无线传感器网络数据传输路径目标识别方法*
2021-05-24朱永琴田二林
朱永琴,田二林
(1. 黄河交通学院 机电工程学院,河南 焦作 454950; 2. 郑州轻工业学院 计算机与通信工程学院,郑州 450003)
目标识别是将一个特殊目标从众多目标中识别出来的过程,目标识别技术在空间技术以及国防领域均有着十分广泛的应用[1].将目标识别技术应用至无线传感器网络数据传输路径识别中,可有效提高数据传输效率,降低数据传输能耗,对数据传输而言十分重要[2-3].鉴于无线传感器网络数据传输路径目标识别的关键作用,秦鹏等[4]提出基于异步隐马尔可夫的目标识别方法.在HSV颜色空间通过背景差分法得到视频中多目标的准确位置,在多目标位置中,选择目标位置和方向角当作观测值.将多目标数据关联目标问题转换成轨迹识别问题,利用异步隐马尔可夫中新增的时间标示以及时变转移矩阵增强数据关联的精准性.仿真结果表明,该方法目标识别准确性较为可靠,但过程繁琐,识别过程所用网络能耗较高.史鹤欢等[5]提出基于优化CNN的目标识别法.根据主成分分析技术对一组特征集合进行训练,完成CNN初始化,并将线性修正函数当作非线性函数,对数据特征的局部对比度进行标准化,实现目标识别.但随着识别时间的延长,识别过程中干扰因素的变动会影响识别精准性,导致该法持久性较差.邬战军等[6]提出基于SR和BP网络的识别法.算法首先提取空间目标HOG特征,将特征提取结果进行降维,并将降维之后的数据利用BP分类器实施训练识别.所提方法识别具有较好的稳定性,但识别延迟率较高.
针对当前数据传输路径目标识别相关方法中存在的问题,本文提出了一种基于粒子群的无线传感器网络数据传输路径目标识别方法.
1 路径目标识别算法
1.1 干扰抑制
为更加准确实现无线传感器网络数据传输路径目标识别精度,降低识别过程中的网络能耗,本文对传感器网络传输路径中的频带干扰进行了抑制[7].抑制过程中,将无线传感器网络数据传输路径中两个相邻的奇异值的比值进行计算,据此得出数据传输空间维数的估计值及数据传输路径噪声功率估计值,并利用滤波函数将噪声滤除.
在部分频带干扰环境下,无线传感器网络数据传输矩阵的奇异值变化比较迅速;而信号噪声子空间中的奇异值变化比较平缓,且比干扰相对应的奇异值小,则可将相邻奇异值的比值F表示为
(1)
式中:αq+1、αq为两个相邻的奇异值;q为奇异值位置.
当F值分布在1周围时,对无线传感器网络数据传输空间维数的估计值进行计算,即

(2)

在获取干扰维数之后,即可确定无线传感器网络数据传输路径中信号的噪声子空间,同时可从中获取噪声功率估计值.对噪声功率估计值进行滤波,可得到无线传感器网络数据传输路径原始信号.
1.2 路径识别过程
基于无线传感器网络数据传输路径干扰抑制结果,分别对路径传输效率、路径剩余负载率、有效带宽估计值进行计算,得到数据传输路径目标识别决策函数.采用粒子群法对目标函数进行求解,设置粒子群初始化参数,并计算粒子适应度值,更新粒子运行速度和位置,直到达到最大迭代次数或找到数据传输路径目标识别决策函数最优解,以此完成无线传感器网络数据传输路径目标识别.
利用平均数据帧的传输效率E来表示每条链路质量以及拥塞状况,同时将其当作无线传感器网络数据传输路径目标识别判决参数之一.传输效率可表示为
(3)

根据式(3)即可获取整条路径的数据传输效率表达式为
(4)
式中,p为无线传感器网络数据传输过程中的所有路径.网络中任意路径剩余负载率表达式为
(5)
式中:mi为节点固定数据存储区域容量的大小;bi为无线传感器网络数据缓存区域已经被占的空间大小.


θ=c′lgε
(6)
式中,c′为无线传感器网络数据传输信道恒定服务率.
在无线传感器网络数据传输路径目标识别时,需要判断路径优劣,在该过程中,要综合考量各路径的质量.本文通过HEAOR路径选择法选择无线传感器网络数据传输路径识别决策函数值中最大的路径,以完成数据传输.将数据传输路径目标识别决策函数定义为
F′(E,ηB,LP′,θ)=w1ηB(c)+w2E+
w3LP′+w4θ
(7)
式中:w1、w2、w3和w4为加权因子,其是由各路径质量所决定的,质量越好,加权因子越大,本文取值分别为0.2、0.6、0.8、1.2;ηB(c)为无线传感器网络数据传输路径归一化后的有效带宽.
利用粒子群算法对无线传感器网络数据传输路径目标识别决策函数进行求解.粒子群的值随着无线传感器网络数据传输路径的变化而变化,设定粒子群初始化取值为20,然后对粒子维数、粒子数量进行设定.对粒子Xi′进行初始化,粒子每维位置、速度于解空间范围也随之初始化,各粒子的历史最优值为pB,各粒子适应度值计算表达式为
(8)
式中:f(Xi′)为粒子的适应度值,并将其中适应度值最小的记作gB;xn″+1、yn″+1为粒子即将要前往的位置横、纵坐标值;xn″、yn″为粒子当前位置的横、纵坐标值.
粒子速度更新表达式为
vid(t+1)=Wvid(t)+e1r1+
e2r2[g″d(t)-xid(t)]
(9)
式中:vid(t+1)为更新后的粒子速度;vid(t)为粒子当前速度;e1、e2为加速因子;r1、r2为[0,1]之间的随机数;g″d(t)、xid(t)为gB和pB中的参数值;W为非负常数,该参数可使得出的粒子速度值不仅可以控制速度权重,还能够有效提升无线传感器网络数据传输路径目标识别速度,即迅速识别出数据传输的最优路径目标[10].
粒子位置更新表达式为
xid(t+1)=xid(t)vid(t+1)
(10)
式中:xid(t+1)为更新后的粒子位置;xid(t)为当前粒子位置.
分别对式(8)~(10)进行迭代,直到达到最大迭代次数或找到无线传感器网络数据传输路径目标识别决策函数最优解.
2 实验结果与分析
以验证基于粒子群无线传感器网络数据传输路径目标识别方法的有效性为目的,在无线Mesh骨干网络条件下对所提方法进行验证.无线Mesh骨干网络是一种无线网状网络,是一项与传统无线网络完全不同的新型无线网络.实验中,将骨干网络看作源、目的节点的数据传输路径,数据传输的起止点为无线Mesh骨干网络中两个不同的节点,实验场景大小为1 140 m×1 140 m.图1为本文算法与基于优化CNN算法的识别准确率对比图.

图1 不同目标识别方法识别准确率对比Fig.1 Comparison of recognition accuracy with different target recognition methods
分析图1可知,基于优化CNN的目标识别方法识别准确率呈“M”变化趋势发展,识别准确率最高为80%.基于粒子群的无线传感器网络数据传输路径目标识别方法随着实验次数和识别时间的不断增加,识别准确率略有波动,但不影响整体识别准确率的提升,最高可达99%.
表1为本文算法与基于SR和BP网络算法的识别延迟对比情况.O0代表实验次数,O1代表基于SR和BP网络的识别法平均识别延迟,O2代表本文方法平均识别延迟.
由表1可知,在不同的实验次数下,基于SR和BP网络的算法总平均识别延迟为10.9 μs,而本文算法的总平均识别延迟为1.8 μs,对比可知所提方法识别延迟更低,更具有可行性.
表2为本文算法与基于异步隐马尔可夫的目标识别方法的能耗对比情况.U0代表识别时长,U1代表基于异步隐马尔可夫的目标识别方法识别能耗,U2代表本文算法的识别能耗.
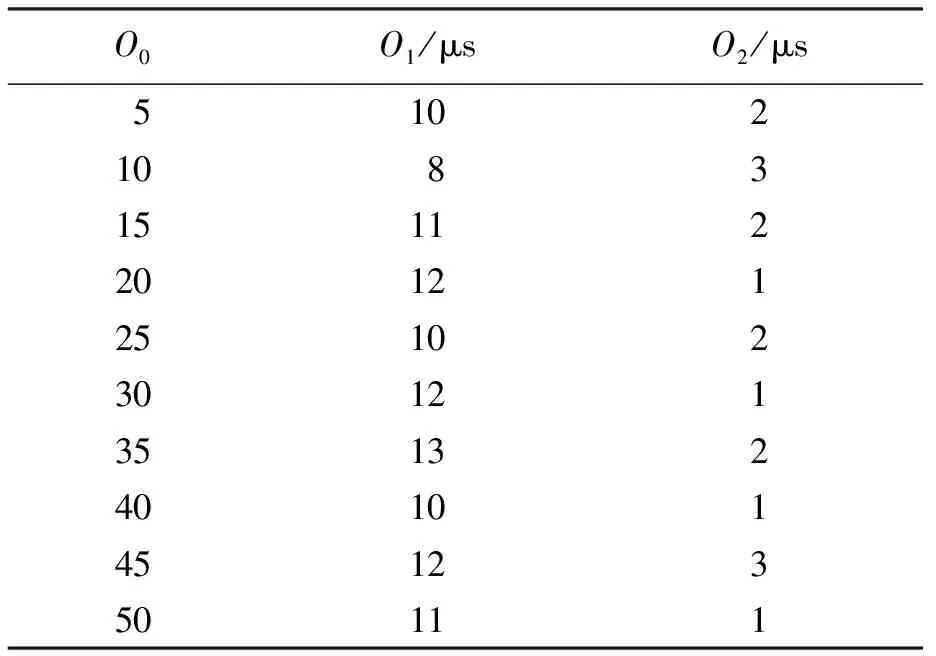
表1 不同方法识别延迟对比Tab.1 Comparison of recognition delay with different methods
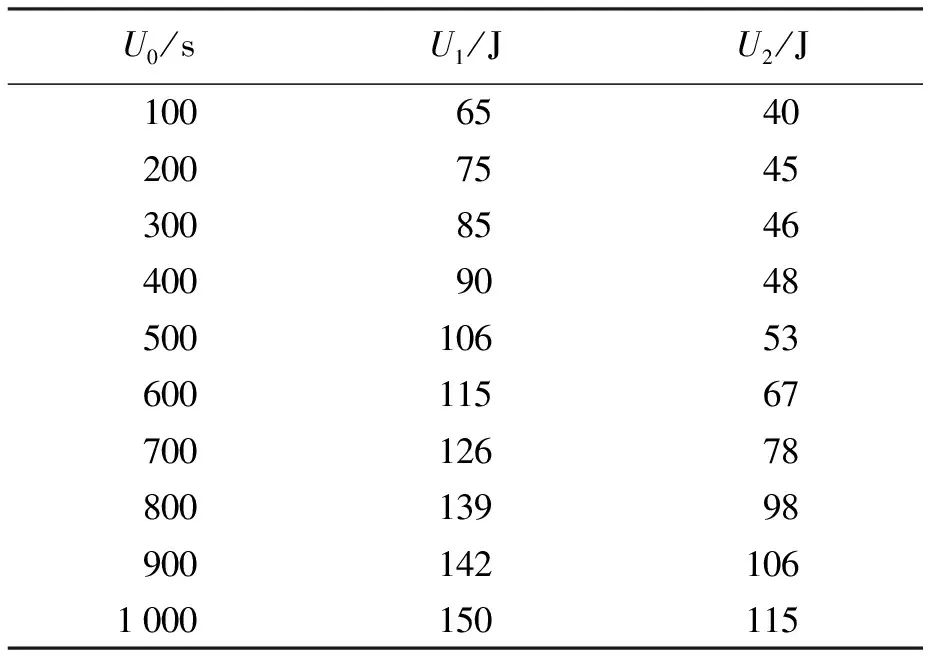
表2 不同方法识别能耗对比Tab.2 Comparison of recognition energy consumption with different methods
根据表2得知,基于异步隐马尔可夫的目标识别方法识别平均能耗为109.3 J,而本文方法识别能耗平均为69.6 J,所提方法相较当前方法运行能耗减少39.7 J,更具实用性.
3 结 论
本文提出了一种基于粒子群的无线传感器网络数据传输路径目标识别方法.通过对传感器网络传输路径中频带干扰进行抑制,提高了目标识别准确率、降低了识别能耗和识别延迟.利用路径传输效率、路径剩余负载率、有效带宽估计值制定网络数据传输路径目标识别的目标函数,并采用粒子群法对目标函数进行求解,进一步提高识别准确性.实验结果表明,所提方法识别准确率高,且延迟和能耗均较低,具备较好的实用价值.
