多源信息融合的插电式混合动力公交车行驶工况构建
2021-05-19高建平郗建国
孟 垚, 高建平, 吴 琼, 郗建国
(河南科技大学 车辆与交通工程学院,河南 洛阳 471003)
0 引言
能源短缺和环境污染是全球面临的巨大挑战,发展新能源汽车已成为全球共识[1]。插电式混合动力公交车(plug-in hybrid electric bus,PHEB)作为新能源汽车中的典型代表,具有比传统混合动力汽车更好的经济性和排放性,已成为极具发展潜力的新能源汽车[2]。在PHEB的设计和开发过程中,行驶工况对PHEB最优的能量分配起着至关重要的作用[3]。目前,大多数PHEB的能量管理都是基于标准工况,并不能很好地反映整车在实际道路上行驶时的工况。因此,构建能够表征实际道路状况的行驶工况,对进一步挖掘PHEB节能的潜力具有重要的意义。
目前,最常使用的构建行驶工况的方法包括短行程法、聚类分析方法、小波变换方法和马尔可夫方法[4-7]。文献[8]利用短行程法构建了行驶工况,建立了组合优化算法对初始聚类中心进行优化,使构建的行驶工况更加精确。 文献[9]使用聚类方法,将原始的行驶数据分成代表公交车不同时间、不同路段上的若干类行驶特征,通过构建类内马尔可夫模型,生成类内行驶工况。文献[10]将自组织映射(self-organizing maps,SOM)网络得到的权值作为模糊C均值(fuzzy C means,FCM)的初始聚类中心,基于改进的FCM聚类法构建了合肥市道路行驶工况。文献[11]通过小波变换对原始行驶数据进行预处理,利用运动片段+主成分分析+聚类分析+离差平方和+速度阈值的方法,构建了长春市轻型车城市道路行驶工况。文献[12]提出了一种基于马尔可夫链的城市道路行驶工况的构建方法,与传统的短行程法相比,构建精度提高了2.4%。但由于实际的道路行驶工况受诸多因素的影响,其中实时的道路交通信息是影响道路行驶工况的重要因素之一。上述研究中所构建的工况都是基于原始行驶数据,均未考虑实时的道路交通信息对行驶工况构建的影响,因此,构建的行驶工况不能较好地反映实际道路的行驶工况。随着智能网联汽车和智能交通的发展,将实时交通信息考虑到工况构建中已成为一个亟需解决的问题。
为了使构建的工况能够更加符合实际的交通状况,本文通过车载终端采集实车的原始行驶数据,在利用马尔可夫理论构建全局行驶工况的同时,结合毫米波雷达和视觉传感器获取道路交通信息,对构建的全局行驶工况每300 s进行一次更新,从而构建出能够表征实际道路状况的行驶工况,反映出整车更加真实的油耗。
1 实时交通信息的获取与处理
1.1 实时交通信息的获取
汽车在实际道路上行驶时,由于道路交通环境复杂,不可控因素过多,获取有效数据较为困难。因此,本文通过仿真软件Prescan建立虚拟的驾驶场景,进行模拟驾驶操作,利用Prescan内置的毫米波雷达和视觉传感器获取前方道路实时交通信息,表1为所选用的传感器及其基本参数。
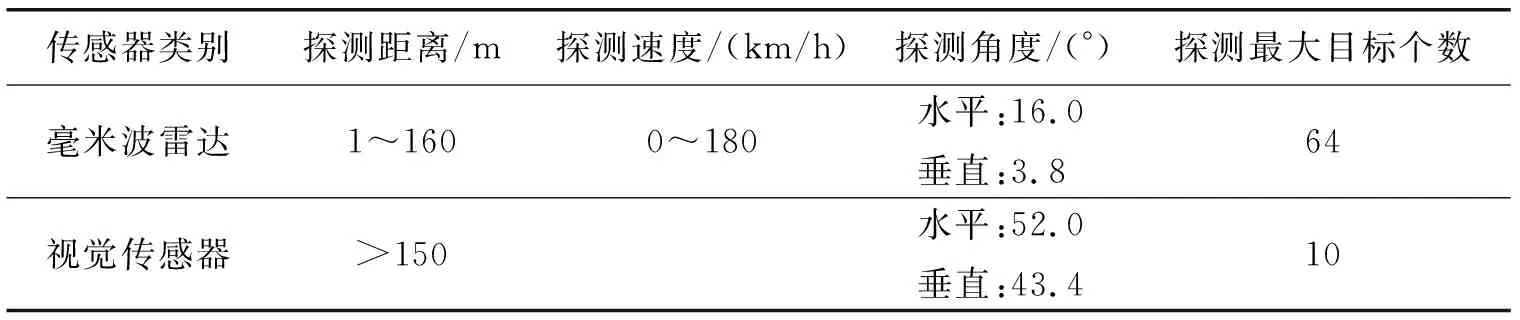
表1 传感器及其基本参数
1.2 实时交通信息的多源信息融合
D-S证据理论具有较强的处理不确定性信息的能力[13]。本文利用毫米波雷达可以获取与前方车辆的相对车速和相对距离。视觉传感器可以获取车辆周围的交通环境,并准确识别目标车辆。通过D-S证据理论将传感器获取的信息进行融合,融合算法的步骤如下:
步骤1 对毫米波雷达和视觉传感器获取的速度数据和交通流量数据进行离散化处理,并将它们分成Nf和Nv个区间,即F1,F2,…,FNf和V1,V2,…,VNv。因此,可以得到Nf×Nv形式的关联规则[14]:
Fa⟹Vb,a=1,…,Nf;b=1,…,Nv,
(1)
其中:Fa为采集的流量值;Vb为采集的速度值。
通过上述关联规则,可以得到关联规则的支持度矩阵Sup和可信度矩阵Con。
(2)
(3)
其中:nab是当交通流量在区间Fa且速度在区间Vb时出现的频率。
步骤2 设识别框架U={Va},a=1,…,Nv,对传感器获取的每个待融合的数据值(速度值和交通流量值),按照一定的规则分别转换到U上的基本概率函数。
传感器获取的速度的基本概率函数与速度值的可信度α以及速度值所在的速度区间的位置有关。根据速度值判断它所在的速度区间Va[15]。
(4)
(5)
其中:m1(Va)为速度值的基本概率函数;Vb0是速度区间Vb的平均值;LV是速度区间大小;m(A)为A的基本概率赋值;A为识别框架U的一个子集;α为传感器采集的速度信息的准确度。
交通流量的基本概率函数是根据速度值和临界速度值对道路的交通状态进行判断。交通流量的基本概率函数可以表示为:
(6)
其中:m2(Fa)为交通流量值在区间Fa时,速度值在每个速度区间的可信度;n为临界速度值所在的速度区间的标号;Coec、Coef分别为道路交通流量处于拥堵状态和畅通状态的概率。
步骤3 速度值的基本概率函数m1(Va)和交通流量值的基本概率函数m2(Fa)的合成规则为[16]:
(7)
(8)
步骤4 本文选择每个待融合数据中具有最大可信度函数的子集Vb作为证据理论的决策[17],即:
(9)
Bel(Vb)=max(Bel(Va))。
(10)
2 实时全局工况构建
2.1 车速片段的划分
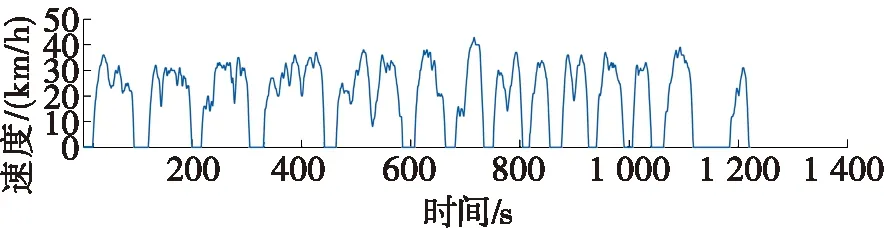
车速片段是将原始行驶数据按照特定的规则进行划分。本文选用采样频率为1 Hz的车载数据终端,利用车载数据终端与整车控制器进行通信,通过控制器局域网(controller area network,CAN)总线获取车辆原始数据,其主要包括车速、瞬时加速度和时间。采样时间为1个月,有效数据共603 000条。将车辆从一个怠速开始到下一次怠速开始之间的运动定义为车速片段,图1为车速片段示意图。采集的原始行驶数据可以划分为5 668个类似的车速片段。
通过计算车速片段的平均速度,将其代表的车速片段分为6个状态簇,详细分类规则如表2所示。

表2 车速状态簇分类规则
2.2 工况构建
与短行程方法相比,马尔可夫法利用状态转移矩阵进行车速片段的选择,并不是随机选择[18],本文选择基于马尔可夫链的工况构建方法。但是,所有的工况构建方法无法反映实时的路况。为了实时构建工况,通过多传感器信息融合,获得同一路段、同一时间段车速和交通流量。将获取的数据发送到交通监测系统,由交通监测系统对获取的数据进行整合,再将这些交通数据发送给目标车辆,从而为实时工况构建提供有用的信息。
根据获取的实时交通信息和状态转移矩阵构建实时的全局工况,流程如下:
首先,在构造全局工况之前,将全局工况初始化Cycleg=0,并将选取的公交路线划分为14个路段,从交通监测平台获取每个路段的实时交通信息,发送到目标车辆。
其次,路段的工况是由车速片段组成,根据当前路段平均车速所对应的车速状态簇随机选择一个车速片段作为第一个路段。通过蒙特卡洛方法确定下一个路段的状态q[19],选择状态为q且初始速度与上一路段的末速度值相差小于1 km/h的车速片段作为第2个路段。如果当前路段小于总的路段数,则算法将重复上述步骤构建下一个路段,直到其等于总的路段,将停止构建。此外,应将已使用的车速片段从车速候选集中删除,避免重复使用。
最后,考虑到实际应用中信息传输的局限性,假设获得的交通信息每300 s进行一次更新[20]。根据实时更新的交通数据,从车辆当前位置到终点站每300 s对工况进行重构,重构的过程与前两步相同。
3 结果与分析
基于实车的原始行驶数据构建的全局工况和相应的实际全局工况,如图2a和图2b所示。由图2可知:实际的全局工况的平均速度大于构建的全局工况的平均速度,所以行驶相同的距离,实际工况所用的时间小于构建的工况所用的时间。由图2a可知:构建全局工况的最大车速和平均车速分别为43.62 km/h和18.05 km/h;由图2b可知:实际全局工况的最大车速和平均车速分别为44.37 km/h和19.68 km/h,两种工况主要特征参数的相对误差均未超过10%,基本满足精度的要求。
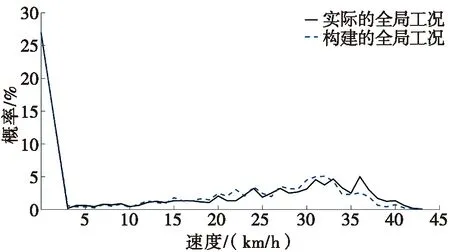
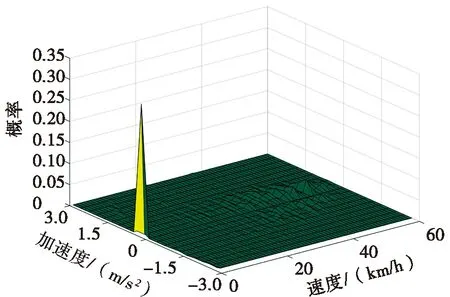
为了验证构建工况的合理性,分别对比构建的工况与实际工况的速度和加速度的概率分布,并利用速度-加速度联合概率分布对构建的工况进行综合分析。图3分别为两种工况的速度、加速度概率分布。由图3可以看出:构建的全局工况和实际的全局工况的速度和加速度概率分布较为吻合。图4a和图4b为实际全局工况和构建全局工况的速度-加速度联合概率分布。从图4a可以看出:构建的全局工况速度分布主要集中在0 km/h与25~35 km/h;加速度较为平缓,主要分布在-1.5~1.5 m/s2,与图4b的状态分布十分相似。因此,所构建的工况具有一定的合理性,在一定程度上能够表征实际道路的行驶工况。
基于实时更新的交通信息,将构建的全局工况每300 s进行一次重构,从而可以更好地反映真实的道路状况。重构后全局工况的对比如图5所示,图5a中从301 s开始的红线为第1次重构的全局工况,与图2a构建的全局工况相比,其具有更高的平均速度,但是总体的趋势相似,因此重构的工况与构建的工况之间具有略微的差异。图5b中从601 s开始的黄线和图5c中从901 s开始的紫线分别为第2次和第3次重构工况,由于道路交通信息没有太大的变化,所以后两次重构工况与第1次重构工况的总体趋势相同,但在第2次和第3次重构工况中停车时间相较于第1次有所减少,因此,第2次和第3次重构工况的时间要少于第1次重构工况的时间。
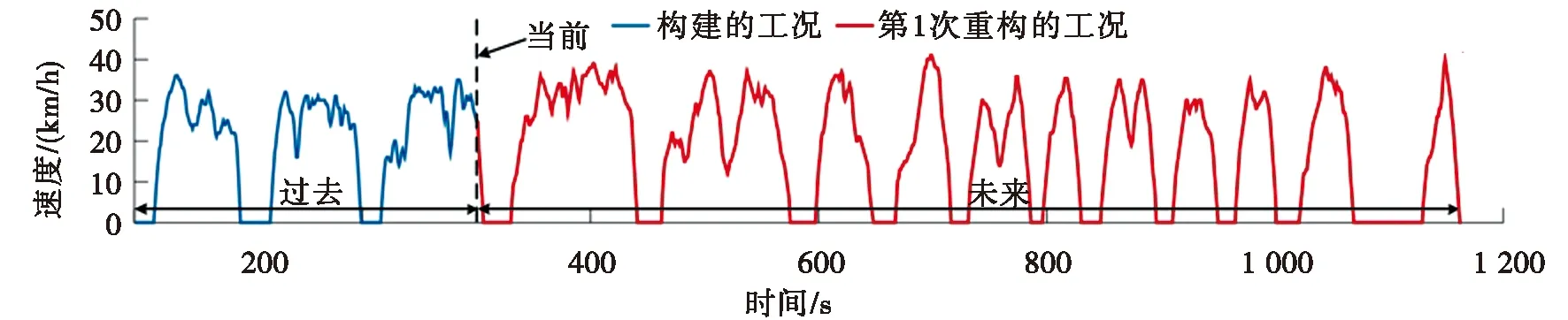
(a) 第1次工况重构
实际的全局工况与基于实时交通信息构建的全局工况的比较如图6所示。由图6可知:与基于原始行驶数据构建的全局工况的行驶时间相比,基于实时交通信息构建的全局工况的行驶时间与实际全局工况的行驶时间相近,且这两个全局工况在加速与减速区间都具有相同的趋势。两种工况具体的特征参数对比见表3。从表3中可以看出:基于实时交通信息构建的工况与实际工况的特征参数的相对误差均在5%以内,相较于基于原始行驶数据构建的全局工况,基于实时交通信息构建的全局工况精度更高,因此,基于实时交通信息构建的全局工况可以更好地反映实际的道路情况。
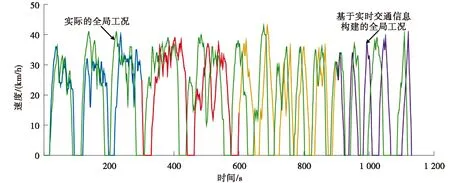
图6 实际的全局工况与基于实时交通信息构建的全局工况对比
车辆在实际行驶过程中驾驶员无法严格按照所构建的工况行驶,因此利用AVL-Cruise建立整车的仿真模型,本文选用一款12 m的PHEB为研究对象,其整车主要技术参数见表4,并联合MATLAB/Simulink软件进行仿真,得到不同行驶工况下的燃油消耗量。原始数据构建的全局工况、基于实时交通信息构建的全局工况以及实际全局工况的百公里燃油消耗量,分别为17.84 L、17.28 L和16.97 L, 基于实时交通信息构建的全局工况的百公里燃油消耗量与实际全局工况更为接近,误差为1.8%,表明基于实时交通信息构建的全局工况可以更好地反映实际道路的行驶状况。
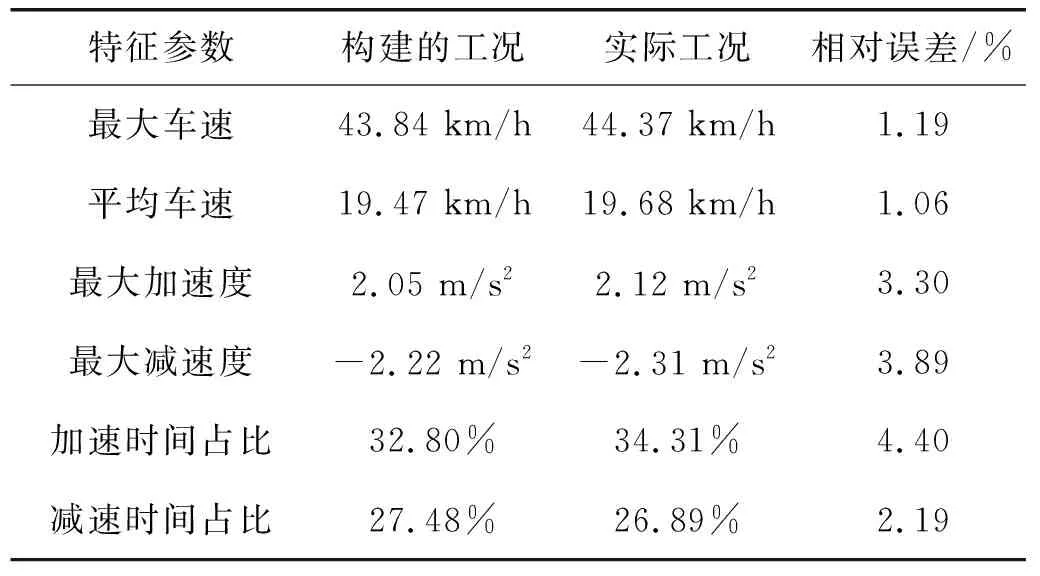
表3 基于交通信息构建的全局工况与实际全局工况特征参数对比
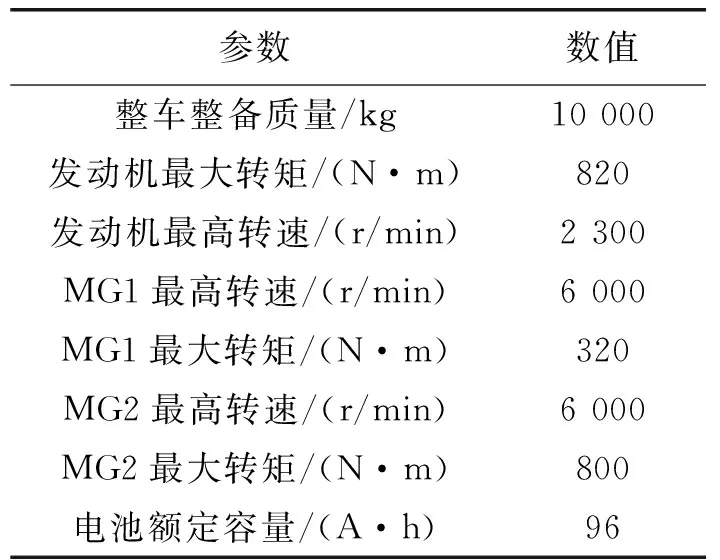
表4 整车主要技术参数表
4 结论
(1)通过车载数据终端采集的原始行驶数据,利用马尔可夫理论构建了PHEB的行驶工况,同时利用车载传感器获取实时道路信息对构建的行驶工况进行重构。
(2)通过分析工况的特征参数和速度-加速度概率分布,与基于原始行驶数据构建的全局工况相比,基于实时交通信息构建的全局工况与实际全局工况更加吻合。通过仿真分析,在3种不同行驶工况下,基于实时交通信息构建全局工况的百公里燃油消耗量与实际全局工况更为接近,相对误差仅为1.8%。因此,基于实时交通信息构建的全局工况可以很好地表征实际道路行驶状况,从而更好地反映整车真实的燃油消耗量。
