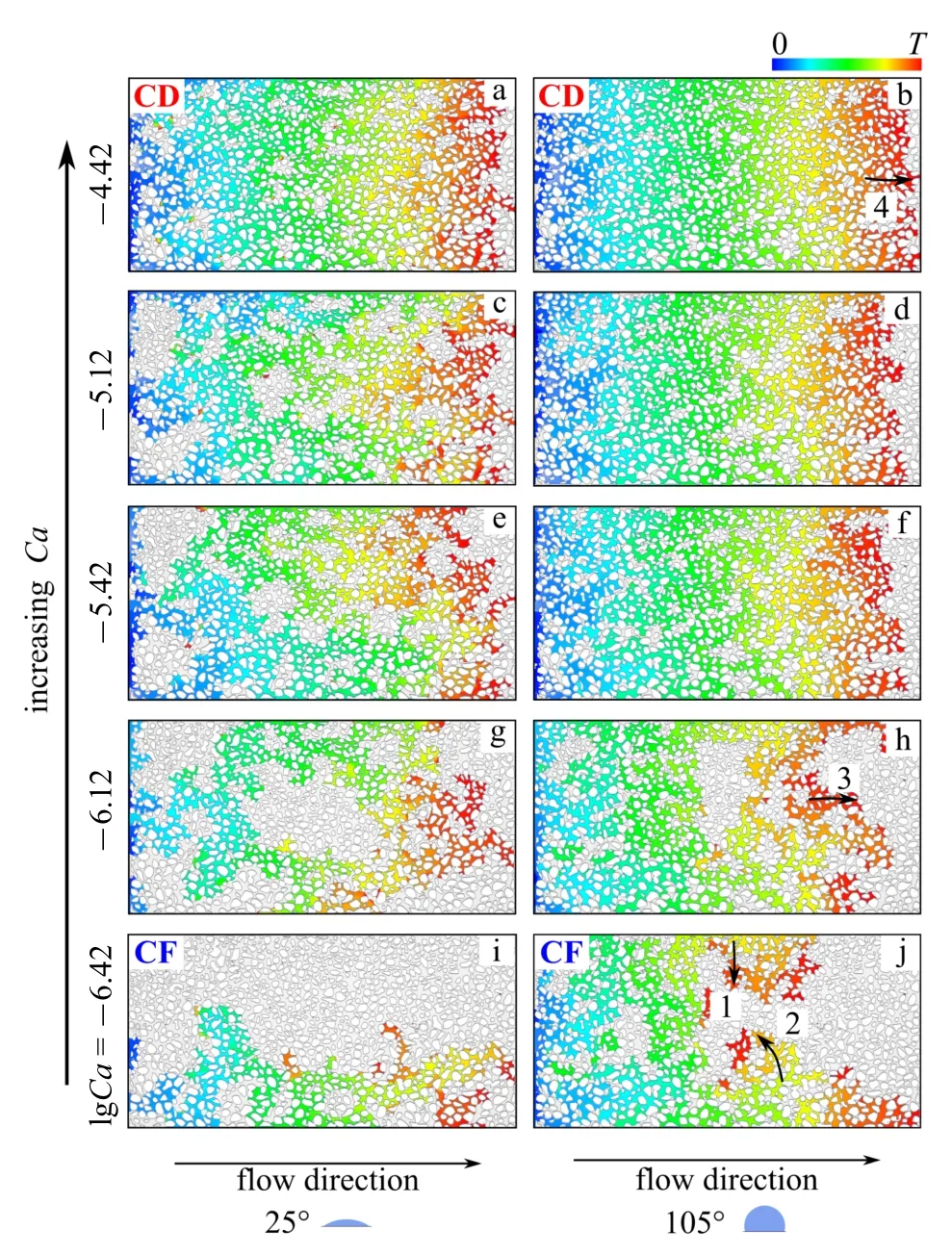
图4 湿润性和流速控制下的驱替模式Fig.4 The displacement patterns for different wettability conditions and capillary numbers
对于亲水性孔隙介质而言,如图4(a)、图4(c)、图4(e)、图4(g)和图4(i)所示,在低流速条件下(lgCa=−6.42),两相流体界面的推进过程与疏水性存在显著差异.尽管在该流速条件下,亲水性介质中也呈现出指流特征,但是,指进的宽度(图4(i))明显小于疏水性介质(图4(j)).随着流速的增大,黏滞力效应显著增强,两相流体的分布特征没有呈现出显著的差异(图4(a)和图4(b)对比).由此可见,湿润性对两相渗流驱替模式的影响,随着流速的增大而逐渐变弱,这一实验观测现象与以往的理论研究结论一致[16].对于另外一些学者的观点[32-36],他们认为当湿润程度增加时,驱替效率会随之增大.本文实验结果无法完全否定这一结论,其原因是这些学者所采用的孔隙结构大多是分布较为均匀的圆柱形结构,其连通性、孔喉分布与本文所用的微流体模型有较大差异.
2.2 突破时刻两相流体的分布特征
图4 给出了试样尺度下两相驱替过程中的流体动态分布特征,这些运动特征取决于孔隙尺度下界面的形态及其分布特征.基于本实验平台中的显微观测技术,图5 给出了突破时刻两相流体的两种不同的微观分布特征.在亲水性微流体模型实验中(图5(a)),空气团簇倾向于聚集、长条状并充满多个连续的孔隙;而在疏水性微流体实验中(图5(b)),空气团簇的分布则较为分散,被单独捕获在喉道处.此外,由于湿润性改变了流−流−固三相的接触特性,亲水性实验中两相流体界面曲率要明显大于疏水组.

图5 空气团簇形态图Fig.5 The shapes of trapped air clusters
为了进一步分析湿润性和流速如何影响两相流体的分布特征,本文对突破时刻的被驱替相(空气)进行提取,并基于式(3)∼式(6)计算了相关的统计参数.如图6 所示,亲水组实验中的N要小于疏水组实验,但是rmax大于疏水组实验.其原因是当微流体模型呈亲水性时,被驱替相倾向于形成连通的空气团簇并占据较大的孔隙体积(如图5(a)所示),因此rmax相对较大、但是N却较小;而在疏水组实验中,空气团簇以较小体积分散存在于喉道处(如图5(b)所示),较难形成较大体积的连通区域,因此rmax相对较小,但是N却较大.与此类似,亲水组实验中的rσ和ravg也均大于疏水组实验.
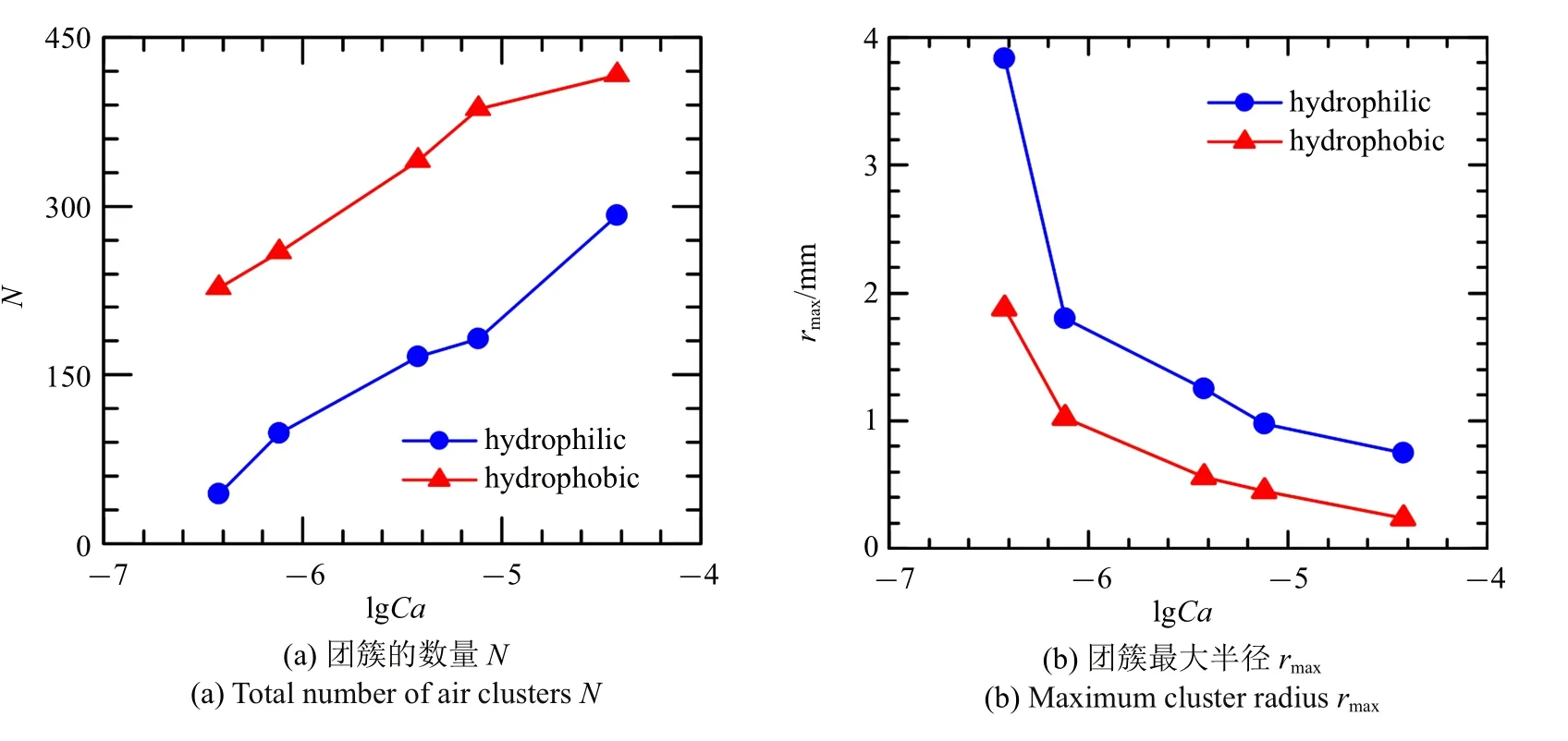
图6 被驱替相团簇相关统计参数随毛细管数变化关系图Fig.6 Trapped air cluster characteristics under hydrophilic and hydrophobic conditions

图6 被驱替相团簇相关统计参数随毛细管数变化关系图(续)Fig.6 Trapped air cluster characteristics under hydrophilic and hydrophobic conditions(continued)
当毛细管数增大时,从图6 中可以发现,无论是亲水组还是疏水组实验,N均随着毛细管数的增加而增大(图6(a)),而rmax,rσ和ravg随着毛细管数的增加而减小(图6(b)∼图6(d)).这是因为当流速增大时,体积较大的空气团簇发生了“破碎”现象[50-51].大团簇被入侵相冲击破碎后产生了许多小团簇,所以团簇数量增多,但单个体积却减小.在这个破碎过程中,每个小团簇的体积也变得更加均匀(图6(c)).与图4所呈现的规律一致,当毛细管数增大时,亲水组与疏水组实验中rmax,rσ和ravg的差异逐渐减小,表明湿润性对多相渗流的影响随着流速的增大而减弱.
2.3 湿润性对驱替效率的影响规律
上文分别从试样尺度和孔隙尺度分析了湿润性对驱替模式和流体分布的影响规律.这些定性和定量分析,为研究湿润性对驱替效率的影响机制奠定了基础.基于1.4 节中所述的图像后处理方法,本文计算了亲水性和疏水性共10 组实验的驱替效率.如图7 所示,当毛细管数较小时,在亲水组实验中,入侵相会呈现出特殊的单支流动结构(图7(b),图7(d)),指进前端会沿着单支优势通道推进.这一流动结构与毛细管数无关,即使在大毛细管数条件下也能够发生(图4(c) 和图4(e)).此外,与疏水组实验对比,亲水性微流体模型中的指进宽度较小,指进的形成与发展较快.其原因是,在亲水性孔隙介质中,由于水与孔隙壁面较强的亲和能力,毛细力效应显著,入侵相形成较细的毛细指进.这些毛细指进,往往形成“绕流”现象,进而捕获较多的空气团簇(trapped air),如图7(b)和图7(d)所示.最终,在亲水性条件下,驱替效率将显著减小.而在疏水组实验中无法观察到明显的单支流动现象,指进宽度较大,指进前端的发展速度较慢,“绕流”现象受到抑制,驱替效率较高(图7(c) 和图7(e)).由此可见,本文的实验结果证实了以往的研究结论[37-39],即在亲水性(25◦) 条件下,由于单支优势通道和“绕流”现象的发生,驱替效率显著减小.
当毛细管数较大时,黏滞力占据主导地位,湿润性对驱替效率的影响程度受到抑制.驱替形态从毛细指进演变成稳态驱替,驱替锋面较为平缓,驱替效率较高.基于疏水性和亲水性条件下驱替效率的实测数据,发现驱替效率和毛细管数近似满足线性关系(图7(a))

式中,亲水性条件下,α=0.30,β=2.26;疏水性条件下,α=0.16,β=1.70.
在图7(a) 中,由于毛细管数是基于式(1) 确定的,该式中没有包含刻画湿润性的相关参数.因此,图7(a) 中给出的Ed–Ca关系式,无法考虑湿润性的影响.为了建立不同湿润性条件下Ed–Ca的统一关系,本文参考以往研究[52-53],引入接触角θ 对毛细管数进行修正,给出了修正毛细管数Ca∗
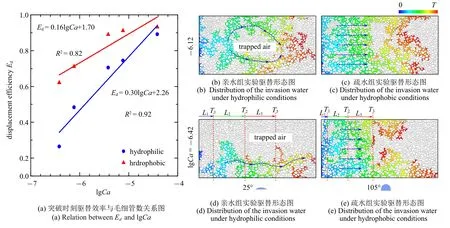
图7 湿润性对驱替效率的影响Fig.7 Effect of the wettability on displacement efficiency
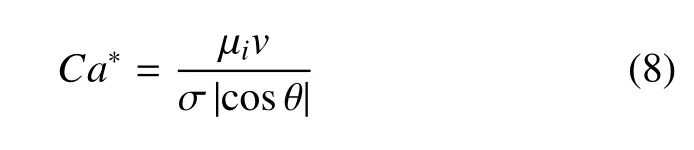
基于式(8),驱替效率与修正毛细管数的关系曲线如图8 所示.由图可知,不同湿润性条件下,实验数据均匀分布在趋势线的两侧,驱替效率与修正毛细管数呈现较好的线性相关关系.因此,该相关关系提供了不同湿润性条件下驱替效率的潜在预测方法.但是,在试样尺度或者更大尺度(如场地尺度),这种流动机理的影响如何,需要进一步研究.

图8 驱替效率与修正毛细管数的关系Fig.8 Relation between Ed and Ca∗
此外,式(8)只适用于高黏度流体驱替低黏度流体情况.对于低黏度流体驱替高黏度流体的非稳定驱替情况,驱替模式的转变特征与本文的研究结论有差异.对于后者,驱替模式将由毛细指流转变到过渡流然后转变为黏性指流,且湿润性对驱替模式的转变规律具有显著影响[54].
3 结论
本文利用自主搭建的微流体模型−显微镜−高速相机实验平台,开展了砂岩孔隙微流体模型中的两相驱替可视化实验,研究了湿润性和流速对两相渗流运动特性的影响.主要结论如下:
(1)在不同湿润性条件下,驱替模式随着流速的增大都由毛细指流向稳定流发生转变;
(2) 湿润性对两相流体的分布特征具有显著影响.受到毛细力效应的影响,亲水性介质中被驱替流体团簇的数量小于疏水性介质,而被驱替流体团簇的最大半径、平均半径和方差均大于疏水性介质;
(3) 亲水性介质中单支优势通道和“绕流”现象的发生,显著降低了驱替效率;建立了考虑湿润性影响的驱替效率和毛细管数之间的统一关系式,提供了一种对不同湿润性条件下驱替效率的潜在预测方法.
