地铁隧道结构表面快速检测技术应用研究
2021-05-17
(青岛地铁集团有限公司运营分公司,山东青岛 266000)
截至2019年底,我国40个城市开通城轨交通运营线路共208条,运营线路总长为6 736.2 km,地下线长4 366.5 km,占比64.8%。己投用的隧道结构,由于地质条件不利或施工、设计不合理等因素,隧道结构受到衬砌病害的影响。因此,开展地铁隧道结构表面检测,有利于及时发现病害,防止病害发展[1]。
1 地铁隧道结构表面快速检测技术的发展
当前我国城市轨道交通隧道结构检查仍以人工静态检查为主,存在占用大量人工、检查质量不高的问题。国内外针对隧道结构表面快速检测技术开展了大量的研究和试验,并已进行实践使用。地铁隧道结构表面快速检测技术根据成像方式的不同可分为三维激光扫描、CCD成像扫描。
2 三维激光扫描
2.1 三维激光扫描系统基本原理
三维激光扫描系统以轨道小车为载体,由高精度三维激光扫描仪、GNSS/IMU/DMI组合定位设备、同步控制单位等设备组成[2]。轨道小车推行过程中激光射线与小车前进方向垂直,随着不断推行前进得到螺旋线状的扫描点,同步技术将扫描点云与下车位置数据进行实时同步,实现隧道结构的三维重建[3]。使用软件处理点云数据得到高清晰度灰度图和断面图,通过分析灰度图、断面图得到隧道结构渗漏水、裂缝和收敛等信息。
三维激光扫描系统主要技术指标如表1所示。
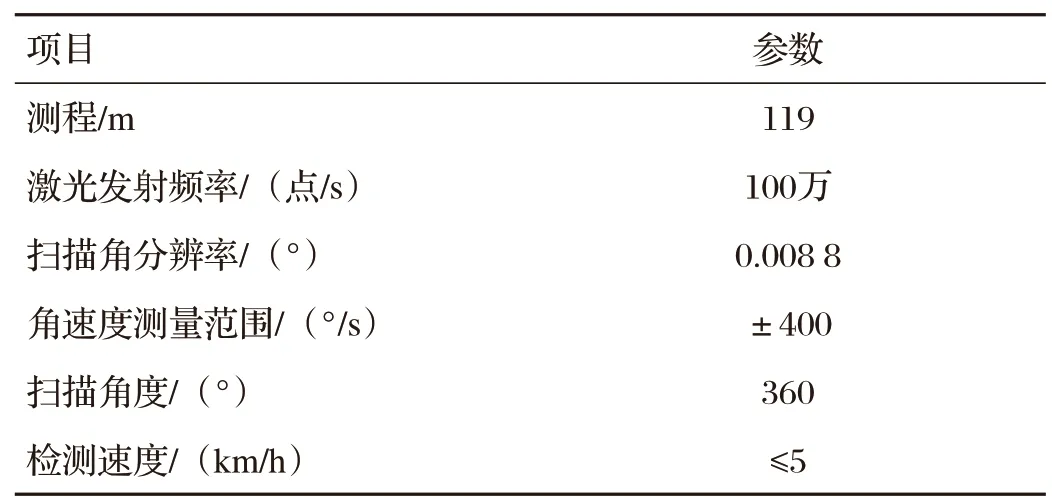
表1 三维激光扫描系统主要技术指标表
2.2 作业流程
2.2.1 外业数据采集
(1)硬件调试。包括高精度移动测量系统安装调试、硬件设备的检查、惯导校准等。
(2)采集参数设置。轨道小车行驶速度控制在5 km/h以内;扫描频率为1 000 kHz;扫描仪转速为200 r/s;编码器转1 000个脉冲。
(3)采集作业操作流程。①组装扫描设备,设备电源上电,开机连接设备WiFi;②打开采集软件,完成惯导的初始化,扫描仪旋转稳定后(点云数据开始增长),人工平稳推进,直至到达采集目的地,设备停稳后,结束测站;③保证设备静止,点击“结束工程-静止”,设备静止5 min,完成后可进行设备掉头、更改采集线路等操作,如果已经完成采集任务,先点击“关闭设备”,等待2 min,再进行设备断电操作。
2.2.2 内业数据处理
使用专用软件对点云数据进行处理,得到高清晰度灰度图和深度图,通过对图像分析得到隧道结构的渗漏水、裂缝、破损检测、结构直径分析和横断面分析等。
2.2.3 数据分析成果
(1)隧道高清晰度灰度图成果。
隧道正射灰度影像将足够密度的点云数据进行栅格化,以特定步长的栅格对点云进行划分,并为每个栅格设置其行列值,将该栅格内点的强度平均值作为该栅格的灰度值,因此,栅格为对应图像中的特定像素,实现点云到图像的转化。由于激光对混凝土与水的反射率不同,在灰度影像图中渗漏水区域为明显不规则黑色部分,在灰度图中可识别渗漏水、结构裂缝[4]。
(2)隧道断面图成果。
利用点云数据对隧道断面结构进行提取,并在特定里程处导出该处的断面点云,得到该断面的轮廓CAD图,如图1所示。

图1 地铁隧道结构断面图
3 CCD成像扫描
3.1 CCD成像扫描系统基本原理
CCD成像扫描系统通常以工程车为载体,由惯导及测距模块、状态指示模块、存储单元、定位模块、高清成像模块、高亮补光模块等组成。在工程车行驶过程中不断快速拍摄,得到隧道结构表面图像,运用图像处理、计算机深度学习等技术判断隧道结构渗漏水、裂缝、破损情况。
CCD成像扫描系统性能指标如表2所示。

表2 CCD扫描系统主要技术指标表
3.2 作业流程
作业的主要流程分别为相机参数调整、相机标定、数据采集和数据检查。
(1)根据隧道结构尺寸,拟定采集参数,进行相机对焦,使相机视场中央及边角图像清晰。
(2)相机标定分为尺寸标定和三维标定。
尺寸标定:将裂缝尺贴在标定板上,紧贴在两侧相机视场中央的隧道壁处,使用相机拍摄并记录,拍摄结果保证0.2 mm刻度清晰可见。
三维标定:拍摄不同角度的标定板照片及标定板中方格清晰可见,标定人员手指没有侵入方格。
(3)标定完成后即可正式采集,采集过程中车速控制在30~35 km/h,到达预先设定终点即可。
(4)采集完成后检查数据,检查相机采集帧数是否一致,并随机从采集文件中抽取数张照片查看细节是否清晰。
3.3 数据分析成果
使用服务器对采集的隧道结构表面图像进行智能分析,形成包含结构表面裂缝、渗漏水、剥落情况的报告。选取地铁部分区间隧道系统生成的报告进行人工复检,得出CCD成像扫描系统对裂缝、渗漏水的检出率为100%,剥落检出率为100%,但存在将结构修补误判为剥落的情况。后续系统通过结构病害大数据学习,提升对结构病害的识别,以减少误判。CCD成像扫描系统渗漏水病害检测如图2所示。
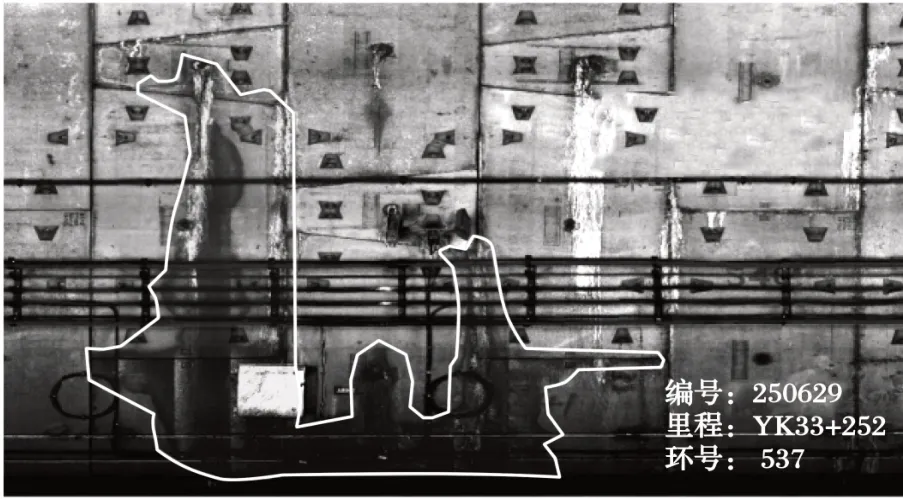
图2 CCD成像扫描系统渗漏水病害检测图
4 三维激光扫描技术和CCD成像扫描技术的优缺点
三维激光扫描技术的缺点:(1)大量的点云数据需求和设备对振动控制的要求,限制了轨道小车的速度,速度控制在5 km/h以下;(2)图像分辨率较低,如瑞士AMBERG技术公司开发的GRP5000检测系统,该检测系统采集的图像分辨率仅为5 mm/dpi。
三维激光扫描技术的优点:(1)设备精确度高,可准确得到隧道错台、渗漏水、裂缝等表观病害情况,并能够对隧道结构断面进行精准测量,形成隧道收敛成果,代替传统断面收敛检测;(2)设备体积小,功率小,不需要占用行车作业点,具有机动灵活、适应环境强等优点。
CCD成像扫描技术缺点:(1)设备体积大,需要使用工程车进行拖挂并提供电力,占用行车作业点;(2)数据量较大,每公里隧道形成数据约0.5 TB,占用大量存储资源。
CCD成像扫描技术优点:(1)检测速度快,检测速度约30~35 km/h,可快速完成城轨线网级检测;(2)检测图像清晰,可准确反映渗漏水、裂缝、剥落等隧道表观病害。
5 结语
根据地铁现场使用和试验的情况可知,三维激光扫描技术和CCD成像扫描技术均具有较高的准确率,可满足隧道表面快速检测的需求,但根据成像原理的不同,两种技术有不同的优缺点及不同的使用场景。CCD成像扫描技术适用于城轨隧道结构全线检测,建立全寿命周期的成长健康状况“档案馆”,为轨道隧道运营提供病害预警。三维激光扫描技术适用于小范围隧道结构检测,如检测地区范围内施工对既有地下隧道结构的影响。