耙吸挖泥船疏浚设备操控智能化系统的开发
2021-05-23董恒瑞
董恒瑞

摘 要:通过开发耙吸挖泥船疏浚设备操控智能化系统,使繁琐的控制过程简单化;智能化诊断及故障情况判定,便于操控人员快速识别及排除故障。
关键词:耙吸式挖泥船;逻辑规则;智能化
中图分类号:U664.82 文献标识码:A
Abstract: Through the development of intelligent control system for dredging equipment of trailing suction dredger, the automatic serialization control of dredging equipment makes the complicated control process simple and intuitive. Intelligent diagnosis and fault determination are convenient for operators to quickly identify and eliminate faults.
Key words: Suction hopper dredger; Logic rule; Intelligent
1 前言
随着耙吸挖泥船参与的疏浚工程对工期和质量要求越来越高,特别是业主更强调繁忙航道作业中的耙吸挖泥船先行避让的要求,对耙吸挖泥船舶操控安全、疏浚工艺的要求也不断提高。
目前,传统的耙吸挖泥船需要船员在操控台上根据当前工况、现场环境、设备状态等,操作一系列的开关按钮或手柄等来操作控制施工机具设备。这种控制过程以相互独立的分散式操作为主,虽然系统具备各局部单元的自动化控制和基本的诊断功能,但距离智能化控制还存在一定的差距,尚不能解決因操作人员的操控差异带来的施工效率上的差异。因此,在更高程度的全系统自动化、智能化疏浚方面的发展还有较大的提升空间。
通过研究耙吸挖泥船施工机理及对应的疏浚设备的智能化控制策略,为船舶开发耙吸挖泥船疏浚设备操控智能化系统,增强船舶控制的自动化程度和智能化水平,有效避免操作人员的水平带来的工作差异,通过简化操作过程来提高效率。
2 操纵智能化系统构成
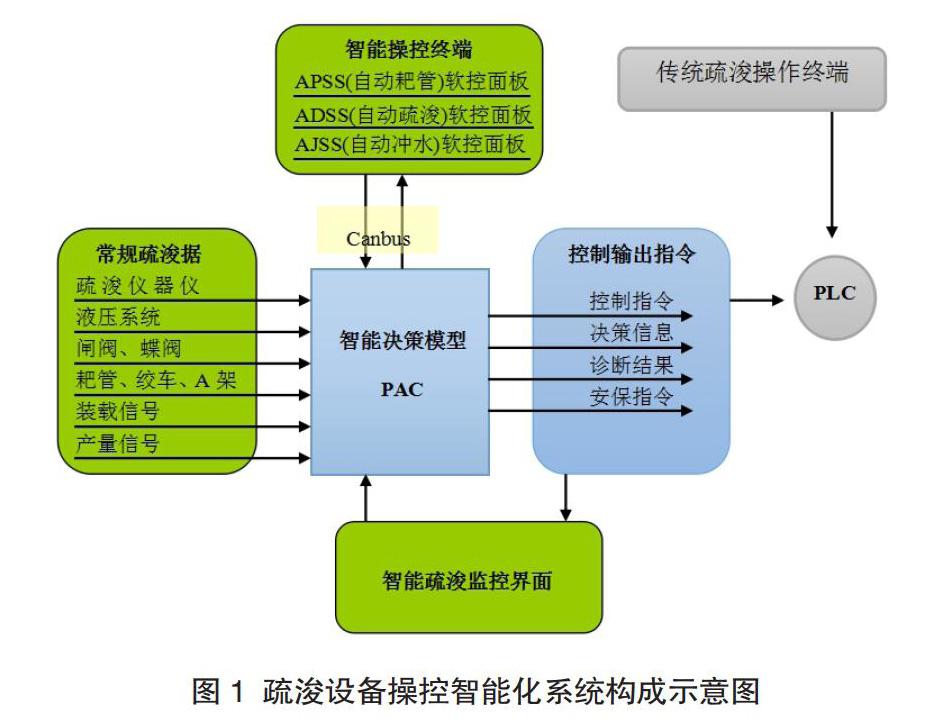
耙吸挖泥船疏浚设备操控智能化系统,基于可编程嵌入式控制器(PAC)。PAC内嵌智能控制决策模型,通过实时采集疏浚监控系统数据,配合智能操控终端,向系统PLC控制器输出控制指令,激活、执行各种过程控制,通过系统界面把控操作过程及状态。智能化子系统构成示意图,如图1所示。
3 操纵智能化系统主要功能
操纵智能化系统功能,基于疏浚作业阶段自动判断模型(DPADS)的3大功能模块:自动耙管(APSS)序列化控制;自动疏浚(ADSS)序列化控制,自动冲水(AJSS)序列化控制。
3.1疏浚作业阶段的自动判断模型(DPADS)
疏浚作业阶段自动判断智能模型(DPADS)集成在位于疏浚控制台的PAC中,主要针对各作业阶段智能识别及综合控制,其功能包括:设备动作进程识别及作业阶段的判定、设备及控制过程安全保护和报警。
3.1.1控制过程序列
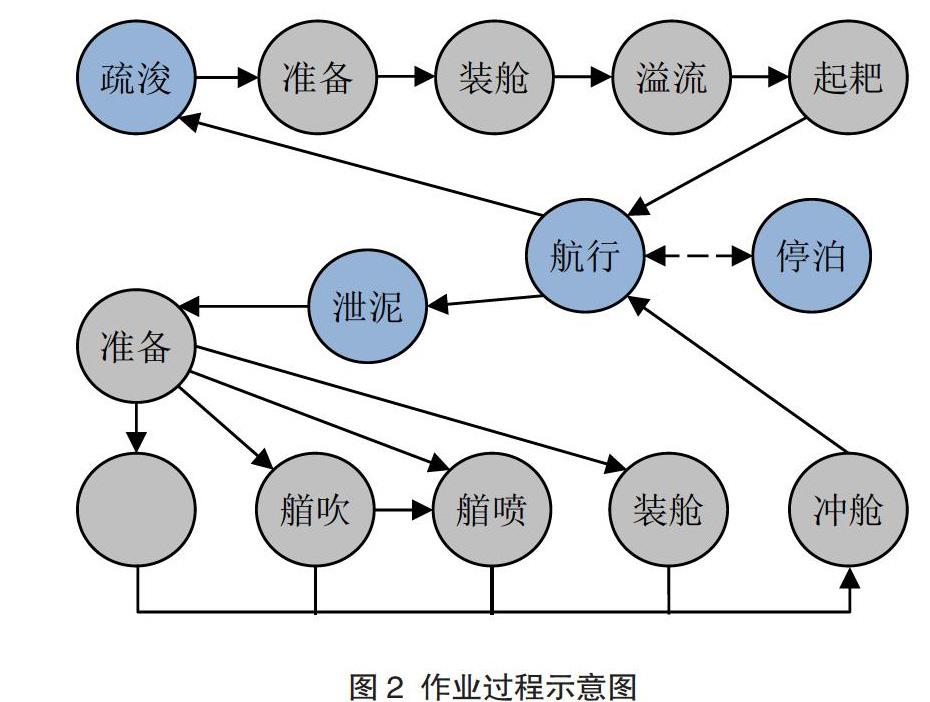
根据挖泥船作业的特征,在本系统中将船舶作业过程划分为航行、疏浚、卸泥、停泊4大阶段,每个阶段包含若干子阶段,如图2所示。
3.1.2控制过程安全保护及报警
基于疏浚作业阶段自动判断智能模型(DPADS),可实时建立APSS、ADSS、AJSS自动控制序列在执行过程中出现的故障与诊断界面之间的动态关联。一旦故障出现,可通过按下智能诊断按钮,控制界面自动跳转至相应的诊断界面,方便故障判断及协助维护。
3.1.3设备安全决策
包括:主机、泥泵、冲水泵、液压、吊架、绞车等重要设备工作特征的诊断。
3.1.4控制过程传感器安全决策
主要功能包括:传感器断电诊断、传感器进水诊断、传感器越界诊断、传感器线性故障诊断等。针对故障传感器进行判别标记,例如:闸阀、蝶阀限位条件标记(假开、假关);吊架限位条件标记(到位、未到位);各传感器故障标记等。
3.2 自动耙管(APSS)控制
自动耙管控制序列的智能APSS软控面板,设置6组模式按钮:“搁墩”控制耙管到达搁墩位置;“舷内”控制A字架到达弦内位置;“舷外”控制A字架到达弦外位置;“吸口”控制耙管到达吸口位置;“离地”控制耙头深度达到;“着地”控制耙头放置施工面。
3.2.1模式转换及控制
疏浚作业阶段自动判断智能模型(DPADS),建立了对应的条件预设,所有功能按钮将按照相应逻辑规则执行。
例如:A1搁墩模式按钮,可以把处于A2舷内、A3舷外、A4吸口等状态或处于过渡状态中的耙管一键控制至A1搁墩状态,通过DPADS中的逻辑规则对各动作条件判断(如液压系统是否满足等);状态条件判断(如搁墩限位,A子架限位等状态);各个绞车及A字架的连锁控制,从而实现模式转换。A1搁墩至A2舷内模式转换控制过程,见图3所示。
3.2.2主要安全决策
(1)动作时间保护及传感器失效报警
当转换过程所用的时间超过设定时间,系统将停止绞车及吊架动作及系统界面报警;当水下传感器出现进水、断线等故障时,将退出自动控制模式,同时系统界面报警。
(2)耙管垂直、水平角度保护
通过调整吊架推出、收进的速度和收放耙头、耙中绞车,使垂直和水平夹角保持在设定范围内;当角度不在设定范围内时,通过系统自动调节耙中、耙头绞车速度,使其在合理的范围内。
(3)最大安全角度及航速保护
在A5离地、A6着地模式下,垂直、水平角度不能大于最大安全范围角度,系统根据不同土质定义设定值。例如:当处于A6着地模式时,如果耙头在船首方向对地航速不在安全范围内,则自动控制耙头提升至A5离地模式。
3.3 自动疏浚(ADSS)控制
自动疏浚控制序列的智能ADSS软控面板,设置6个模式按钮:“航行”控制停泵及关闭所有闸阀;“挖泥”建立装舱管路并启动泥泵等相关设备;“旁通”建立旁通管路并启动泥泵等相关设备;“停泵”停止泥泵;“抽舱”建立抽舱管路并启动泥泵等相关设备进入抽舱作业;“压舱”建立压载管路并启动泥泵等相关设备进行快速装舱。
3.3.1状态判断及对应控制
通过疏浚作业阶段自动判断智能模型(DPADS)预设的状态,判断对应的启动条件。例如:挖泥、旁通、抽舱、压舱功能按钮的一键关联启动。激活按钮系统,会依次判断液压系统、冲洗泵是否运行。如果冲洗泵未运行,启动冲洗泵;如果对应设备运行正常,系统将闸阀预置到模式对应的管路;然后判断封水泵是否启动,如果启动,系统启动泥泵,系统动作完成;如果封水泵未启动,系统启动封水泵然后再启动泥泵,系统动作完成。其控制过程示意图,如图4所示。
例如:航行功能按钮的一键关联启动。激活按钮,首先系统依次判断液压系统是否启动?泥泵是否停止?如果不满足条件,系统将停止动作;如果满足条件,系统进行下一步判断冲洗泵是否启动;如果冲洗泵启动,关闭所有闸阀,动作完成;如果冲洗泵未启动,启动冲洗泵后关闭所有閘阀,动作完成。其控制过程示意图,如图5所示。
3.3.2主要安全决策
(1)动作时间保护和控制/启动失败报警
在控制模式执行过程中,由于人为或非可监测因素导致控制过程终止时,将在系统界面发出报警。例如:当动作过程闸阀预置时间超过设定时间,现场确认闸阀状态安全后,可通过系统界面对假开、假关状态进行一键确认。
(2)控制联锁保护
管路通路未建立时,泥泵不允许启动。如果在泥泵运行状态下,将禁止导致出现管路通路未建立的操作,以防止用户的误操作。如果由于机旁人为控制等特殊操作导致管路通路未建立,泥泵将停止,同时发出声光报警。如果由于闸阀限位故障,导致管路通路出现未建立的状态(非指令操作),则发出报警,同时界面将弹出提示确认窗口。
3.4 自动冲水(AJSS)控制
自动冲水控制序列的智能AJSS软控面板,设置4个模式按钮:“挖泥”建立耙头冲水管路并启动液压泵、冲水泵;“准备”建立耙头冲水管路并将冲水泵调至怠速;“航行”停止冲水泵并关闭所有蝶阀;“冲洗”建立泥舱冲洗管路并启动冲水泵。
3.4.1关联启动
通过疏浚作业阶段自动判断智能模型(DPADS)预设的状态,判断对应启动条件。例如:高压冲水的一键关联启动,激活对应耙头。首先,系统判断液压系统是否运行?如判断液压系统未运行,系统将停止动作;如正常运行系统通过对蝶阀控制建立耙头冲水管路,然后启动高压冲水泵并调制预设怠速,动作完成。其控制过程示意图,如图6所示。
3.4.2主要安全决策
(1)动作时间保护和控制/启动失败报警
在控制模式执行过程中,由于人为或非可监测因素导致控制过程终止时,将在系统界面(下转第页)(上接第页)
发出报警。以高压冲水泵的启动为例:当动作过程高压冲水泵启动超时设定时间后,系统界面输出高压冲水泵启动超时提示。
(2)控制联锁保护
管路通路未建立时,冲水泵不允许启动。例如:冲水泵运行状态下,将禁止导致出现管路通路未建立的操作,如果用户仍然发出错误的操作指令,则系统将发出报警提示;如果由于特殊操作导致管路通路未建立,冲水泵将停止,同时发出报警;如果由于蝶阀限位故障,导致管路通路出现未建立的状态(非指令操作),则发出声光报警,同时系统界面将弹出提示确认窗口。
4 实船应用及展望
2019年6月,在“浚海2”轮安装了该系统,12月完成了系统测试。在实船施工作业中,通过该系统的自动化程度和智能化水平有效降低了操耙员的工作难度,推进了生产操作的标准程度。
从市场推广角度来看,耙吸挖泥船疏浚设备操控智能化系统可与现有的耙吸挖泥船DCS系统进行无缝集成,便于在公司现有的耙吸挖泥船集成控制系统的基础上进行安装部署,开展推广应用,快速实现公司现有耙吸挖泥船的自动化、智能化升级改造,提升疏浚工艺决策的智能化水平,为后期基于大数据的工艺分析、信息挖掘、智能疏浚提供基础。疏浚设备操控及工艺决策智能化研究,对于耙吸挖泥船的新造船的应用示范、旧船的升级改造具有广泛的推广价值。
