节点运动对多AUV协同系统全网完成度的影响
2021-05-15梁庆卫闫晓航
梁庆卫, 张 鑫, 闫晓航
节点运动对多AUV协同系统全网完成度的影响
梁庆卫, 张 鑫, 闫晓航
(西北工业大学 航海学院, 陕西 西安, 710072)
多AUV协同系统(MAUVS)具有作业范围广、功能强、工作效率高等特点。面对复杂的海洋环境,系统节点在执行任务过程中需要调整自己的运动状态, 运动状态的改变会导致节点间通信距离发生变化, 并产生多普勒频移, 影响协同系统通信性能。基于此, 文中从拓扑结构出发, 考虑误码率和水下通信的时延特性, 提出使用全网完成度来描述系统通信性能的可靠性, 并给出全网完成度的计算方法。通过算例分析了不同运动状态下通信距离变化对通信链路的影响, 给出了节点运动对MAUVS全网完成度的影响, 从一定程度上证明了全网完成度描述MAUVS通信网络可靠性的合理性。
多AUV协同系统; 节点运动; 可靠性; 全网完成度
0 引言
自主水下航行器(autonomous undersea vehicle, AUV)是海洋探测与开发中不可缺少的重要工具[1-2]。由于单个AUV已不能满足日益多样化、复杂化和精确化的任务, 此时就需要由多种AUV组成的AUV群即多AUV协同系统(multiple autonomous undersea vehicle system, MAUVS)进行协同工作。
随着MAUVS更多地投入实际应用, 其可靠性研究显得越发重要[3]。目前关于MAUVS可靠性的研究较少且多为网络节点可靠性的研究。戴伏生[4]引入一个归一化容量加权通信网络可靠性指标, 将网络连通性和传输容量综合在一起, 分析了网络的可靠性能和节点、链路对网络的重要性。何明[5]提出了一种MANET Routing Reliability算法, 将网络可靠性与移动路由因素相结合。李浩等[6]针对水面舰艇协同系统网络, 归纳了其随机网络拓扑结构的特点。
MAUVS在完成任务过程中, 单个AUV节点处于时变状态, 节点运动状态的不断变化会导致节点间的通信距离发生变化, 同时引起多普勒频移[7-8]。多普勒频移是水声信道的一个重要特性, 它的产生与收发机的相对速度和海水介质的运动等因素有关。MAUVS在进行水下通信时, AUV节点间的相对运动会导致收发双方在数据接收端产生多普勒频移, 多普勒频移对数据帧在时域上产生展宽或压缩的影响在接收端将严重恶化接收机的载频跟踪和相位符号的同步, 从而导致误码率增大, 最终影响系统的可靠度。文中在多AUV构成的网络通信拓扑结构基础上, 从水下通信链路的误码率和时延特性出发, 采用有效性指标——全网完成度描述协同系统通信网络的可靠度, 分别研究了当AUV节点处于匀速、匀加速和匀减速状态时, 节点运动状态的变化所引起的相对距离变化对MAUVS可靠性的影响。
1 全网完成度
MAUVS的通信能力是保障系统协同工作的重要条件。在水下通信网络中, 误码率和通信时延表现得尤为明显, 对MAUVS通信性能的可靠性具有重要影响。全网完成度[9]是协同系统在指定的时间内完成特定通信业务性能要求的量度[10]。从网络性能出发, 把传输时延作为研究网络可靠性的出发点, 综合误码率构成的通信链路可靠度, 利用信息流量对全网进行加权平均, 充分反映了网络在通信时的时延特性。
1.1 基本概念


MAUVS在进行水下通信时, 节点间相对运动会出现多普勒频移, 会影响节点间通信链路可靠度, 然而在研究基于时延的全网完成度时, 多普勒频移还会影响数据的传输时延[12], 表示为

则基于时延的全网完成度[14]为
该指标利用传输时延和误码率计算MAUVS网络可靠性, 并以业务到达率对全网进行加权, 充分反映了网络在失效环境中的时延特性。
1.2 计算步骤
全网完成度在固定拓扑结构下的计算流程图如图1所示。
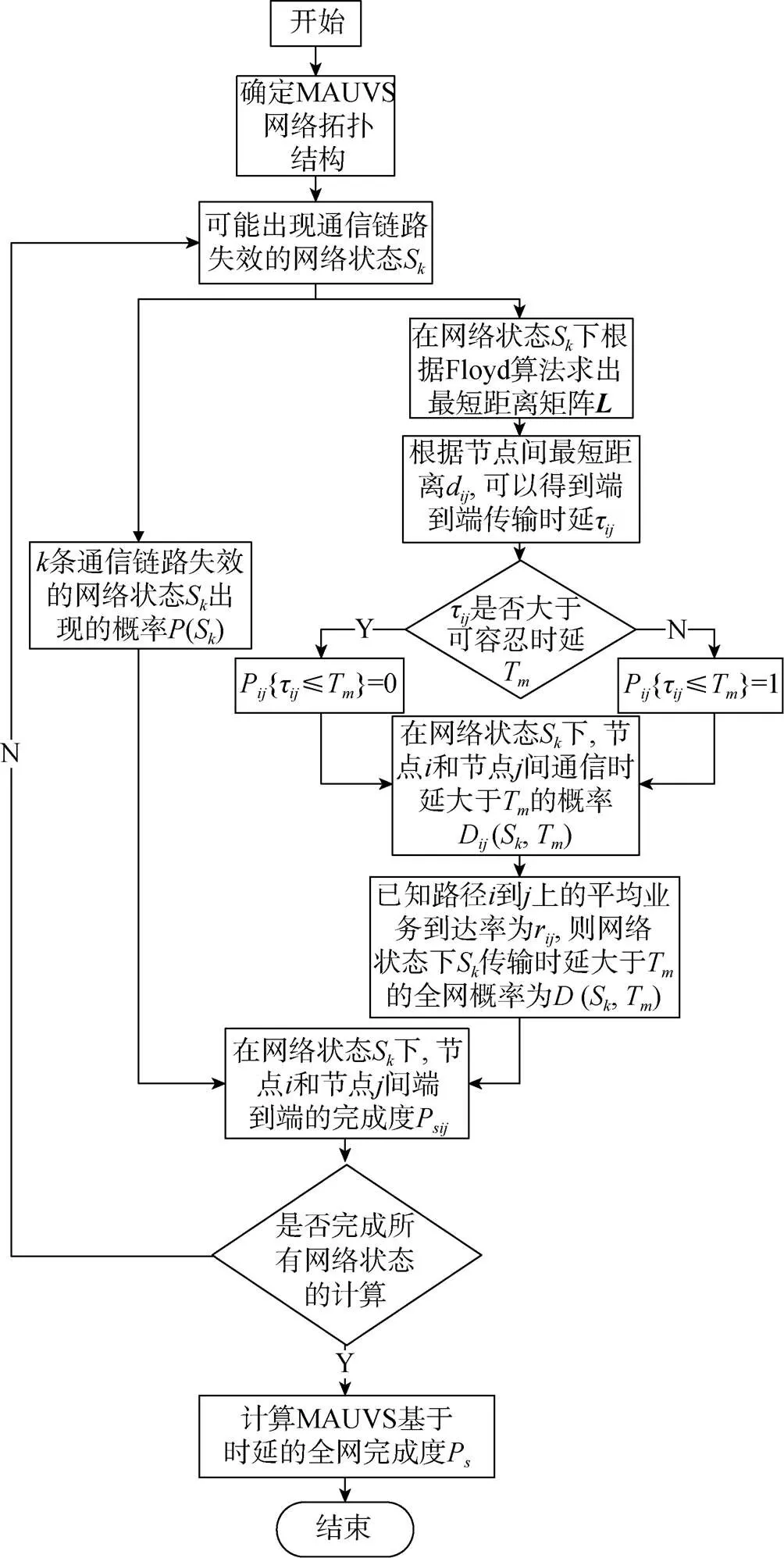
图1 全网完成度计算步骤
1) 确定MAUVS网络拓扑结构模型;
2 实例分析
根据全网完成度的计算方法可以看出, 要研究节点运动状态变化对全网完成度的影响, 需要先确定MAUVS的拓扑结构。

图2 MAUVS拓扑结构
假设MAUVS所处的海洋环境为理想状态, 满足:
1) 单体AUV节点都可靠且通信半径相同;
2) AUV间的通信相互独立且各条通信链路是否失效相互独立;
3) 海洋环境恒定且温度为277 K;

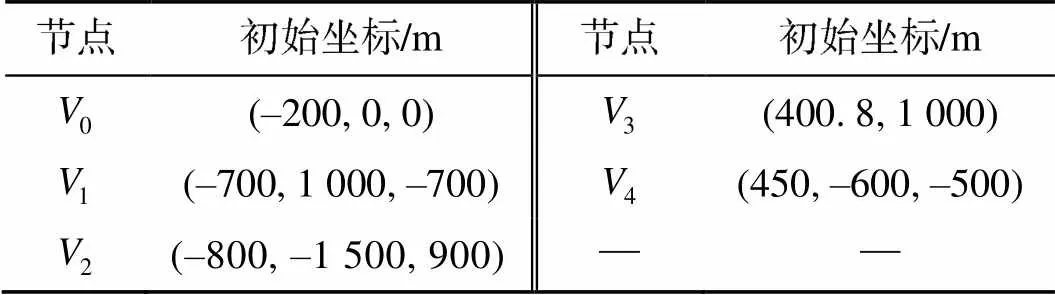
表1 AUV初始位置
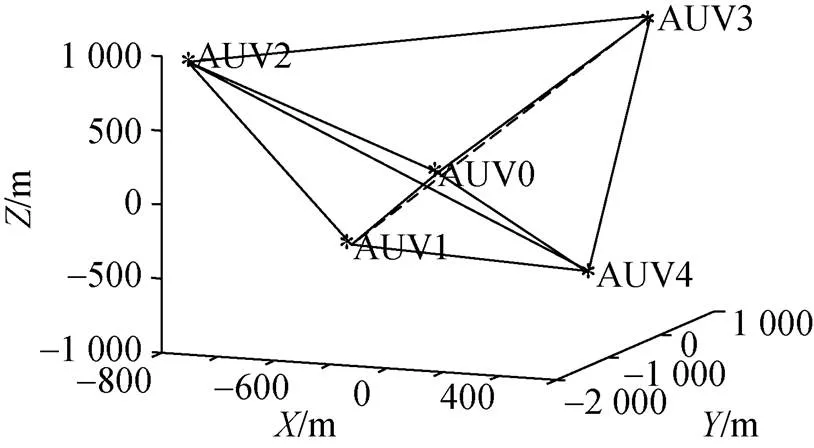
图3 AUV部署图
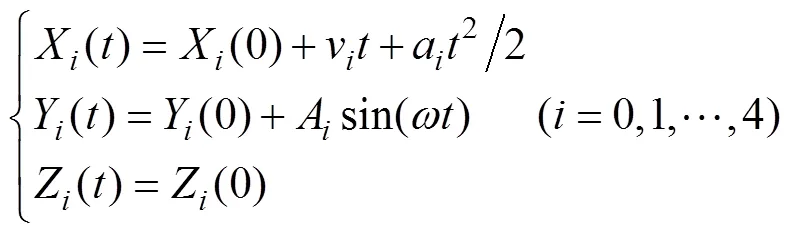
式中: v为初速度;a为加速度。
为使分析结果更全面, 算例设定各AUV节点的运动状态各不相同, 有加速、匀速和减速3种状态, 在任务执行过程中, 拓扑网络一直处于动态变化中, 各节点间的通信距离均呈现由短变长再变短的趋势, 且成对存在通信距离基本保持一致的节点, 充分反映了拓扑网络节点运动对全网完成度的影响。
对不同运动状态下MAUVS全网完成度的变化趋势进行研究, 假设各节点的运动状态如表2所示, 则根据式(9)计算得到各AUV运动轨迹图如图4所示。
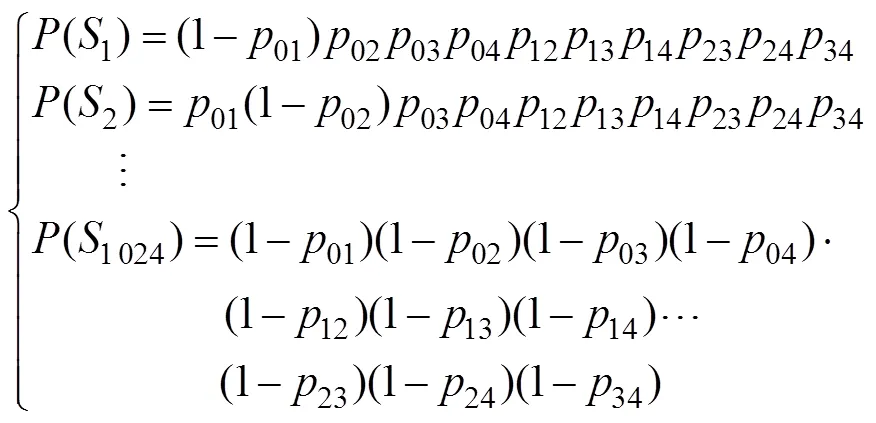
由图2可看出网络中共有10条通信链路, 即有210个网络状态。系统可能出现的网络状态的概率为

表2 运动状态
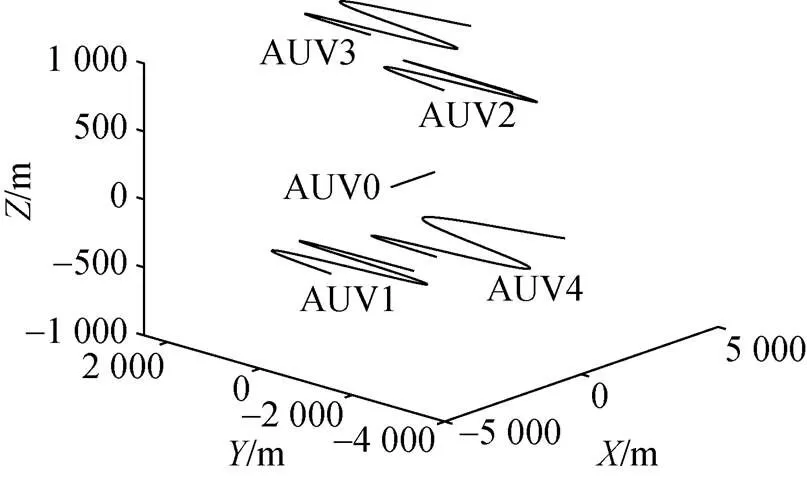
图4 AUV轨迹
根据式(9)和图4可得节点间通信距离的变化趋势如图5所示。
从图5中可以看出, 随着节点周期性运动, 大部分节点间的通信链路距离出现S型变化趋势, 且随着时间推移, 由于节点内有加速和减速运动的AUV节点, 节点间的通信距离在后期变化也越来越快。
已知节点运动状态的变化会影响节点间通信距离的变化和多普勒频移的产生, 随之会影响节点间通信误码率的变化和通信链路的可靠度。根据通信距离对误码率影响和多普勒频移对误码率影响的关系可以得出, 随着5个AUV节点运动状态变化, 节点间误码率变化趋势如图6所示。

图6 节点间误码率变化趋势
对比图5和图6可以看出, 节点间误码率变化趋势与节点间通信距离变化趋势基本相同。可见在节点运动过程中, 通信距离对误码率的影响要远大于多普勒频移对误码率影响。通过节点0~3间通信误码率曲线和节点1~2间误码率曲线可以看出, 在通信距离较短时, 多普勒频移对误码率影响较大。
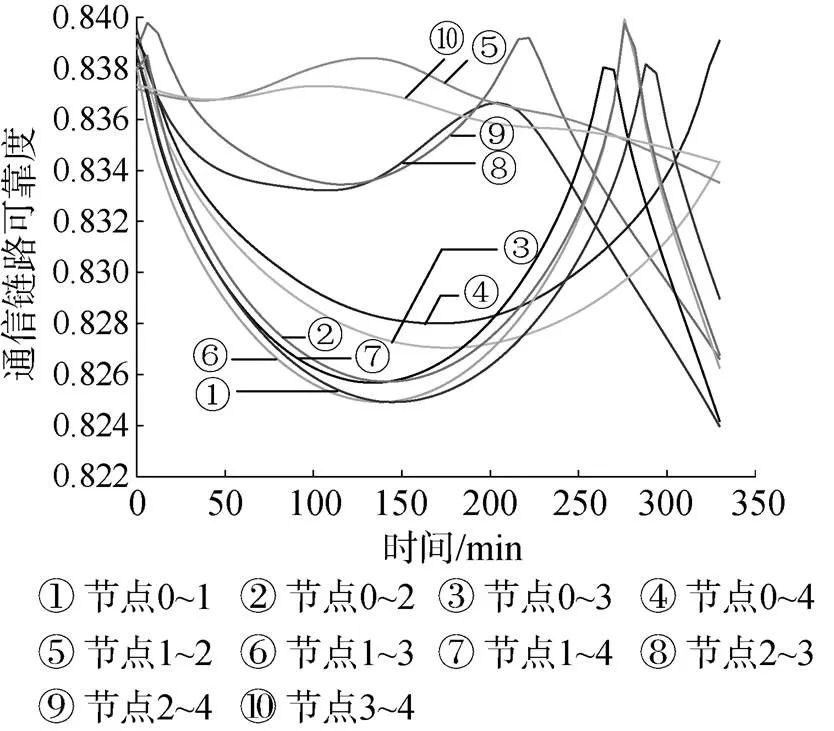
图7 节点间可靠度变化趋势
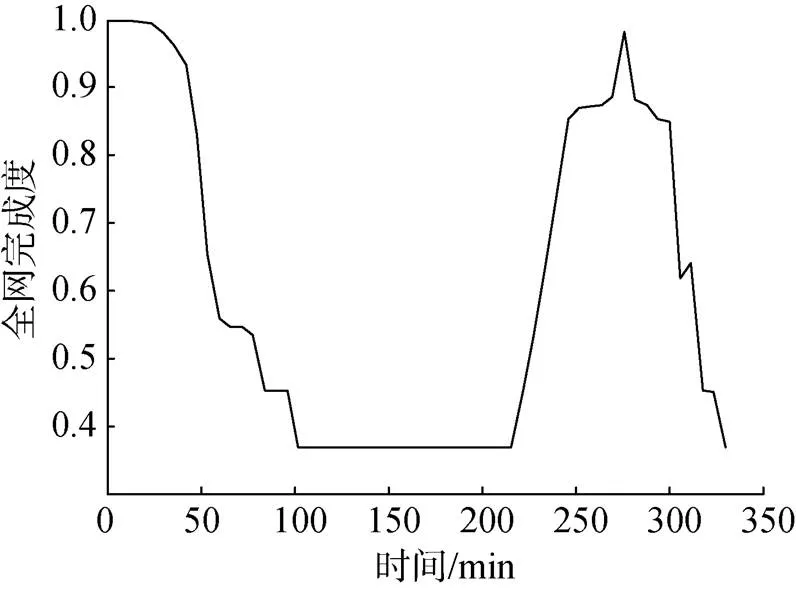
图8 时变运动状态下MAUVS全网完成度变化趋势
3 结束语
MAUVS在进行水下任务时, 节点运动引起的节点间通信距离的变化和多普勒频移会对传输时延和业务到达率造成影响, 最终影响系统的全网完成度。文中给出了传输时延和误码率的水下拓扑网络全网完成度的计算方法, 并通过全网完成度分析了节点处于匀速、匀加速、匀减速状态下运动时引起的节点间通信距离变化和多普勒频移对多AUV协同系统可靠度的影响, 表现为若节点运动引起节点间通信距离和多普勒频移的增大, 会导致节点间通信误码率升高, 从而使节点间通信链路可靠度降低。同时, 多普勒频移还会影响节点间通信传输时延, 最终会导致MAUVS的全网完成度下降; 反之, 若节点运动引起节点间通信距离和多普勒频移的下降, 则系统的全网完成度会升高。
水下通信链路的可靠性除了受节点间通信距离和多普勒频移的影响外, 还受外部噪声谱级的影响。文中将3个因素纳入全网完成度指标中, 主要分析了节点运动所引起的通信距离变化和多普勒频移对全网完成度的影响。在之后的研究中, 需结合任务环境, 对噪声谱级及其影响分析进行研究。
[1] Ren J, Luo X. Analysis on the Development of Autonomous Underwater Vehicle Equipment in the Deep Sea[J]. International Core Journal of Engineering, 2020, 6(1): 231-235.
[2] 王童豪, 彭星光, 潘光, 等. 无人水下航行器的发展现状与关键技术[J]. 宇航总体技术, 2017(4): 52-64. Wang Tong-hao, Peng Xing-guang, Pan Guang, et al. Development and Key Technologies of Unmanned Underwater Vehicles[J]. Astronautical Systems Engineering Technology, 2017(4): 52-64.
[3] Liang Q W, Sun T Y, Wang D D. Reliability Indexes for Multi-AUV Cooperative Systems[J]. Journal of Systems Engineering and Electronics, 2017, 28(1): 179-186.
[4] 戴伏生. 通信网络各节点和链路重要性的客观评估方法[J]. 南京理工大学学报: 自然科学版, 2006, 30(6): 749-751.Dai Fu-sheng. Objective Evaluation Method of Significance of Nodes and Links in Communication Network[J]. Journal of Nanjing University of Science and Technology (Natural Science), 2006, 30(6): 749-751.
[5] 何明, 裘杭萍, 胡爱群, 等. 移动Ad Hoc网络的可靠性评价方法[J].计算机工程, 2009, 35(20): 126-127. He Ming, Qiu Hang-ping, Hu ai-qun, et al. Method for Evaluating Reliability of MANET[J]. Computer Engineering, 2009, 35(20): 126-127.
[6] 李浩, 王公宝. 关于水面舰艇编队防空队形的优化研究[J]. 舰船科学技术, 2009, 31(5): 109-112.Li Hao, Wang Gong-bao. Optimum Selection in Warship Formation for Air Defense[J]. Ship Science and Technology, 2009, 31(5): 109-112.
[7] 孙慧嵩. 移动水声FH-FSK通信技术研究[D]. 哈尔滨:哈尔滨工程大学, 2019.
[8] Stéphane I, Ansel G, Laot C. Frame Detection and Synchronization for a SIMO Receiver in Presence of Doppler Shift for Underwater Acoustic Communications[C]// Oceans 2019. Marseille, France: IEEE, 2019.
[9] Kyandoghere K. Survivability Performance Analysis of Rerouting Strategies in an ATM/VP DCS Survivable Mesh Network[J]. Computer Communication Review, 1998, 28 (5): 22-49.
[10] Michiaki H, Kazuho O, Hideaki T. Highly Reliable Optical Bidirectional Path Switched Ring Networks Applicable to Photonic IP Networks[J]. JLT, 2003, 21(2): 356- 364.
[11] Liang Q, Ou J, Yan X, et al. Effect of Nodes Movement on All-terminal Reliability of Multi-AUV Cooperative System[C]//Oceans 2018 MTS/IEEE. Charleston: IEEE, 2018: 1-6.
[12] 李云飞. 基于Zadoff-Chu序列的水声通信同步算法[D]. 上海: 上海交通大学, 2018.
[13] Thorne R E. Hydroacoustics[J]. Fisheries Techniques, 1983: 239-259.
[14] Bonaventura V, Cacopardi S, Decina M, et al. Service Availability of Communication Networks[J]. Proceedings of IEEE NTC 80, 1980, 1(session-15.2): 876-899.
[15] 苑天佑, 闫少华. 考虑随机因素影响的区域管制空域的流量动态分配模型[J]. 计算机测量与控制, 2017, 25(6): 31-34.Yuan Tian-you, Yan Shao-hua. Dynamic Allocation of Flow Under the Influence of Stochastic Factors[J]. Computer Measurement & Control, 2017, 25(6): 31-34.
[16] 余贝, 王红霞, 谢杰荣. 基于可靠性的海底观测网传输网络拓扑结构研究[J]. 光纤与电缆及其应用技术, 2018(1): 25-27.Yu Bei, Wang Hong-xia, Xie Jie-rong. Research on the Topology of the Transmission Network in Submarine Observation Network Based on Reliability[J]. Optical Fiber & Electric Cable and Their Applications, 2018(1): 25-27.
Influence on Nodes Movement to Holistic-network Performability of Multi-AUV Collaborative System
LIANG Qing-wei, ZHANG Xin, YAN Xiao-hang
(School of Marine Science and Technology, Northwestern Polytechnical University, Xi’an 710072, China)
The multi-AUV collaborative system(MAUVS) has a wide space range, strong functions and high efficiency. While facing the complex ocean environment, system nodes are required to adjust their movement during execution of tasks. The change in the movement of the nodes will affect communication distance between nodes, and Doppler frequency shifts, which will in turn affect the reliability of MAUVS. Based on the topology, considering the bit error rate and the delay characteristics of underwater communication, the reliability of communication performance is described herein in terms of holistic-network performability, and a method for calculation of holistic-network performability is discussed. The effect of communication distance on links under different motion states is analyzed using examples, and the effect of the movement of nodes on the holistic-network performability of the entire network is discussed. This study verifies the reliability of the MAUVS communication network described using holistic-network performability.
multi-AUV collaborative system,; node movement,; reliability,; holistic-network performability
TJ630; TN929.3
A
2096-3920(2021)02-0170-06
10.11993/j.issn.2096-3920.2021.02.006
梁庆卫, 张鑫, 闫晓航. 节点运动对多AUV协同系统全网完成度的影响[J]. 水下无人系统学报, 2021, 29(2): 170-175.
2020-09-02;
2020-09-25.
国家留学基金委项目资助(CSC NO. 201606295006); 陕西省自然科学基金(2017M6089).
梁庆卫(1970-), 女, 博士, 副教授, 主要研究方向为系统工程.
(责任编辑: 许 妍)
