风廓线雷达测风资料对比分析及问题探讨*
——以翔安风廓线雷达为例
2021-05-21汪学渊曾瑾瑜汪胜宝
汪学渊 曾瑾瑜 汪胜宝
(1.福建省大气探测技术保障中心,福建 福州 350007; 2.福建省气象台,福建 福州 350001;3.福建省武夷山市气象局,福建 南平 353200)
风廓线雷达可以连续获得大气垂直分布的水平风廓线,是增强灾害性天气监测能力和提高短时数值预报模式质量的重要手段。然而,由于受探测能力限制,易受杂波干扰,受晴、雨和温度、压力、湿度影响显著等因素,也导致风廓线雷达观测数据的稳定性、准确性有待提高,要解决风廓线雷达测风数据的业务应用问题,必须对风廓线雷达观测数据存在的问题进行研究。目前,国内不少学者开展关于风廓线雷达和L波段探空资料的对比研究,孙旭映等指出地面至高空200m范围内,风廓线仪探测的风向、风速与气球探测值有一定偏差,而200m以上具有很好的相关性,但在风廓线雷达的最大探测高度处偏差很大[1]。曲巧娜等利用两种雷达的测风数据进行相关、误差及有效样本比率分析,总结出两种雷达水平风速显著正相关,当水平风相差≤20°时,有效样本比率基本在70%以上[2]。吴蕾等对风廓线雷达在不同高度、不同时次、不同风速条件下的探测准确性进行了分析,结果表明二者测风结果有较好的一致性,u,v分量的标准差在2.3 m/s左右[3]。王栋成研究了两种雷达长时间序列在有降雨和无降雨时段两者的风向、风速总体一致性较好,相关性较高,并具有较好可比性和互补性的结论[4]。汪学渊等对风廓线雷达测风能力进行了评估,总结出了风廓线雷达与探空雷达之间的测风偏差,两者具有较好的一致性[5]。前人已经做了大量的风廓线雷达和探空雷达对比分析,重点分析了两种雷达探测风场的差异程度,评估了风廓线雷达资料的准确性和差异性,但是对两种雷达资料处理各不相同,仅仅是简单介绍。由于两种雷达的探测原理不同,生成的风场资料格式不同,存在严重的时空差异,对于两种风场资料的处理如何才能在时间和空间上很好的匹配,是对比过程中一个重要环节,不同处理方式往往会得到不同的对比结果,那么分析的结论会有所偏差。本文将重点分析风廓线雷达和L波段探空雷达风场资料的优化处理方法,并给出对比结果,通过对比分析总结风廓线雷达测风资料存在的问题,为风廓线雷达资料的业务应用以及质量控制提供重要参考[6]。
1 资料来源和数据处理
一般来讲,风廓线雷达测风和气球探空测风的取样空间是不同的。风廓线雷达获得的是固定在雷达上方所有高度层上取样空间的平均廓线,其获取一组廓线的时间为6 min左右,取样空间在低/高模式的分辨率为120/240 m,探测高度一般在6~8 km;而探空的测量是在不同时间和不同地点进行的,探空气球上升到10 km所需要的时间一般约为15min,同时也会飘离到气球释放点10km以外。因此,风廓线雷达和气球探空测到风场有时间和空间上的差异。根据风廓线雷达和气球探空的探测原理,如表1所示,期望在大气较为均匀时,气球探空和风廓线雷达测风能够有较好的一致性。虽然风廓线雷达和探空在测量原理上有很大的时空差异,但是由于探空是目前高空风探测的标准,用探空与风廓线雷达作对比可以获得风廓线雷达测风数据的特性。

表1 风廓线雷达与L波段探空雷达测风技术参数对比
福建省目前已建设18部风廓线雷达,其中2部CFL-03型边界层风廓线雷达,16部CFL-06低对流层风廓线雷达,但是离风廓线雷达最近理想距离的探空站点为厦门探空站,与之相对应的是翔安风廓线雷达站,翔安站点在厦门探空站的东北方位,他们之间的直线距离为25km,厦门常年吹西风,气球放出后,往往是朝着翔安站点方向漂移,因此两部雷达在空间上是有对比条件的。探空数据采用2016年5月到2017年4月的数据,探空站一天仅探测两次(07∶15、19∶15),全年总共730组数据,剔除一些质量不好的数据,晴天得到607组,降雨得到93组。探空数据的提取利用L波段高空气象探测系统数据处理软件,提取等间隔高度(30m)上的要素值,换言之,数据处理软件会自动计算出每隔30m的风场数据,之所以选择30 m,首先是高度分辨率高,再者与风廓线雷达高度分辨率120/240m相匹配,4个30m刚好与120m的空间匹配,8个30m刚好与240m的空间匹配,这样减少了两者之间的垂直空间误差。在时间上的匹配,两者不可能做到完全时间上的匹配,这是两者探测方式不同所决定的,只能折中处理,风廓线雷达的时间分辨率6min一组,最大探测高度为9000 m,探空雷达一次连续探测高度一万米的时间大概是25min,CFL-06型风廓线雷达风场探测高度主要集中在6 km左右,有天气过程时会到1万m高度,气球升到6 km的时间大概在15min左右,因此选取放球后10min左右所对应的风廓线数据前后共三组廓线数据进行平均的风场数据(假定在这20min的时间范围内水平风场均匀一致)。
对比数据的选择完全采用人工来挑选和剔除,对存在严重数据质量缺陷或者可用数据低的,予以舍弃,最后生成总数据有33671对,其中晴天数据有28996对,降雨数据有4675对。对比的方式主要有:在降雨和无降雨天气情况各高度层风场绝对差值的均值和标准差;按误差范围统计风场的绝对差值分布;按风速分类的风场绝对差值的均值和标准差,以直观的方式统计风廓线雷达与L波段探空雷达风场的差异。
2 所有测风数据的对比分析
2.1 降雨和无降雨天气情况分类对比
之所以分为降雨和无降雨天气进行风向、风速的对比,是由风廓线雷达自身的探测机理所决定的。在晴空天气下,风廓线雷达探测的对象是大气湍流,雷达接收到的回波是大气湍流造成的折射率分布不均匀而产生的后向散射能量;在降雨的情况下,对于L波段风廓线雷达探测对象发生了变化,由于L波段电磁波对降水粒子更加敏感,因此探测的对象主要是降水粒子,而雷达接收到的回波是降水粒子的后向散射能量,所观测到的是降水粒子随风移动的风场。吴蕾[3]和邓闯[7]研究表明,风廓线雷达在有无降水天气下,其探测精度有明显的差异,因此有必要分为降雨和无降雨天气进行对比,以考察在不同天气条件下雷达的探测精度。图1(a)和图1(c)为晴天风向、风速绝对差值的均值和标准差随高度的分布,以蓝色曲线表示,从图中可以看出,根据误差的分布情况,风向、风速在低空(500 m以下)和高空(8000 m以上)都存在误差加大的情况,低空误差大是因为风廓线雷达低空数据容易受到杂波的干扰,高空误差大是因为雷达接收的回波信号十分微弱,存在信号识别错误的情况,以致误差加大。晴空风向的误差均值稳定在10°~20°之间,风速的误差均值稳定在1~2m/s之间,误差变化比较平缓。
图1(b)和图1(d)为降雨风向、风速绝对差值的均值和标准差随高度的分布,以红色曲线表示,从图中可以看出,根据误差的分布情况,风向、风速相对晴天误差明显加大,风向的误差均值稳定在10°~30°之间,风速的误差均值稳定在2~3m/s,误差变化波动比较大。误差大主要集中在低空2000m以下,其主要原因在于降雨时五波束探测空间一致性差,即降雨粒子的不均匀分布所引起的,特别是对流性降雨过程,雷达生成的风场出现大量错误的风场观测值,同时也能看出高空的误差明显比低空的误差小,是由于在降雨天气下高空4000m以上存在大量分布均匀的冰晶颗粒随风移动,雷达五波束探测空间一致性好,生成的风场更加接近实际值。图1(e)和图1(f)分别为风向、风速差值的均值在不同天气下的变化情况,主要为了反映降雨和晴天风向、风速误差的对比,从图中可以看出,降雨带来的误差总体明显大于晴空。

(a)晴天风向差值的均值和标准差随高度分布
2.2 按误差范围统计风场的绝对差值分布
对风速、风向差值按误差范围分布进行统计,主要是观察风廓线雷达风场误差在不同误差范围的比例情况,把风速误差分为(0~1.0m/s、1.0~2.0m/s、2.0~3.0m/s、3.0~4.0m/s、4.0m/s以上)5个档次,把风向误差分为(0~10°、10°~20°、20°~30°、30°~40°、40°以上)5个档次。如图2和图3所示,风速误差在0~2m/s所占样本比例晴天为74.9%,降雨占55.5%;风向误差范围在0°~20°所占样本比例晴天为82.6%,降雨占75.4%;可以看出,降雨降低了风廓线雷达资料的准确性和可用性。从以往的总结来看,主要原因是强对流天气和雨滴的空间分布不均匀性引起的,风廓线雷达五波束中东西向或南北向波束水平距离从低空到高空可达100米到几千米,降雨在空间上的不均匀分布违背了风廓线雷达要求的局地均匀各向同性的原则,因此预报员在使用风场资料时,应该慎重考虑在强降雨过程所生成风场资料的可靠性。

图2 风速差值不同范围按比例分布

图3 风向差值不同范围按比例分布
为了说明时空匹配的重要性,在这里进行了未时空匹配的风速和风向差值按误差范围统计,未时空匹配是指风廓线雷达和L波段探空雷达在指定高度上风场的直接对比,如图4和图5所示,同样把风速误差分为如上所述5个档次,把风向误差分为如上所述5个档次。未时空匹配的风速误差在0~1m/s所占样本比例晴天为39.58%,降雨占27.74%,分别比时空匹配的风速误差晴天低了7.75%,降雨低了3.83%;未时空匹配的风向误差范围在0~10°所占样本比例晴天为55.87%,降雨占51.85%,分别比时空匹配的风向误差晴天低了5.47%,降雨低了0.78%;说明未进行时空匹配对在误差范围为0~1.0m/s和0~10°的数据影响很大,严重影响了数据的对比分析,降低了风廓线雷达风场资料评估的准确性,因此进行时空匹配是两种雷达探测数据对比评估一项重要的措施。
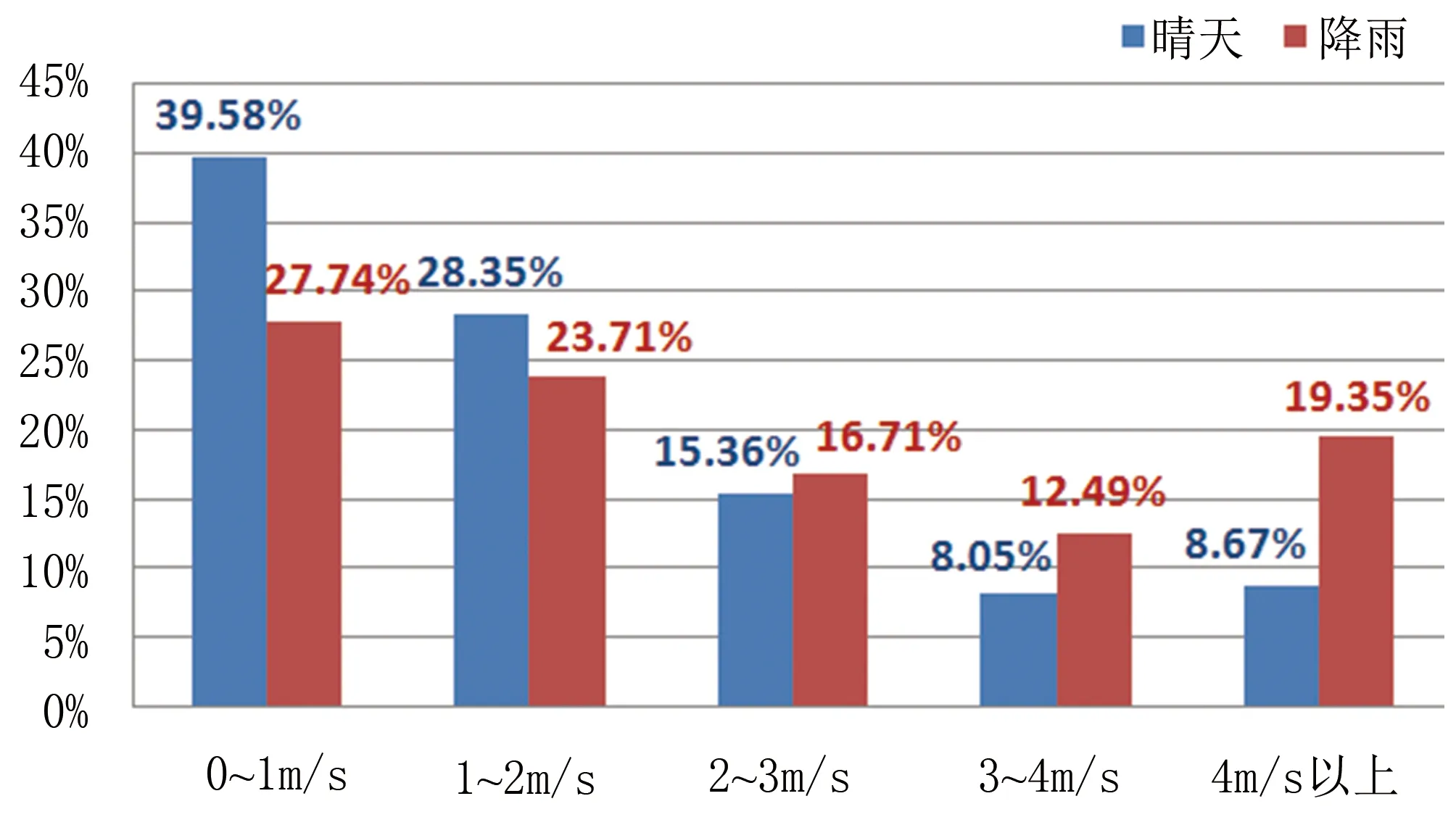
图4 未匹配风速差值不同范围按比例分布
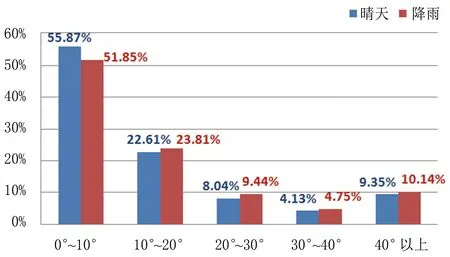
图5 未匹配风向差值不同范围按比例分布
2.3 按风速分组测风数据对比
为了获得不同大气风速条件下风廓线雷达与L波段探空雷达风向和风速对比差异分布情况,将所有晴空数据按照L波段探空雷达测得的水平风速进行分组,分为0~5m/s、5~10m/s、10~15m/s、15~20m/s、20m/s,统计结果如图6所示。从图6可以看出,风向的误差均值分别为27.64°、10.06°、6.59°、5.82°、5.44°,说明风速越小的情况下,风向的误差越大,0~5m/s范围的风向误差严重偏高;而图7中风速的误差均值分别为1.29m/s、1.45m/s、1.54m/s、1.56m/s、1.75m/s,虽然风速的误差是随着风速的增大而缓慢增加,但是从相对风速(即误差均值和风速的比值)的角度来看,风速的误差是风速越小,相对误差越大;因此在风速比较小(5m/s以下)的情况下,根据风场的计算原理,较小的风速必定对应较小径向速度,那么在风廓线雷达功率谱上径向速度就更加靠近零频位置,而零频位置往往容易受到地物杂波的干扰,造成信号和地物杂波混叠在一起或者由于地物杂波信号太强以致于湍流信号被淹没完全无法识别,使得径向速度识别错误或者识别精度降低,所以必须利用信号处理算法提高零频附近大气回波信号识别和雷达地物杂波抑制水平。因此,在应用风速比较小的数据时应该特别注意,特别是应用在数值模式中,应用前有必要进行质量控制,质量控制的方法多种多样,主要有三个方面:利用风廓线雷达自身精度特性,利用模式背景与风廓线雷达风场误差的统计特性,利用算法对风廓线雷达生成风场的各个阶段分步质量控制,本文不再详细叙述。

图6 按风速分类的风向差值的均值和标准差

图7 按风速分类的风速差值的均值和标准差
3 结论
本文利用风廓线雷达与L波段探空雷达一年的风场资料,对二者探测结果进行对比,考虑到风廓线雷达和L波段探空雷达之间测风原理和数据格式的不同,对二者数据进行时间和空间上的匹配,通过降雨和无降雨天气分类、误差范围分布和风速分组方式的风场对比,揭示风廓线雷达测风数据存在的问题,结论如下:
采用时空匹配方法进行两种雷达风场误差的对比分析,风廓线雷达测风资料的影响主要有以下两个方面:一方面,风廓线雷达自身探测能力的影响,晴空下风廓线雷达在低空和高空风场的误差较大,其主要原因是低空地物杂波干扰和高空湍流回波信号较弱,特别是低空风速比较小的情况下,其误差特性尤其明显;另一方面,风廓线雷达自身探测机制的影响,雷达探测空间风场违背局地均匀各向同性的原则都会产生较大的风场误差,尤其在强降雨或者对流性降雨过程,其误差特性尤其明显。因此,在应用风廓线雷达风场资料时应根据以上存在的问题上进行质量控制,以反映真实的大气风场。