基于负载摆动状态估计的双摆型吊车滑模控制
2021-05-17肖友刚朱铖臻李蔚谢劲松
肖友刚,朱铖臻,李蔚,谢劲松
(1.中南大学交通运输工程学院,湖南长沙,410075;2.中南大学轨道交通安全关键技术国际合作联合实验室,湖南长沙,410075)
欠驱动吊车具有强大的转运能力,在建筑、港口、货仓、车间等场所的物流中起到了非常重要的作用。然而,外界扰动、吊车启停、速度变化等都会使负载摆动,不仅使吊车的输运效率降低,而且还带来巨大的安全隐患。为了解决这一问题,学者们将吊车简化为单摆,提出了许多抑制负载摆动的方法[1-10]。然而,若吊车输运的负载体积大或吊钩质量不可忽略,则吊钩会绕台车摆动,负载会绕吊钩摆动,呈现出复杂的双摆现象。双摆效应使系统运动维数增加,欠驱动性更强,消摆难度增加。目前,已有学者针对双摆吊车提出一些控制方法,如:SINGHOSE等[11]利用输入整形法生成台车轨迹,并设计跟踪控制器对该轨迹进行跟踪,实现了台车定位和负载摆动抑制。TANG等[12]针对台车运动和环境风而引起的荷载摆动,提出利用一个轨迹抑制由台车运动引起的摆动,另一个轨迹抑制环境风引起的摆动,形成了2种运动轨迹相结合的控制方法。陈鹤等[13]考虑双摆吊车工作过程中的各种物理及安全约束,构造了以优化运送时间的优化函数,利用高斯伪谱法将带约束的优化问题转化为具有代数约束的非线性规划问题。ZHANG 等[14]在台车定位参考轨迹中引入消摆环节,并通过线性组合得出了台车加速度轨迹,实现了台车位置一、二级摆动的控制。孙宁等[15]考虑系统安全性及台车运动等物理约束,通过构造平坦输出信号,将双摆吊车的状态约束转化为对平坦输出的约束,提出了带有状态约束的双摆吊车最优轨迹规划方法。MASOUD 等[16-17]基于双摆吊车系统第一阶模态设计了基础整形器,通过积分反馈控制消除了由第一阶模态引起的残留摆动,并将基于闭环系统的第一阶摆动频率的输入整形器和虚拟反馈控制环节结合,提出了双摆吊车定位消摆控制的频率调制输入整形法。QIAN 等[18]为抑制双摆桥式吊车摆动,提出了一种基于单输入规则模块的模糊控制器。OUYANG等[19]基于线性矩阵不等式,提出了一种简易鲁棒控制器抑制双摆桥式吊车的摆动。ZHANG 等[20]利用能量整形的思想,设计了一种带有跟踪误差约束的自适应跟踪控制器,在系统参数不确定以及外部扰动下仍能保证系统的渐近跟踪性能。TUAN等[21]提出了1 个传统滑模控制器和1 个多层滑模控制器,来解决双摆桥式吊车的定位消摆问题。SUN等[22-23]提出了一种饱和非线性输出反馈控制器和一种非线性准PID控制器,来解决双摆桥式吊车的摆动问题。ZHANG 等[24]通过引入一个广义的信号,提出了一种有初始输入约束的能量耦合控制方法,可精确地驱动台车至目标位置,快速地抑制并消除吊钩及负载摆动。孙宁等[25]为了使双摆吊车在快速精准定位的同时抑制摆动,提出了一种基于超螺旋的光滑鲁棒控制算法。彭海军等[26]分析了不确定性对双摆吊车轨迹规划的影响,提出一种基于Chebyshev代理模型的双摆吊车不确定性轨迹规划求解方法。OUYANG 等[27-28]针对桥式吊车、旋转起重机的定位和摆动抑制问题,提出一种新型滑模控制算法。ZHANG[29]将滑模控制和PD控制复合,构造了双摆桥式吊车耦合增强型PD滑模控制。然而,已有双摆型吊车系统均需要利用所有系统状态的实时反馈信息进行控制,虽然实验条件下通过特殊设计能够满足要求,但在实际运行中,吊车的负载摆动很难通过安装传感器直接测量。针对这一问题,本文作者对双摆型吊车的动力学模型进行变换,得出2 个摆角之间的耦合关系,进而设计一种线性扩张状态观测器(LESO),通过该LESO利用吊钩摆动、控制量以及模型信息观测负载摆动,用负载摆动的估计值代替实际值,反馈到滑模控制器中,得到双摆型吊车消摆定位控制器,并对控制器的稳定性进行严格的数学证明。
1 双摆吊车系统动力分析
图1所示为双摆型吊车的示意图。从图1可以看出:台车沿导轨运动,为可驱动部分;吊钩和负载为欠驱动部分,台车利用吊绳将负载输送到目的地。在台车启停、加减速过程中,吊钩会绕台车摆动,负载会绕吊钩摆动,呈现复杂的二级摆效应,严重影响吊车的作业效率和安全性能。双摆型吊车动力学模型如下[21,24]:

其中:M,m1和m2分别为台车、吊钩、负载的质量;β为吊钩的垂向摆角,通过编码器测得;φ为负载的垂向摆角,实际中难测;l1为吊绳长度;l2为吊钩与负载重心之间的距离;g为重力加速度;Ft为台车驱动力,x为台车位移;Fr为台车摩擦力,εx和kr为与摩擦力相关的系数。

图1 双摆型吊车系统示意图Fig.1 Schematic diagram of double-pendulum crane
考虑到实际作业过程中一、二级摆角通常都在10°以内,有cosβ≈1,cosφ≈1,cos(β-φ)≈1,sinβ≈β,sinφ≈φ,≈0,≈0。
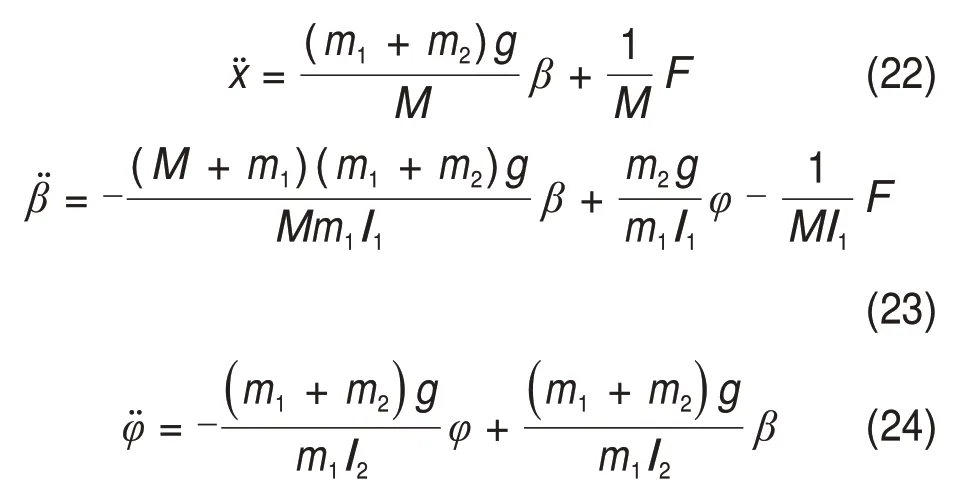
对式(1),(2)和(3)在β=0°和φ=0°时进行线性化处理,并令F=Ft-Fr,得到双摆吊车的近似线性模型:

将式(4)两端乘以l1并与式(5)相减可得

将式(6)两端乘以l1,式(5)两端乘以l2,再者相减可得

将(7)代入(8)并化简可得

2 双摆型吊车扩张状态观测器设计及稳定性证明
为了提升双摆型吊车的控制效果,设计扩张状态观测器,对负载摆角的状态进行观测。令β=θ1,对式(9)进行扩张,得


根据式(11)设计线性扩张状态观测器(LESO):

定义向量e为向量θ的观测误差,e=则e1=θ1-z1,e2=θ2-z2,e3=θ3-z3。由式(11)和式(12)得观测的误差方程:

令Y1=e1,Y2=-3ω0e1+e2,Y3=-3ω0(-3ω0e1+e2)+(-3ω02+m)e1+e3,则误差方程更新为

令a=3ω0,b=3ω20,c=ω30,即=-cY1-bY2-aY3+θ3,因此,式(14)的特征方程为

由Hurwitz 条件可知,其特征根具有负实部的充要条件为:a>0,b>0,c>0,ab-c>0。
令W=-(ab-c)Y22/2,根据巴尔巴辛公式,得误差系统的Lyapunov函数V:

由ab-c>0可得则


对式(17)求导后,将式(14)代入,得

因此,V正定,当θ3为0 时,<0,LESO 在以e1=0,e2=0,e3=0 为平衡点的大范围内渐进稳定。当θ3≠0时,假定|θ3|≤η(η为正常数)。当系统稳定时,有

根据式(13)可得误差范围为

因此,只要使ω0≫η,则e1≈e2≈e3≈0,即

3 二级摆型吊车消摆滑模控制器设计
对式(4),(5)和(6)进行整理可得:
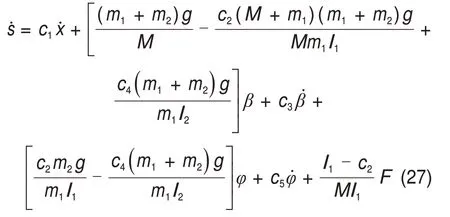
令ex=x-pd,定义滑模面为

其中,c1,c2,c3,c4和c5为待整定系数。对滑模面s求导可得

将式(22),(23)和(24)代入式(26)可得
令=0,则可求得驱动力F:

在式(28)中加入以滑模面s为基础的切换函数ξsgn(s)(其中ξ为正数),则控制律可更新为

由于符号函数不连续,式(29)所示的控制器会导致系统抖振,因此,采用双曲正切函数代替符号函数,得到修正的双摆型吊车控制器C1:

将控制系统的Lyapunov函数V1定义为

显然V函数是正定的,对式(31)关于时间求导可得

将控制律(30)代入式(27)可得

将式(33)代入式(32)可得

因此,所设计的控制系统是渐进稳定的。
4 仿真结果及分析
为验证本文所设计的LESO的有效性以及将其反馈到控制器后的控制效果,将本文提出的基于负载摆动状态观测的双摆型吊车控制器C1 与文献[24]提出的基于能量耦合的双摆型吊车控制器C2、文献[21]提出的双摆型吊车滑模控制器C3 进行仿真对比。仿真中,M=20 kg,m1=1 kg,m2=5 kg,l1=2 m,l2=0.4 m,g2=9.8 m/s2,frox=8,εx=0.01,kr=-1.2,台车期望目标位置pd=2 m。对参数经过充分整定,C1 的控制参数为C1=0.60,C2=0.45,C3=5.12,C4=-0.04,C5=-1.78,。
文献[24]提出的基于能量耦合的双摆型吊车控制器C2数学表达式为

其中:ξx=ex+λ1sinβ+λ1sinφ;ex=x-pd。对应的整定参数为kp=12,kd=30,λ1=-6,λ2=-1。
文献[21]提出的CSMC 双摆型吊车控制器C3数学表达式为

其中:sat(s)为饱和常数;s为滑模面,s=+λ(x-pd)+aβ+bφ。对应的整定参数为λ=0.5,a=17,b=-11,K=90。
3 种控制器的控制性能比较见表1。通过对比表1中3种控制器的性能发现:在控制器调整时间相差不大(1 s内)的情况下,本文所提方法控制的吊钩最大摆角、负载最大摆角都比其他2 种方法的小,吊钩最大摆角仅为1.21°,负载最大摆角仅为1.20°,且基本无残余摆动,吊钩与负载的残余摆角仅分别为0.07°和0.05°;虽然台车调整时间略比其他2种方法的高,但台车最大驱动力比其他2种方法的少很多,仅为13.11 N,说明对执行器的驱动功率要求低,能耗少。因此,将LESO的观测结果反馈到滑模控制中,可以取得较好的控制效果,也说明LESO的观测结果准确、可靠。

表1 3种控制器的控制性能比较Table 1 Control performance comparison of three controllers
为了验证所提算法的鲁棒性,设计4组仿真实验,其中,前3组实验分别变化负载质量、吊绳长度、目标位置,已整定的控制参数和其他模型参数均保持不变,第4 组实验所有的参数都保持不变,只施加扰动。
在负载质量m2分别为1,3 和5 kg 时,所提算法的控制结果如图2所示。从图2可以看出:台车在8 s 内都到达了目标位置且无任何超调,说明负载质量变化对台车定位和调整时间几乎没有影响;随负载质量增加,吊钩、负载摆动幅度略减少,但基本可以忽略,且吊钩、负载摆动时间几乎不变,台车驱动力变化幅度也不大,说明在质量发生变化时,控制器C1对质量变化不敏感。

图2 不同负载质量下所提方法的控制结果Fig.2 Control results for proposed method with different playload masses

图3 不同绳长下所提方法的控制结果Fig.3 Control results for proposed method with different rope lengths
在吊绳长度l1分别为1,2和4 m时,所提算法的控制结果如图3所示。从图3可以看出:当绳长取不同值时,到达目标位置的时间几乎不变,均在8 s 内稳定;随摆长增加,摆动幅度略有增大,但变化幅度在0.1°以内,可以忽略不计;摆动稳定时间也均在8 s 左右,在整个过程中驱动力变化不大,最大值不超过14 N,均在合理范围以内,说明所提算法在摆长发生变化时,鲁棒性较好。
为了验证算法在不同距离下的控制效果,设计了如下仿真实验,台车目标位置pd分别为1,2,3 和4 m,仿真结果如图4所示。从图4可以看出:台车均可到达不同指定目标位置,且无任何超调;随目标位置增大,摆动幅度增加,但吊钩、负载在整个过程中的摆动幅度都不超过2°;在台车到达目标位置后无残余摆动,驱动力随定位距离增加虽有所增大,但增加幅度很小,说明所提方法在执行器功率有限的情况下,可以适应比较宽的作业范围,有利于发挥吊车的效能。

图4 不同目标位置下所提方法的控制结果Fig.4 Control results for proposed method with different desired situations
为了验证算法的抗干扰能力,针对负载在9 s时施加脉冲干扰、15~16 s 时施加正弦干扰,幅值均为2°。不同干扰下的控制结果如图5所示。从图5可以看出:在施加干扰之后,扰动可快速消除,并且摆角最大幅度均在2°以内,说明本算法的抗干扰能力较强。

图5 不同干扰下所提方法的控制结果Fig.5 Control results for proposed method with different disturbances
5 结论
1)利用吊钩摆角与负载摆角之间的耦合关系设计的LESO能够对负载摆角进行有效观测,能够代替传感器的实测值对双摆型吊车进行反馈控制,克服了已有双摆型吊车控制中需要安装传感器的弊端,减少了控制装置的复杂度,更有利于工程实际应用。
2)将LESO对负载摆动的估计值反馈到滑模控制器中,形成了吊车消摆定位控制器,并采用Lyapunov 方法证明了该控制器的渐进稳定性。控制器在负载质量、绳长、台车位置变化情况下都具有很好的消摆定位性能,且台车驱动力、吊钩及负载摆动都比其他2种对比方法好,说明所提方法在执行器功率有限的情况下,可以适应比较宽的作业范围,有利于发挥吊车的效能。
3)在不同外界扰动作用下,所提方法都能很快消除其对吊车消摆定位的影响,鲁棒性良好。