KGDB:统一模型和语言的知识图谱数据库管理系统∗
2021-05-23刘宝珠柳鹏凯李思卓张小旺杨雅君
刘宝珠 ,王 鑫,柳鹏凯,李思卓,张小旺,杨雅君
1(天津大学 智能与计算学部,天津 300354)
2(天津市认知计算与应用重点实验室,天津 300354)
知识图谱是人工智能的重要基石,是新一代人工智能由感知走向认知的重要基础设施[1].RDF 图和属性图是知识图谱的两个主流数据模型.一方面,资源描述框架(resource description framework,简称RDF)成为国际万维网联盟(W3C)表示知识图谱的推荐标准,被以gStore[2]为代表的三元组数据库广泛采用;另一方面,属性图被以Neo4j[3],Dgraph[4]和HugeGraph[5]等为代表的图数据库广泛采用为底层数据模型.
关系数据库数十年来的发展,证实了统一的数据模型和查询语言是数据管理技术发展的关键.目前,知识图谱数据库管理的问题是数据模型、存储方案和查询语言不统一.为此,我们研发了统一模型和语言的知识图谱数据库管理系统——KGDB(knowledge graph database)
KGDB 使用统一的存储方案,可以支持存储RDF 图和属性图两种不同的数据模型;根据实体的类型进行分块存储,同时运用基于特征集的聚类方法处理无类型实体,使之可以归入某一语义相近的类型;分别提供RDF 图和属性图上的查询接口,可以使用SPARQL 和Cypher 查询语言对同一知识图谱进行操作,即允许两种查询语言的互操作.KGDB 遵循“统一存储”-“兼容语法”-“统一语义”的技术路线:在底层存储,使用相同的存储方案处理不同的知识图谱数据模型;在查询表达上,兼容两种面向不同知识图谱数据模型的语法完全不同的查询语言;而在查询处理上,将两种语法不同的查询语言对齐到统一的语义,进而使用相同的查询处理方法.
KGDB 的总体架构如图1 所示,采用自底向上的系统构建方法.
(1)在用户输入层,用户可输入RDF 图数据或者属性图数据;
(2)在系统处理阶段,分为两部分:①经过存储关系转化,依据存储方案将数据转化为以类型聚类的关系表,将原始的知识图谱数据进行基于关系的存储;②查询处理部分,可以允许用户使用两种查询语言对同一知识图谱进行操作;
(3)在用户界面层,用户可以查看规范格式的图模式查询的结果.
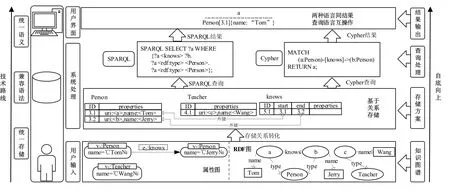
Fig.1 Architecture of KGDB图1 KGDB 总体架构图
现有的知识图谱数据库管理系统因其面向的数据模型的不同,提出了不同的存储方法.对于RDF 图的存储,可以分为三大类:(1)直接利用RDF 三元组的特性进行存储,例如三元组表(triple table)、水平表(horizontal table)等;(2)根据 RDF 图数据展现的数据类型特征进行存储,例如属性表(property table)、垂直划分(vertical partitioning)[6]、六重索引(sextuple indexing)和DB2RDF[7]等;(3)依据RDF 图数据的语义信息进行归类存储,例如特征集方法(characteristic sets)[8]、扩展的特征集方法(extended characteristic sets)[9]和R-Type[10]等.对于属性图的存储,一般采用生存储方案,例如Neo4j,JanusGraph[11],TigerGraph[12]等.
知识图谱三元组数据与关系数据的最大不同是其模式的灵活性,这给传统的存储和查询处理提出了新问题.为此,提出了一种基于特征集聚类的处理方法,根据实体的谓语组进行类型聚类,并将无类型实体数据依据其关系特征,归入某类型中,从而解决知识图谱的统一存储问题.
在查询语言方面,现有的知识图谱数据库管理系统因面向的数据模型不同,使用不同的查询语言进行查询处理:SPARQL 是RDF 图上的查询语言,Cypher 是属性图上的主要查询语言.两种查询语言具有不同的语法,阻碍了在统一存储方案上的查询互操作.为此,进行SPARQL 和Cypher 语言的语义对齐,使之可以操作同一个知识图谱,而无需区别知识图谱的数据模型.
真实数据集和合成数据集上的大量实验表明:KGDB 能够高效地进行知识图谱数据的存储管理和查询处理,优于现有RDF 数据库gStore 和属性图数据库Neo4j.
本文的主要贡献如下:
(1)以关系模型为基础,提出统一的知识图谱存储方案,根据数据的类型进行聚类,支持两种知识图谱主流数据模型(RDF 图和属性图)的高效存储;使用字典编码方法减少数据的存储空间,满足知识图谱数据的存储和查询负载需求;
(2)使用基于特征集的聚类方法,将无类型实体归入谓语组相似的数据类型中,解决无类型实体数据的存储问题,使统一存储模型能够应对灵活多变的半结构化数据;
(3)兼容RDF 图数据模型的查询语言SPARQL 和属性图数据模型的主流查询语言Cypher 的查询语法,进行两种查询语言的语义对齐,实现两种查询语言的互操作,可使用两种语言操作同一个知识图谱;
(4)在合成数据集和真实数据集上进行大量实验,分别与现有的RDF 图数据管理系统和属性图数据管理系统进行对比实验,实验结果验证了KGDB 统一的存储方案和统一语义的查询处理的有效及高效性.
本文第1 节介绍相关工作.第2 节介绍预备知识.第3 节描述KGDB 使用的统一RDF 图和属性图的存储模型.第4 节阐述查询语言互操作的方法.第5 节在真实数据集和合成数据集上进行实验.第6 节对全文总结.
1 相关工作
随着知识图谱的发展,各种知识图谱存储方案和查询处理方法不断涌现,本节将分别介绍两种知识图谱数据模型的现有存储方案及查询方法.知识图谱数据规模的不断增长,对存储和查询提出更高要求,分布式知识图谱管理系统成为研究热点之一[13,14].
1.1 知识图谱存储方案
1.1.1 RDF 图数据存储
(1)直接利用RDF 三元组特性
三元组表(triple table)将数据对应存储到一个3 列结构的表中,采用三元组表存储方案的代表是3store[15].水平表(horizontal table)在每一行存储一个主语的所有谓语及对应的宾语,DLDB[16]系统采用了水平表存储方案.属性表(property table)将同类的主语在一个表中存储,Jena[17]采用了属性表存储方案.垂直划分(vertical partitioning)[6]对每一个谓语建立一个两列的表,存储该谓语连接的主语和相应的宾语.采用垂直划分存储方案的系统有SW-Store[18],TripleBit[19].六重索引(sextuple indexing)应用“空间换时间”策略,存储三元组的全部6 种排列,并在首列上建立索引.使用六重索引的系统有RDF-3X[20]和Hexastore[21].DB2RDF[7]存储方案不将表的列与某一谓语绑定,而是通过哈希的方式进行动态映射,并确保将相同谓语映射到同一列上,并通过额外的表处理多值谓语的问题.IBM DB2 数据库系统采用了DB2RDF 存储方案.
直接利用RDF 三元组特性的存储方案最直观简单,但是存在着诸如稀疏性、空值等空间利用的问题.同一主语对应的谓语可能会有很多,不同主语之间关联的谓语差异远高于预期,即使同一类型的主语其谓语差异也不容忽视,这类存储方案建立的关系表会有很多位置存为空值,稀疏的关系表严重降低存储性能.
(2)依据RDF 数据语义信息
特征集(characteristic sets,简称CS)[8]存储方法将RDF 数据按照星型结构进行划分,具有相同谓语组的实体将会作为同一类型对待,大大减少了需要建立的表的数量.然而,特征集方法等同地对待所有谓语,很有可能导致大多数实体落入同一集合,不能很好地达到划分目的.RDF-3X 系统实现了特征集方法[20].扩展的特征集(extended characteristic sets,简称ECS)[9]方法实施多层次的星型结构划分,形成二级索引,加速查询.但是,扩展的特征集方法也不能避免大多数实体落入同一集合的问题.R-Type[10]方法引入了本体规则,将谓语分为领域可推定的和非领域可推定的,并将包含领域可推定谓语的星型团结构中指定类型的三元组省略,不进行物理化存储,节省存储空间.在查询过程中,包含领域可推定的星型结构可以直接映射到正确的团结构上,从而加速查询.但R-Type 没有对无类型实体提出划分方法.SemStorm[22]系统采用了R-Type 方法.
依据RDF 数据语义信息的存储方案虽然更加精确,能够利用语义信息优化存储,但是目前没有见到基于关系的存储方案,且大多数方案仅有原型系统,成熟度不足.关系数据库发展至今,在事务管理、可扩展性等方面的研究基础相对稳固,基于关系的存储方案可以获得更多的支持.
1.1.2 属性图数据存储
(1)基于关系的存储方案
SQLGraph[23]使用一种在关系数据库中利用关系和JSON 键值存储属性图的方案,将每个边标签散列到两列,将边的邻接列表存储在关系表中,其中一列存储边标签,而另一列存储值.AgensGraph[24]是一种底层基于关系模型的多模型图数据库,将属性图中的点和边根据标签分开存储到关系表中,并将点、边的属性值信息以JSON 格式进行记录.
因属性图的半结构化数据特征,上述基于关系的属性图存储方案的灵活度不能完全满足属性图的存储要求,关系表一旦建立,修改其结构的代价巨大.而对于如今知识图谱高达数十亿点边结构的数据规模,需要更加灵活的方案来提高其存储效率.
(2)基于文档的存储方案
MongoDB[25]是一种基于文档存储的数据库系统,旨在为Web 应用提供可扩展的高性能数据存储解决方案,将数据存储为一个文档.数据结构由键值对组成,其文档类似于JSON 对象,字段值可以进行嵌套.Neo4j[3]将所有数据存储在节点和关系中,不需要任何额外的关系数据库或NoSQL 数据库来存储数据,以图的原生形式存储属性图数据并应对各种查询需求.
重庆市民政机关在制度建设、组织保障、人才培养和资金支持等方面大力推动婚姻家庭社会工作标准化的实施和发展。为了更好地解决居民需求,提高服务质量和水平,形成标准服务流程和体系,重庆市婚姻收养登记管理中心(以下简称“重庆市婚管中心”)对居民婚姻家庭进行了多次需求摸底调查,发现居民对婚姻家庭方面的需求主要集中在子女教育、婚姻家庭法律法规知识、结婚及生育法定程序、优生优育、夫妻相处技巧和家庭理财知识等方面(具体情况见图4)。
基于文档的属性图存储方案常被应用在分布式环境下,而相对于单机环境,分布式对数据的存储提出了更高的要求,而使用文件进行大规模数据的存储效率不足以满足数据规模日益增长的属性图的存储和查询要求.目前,知识图谱的存储方案基本都面向某一种类型的知识图谱并且成熟度不足.为此,有必要面向知识图谱的两种主流数据模型开发统一的、基于关系的高效存储方案.
1.2 知识图谱查询处理
1.2.1 RDF 图数据查询
Blazegraph[26]是一个基于RDF 三元组库的图数据库管理系统,其内部实现技术是面向RDF 三元组和SPARQL 查询语言的.Jena[17]是语义Web 领域主要的开源框架和RDF 三元组库,较好地遵循了W3C 标准,支持SPARQL 查询处理,具有一套基于规则的推理引擎,用以执行RDFS 和OWL 本体推理任务.gStore[2]使用RDF 图对应的签章图并建立VS 树索引,支持SPARQL 查询处理.Virtuoso[27]是支持多种数据模型的混合数据库管理系统,可以较为完善地支持W3C 的Linked Data 系列协议.RDF4J[28]前身是Aduna 公司开发的Sesame 框架,支持SPARQL 1.1 的查询和更新语言,能够进行RDF 数据的解析、存储、推理和查询.RDF-3X[29]为RDF 数据专门设计了压缩物理存储方案、查询处理和查询优化技术.AllegroGraph[30]系统对语义推理功能具有较为完善的支持.GraphDB[31]实现了RDF4J 框架的SAIL 层,使用内置的基于规则的“前向链(forward-chaining)”推理机,对RDF推理功能拥有良好的支持.
1.2.2 属性图数据查询
Neo4j[3]是目前流行程度最高的图数据库产品,基于属性图模型,支持Cypher 查询语言.AgensGraph[24]基于关系模型存储属性图,在PostgreSQL 内核之上构建Cypher 语言的处理层.JanusGraph[11]是开源分布式图数据库,存储后端与查询引擎分离,具备基于MapReduce 的图分析引擎,可将Gremlin[32]导航查询转化为MapReduce 任务.OrientDB[33]主要面向图和文档数据存储管理的需求设计,支持扩展的SQL 和Gremlin 用于图上的导航式查询,支持类似Cypher 语言查询模式的MATCH 语句.Cypher for Apache Spark[34]提供基于Spark 框架的Cypher引擎.
目前,两种知识图谱数据模型拥有各自的查询语言、语法和语义,虽然在具体的系统上分别进行了优化设计,但不利于知识图谱查询的多样性,故亟需研发一种既支持SPARQL 又支持Cypher、具有语义互操作能力的系统.
2 预备知识
本节将详细介绍相关背景知识,包括RDF 图和属性图的定义.表1 给出了本文使用的主要符号及其含义.
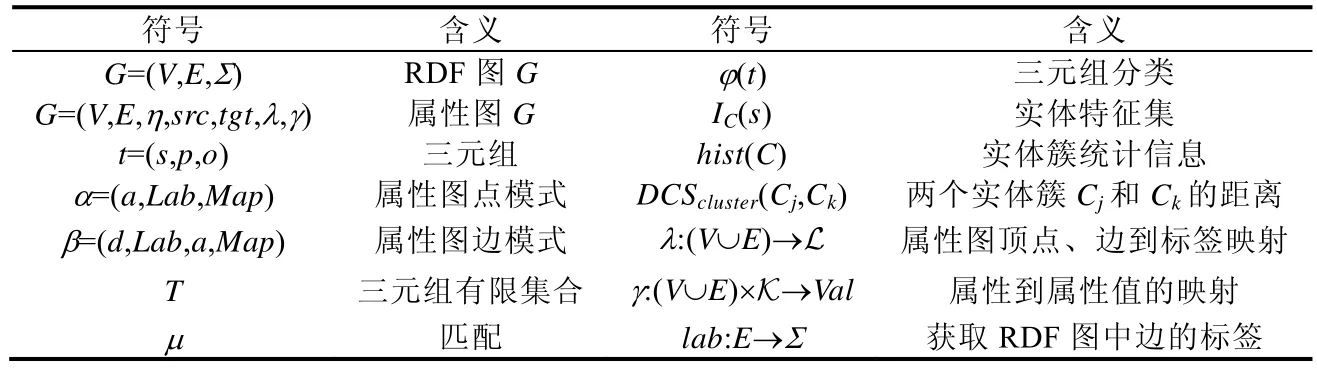
Table 1 List of notations表1 符号列表
定义1(RDF 图).设U是统一资源标识符的有限集合,L是字面量的有限集合,B是空结点的有限集合.元组t=(s,p,o)∈U×U×(U∪L∪B)称为RDF 三元组(在本文中不考虑实体为空结点的情况),三元组t=(s,p,o)表示资源s和资源o有关系p,或者资源s的属性p的值为o.其中,s,p和o分别表示主语、谓语和宾语.RDF 图G是三元组t的有限集合.用V,E,Σ分别表示RDF 图G的顶点、边和标签的集合.正式定义为:V={s|(s,p,o)∈G}∪{o|(s,p,o)∈G},E⊆V×V且Σ={p|(s,p,o)∈G}.函数lab:E→Σ返回图G中边的标签.
例1:图2 所示的RDF 图示例描述了一个音乐知识图谱,包括作曲家(Composer)Beethoven、钢琴演奏家(Pianist)Lang Lang 和音乐(Music)Fate Symphony 等资源,这些资源上的若干属性以及资源之间的作曲(composes)和演奏(plays)联系.在RDF 图示例中.使用椭圆表示资源,矩形表示字面量,连接顶点之间的有向线段表示顶点之间的关系,起点是主语,边标签是谓语,终点是宾语.RDF 内置谓语rdf:type 指定资源所属类型,如三元组(Beethoven,rdf:type,Composer)表示Beethoven 的类型是作曲家.
定义2(属性图).属性图G=(V,E,η,src,tgt,λ,γ),其中:V表示顶点有限集合;E表示边的有限集合且V∩E=∅;函数η:E→(V×V)表示边到顶点对的映射,如η(e)=(v1,v2)表示顶点v1与顶点v2之间存在一条有向边e;函数src:E→V表示边到起始顶点的映射,例如src(e)=v表示边e的起始顶点为v;函数tgt:E→V表示边到终结顶点的映射,例如tgt(e)=v表示边e的终结顶点为v;函数λ:(V∪E)→L为顶点或边与标签的映射(其中,L表示标签集合),如v∈V(或e∈E)且λ(v)=l(或λ(e)=l),则l为顶点v(或边e)的标签;函数γ:(V∪E)×K→Val(其中,K为属性集合,Val是值的集合)表示顶点或边的关联属性,如v∈V(或e∈E),property∈K且γ(v,property)=val(或γ(e,property)=val)表示顶点v(或边e)上属性property的值为val.
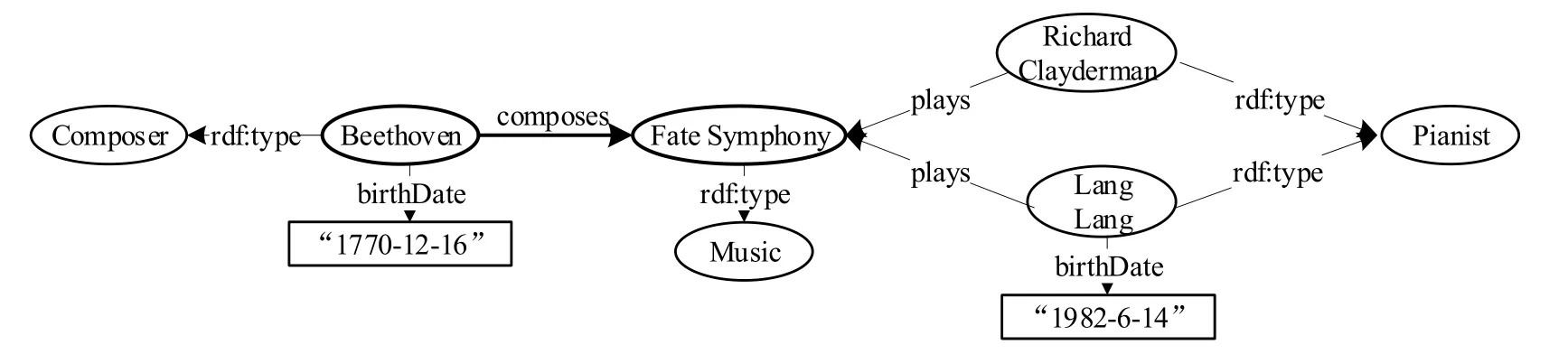
Fig.2 An RDF graph example图2 RDF 图示例
例2:图3 给出了图2 中音乐知识图谱的属性图示例.属性图中每个顶点和边都具有唯一id(如顶点v1、边e1),顶点和边均可具有标签(如顶点v1上的标签Composer),顶点和边上均可具有属性,每个属性由属性名和属性值的键值对组成(如顶点v1上的属性name=“Beethoven”).
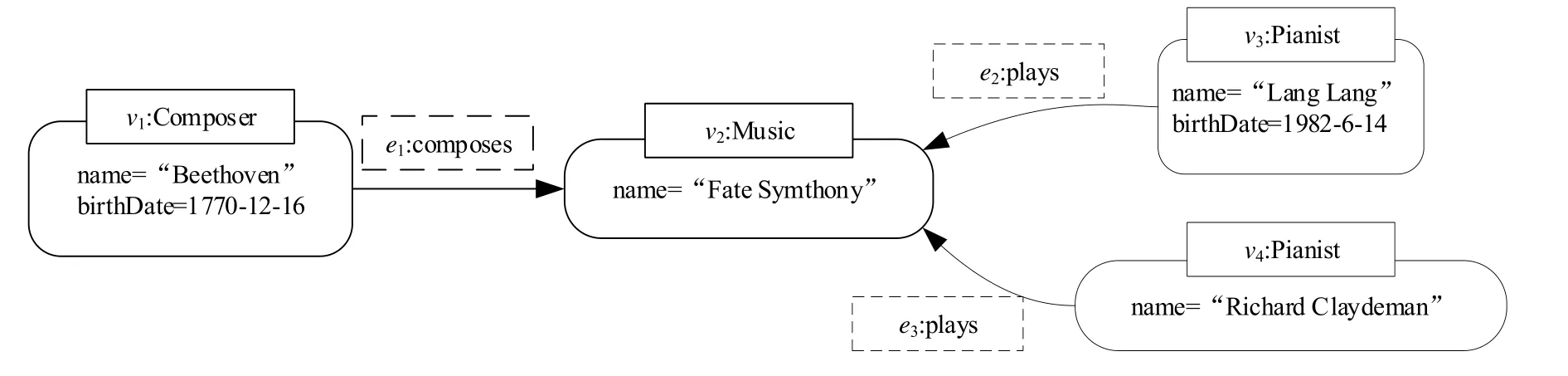
Fig.3 A property graph example图3 属性图示例
3 知识图谱存储方案
本节主要介绍统一的知识图谱存储方案,此方案基于关系模型实现对RDF 图和属性图的兼容表示.之后,根据所提出的存储方案,采用基于特征集的聚类算法处理无类型数据,以更好地支持知识图谱数据存储..
3.1 知识图谱存储模型
统一存储方案按照实体的类型将其存储到对应顶点类型表vn中(n∈[1,i]),按照关系的类型将其存储到对应边类型表em(m∈[1,j])中,其中,i,j分别表示顶点和边类型的数量.不同的关系表以实体或关系的类型来命名.用于存储实体的关系表包含2 列,分别存储实体的唯一标识id(主键)和实体所拥有的属性property(由属性名和属性值的键值对所构成).用于存储实体间关系的关系表包含4 列,分别存储边的唯一标识id(主键)、边的起始顶点标识start、终结顶点标识end 以及边所拥有的属性property(由属性名和属性值的键值对所构成).顶点类型表和边类型表根据知识图谱数据中实体和关系的类型进行进一步地划分,同类型的顶点或者边存储在同一个关系表中,这样避免了因单个关系表数据量过大而导致的数据访问性能较低的问题.
3.1.1 RDF 图到统一存储模型的映射
RDF 图数据中有3 种不同类型的三元组,下面给出三元组分类的定义.
定义3(三元组分类).令C={mem,prop,edge}表示三元组的类别,分别指类型成员三元组、属性描述三元组和动作三元组.函数ϕ:T→C是三元组到三元组类别的映射:

根据定义3 以及例1 和例2,将图2 和图3 中的事实以三元组的形式表示,并应用三元组分类方法,可知ϕ((Beethoven,rdf:type,Composer))=mem,ϕ((Beethoven,birthDate,1770-12-16))=prop且ϕ((Lang Lang,plays,Fate Symphony))=edge.
对于RDF 三元组t=(s,p,o),需要根据RDF 图G中顶点标签和边标签创建相应的顶点类型表和边类型表.根据三元组的不同形式,使用下面的转换规则将其分别进行映射,将不同的实体和关系存储到相应的顶点类型表和边类型表中.
规则1.对于任意三元组t=(s,p,o),若ϕ(t)=mem,则将id 为s的元组插入到表名为o的顶点类型表中.
规则2.对于任意三元组t=(s,p,o),若ϕ(t)=prop,则将p,o以键值对的形式插入到顶点类型表中实体s对应的property 列中.
规则3.对于任意三元组t=(s,p,o),若ϕ(t)=edge,则在表名为p的边类型表中插入一条start 为s、end 为o的记录.
3.1.2 属性图到统一存储模型的映射
属性图因其对顶点和边上的属性提供内置的支持,在将其映射到统一存储模型时相对容易,应用下列规则将属性图数据映射到统一存储模型上.
规则4.对于属性图数据中的实体,根据其顶点标签λ(v),为实体v赋唯一的数值id 并插入到顶点类型表λ(v)的id 列,同时将其属性property和属性值γ(v,property)的键值对插入到property 列中.
规则5.对于属性图数据中的关系,根据其边标签λ(e),为关系e赋唯一的数值id 并插入到边类型表λ(e)的id 列中,同时将其属性property和属性值γ(e,property)的键值对插入到property 列中,将顶点v1的id 插入到start列中,将顶点v2的id 插入到end 列中(其中,η(e)=(v1,v2)∧src(e)=v1∧tgt(e)=v2).
在属性图中,顶点关系表中的id 值仅起到标识作用,而不具有实际意义;而RDF 图中id 表示对应实体的URI,具有实际意义.为了进行统一的表示,将实体v的URI 值vuri作为一个新的属性,添加到结点关系表中的property 列中,即添加γ(v,uri)=vuri.
例3:根据上述的存储方案,将图2、图3 介绍的音乐知识图谱示例进行相应转换,得到图4 基于关系的统一知识图谱存储方案.不同的实体按照其类型(作曲家、钢琴家、音乐)存储到顶点类型表中,不同的关系按照类型(作曲、演奏)存储到关系类型表中.图中箭头表示外键关系.
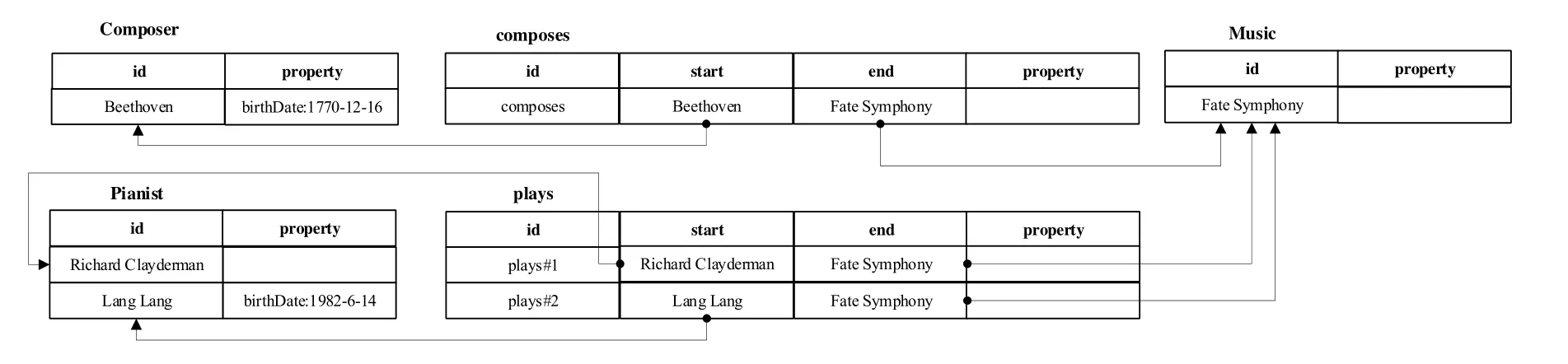
Fig.4 Unified storage scheme for knowledge graph图4 知识图谱统一存储方案
知识图谱数据根据所提出的统一存储方案,依据实体和关系的类型进行分别存储.在示例的知识图谱中未给出边属性,因此边表中的property 列为空值.属性图和RDF 图对实体或者关系的类型信息均提供了内置的支持,属性图由标签指定,RDF 图由内置的rdf:type 指定.这种根据类型对顶点和边进行划分并进行分别存储管理的方式是相对合理的,能够在一定程度上解决现有知识图谱存储方案中存在的数据冗余与数据稀疏问题.
在建立关系表之后,各种操作都将以关系表名为基本对象,给出操作关系表的函数:存储模型建立的关系表集合是R={r1,r2,…,rn},对应的关系表的表名集合是X={x1,x2,…,xm};函数name:R→X返回某个关系表的表名;函数rel:T→R返回某个实体t所在的关系表,其中,T为实体集合且t∈T.
在知识图谱中,两节点之间有可能存在多种谓语关系,即多重属性.对于多重属性的存储问题,KGDB 使用第3.1 节中介绍的方法,针对单个主语实体,存储多个属性键值对,其中,属性键对应不同的谓语关系,属性值对应同一个实体.大多数现有的知识图谱数据存储方案使用字典编码的方法,将URI 或者字面量映射到整数标识符,即id.映射表有效地实现了字符串到id 之间的转换,并将数据库的空间开销降至最低.KGDB 采用了与大多数现有知识图谱存储方案类似的字典编码方法,压缩存储方案所需的空间资源.
3.2 无类型实体存储优化方案
上一节介绍的统一存储模型中,利用顶点和边的类型对知识图谱数据进行划分,并存储到相应的顶点表和边表中.但此方案并没有考虑无类型的实体的存储.对于无类型的实体,基本的存储方案将所有无类型的实体等同对待,所有无类型的实体存储在一个关系表中.这种统一存储的方法,一方面在处理无类型实体数量较多的数据集时,将导致单个关系表过大,降低查询的效率;另一方面,无类型的实体之间并没有关联,无语义信息,这与将相同或靠近语义的实体存储在相近空间的初衷相悖.
对于未指定类型的实体,基于特征集的聚类算法,将其划分到一个最相近的给定类别中.层次聚类算法可以根据某种距离函数给出结点之间的相似性,并按照相似度逐步将结点进行合并,当达到某一条件时,合并终止.在本节中,将给出实体的特征集、特征集的距离等定义,用于测定实体之间的相似性,从而解决无法对无类型实体进行存储的问题.
3.2.1 实体特征集
RDF 图中使用多个三元组来描述一个实体所拥有的特征.实体的特征集[8]可定义为RDF 图中表示该实体的顶点所发出的边的名称的集合.下面给出实体特征集的形式化定义.
定义4(实体特征集).对于每个出现在知识图谱数据集D中的实体s,定义其特征集I如下:

例4:在某个RDF 数据集中,描述《老人与海》这本书的实体s1共使用了3 个三元组,分别为(s1,title,“The Old Man and the Sea”),(s1,author,Hemingway)以及(s1,year,“1951”),则s1的特征集是IC(s1)={title,author,year}.
3.2.2 实体簇及其距离定义
实体簇C中包含多个实体,为了更好地表示一个簇中所包含实体的属性的特征,对任意一个包含若干个实体的簇C,定义hist(C)来表示簇中实体的特征集的统计信息,记录簇中包含的全部实体所拥有的属性的个数为m,则hist(C)可以定义为每个属性与它出现次数的键值对的集合:

其中,propertyi表示第i个属性,counti表示第i个属性在簇C中出现的次数.进而可以通过这一统计信息定义两个包含若干实体的簇的距离:对于两个簇Cj和Ck,它们之间的距离可以表示为其实体统计信息之间的距离,即:

其中,
•n是两个簇中所含不同属性的总个数;
•bi表示第i个属性是否同时出现在两个簇中:若是,则为0;否则为1;
•count(Cj,pi)和count(Ck,pi)分别表示在簇Cj和Ck中,第i个属性pi对应的个数.
根据公式(4),两个簇之间的距离等于不同时出现在两个簇中的属性所对应的出现次数之和.属性的出现次数可以说明该属性对簇的重要程度,如对于书籍类型的实体来说,其所在的簇中作者和标题属性所对应的数值较高.以属性次数的加和作为簇间距离,可以衡量两个簇之间的相似程度.
3.2.3 基于特征集的实体聚类算法
基于实体特征集、包含多个实体的簇的特征集统计信息以及簇间距离的定义,可以对基本的统一存储方案进行优化.基于层次聚类算法,提出一种基于实体类型的实体聚类算法,将未给定类型的实体通过聚类的方法划分到一个已知的类型中.
对于实体s∈S,其中,S为实体集合,函数haveType:S→{TRUE,FALSE},返回实体的有无类型情况:若s为有类型实体,则返回真;否则返回假.函数getType:S→TYPE返回某个实体的类型信息,其中,TYPE为实体类型集合.
为了将两个实体簇进行合并,需要计算两个实体簇之间的距离,并找到距离最相近的两个实体簇进行合并.下面给出寻找距离最近实体簇下标的函数:对于实体簇集合C={C1,C2,…,Cn},函数findMin(C)两两计算实体簇间距离,并给出距离最近的两个不同实体簇的下标.
在聚类的过程中,将每个实体作为一个单独的簇,并根据实体的特征集的相似程度自底向上进行簇的合并操作.合并过程中,需要保证不对两个包含不同类型实体的簇进行合并.
算法1 给出了基于特征集的实体聚类算法,根据实体的特征集进行层次聚类,可以将实体按照所拥有的特征划分到不同的簇中,每个簇内的实体属性相似,即每个簇内的实体趋近于拥有相同的类型.算法首先将实体类型相同的实体合并到一个簇中,将每个未指定类型的实体各自作为一个单独的簇(第2 行~第8 行),根据簇间的距离DCScluster进行自底向上地合并,在已知的实体簇集合C中找到簇间距离最小的两个簇Ci和Cj,即令DCScluster(Ci,Cj)的值最小,且要求这两个簇不都为已经给定类型的实体簇(第10 行~第12 行),合并两个簇,并将合并后的簇的类型指定为其中已知类型的簇的类型Ci,同时更新合并后的簇的统计信息hist(Ci)(第14 行、第15行).重复合并簇的操作,直到没有符合条件的两个簇为止.经过实体聚类,包含未指定类型实体的簇将被合并到包含指定类型的实体的簇中,且每个簇中的实体的类型相同.
算法1.三元组无类型实体聚类.
输入:实体集合S;
输出:实体簇集合C.

例5:下面通过一个例子对聚类的过程进行说明.
在聚类开始时,rdf:type 为书籍的实体有s1和s2,合并到簇C1中,其中,
•IC(s1)={title,author,year};
•IC(s2)={author,year};
•hist(C1)={(title,1),(author,2),(year,2)}.
已知rdf:type 为电影的实体有s3和s4,合并到簇C2中,其中,
•IC(s3)={title,director,year};
•IC(s4)={director,year};
•hist(C2)={(title,1),(director,2),(year,2)}.
最后,没有rdf:type 的实体s5作为一个簇C3:
•IC(s5)={title,director};
•hist(C3)={(director,1)}.
故簇C1和C3之间的距离DCScenter(C1,C3)=6,C2和C3之间的距离DCScenter(C2,C3)=3.
未指定类型的实体s5所在的簇C3与电影实体所在的簇C2之间的距离更近,因此将C3合并到C2中,即将实体s5根据所设计的存储方案存储到类型为“电影”的顶点表中.
定义5(最优实体簇集合).实体簇集合C满足:(1)集合中的所有实体簇都包含具有明确类型的实体,且两个实体簇不包含相同类型的实体;(2)集合中的所有实体的最近距离实体都在其所在的实体簇中.
下面给出算法1 的正确性证明及复杂度证明.
定理1.给定实体集合S,算法1 能够给出最优的实体簇集合C.
证明:算法1 首先将根据数据集中数据本身的特点进行数据类型归类:若实体s为有类型数据,则将其归入实体s对应类型τ的实体簇Cτ中,并将Cτ合并到实体簇集合C中;若实体s为无类型数据,则将其分别归入一个单独的用于处理无类型数据的实体簇C0中,在这一步中,能够确保定义5 中的第1 条要求,经过第一轮迭代,各个实体都将归并到某个实体簇中.在后续的迭代过程中,每轮迭代都将会两两计算实体簇C1和C2之间的距离DCScluster(C1,C2),并在所有的距离中找到距离最小的两个实体簇Ci和Cj,其中,要求i≠j.若找得到满足条件的两个实体簇,则进行这两个实体簇的合并;否则聚类过程结束.在首轮迭代之后的迭代,确保了定义5 中的第2 条要求.最终找到最优的实体簇集合C.证毕.□
算法1 的时间复杂度由两部分组成:(1)算法经过e次迭代;(2)在每次迭代中,需要两两对比实体簇距离,在最坏情况下,每个实体都是单独的实体簇,此时两两计算实体簇距离的复杂度为O(s2).因此,算法1 的时间复杂度为O(es2).
4 查询语言互操作
SPARQL 是RDF 图上的查询语言,Cypher 是属性图之上的主要查询语言.两种不同的查询语言在语法上有较大差异,KGDB 以第3 节所介绍的统一的存储方案为基础,建立在存储方案之上的查询过程,可以使用两种不同的查询语言查询同一个知识图谱,从而达到查询语言互操作的目的.在文献[35,36]给出了RDF 和Cypher 的形式语义,KGDB 系统将SPARQL 和Cypher 语言看作“统一查询语义”的两种不同“语法视图”,关系模型被作为物理存储模型,将RDF 图和属性图进行统一存储,同时对齐SPARQL 语言和Cypher 语言的查询语义.
知识图谱查询处理的最基本算子即是基本图模式匹配查询(basic graph pattern,简称BGP),这类查询可以看作子图匹配或者子图同构查询.已有的各种知识图谱查询语言均以子图匹配作为核心算子.虽然图数据上的子图匹配查询算法已有很多,但却缺少同时具备系统性和高效性的面向大规模知识图谱的子图匹配查询处理算法.KGDB 基于SPARQL 和Cypher 语言处理子图匹配查询,需要建立起两种语言的联系,将同样的查询意图转化为不同的两种查询表达式,同时保障两种查询语言处理结果的正确性与高效性.
在本节中将会用到关系代数中的几个经典算子,如ρ(重命名)、π(投影)、σ(选择)、⋈ (连接)、×(笛卡尔积)、∩(交)和∪(并)等.使用连接列表L表示抽象语义,L={r1,r2,…,rn},其中,r1,…,rn表示连接列表中的n个关系表.对关系表r,r→property表示关系表中所有元组属性property的值.
4.1 SPARQL查询处理
首先,给出RDF 图基本图模式匹配查询的形式化定义.
定义6(RDF 图基本图模式匹配).RDF 图G上的基本图模式查询Q的语义定义为:
(1)μ是从V(Q)中的顶点到V中顶点的映射;
(2)(G,μ)⊧Q当且仅当对任意(si,pi,oi)∈Q满足:i)si和oi可以分别匹配μ(si)和μ(oi);ii)(μ(si),μ(oi))∈E;iii)lab(μ(si),μ(oi))=pi;
(3)Ω(Q)是使(G,μ)⊧Q满足的μ的集合,也就是图G上基本图模式查询GQ的答案集合.
例6:图5 是一个RDF 基本图模式匹配查询,查询Q中共包含两条三元组t1=(Beethoven,composes,?music)和t2=(Beethoven,birthDate,“1770-12-16”).两条三元组构成一个简单的星型结构,它所要查询的是Beethoven 创作的所有作品.在图2 的RDF 图中执行这个查询,?music 匹配到Fate Symphony 上,作为一个变量,可以在查询的结果子句中要求将其输出.
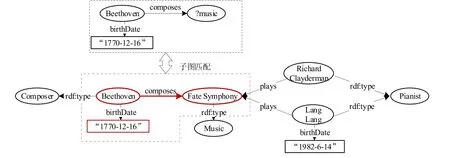
Fig.5 A basic graph pattern matching query example图5 基本图模式查询示例
最简单的SPARQL 查询语句包括两个部分:SELECT 关键字引导的结果子句和WHERE 关键字引导的约束子句.KGDB 根据SPARQL 查询语句的语法进行语义解析,生成语义树.根据SPARQL 查询语句中每部分的语义,使用下面的转换规则自底向上构建关系代数形式的查询语义树.
规则6.对于出现在SPARQL 查询约束子句中的任意三元组t=(s,p,o),若ϕ(ti)=mem,则在语义树的底层添加一个叶子结点rs=ρs(r),其中,name(r)=o.即,把关系rs添加到连接列表L中.
规则7.对于出现在SPARQL 查询约束子句中的任意三元组t=(s,p,o),若ϕ(t)=prop,已知rs∈L,则将L中的rs更改为原rs与属性约束σr→p=o(r)(其中,rel(s)=r)的交.
规则8.对于出现在SPARQL 查询约束子句中的任意三元组t=(s,p,o),若ϕ(t)=edge,若rs∈L,则将L中的rs更改为施加连接约束后的rs;若ro∈L,则将L中的ro更改为施加连接约束后的ro.对于主语(宾语)为URI 的情况,对谓语对应的关系表rp施加选择约束
规则9.对于出现在SPARQL 查询结果语句中的任意变量var,添加投影约束:πvar.id,var.property(rfinal),其中,rfinal为连接列表L中的所有关系进行笛卡尔积后得到的最终关系结果.
对应的,SPARQL 语句到查询语义的转化算法如下.
算法2.SPARQL 基本图模式匹配查询处理.
输出:图模式匹配查询的结果关系rresult.

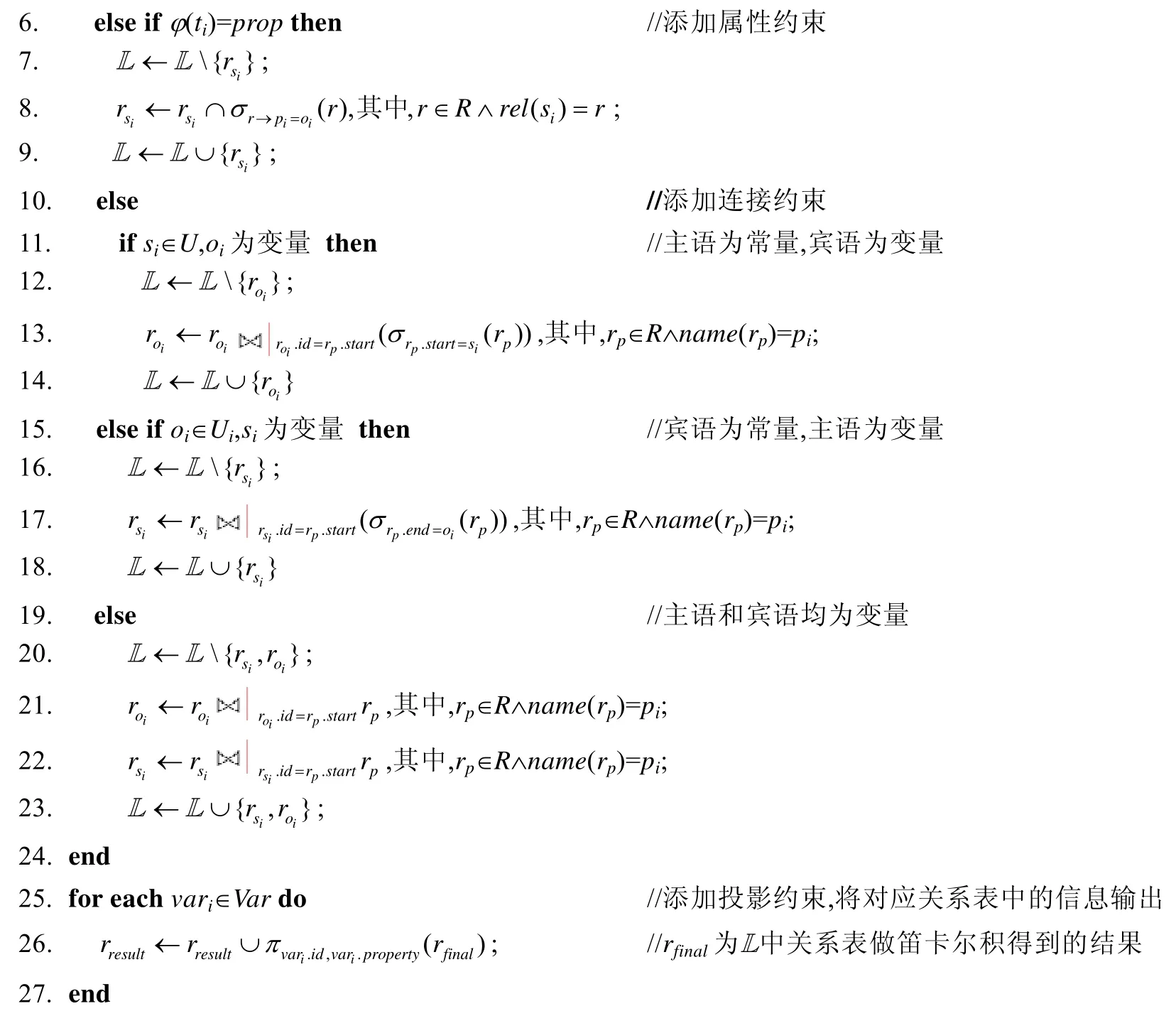
算法2 遍历SPARQL 查询中涉及的三元组,针对不同类型的三元组做出不同的应对措施,最终形成关系代数表示的查询语义.与存储方案相似,查询处理也将三元组ti=(si,pi,oi)分为3 种类型:表明实体类型的ϕ(ti)=mem、宾语部分为字面量的ϕ(ti)=prop和其他形式(ϕ(ti)=edge)的三元组.当处理mem类型的三元组时(第4 行、第5 行),在连接列表中添加表名为该条三元组宾语oi的关系表,并将这个关系表重命名为该条三元组的主语si(在SPARQL 查询中,这种mem类型的三元组的主语部分通常是变量,且在同一条查询中的其他的三元组中使用相同的变量代称);当处理prop类型的三元组时(第6 行~第9 行),向约束集合中添加一条属性约束;当处理其他类型的三元组(第10 行~第24 行),即edge类型的三元组时,添加连接约束.第25 行、第26 行处理所有投影约束,将用户要求的查询结果进行最终输出.
定理2.给定SPARQL 查询中三元组集合T和关系表集合R,算法2 输出的结果是正确的.
证明:算法2 遍历SPARQL 查询中涉及的所有三元组,并根据每条三元组ti=(si,pi,oi)∈T的三元组类别,给出对应的方案.参见定义3 可知,三元组的语义类型仅有3 种,即算法2 对于所有语义的三元组,均可以找到对应的解决方案,即给出正确的关系表的连接列表L.另一方面,结果子句中出现的所有变量,都在约束子句中出现,添加投影约束仅改变最终输出结果,不影响算法的正确性.证毕.□
算法2 的时间复杂度由两部分组成:(1)为了生成关系表的连接列表L,算法2 需要遍历SPARQL 查询中所有三元组,并对应给出解决方案,其时间复杂度为O(n);(2)向关系表的连接列表L添加新的条目的时间复杂度是常数的,即O(k).因此,算法2 的时间复杂度为O(kn).
4.2 Cypher查询处理
与SPARQL 查询处理类似,首先给出属性图上的模式匹配查询的形式化定义.
定义7(属性图模式).α=(a,Lab,Map)为一个点模式,其中:a∈A∪{nil}为点模式可选的名字,A为名字的集合,nil为空;Lab为可空的点的有限标签集合,且Lab⊆L,L为属性图的标签集合;Map为可空的属性集合K到属性值Val的映射.β=(d,Lab,a,Map)为一个边模式,其中,d∈{←,→}表示边模式的方向;Lab为可空的边的有限标签集合,且Lab⊆L;a∈A∪{nil}为边模式可选的名字;Map为可空的属性集合K到属性值Val的映射.ω=α1β1α2β2…βn−1αn为一个路径模式,其中,αi为点模式,βi为边模式.
定义8(属性图模式匹配).属性图上的图模式匹配可以递归定义如下[36].
(1)对点模式α=(a,Lab,Map),其在属性图G上的模式匹配为(v,G,μ)⊧α,则满足a为nil或者μ(a)=v,Lab⊆λ(v)且[[γ(v,k)=Map(k)]]G,μ成立;
(2)对于长度为m=0,即只包含一个点的路径P,在属性图G上的模式匹配为(v⋅P,G,μ)⊧αβω,则满足:
a)a为nil或者μ(a)=list(⋅);
b)(v,G,μ)⊧α并且(P,G,μ)⊧ω;
(3)对于长度为m≥1 的路径P,在属性图G上的模式匹配为(v1e1v2…emvm+1⋅P,G,μ)⊧αβω,则满足下列条件:
a)a为nil或者μ(a)=list(e1,…,em);
b)(v1,G,μ)⊧α并且(P,G,μ)⊧ω;
c)Labβ⊆{λ(e1)∪λ(e2)∪…∪λ(em)};
d)[[γ(ei,k)=Map(k)]]G,μ成立;
则对于Cypher 查询Q,其结果集为

与SPARQL 查询语句相似,最简单的Cypher 查询也主要包括两个部分:MATCH 关键字引导的约束子句和RETURN 关键字引导的结果子句.KGDB 使用下列转换规则对Cypher 语句进行处理.
规则10.对于出现在Cypher 查询语句中的所有点模式α=(a,Lab,Map),向关系表的连接列表L中添加n个关系表r1,…,rn,其中,Lab⊆{rel(r1),rel(r2),…,rel(rn)},并施加属性约束,其中,domain(Map)指Map的定义域,range(Map)指Map的值域.
规则11.对于出现在Cypher 查询语句中的所有边模式β=(d,Lab,a,Map),向L中关系表施加连接约束:

规则12.对于出现在Cypher 查询语句RETURN 子句中所有的变量var,添加投影约束:πvar.id,var.property(rfinal),其中,rfinal为连接列表L中的所有关系进行笛卡尔积后得到的最终关系结果.
可以看出:对照KGDB 统一的存储模型,Cypher 语义的转化相较SPARQL 更加容易,SPARQL 需要进行三元组的分类,根据具体分类来进行关系代数的映射;而Cypher 直接根据查询中每一部分的所属集合即可确定语义.
定理3.运用上述规则10 到规则12,可以正确地将Cypher 查询语句转化为关系代数表示的查询语义.
证明:基本的Cypher 语句中的MATCH 子句的转化在规则10 和规则11 中完成,RETURN 子句的转化在规则12 中定义.规则10 和规则11 分别针对MATCH 子句中的点模式和边模式进行约束转换:(1)当遇到带标签的点模式α=(a,Lab,Map)时,向关系表的连接列表L中添加n个关系表r1,…,rn,其中,Lab⊆{rel(r1),rel(r2),…,rel(rn)},并施加属性约束,其中,domain(Map)指Map的定义域,range(Map)指Map的值域;(2)当遇到带标签的边模式β=(d,Lab,a,Map)时,添加两条连接约束.规则12 中出现的所有变量都须在MATCH 子句中出现过,并在执行计划中对应添加投影约束πvar.id,var.property(rfinal),其中,rfinal为连接列表L中的所有关系进行笛卡尔积后得到的最终关系结果.对于两个子句中可能出现的所有模式匹配内容,都可以找到对应的查询解决方案.证毕.□
例7:图6 是一个属性图模式匹配查询,它查询的是音乐家Beethoven 创作的所有作品.在图3 的属性图中执行这个查询,可以得到虚线框标记的结果.
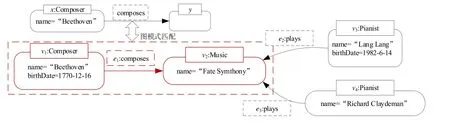
Fig.6 A basic pattern matching query example for Cypher图6 Cypher 图模式匹配查询举例
4.3 查询语言语义对齐
图7 展示了将SPARQL 查询语句与Cypher 查询语句进行语义对齐的过程.两种查询语言可以使用完全不同的语法表达相同的语义,相同的查询意图可以被分别表示为两种不同的查询语言.两种查询语言应用各自的转换规则,可以转换成相同的关系代数表示的查询语义,为后面的查询执行提供了统一的语义.
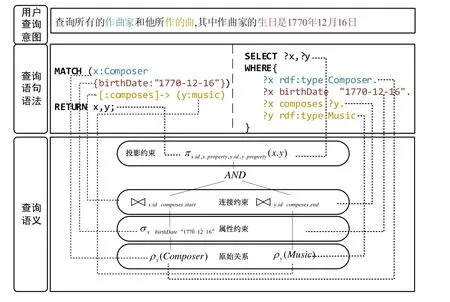
Fig.7 Semantic alignment图7 语义对齐
在统一的存储模型之上提供两种查询语言接口,可以在解决具体问题时为使用者提供更多选择,进行两种查询语言的语义对齐,实际上是对两种语言的扩展.
例8:对于图7 中的查询语句举例,下面给出两种语言分别的转化过程.
(1)SPARQL 查询转化
运用第4.1 节介绍的规则,转化SPARQL 查询语句的过程如下.
a)对三元组t1=(?x,rdf:type,Composer)和t4=(?y,rdf:type,Music),运用规则6,可知ϕ(t1)=ϕ(t4)=mem,则将对应的关系表Composer 和Music 加入到连接列表中,并将其重命名ρx(Composer),ρy(Music);
b)对三元组t2=(?x,birthDate,“1770-12-16”),运用规则7,可知ϕ(t2)=prop,则向重命名后的表x添加约束条件σx→birthDate=“1770-12-16”(x);
c)对三元组t3=(?x,composes,?y),运用规则8,可知ϕ(t3)=edge,则添加关系表之间的连接约束:

d)对结果子句中的所有变量,即x和y,运用规则9,添加投影约束πx.id,x.property,y.id,y.property(rfinal),其中,rfinal为对连接列表中所有关系表施加相应约束后做笛卡尔积的关系表.
至此,该条SPARQL 语句成功转换为图7 中的语义树.
(2)Cypher 查询转化
运用第4.2 节介绍的规则,转化Cypher 查询语句的过程如下.
a)对点模式α=({x,y},{Composer,Music},birthDate→“1770-12-16”),运用规则10,向连接列表中添加关系表Composer 和Music,并进行相应重命名,将其加入到连接列表L中:ρx(Composer)和ρy(Music).并添加约束条件σx→birthDate=“1770-12-16”(x);
b)对Cypher 语句中的边模式β=(→,{composes},nil,{⋅}),则根据规则11,添加相应的连接约束:

c)对RETURN 子句中的所有变量,即x和y,根据规则12,添加投影约束πx.id,x.property,y.id,y.property(rfinal),其中,rfinal为对连接列表中所有关系表施加相应约束后,做笛卡尔积的关系表.
根据本节介绍的SPARQL 和Cypher 查询语言相应的查询语句转化规则,能够将两种查询语言转化为相同的使用关系代数表达的抽象语义树(查询语言的语义对齐方法的正确性分析在定理2 和定理3 中分别给出),使得KGDB 在兼容两种语法完全不同的查询语言的前提下统一了查询的语义.这为查询处理后面的优化过程提供了便利,并为用户在同一个知识图谱上的查询提供了更多选择.
5 实 验
本节在合成数据集和真实数据集上验证统一存储方案的高效性和和查询语言的互操作性,并且与RDF 三元组库gStore[2]和属性图数据库Neo4j[3]进行比较.
5.1 实验环境和数据集
本文使用的实验平台为单节点服务器,节点配置主频为2.5GHz 的Intel(R)Xeon(R)Platinum 8255C 八核处理器,其内存大小为32GB,硬盘大小为100GB,使用Linux 64-bit CentOS 7.6 操作系统.
KGDB 以开源属性图数据库AgensGraph 为后端.使用的Neo4j 版本为4.1.0 社区版,使用neosemantics 插件4.0.0.1 版本,以在Neo4j 中支持RDF 图的存储,使用的gStore 版本为0.7.2.本文进行三个系统的存储效率的对比实验,并在KGDB 和gStore 系统上进行SPARQL 基本图模式查询对比实验,在KGDB 和Neo4j 上进行Cypher查询对比实验.从存储空间、存储时间和查询效率上进行系统的全面评估.
本文使用的数据集包括LUBM[37]标准合成数据集以及DBpedia[38]真实数据集.LUBM 允许用户定义数据集的大小,本文使用了五个不同规模的LUBM 数据集(即LUBM10,LUBM20,LUBM30,LUBM40 和LUBM50)进行实验测试和比较;DBpedia 数据集是从维基百科中提取实体关系生成的一个真实数据集.本次实验中,所有数据集均以N-Triple 格式表示,表2 给出了实验数据集的具体统计信息.
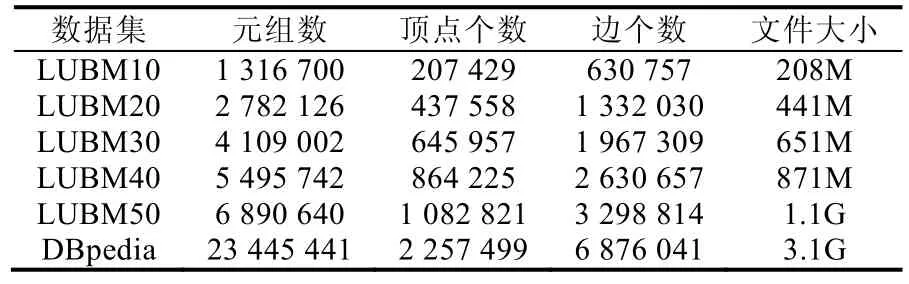
Table 2 Datasets表2 数据集
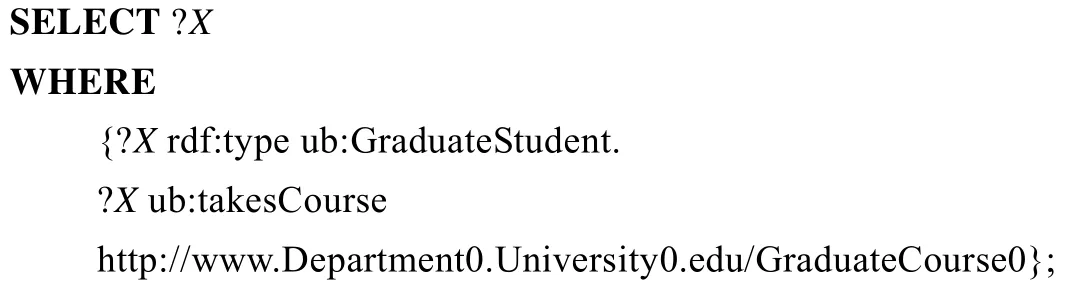
在LUBM 数据集上执行的查询来自LUBM 提供的14 个标准查询中的8 个(即Q1~Q6,Q11 和Q14).其中,
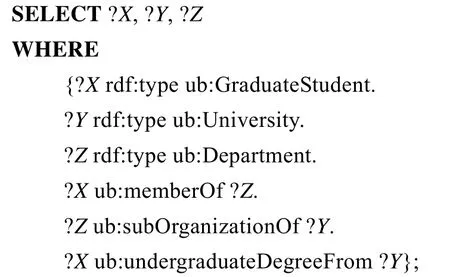
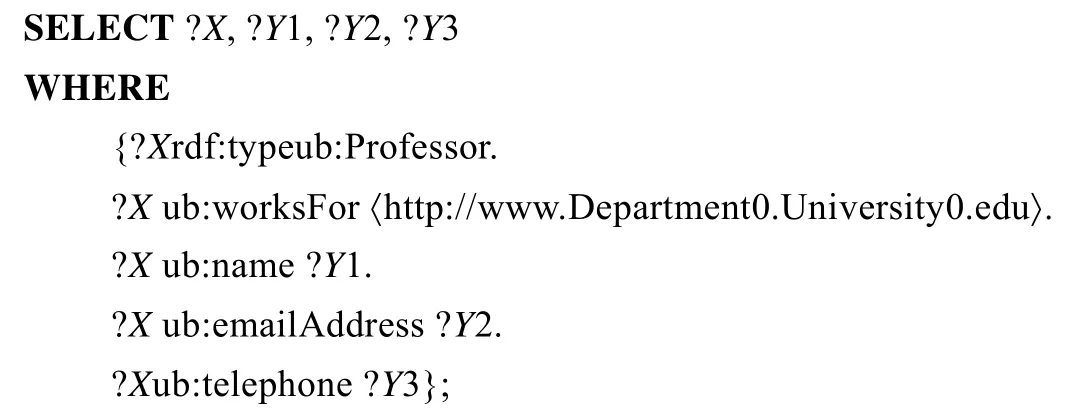
• Q1~Q3 和Q14 为不涉及推理的SPARQL 查询:(1)Q1 输入数据量大,选择度高;(2)Q2 为涉及3 个实体的三角查询;(3)Q3 查询涉及的类型数据量大;(4)Q14 输入数据量大,选择度低;
• Q4~Q6 和Q11 为涉及到推理的查询.
gStore 并不支持RDF 图上的推理功能,而Neo4j 也仅仅可以需要通过插件的方式支持推理功能.同样的,KGDB 也尚未支持推理查询,故本文仅在gStore 和KGDB 上进行推理查询返回空结果的查询效率对比实验.LUBM 数据集中涉及推理的查询可以简单分为4 类:(1)Q4~Q9 涉及到subClassOf 层次类型;(2)Q5 包含subPropertyOf 层次关系,查询中包含的内容需要借助本体信息才可直接执行;(3)Q6~Q10 需要进行层次类型推理,即查询中涉及的实体层次类型关系在本体信息中也未直接给出;(4)Q11~Q13 需要进行更加复杂的关系推理,即除了subClassOf 和subPropertyOf 关系之外的关系推理.本文在LUBM 数据集上的实验部分在4 类推理查询中各选择一个进行比较实验.因为缺乏DBpedia 数据集上的查询模板,本文设计了4 个包含不同数据量的查询(记为Q_dbp1~Q_dbp4).Q_dbp2~Q_dbp4 的基本结构相同,不同的只是数据量的大小:Q_dbp4 数据量最大,达到数百万条;而Q_dbp2 最小.
5.2 实验结果
本节在3 个方面进行实验结果比较,包括存储时间、存储空间和SPARQL 或Cypher 的查询效率.以下实验结果中,每个查询测试均进行3 次取平均值,避免随机误差.
5.2.1 存储时间
如图8(a)所示:在存储时间上,KGDB 比gStore 和Neo4j 需要的时间短,gStore 所需的存储时间最长,并且随着数据量的增长,各个系统之间的时间差异越来越大,KGDB 的优势越加明显;在数据量最大的数据集DBpedia上,KGDB 可以达到gStore 及Neo4j 存储速度的将近10 倍,将存储效率提高一个数量级.
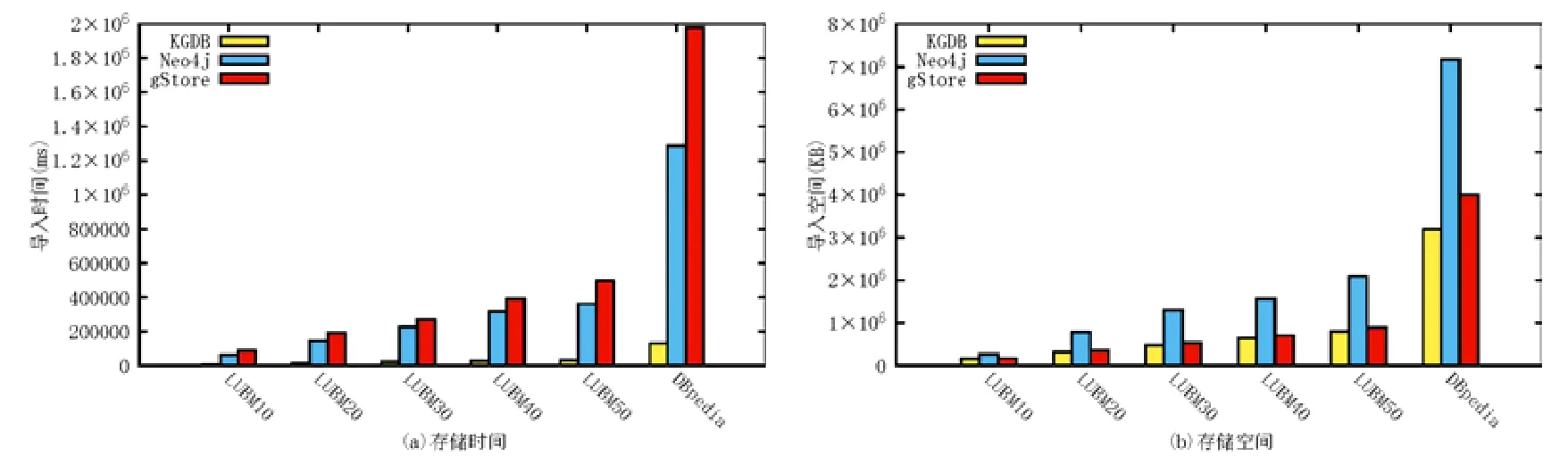
Fig.8 Results for data insertion and storage space图8 存储时间、存储空间实验结果
在存储处理过程中,KGDB 仅需要一次无类型实体聚类过程,即可多次进行数据集的存储,在存储过程中,不需要复杂的转换过程.对应的,gStore 需要进行字符串与id 的转换、VS 树的建立等等过程,Neo4j 需要进行类型到标签的转化等等过程.
5.2.2 存储空间
如图8(b)所示:在存储空间上,KGDB 也相较gStore 和Neo4j 优势明显.3 个系统中:Neo4j 所需存储空间大于数据集本身的大小,最高可以达到数据集本身的2 倍;gStore 可以将数据集压缩存储,最大压缩率达到0.8;相比之下,KGDB 最大压缩率达到0.7,实现数据的高效存储.随着数据量的增长,使用字典编码的KGDB 在存储空间上的优势越加明显.需要注意的是:Neo4j 社区版仅可以使用两个数据库(database),而每个数据库仅能配置一个图(graph),这就要求用户在需要建立多个知识图谱数据库时,做Neo4j 系统的全备份.虽然专业版提供了多数据库的支持,但社区版的配置无疑限制了普通用户的使用,也增加了存储多个独立知识图谱的存储空间要求.
在本文的实验中,仅计算单个数据库在装载知识图谱前后的空间变化.如果将系统空间要求计算在内,Neo4j 的知识图谱存储所需空间会更大.
5.2.3 查询效率
查询效率实验分别在LUBM 合成数据集和DBpedia 真实数据集上进行.在LUBM 数据集上,采用了4 个基本查询和4 个涉及推理的查询.在DBpedia 上,设计了4 个查询,其中:Q_dbp1 输入数据量大,选择度高;Q_dbp2~Q_dbp4 具有相同的结构,数据量依次增大.在同样的语义下,分别构造SPARQL 和Cypher 查询语句,并在对应系统上进行实验.
(1)SPARQL 查询效率实验.
gStore 是RDF 图数据库,使用SPARQL 作为其查询语言,可以支持大规模RDF 知识图谱的数据管理任务.KGDB 与gStore 系统的SPARQL 查询效率对比实验结果如图9 所示:gStore 不能支持最复杂的涉及3 个实体的三角查询Q2,而KGDB 可以在较短时间内完成这一查询.对于Q3,随着数据量的增加,KGDB 与gStore 相比,其查询时间增长幅度更小,表明KGDB 在大规模知识图谱数据上的查询效率优于gStore.在其他两个查询Q1和Q14 上,KGDB 可以达到与gStore 相同的数量级,因此具有可比性.
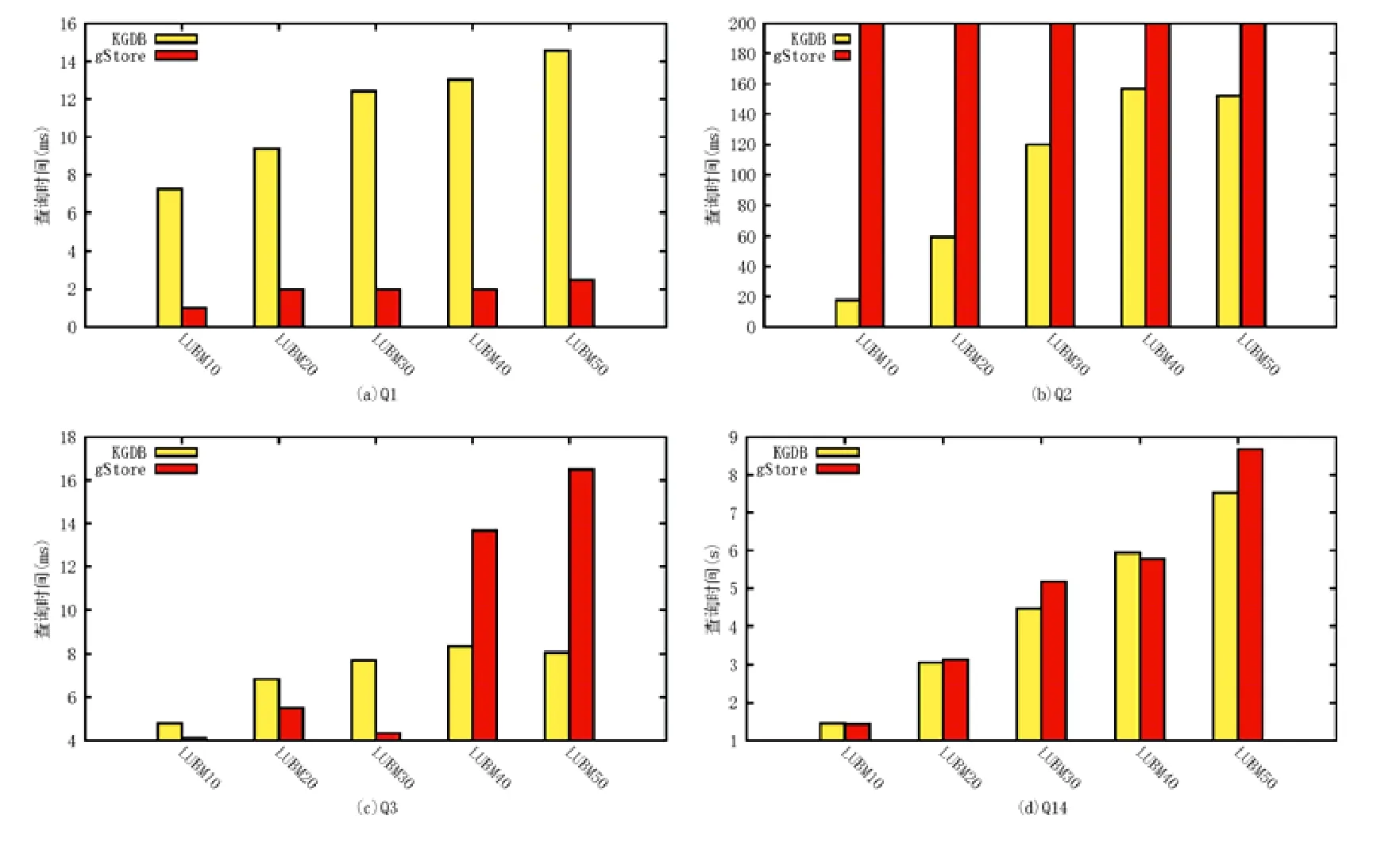
Fig.9 Query efficiency experimental results on LUBM by SPARQL for KGDB and gStore图9 在LUBM 数据集上的KGDB 和gStore 的SPARQL 查询效率实验结果
LUBM 提供的标准查询Q2 是选取的4 个不涉及推理的查询中最为复杂的,在gStore 系统上将会引起系统错误,不能够直接执行.为了公平比较,没有进行查询的改写.对于查询Q1 和Q3,其基本结构是一致的,区别在于涉及的实体的数据量不同,Q3 的输入数据量更大.而相较而言,KGDB 可以在Q3 上呈现出平缓的查询时间增长趋势,说明KGDB 可以应对大规模知识图谱上的查询,数据量的增长不会导致查询效率的降低.对于查询时间最长的Q14,该查询涉及的实体数量巨大,在LUBM50 上,查询结果将需返回数十万条数据.在这一查询上,KGDB和gStore 的查询时间可以达到同一数量级.
如图10 所示,在gStore 和KGDB 上的SPARQL 推理查询实验结果表明:两个系统均不支持涉及推理的查询,但都能在较短时间内给出查询结果,虽然因缺乏推理功能导致查询的最终结果为空.对于相同的LUBM 标准查询,KGDB 能够在更短的时间内给出查询结果,并且查询时间随数据集规模增长的幅度与gStore 相比更小.
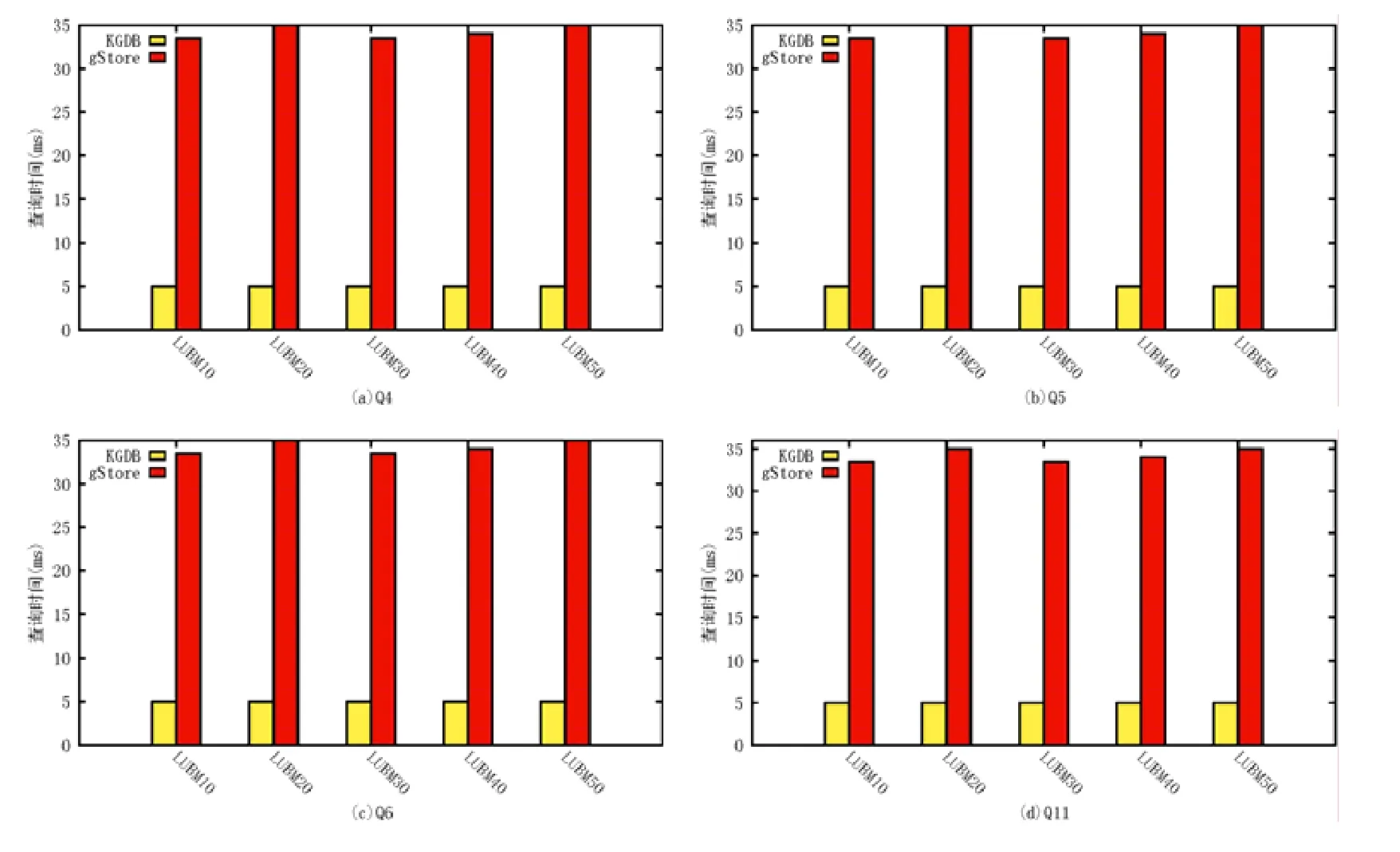
Fig.10 Inference query efficiency experimental results on LUBM by SPARQL for KGDB and gStore图10 在LUBM 数据集上的KGDB 和gStore 的SPARQL 推理查询效率实验结果
如图11 所示,可以得出结论:在DBpedia 数据集上,对于查询Q_dbp1~Q_dbp3,KGDB 可以达到比gStore 更快的查询速度,KGDB 在最优的查询(Q_dbp1)上,可以将查询速度提升一个数量级.这说明在选择算子的处理上,KGDB 拥有较大优势.而对于最慢的查询(Q_dbp4),KGDB 也可以达到与gStore 相同的数量级.
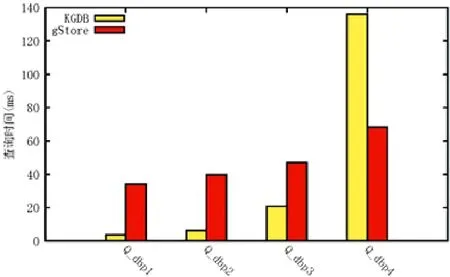
Fig.11 Query efficiency experimental results on DBpedia by SPARQL for KGDB and gStore图11 在DBpedia 数据集上的KGDB 和gStore 的SPARQL 查询效率实验结果
(2)Cypher 查询效率实验.
Neo4j 是属性图数据库,使用Cypher 作为查询语言,支持完整的ACID 规则,可以更加快速地处理连接数据.下面将进行KGDB 和Neo4j 系统的Cypher 查询效率对比实验.
如图12 所示:在LUBM 数据集上,KGDB 在3 个标准查询Q1,Q3 和Q14 上都可以达到比Neo4j 更快的速度;在最优的查询上(Q3),KGDB 比Neo4j 快近70 倍;而在最慢的查询上(Q2),KGDB 也可以达到与Neo4j 相同的数量级.
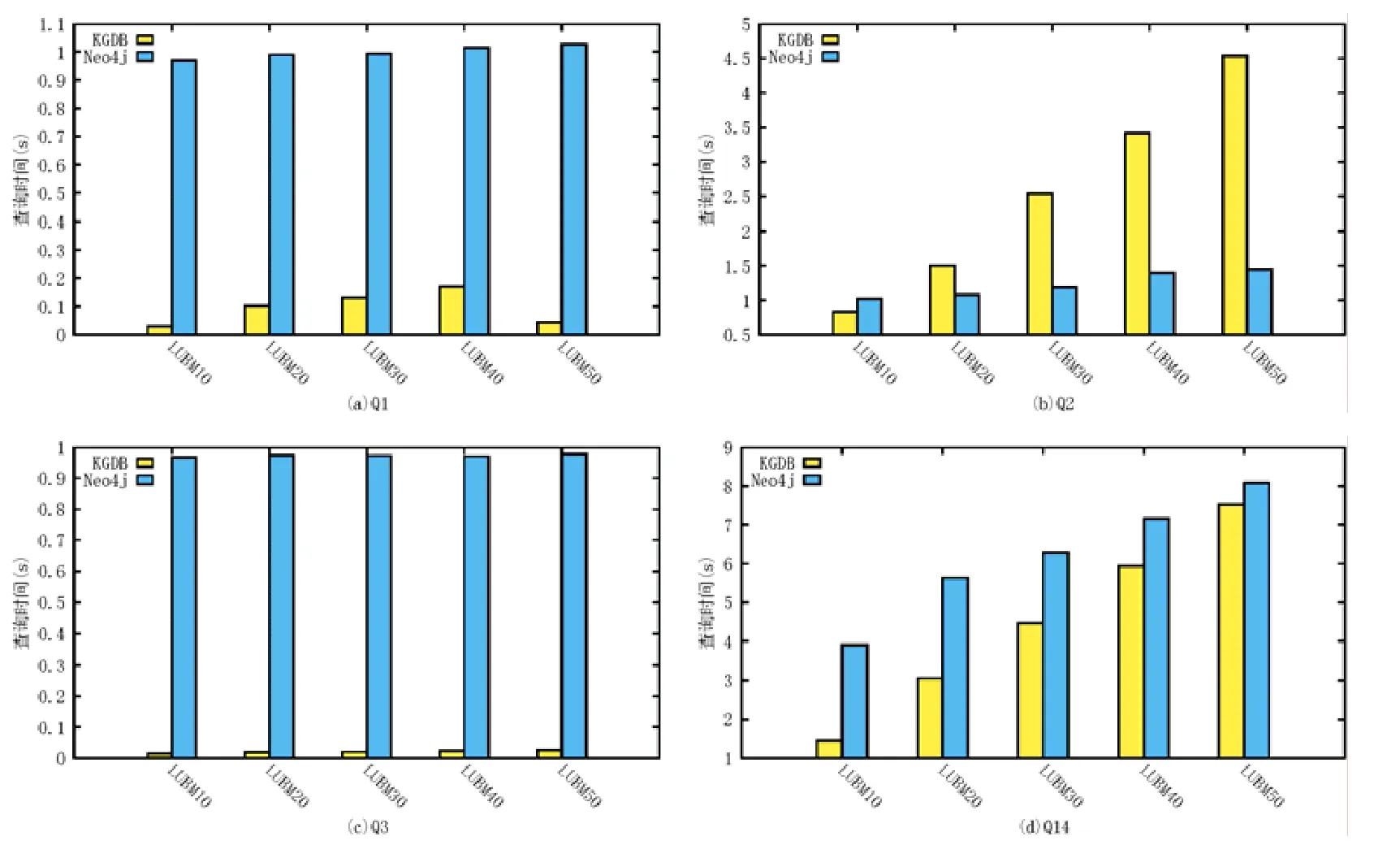
Fig.12 Query efficiency experimental results on LUBM by SPARQL for KGDB and Neo4j图12 在LUBM 数据集上的KGDB 和Neo4j 的SPARQL 查询效率实验结果
对于最复杂的三角查询Q2,KGDB 的查询速度慢于Neo4j.这是因为Neo4j 的存储方式使之查询结点之间的连接变得容易,而不需要像KGDB 这种关系数据库,执行耗时的连接(JOIN)操作.但是,KGDB 相较于Neo4j 拥有更多优势:(1)KGDB 不需要单独的插件,原生的支持RDF 图和属性图的统一存储,并在存储过程中,比Neo4j需要更短的存储时间和更小的存储空间,同时管理多个知识图谱更加容易;(2)KGDB 同时支持SPARQL 和Cypher 查询语言,允许两个查询语言在同一知识图谱上的互操作.
在DBpedia 数据集上的实验结果表明(如图13 所示):在所有查询上,KGDB 都可以达到比Neo4j 更快的查询速度.对于最优的查询(Q_dbp3),KGDB 可以比Neo4j 快2 个数量级;而最慢的查询(Q_dbp4)上,KGDB 也可以达到14 倍于Neo4j 的查询速度.
从LUBM 上的实验结果随数据量增长呈现的趋势上来看:KGDB 在数据量不断增长后,相较Neo4j 的优势逐渐变小,但查询时间仍然低于Neo4j.在最复杂的查询上(Q2)也可以得出相似的结论,即:随着需要遍历的数据量增大,Neo4j 查询时间的增长幅度相较KGDB 小,但这种增长不会带来数量级的变化.而在DBpedia 上的实验结果表明:因为真实数据集所表现出的半结构化和稀疏性,查询涉及数据量的增长将会为KGDB 带来优势.
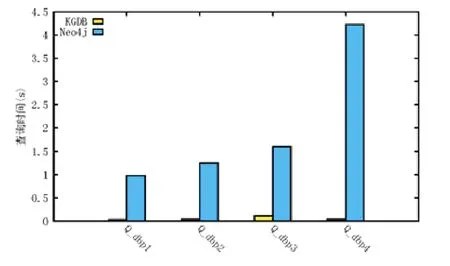
Fig.13 Query efficiency experimental results on DBpedia by Cypher for KGDB and Neo4j图13 在DBpedia 数据集上的KGDB 和Neo4j 的Cypher 查询效率实验结果
6 总结
本文研发了统一模型和语言的知识图谱数据库管理系统KGDB.
(1)统一存储:支持存储RDF 图和属性图数据,使用字典编码,提高存储效率,节省存储空间,使用基于特征集的聚类方法,解决无类型实体的存储问题,使得具有相近语义的实体存储在同一关系表中,提高查询效率;
(2)互操作语法层:进行两种数据模型之上的查询语言SPARQL 和Cypher 的语义对齐,即对同一知识图谱,使用两种查询语言都可以得到相同的查询结果,达到查询语言互操作的目的;
(3)统一语义层:SPARQL 和Cypher 两种查询语言可以通过转换规则,转化为关系代数表示的相同的抽象查询语义树.
真实数据集和合成数据集上的实验验证了KGDB 系统的存储效率和查询效率,实验结果表明:KGDB 在真实数据集上普遍优于gStore 和Neo4j;而在合成数据集上,KGDB 可以与gStore 和Neo4j 达到相同数量级.
本文只讨论了单机系统上的知识图谱管理问题,随着知识图谱数据规模的不断增大,分布式知识图谱管理系统将成为研究热点.在后续工作中,我们将会讨论分布式环境下知识图谱的统一存储方案和查询处理方法.
附 录
1.LUBM数据集上的查询
1)SPARQL 查询
(1)Q1
(2)Q2
(3)Q3

(4)Q4
(5)Q5
(6)Q6

(7)Q11


(8)Q14

2)Cypher 查询
(1)Q1
(2)Q2(3)Q3

(4)Q14
2.DBpedia数据集上的查询
1)SPARQL 查询
(1)Q_dbp1
(2)Q_dbp2
(3)Q_dbp3

(4)Q_dbp4

2)Cypher 查询
(1)Q_dbp1

(2)Q_dbp2

(3)Q_dbp3

(4)Q_dbp4