基于MSP430单片机的超声波倒车雷达系统设计
2021-05-15陈希湘朱嵘涛王锦莉
陈希湘,朱嵘涛,王锦莉
(长江大学工程技术学院,湖北 荆州434020)
0 引 言
近年来,随着机动车数量的持续增长,公路、街道和停车场拥挤不堪,可利用倒车的空间越来越少,驾驶员不能及时了解车辆周边尤其是后方的实时环境,导致驾驶员操作不及时,造成大量的交通事故[1⁃5]。本文提出了一种高精度的超声波倒车雷达系统,该系统以MSP430G2553单片机作为核心控制元件,利用超声波进行距离测量,实现了实时的距离显示和报警功能,使司机驾驶车辆的安全性得到了显著提高。
1 系统硬件设计
1.1 测距方案的选择
目前主流的倒车雷达系统采用激光、红外线、摄像系统、超声波等测距技术,不同方法的测距技术,其工作过程有所不同,但基本原理都是通过前方返回的探测信息判断车辆和障碍物之间的相对距离,并给出相应的预警提示。由于超声波指向性强、能量消耗缓慢,在介质中传播的距离较远,在测量精度方面能达到工业实用的要求[6⁃8],因此本文采用超声波的测距方案。
1.2 系统整体设计
基于MSP430G2553单片机的超声波倒车雷达系统的整体框图如图1所示。
1)超声波模块:在后方、左侧及右侧三个方位发射、接收汽车和障碍物之间的超声波信号。
2)按键控制模块:实现三个不同方位的距离测量选择和预警参考距离的设定。
3)MSP430单片机模块:主控核心元件模块实现汽车和障碍物之间距离的测量,并根据测量值与设定值的比较结果发出报警信息。
4)声光报警模块:当收到单片机的预警信号时,利用不同颜色的LED灯及扬声器进行报警提示。
5)OLED显示模块:实时显示不同方位的距离信息及设定的预警值。
1.3 核心控制器的选择
目前市场上大量使用的单片机主要有两种,分别是STC公 司STC89系 列 和TI公 司MSP430系 列,由 于MSP430系列单片机具有更快的运算速度及功耗低等诸多优点,所以本文采用MSP430G2553单片机作为核心控制器[9⁃11]。
1.4 硬件设计模块
1.4.1 单片机与超声波连接模块
MSP430G2553单片机与超声波连接模块是整个系统的核心,单片机的P2.2、P2.3、P3.0引脚控制超声波发送,P2.0、P2.1、P2.4引脚用来反馈接收回波。单片机与超声波模块连接图如图2所示。
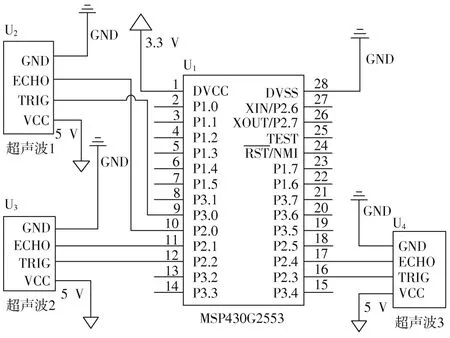
图2 单片机与超声波模块连接图
1.4.2 OLED显示模块
当DC置“0”时,OLED显示屏执行单片机输入的命令;当DC置“1”时,OLDE显示屏显示单片机传送的数据。OLED模块与单片机连接图如图3所示。

图3 OLED模块与MCU连接图
1.4.3 按键控制及复位模块
当按下其中一个按键,此时对应的P1口为低电平,在软件程序消除机械抖动后,MSP430G2553单片机准确地判断按键是否被按下,实现了不同方位的距离测试及报警预设值设定的功能。
1.4.4 指示灯报警模块
当实际距离小于设定预警距离时,MSP430G2553单片机通过P3.1、P3.4、P2.5给指示灯报警电路一个低电平,此时对应的发光二极管被点亮,给出警示信息。指示灯报警电路图如图4所示。
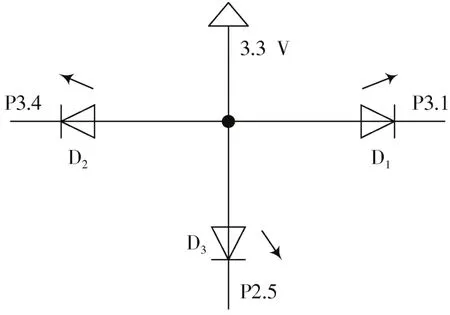
图4 指示灯报警电路图
2 超声波倒车雷达系统软件设计
2.1 主程序流程图
主程序流程图如图5所示。该程序实现超声波倒车雷达测距和预警功能,可以设置不同的预警距离,当测得的距离小于预警距离,系统自动发出报警信息,提醒驾驶员小心驾驶。
2.2 高电平持续时间计算程序设计模块
当超声波模块检测到回波时,通过ECHO引脚发出一个高电平,该高电平所用时间便是超声波从发出到接收的时间,只需计算出该时间,通过单片机可测得超声波模块与障碍物之间的实际距离。可以利用MSP430捕获功能检测一个高电平的时间,如果控制字CCTLX中的模式CAPX位置位,将选定捕获模式。捕获模式用于时间事件的精确定位。捕获寄存器在该系统中的设置如下:
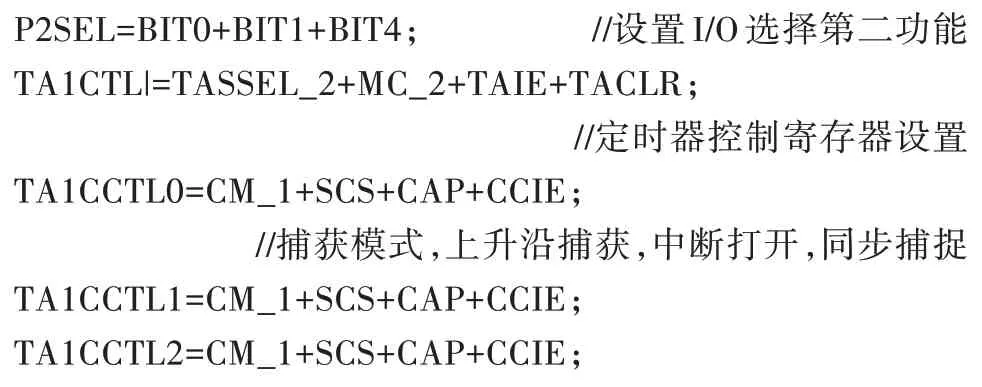
P2SEL=BIT0+BIT1+BIT4; //设置I/O选择第二功能TA1CTL|=TASSEL_2+MC_2+TAIE+TACLR;//定时器控制寄存器设置TA1CCTL0=CM_1+SCS+CAP+CCIE;//捕获模式,上升沿捕获,中断打开,同步捕捉TA1CCTL1=CM_1+SCS+CAP+CCIE;TA1CCTL2=CM_1+SCS+CAP+CCIE;

图5 系统主程序流程图
2.3 外部中断功能设计模块
为测得后方、左右两侧方位的距离,外部中断模块须从三个方向设置特定的按键。当某一按键按下时,对应的端口发生中断,执行相应的中断服务子程序。外部中断流程图如图6所示。
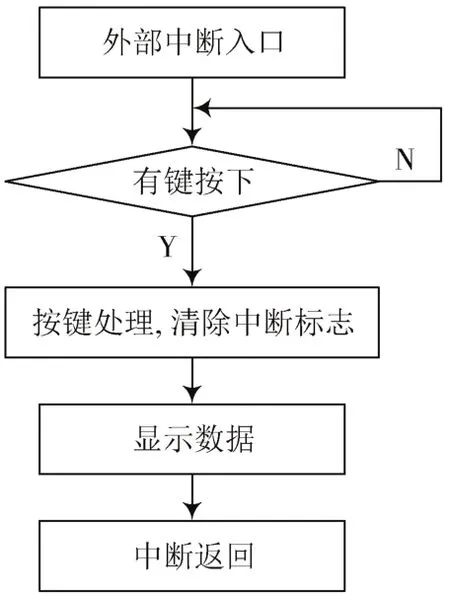
图6 外部中断流程图
2.4 显示模块设计
该OLED显示屏本身不带字库,需要用到字库取模软件,本文采用的显示方式为:以下方为高位,纵向八点,每次一个字节,由下往上显示在屏幕上。若该位为“1”,则表明该点显示,屏幕上显示的高位点组合成字。
3 结果分析
3.1 实物测试数据分析
1)超声波测距测试
超声波在传播过程中被障碍物遮挡时,接收端检测到回波,OLED液晶显示屏实时显示此时超声波到障碍物的距离。所有测试结果如表1所示。
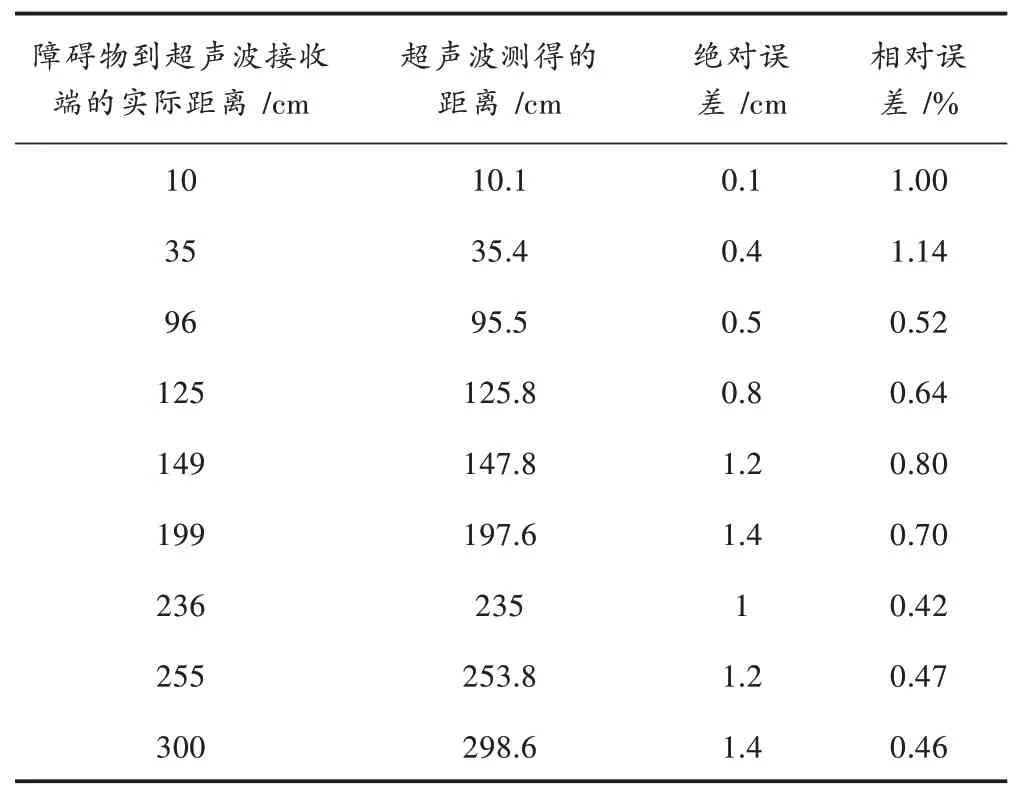
表1 超声波测试距离结果
2)超声波倒车雷达预警测试
当障碍物与超声波倒车雷达装置的距离小于设定值时,系统会自动发出预警信号,提醒驾驶员小心驾驶。为方便测试,将该系统三个方位的预警默认值都设为15 cm。预警测试结果如表2所示。
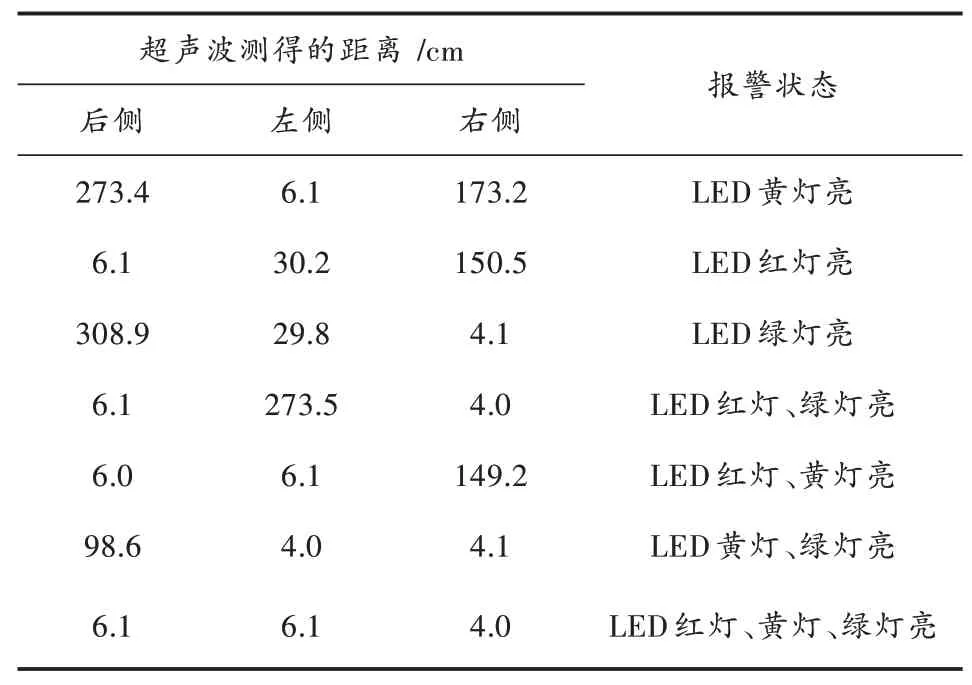
表2 超声波倒车雷达预警测试结果
当汽车左侧到障碍物的距离小于设定值时,LED黄灯亮提示报警。当汽车后侧、右侧距离同时小于设定值时,LED红灯、绿灯同时亮。当三个方位的距离都小于设定值时,3个LED灯同时点亮。
3.2 误差分析
由于超声波在空气中的传播速度会受到温度的影响,其关系为:

式中:C为超声波的传播速度(单位:m/s);t为温度[12⁃13](单位:℃)。
若要使该超声波测距装置测得更为精确的距离,必须时刻测量周围的温度,从而进一步提高精度。
4 结 语
驾驶员在倒车时,本系统能实现显示汽车和障碍物在三个不同方位的距离,并给出预警提示,保障驾驶员的安全。经过实际测试,结果表明该系统所测距离绝对误差控制在±1.5 cm以内,最大的相对误差为1.14%,平均相对误差为0.68%。该系统具有精度高、设计简单、使用方便等优点。
