基于航迹规范模型的航空器尾流间隔安全分析∗
2021-05-25
(中国民用航空飞行学院空中交通管理学院 广汉 618307)
1 引言
随着我国民航业的快速发展,机场航班时刻越来越密集,为尽可能利用终端区的空域资源来提高机场跑道容量,终端空域间隔都在不断被优化压缩,随之而来的飞机间碰撞风险问题就需要进行探讨研究。
国外研究碰撞较早,1966年~1968年P.G.Reich就已经发表了关于空中交通间隔标准研究的论文,当时Reich模型主要用于满足减少北大西洋空域横向间距的碰撞风险分析的需要[1]。2003年,Peter Brooker提出了Event模型,该模型是在REICH模型的基础上加以改进而来[2]。2006年,Peter Brooker运用他所提出的EVENT模型对航空器纵向飞行风险进行了评估[3],同年,Theresa Brew⁃er等,在Reich模型的基础上,建立了增强导航性能的碰撞风险计算的模型[4]国内研究碰撞风险开始较晚,2009年张雄旗研究了基于ADS-B下的平行航路飞行间隔[5];2014年高扬,刘单单针对我国低空空域不断开放,通航产业的迅速发展,研究了低空开放后航空器碰撞风险预测[6];2015年王莉莉,刘洋为解决航空器在空中高速路中的运行安全问题,对空中高速路平行航路换道模型进行了研究[7];2016年张兆宁,时瑞军通过建立一个圆形碰撞区域对两架航空器进行碰撞风险计算[8];2019年叶右军对飞机进近着陆阶段的碰撞风险模型进行了研究[9]。
模型的发展和改进虽多,但是每个碰撞计算模型考虑的因素参数过多,在航线轨迹规划时需要查找的因素过多,计算不便。面对这个问题,我们在此提出了一种新的检测算法,并运用到软件中去模拟计算。结果表明,采用轨迹规范模型后,新算法与原有碰撞模型算法相比都可判断出尾流间隔是否合理,两者具有相同的效力。
2 OAS面和RNP
2.1 OAS面概括
机场终端区精密航段的保护区使用障碍物评价面(OAS面)来确定,OAS面是在基本ILS面之上的一组障碍物评价面,它由六个斜面(X面、Y面、W面和Z面)以及包含跑道入口的水平面组成,如图1、2所示。
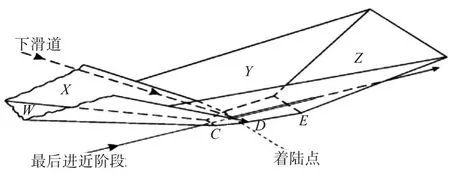
图1 OAS面立体图
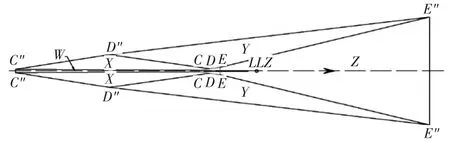
图2 OAS面平面图
各个斜面可以各用一个线性方程来表示:Z=Ax+By+C[10],式中x,y为障碍物坐标,Z为障碍物所在位置的OAS面高,A,B为各斜面沿X,Y方向的斜率,C为斜面的截距。OAS面中六个斜面的具体位置和高度方程的参数受诸多因素的影响,例如精密进近类型、下滑角度、航空器机身尺寸以及复飞梯度等,计算程序较为复杂,可以通过一款软件,进行W面、X面、Y面和Z面的生成。
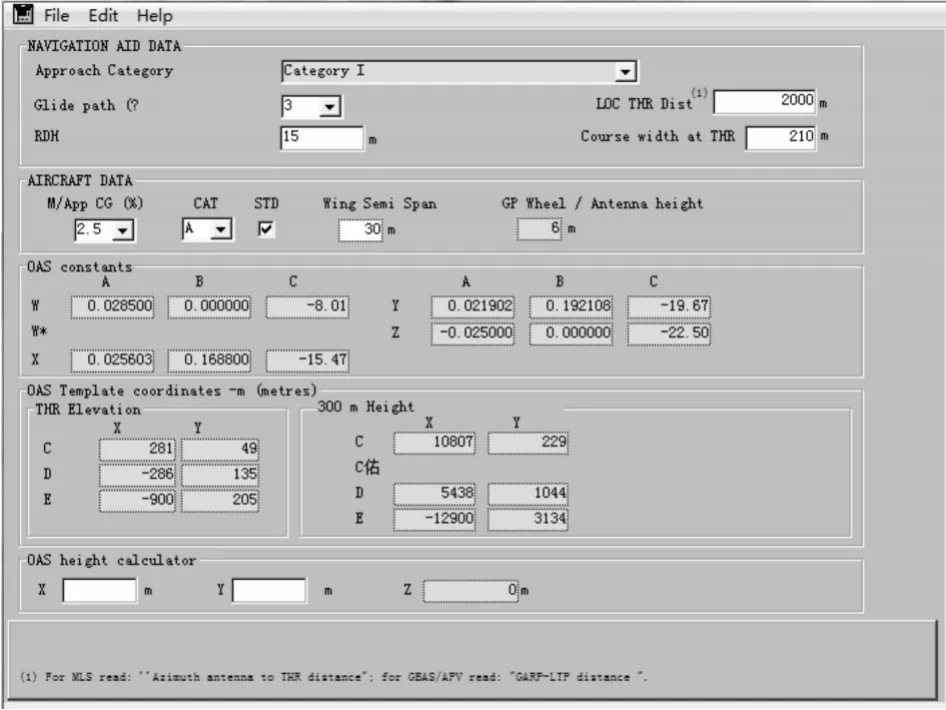
图3 OAS面设计软件
2.2 所需性能导航(RNP)
RNP是建立在RNAV基础上的一种全新的导航技术,引入了容差的概念,以概率的形式控制和预测导航精度,并能随时监控航迹误差。容差定义RNP导航系统性能的相关参数,包括容差完整性、容差连续性和容差域。
3 模型的建立
3.1 事件模型
目前针对尾流间隔的安全问题我国学者主要从传统碰撞模型,例如事件模型等其他模型的角度出发,通过研究在现行规定的尾流间隔标准条件下,航空器之间是否存在碰撞风险以及碰撞概率是否符合安全目标等级要求,来验证尾流间隔的安全性与合理性。
事件模型是指空中飞行的两架航空器A1和A2,将A1航空器拟定为一个长方体空间,长方体空间的长、宽、高分别是航空器A1机身长度、翼展长度、机身高度的两倍,航空器A2拟定为一个质点并在其周围定义一个间隔薄板。当长方体空间穿越间隔薄板时,则称一次碰撞现象发生,此时长方体空间与质点的距离小于规定的间隔标准。
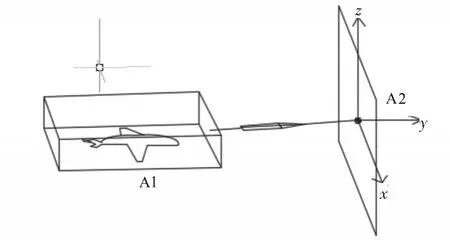
图4 事件模型
则单位时间内发生飞行碰撞的概率N为


式中:GERh为是每小时内丢失间隔的频率,L是纵向间隔,E(S)、E(0)为分别是在2L距离内的同向、反向飞行的飞机对数,λx、λy、λz分别为碰撞盒的长、宽、高,U、V、W是同向飞行时A机穿越B机的间隔片时在纵向、侧向和垂直方向的相对速度,PZ(0)为垂直重叠概率。
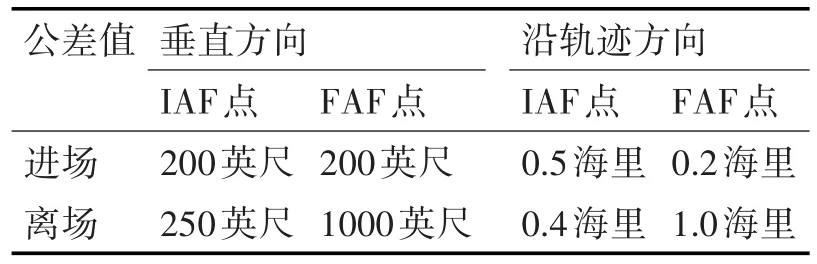
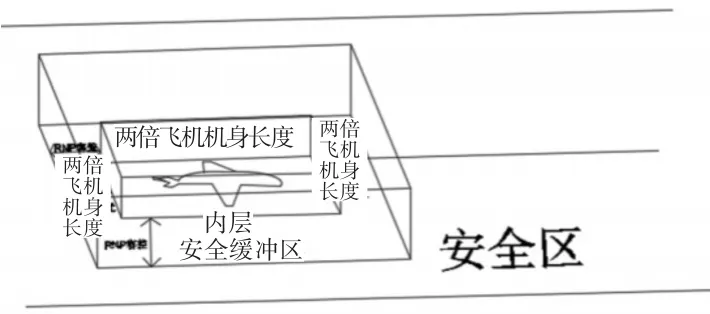
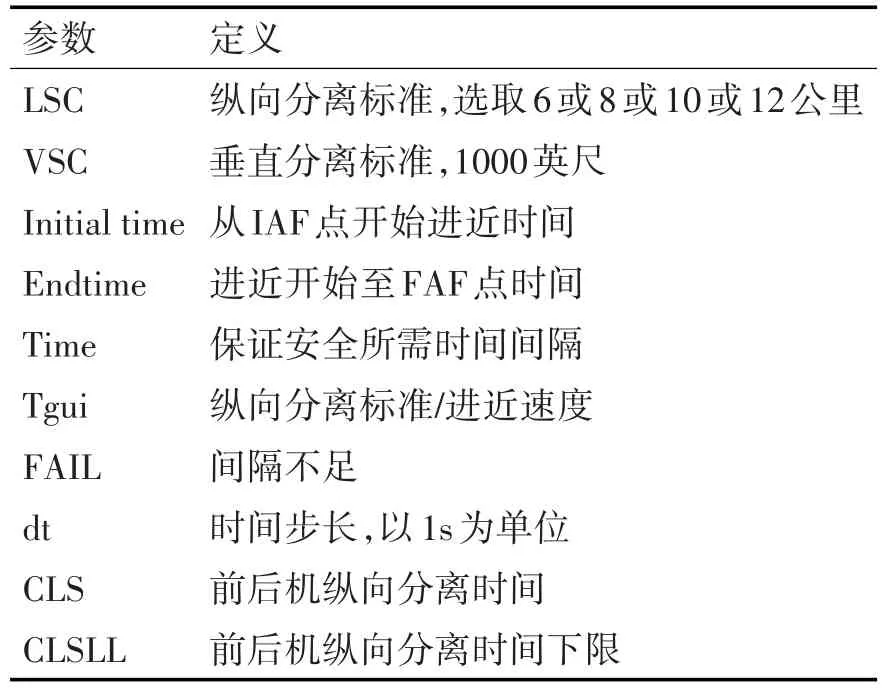
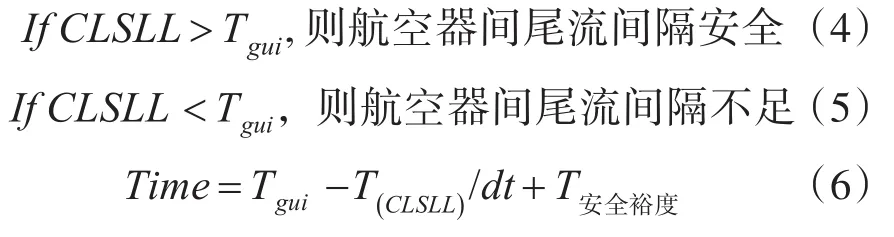
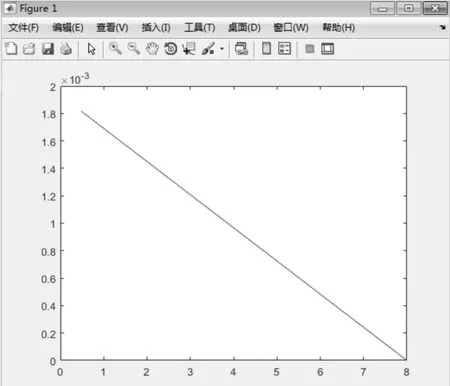
在航空器纵向飞行过程中,飞机间纵向距离主要受到飞行员对油门的控制以及顺逆风的影响,在已知航线的情况下,飞机的飞行距离认为是服从正态分布的随机变量。设μchu、σchu是航空器一开始飞越导航台的纵向距离的平均值和标准偏差,μL、σL是飞机距导航台距离为L时飞机纵向偏航距离的平均值和标准偏差,λu、λσ是平均值和标准偏差的增长系数。由于μL和σL是飞机距导航台距离为L的一次函数,即μL=μchu+λμL,σL=σchu+λσL,则有YC~N[μchu+λμL,(σchu+λσL)2]。设飞机的初始位置为Y,由此可以得出飞机A1,A2的纵向距离为YA1=Y1+YC1,YA2=Y2+YC2。此时两架飞机之间的纵向距离为S=|YA1(L1)-YA2(L2)|。假定μchu1=μchu2=μchu,L1=L2=Lσchu1=σchu2=σchu,λσ1=λσ2=λσ,λμ1=λμ2=λμ,则S~N[(Y2-Y1),2(σchu+λσL)2]。为了保证飞行安全,研究间隔最小值将会很有价值意义,而碰撞应当发生在两架飞机之间间隔为零时,在此定义两架飞机之间的间隔很小,以至于它可能导致飞机之间发生摩擦碰撞,在这里讨论两架飞机间隔小于机身长度R的情况。R=planeA机身长/2+planeB机身长/2。S是飞机之间纵向距离,当S 研究GERh与PX(SX)可发现,两者之间与速度矢量和机身长度相关联,因此有 传统事件模型的考虑因素较多,计算复杂,为此,提出一种轨迹规范模型,轨迹规范的主要思想是限制航空器偏离指定的参考轨迹,以便飞行中任何给定时间的飞机位置都被约束到精确限定的空域范围之内,从而保证航空器之间满足规定的间隔。以所需的导航性能-(RNP)的导航方式为例,通过将垂直方向和沿轨迹纵向的公差添加到RNP的公差里来明确地限制在X,Y,Z三个轴上的指定轨迹的偏差,只要航空器保持其与指定轨迹的公差一致,计算出无碰撞时间,那么该范围内的航迹规范就可以保证飞行所需的安全分离,具体公差值如表1所示。在此基础上,以传统的飞行程序设计图为基础,定义了新的航迹规范。航迹规范模型分为内层和缓冲层。由于机场终端区域情况复杂,为了保证安全运行,内层以航空器两倍尺寸体积为设计,安全缓冲区以RNP导航的公差来设计,如图5所示。 表1 轨迹公差(+-) 图5 轨迹规范模型 现行规范条件下,终端区当飞机之间的纵向间隔达到或超过对应标准:6km,8km,10km,12km时(根据不同的机型来选取不同的尾流间隔)垂直间隔达到或者超过1000ft时,就满足规范,不需要进行碰撞检测;否则,就要进行检测。为了检测方便,提出了所需空间分离检查的时间步长法。将轨迹长度转换为时间间隔变量,即以终端区进近的重型,中型和轻型飞机的平均速度来衡量,只有当小于或接近最小所需时间间隔时,才需要指示航空器进行机动操作。具体参数定义如表2所示。 表2 具体参数定义 可得检测公式: 以盐城/南洋机场22号跑道为例,IAF(YN206)到FAF距离大致为20.2km采用提出的新方法计算,前机为B737,后机为ARJ21,两机进近过程中B737先减速,因此假定平均速度VB=300km/h,VA=350 km/h,则二者纵向间隔时间下限,这时两者飞行间隔只有0.48km,需要重新设计,后机ARJ21开始进近时间需要延后至少Time=Tgui-TCLSLL+T安全裕度=397.4+T安全裕度s。其中,所以Time=586s,此时两架航空器尾流间隔d=50000×586÷3600=8138m,取整为8km。 采用事件模型计算,随着我国管制技能以及飞机性能的不断提高,违反纵向间隔的概率不断降低,参考文献[11~13]可得出如下参数。 表3 相关参数 假定前后两机距离间隔即Y2-Y1分别为0.48km和8km,飞机相对距离变化λσ1=λσ2=13.9 m/s。将上述参数带入式(1)~(3)可求得: N1=0.0018次/飞行小时 N2=1.2768×10-9次/飞行小时 规定的安全标准为1.5×10-8次/飞行小时,通过代入至计算程序中可发现,原先的航班进近规划不符合安全标准,改进后的航班进近规划符合安全标准,并且可得出不同尾流间隔与碰撞率之间的函数关系图像如图6所示。 图6 不同尾流间隔与碰撞率之间的函数关系 经过以上测试计算可发现,提出的基于航迹规范模型的尾流间隔安全检测算法在模拟实践中的检测结果与采用传统事件模型的测评结果相一致,并且新的算法还给出了保证尾流间隔安全所需时间间隔的计算方法。证明了所提出的新的尾流间隔安全检测算法的正确性和初步的可行性。

3.2 航迹规范模型
4 实例计算
5 结语
