基于数字全息干涉术的云微物理参数同步测量方法*
2021-05-14高攀王骏赵成成唐家斌刘晶晶闫庆华灯鑫
高攀 王骏 赵成成 唐家斌 刘晶晶 闫庆 华灯鑫
(西安理工大学机械与精密仪器工程学院, 西安 710048)
云微物理参数对气候变化、天气预测、人工影响天气、飞行安全等领域具有重要的影响.目前, 基于光散射、碰撞和成像理论的云微物理参数测量方法存在反演过程需要对云滴谱和粒子特性进行假设、撞击过程会破坏粒子特征、无法获得云粒子三维特征等瓶颈问题.本文提出了基于干涉理论, 结合光信息处理、景深压缩与融合全息图的灰度梯度方差技术的同轴数字全息干涉术测量方法, 可为云滴谱、云粒子直径、数浓度精细同步探测提供z 轴定位精度为0.01 mm、系统分辨率为2 µm 的技术手段.实验中, 以超声波雾化器产生的中值直径为3.9 µm 的液滴粒子作为液相云粒子的模拟, 测量结果与实际相符.该方法可为研究云中液态水含量, 及夹卷、凝结、碰撞和时空演化规律提供有效的支持, 对粒子的动力学研究具有借鉴意义, 并为我国陆基及机载测云应用提供了一套可行的系统解决方案.
1 引 言
云在地球能量平衡与水循环中起着重要的作用, 也是大气科学领域的研究热点之一[1−7].作为云微物理特性参数, 云滴谱、粒子直径、数浓度等是准确计算云中液态水含量, 及研究夹卷、凝结、碰撞和时空演化规律的重要参数.此外, 云的微物理特性对气候变化、天气预测、人工影响天气、飞行安全等领域也存在重要的影响, 因此日益受到研究者的关注.目前, 针对云微物理参数的测量, 国内外已发展了多种主动遥感探测与观测技术[8−12],在这些地基和天基的遥感探测中, 利用探测的功率谱数据反演获得云微物理参数时, 反演过程需要对云滴谱和粒子特性进行假设, 通常假设为伽马分布, 无法得到云滴谱的真实分布及数浓度, 测量精度需要验证.在碰撞取样式测量方法中[13,14], 大于100 µm 的粒子在撞击胶卷时会出现粒子破碎, 且撞击过程会破坏粒子特征, 因此该方法在测量粒径为10—100 µm 的粒子时具有较高的精度, 对于更小或更大的粒子测量困难.在直接成像与阴影投影式测量方法中[15−17], 采用照相技术在像平面上获得云粒子图像或在光阵探头上获得粒子灰度分布,再利用图像检测与处理技术获得粒子形貌、直径、粒子谱等云微物理参数.然而, 该方法只能获得测量路径上粒子图像的二维积分效果, 无法获得三维云粒子分布, 进而无法获得数浓度信息.在枪式取样式测量方法中[17], 用涂油或氧化镁玻璃片获取云滴样品, 事前准备和事后处理工作繁冗, 并无法获得云滴谱的三维空间分布.
不同于传统光学全息干涉术, 数字全息干涉术(digital holographic interferometry, DHI)大大地简化了全息图的记录过程和处理程序.由于省掉了干板的化学处理过程, 利用电荷耦合器件(charge coupled device, CCD)或互补金属氧化物半导体(complementary metal oxide semiconductor, CMOS)器件记录数字全息图, 使其具有了快速、实时、无损、全视场光学测量的能力[18], 因此DHI 被视为同步观测动态多参量物理场的潜在技术, 在粒子场成像[19]、血红细胞成像[20]、超快过程成像[21]等领域成功应用.目前, 利用DHI 测量云微物理参数的研究中, 国内外都取得了多项卓有成效的研究成果.Beals 等[22]、Peter 等[23]和Fugal等[24]先后利用同轴DHI 研究了云中粒子谱分布、数浓度、粒子直径和冰晶粒子.然而在上述研究成果中, 云滴粒子直径大于10 µm, 对于研究云滴谱受外界条件影响的演化过程难以提供完整的云滴谱数据支持.此外, 在测量路径中由于单一采用再现距离作为云粒子z轴位置, 因此粒子三维位置的确定精度不高, 且对云微物理特性多参数同步测量方法未进行报道.本文采用同轴DHI 结合景深压缩与三维图像互相关技术, 实现云微物理多参数同步三维测量.该方法可获得云粒子z轴位置精度为0.01 mm, 云粒子最小测量尺寸为2 µm.研究成果可为云降水物理、夹卷、混合凝结、碰撞等过程研究提供有力的科学研究手段.
2 理 论
同轴DHI 由于具有光路简单、信息密度大的优点, 以及在远场条件下记录的粒子孪生像干扰较小的特点, 因而被广泛应用于三维动态物场的记录与重建.当利用光波照明粒子时, 粒子的衍射光与未经调制的直透光形成干涉, 利用CCD 或CMOS记录数字全息图.当测量路径中包含n个粒子时,根据标量衍射理论全息图重建平面的强度分布UR(u,v)可表示为[25]
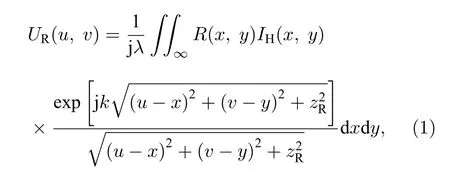
式中,R(x,y)为平面参考光波, 值为1;IH(x,y)为所记录全息图的强度分布;zR为重建距离, 在重建距离平面上的粒子聚焦, 可成像清晰; 其余位置粒子离焦, 且成像处于模糊状态.在同轴DHI 中重建获得的是粒子的轮廓边界, 如云中的液相粒子和固相冰晶粒子.轮廓边界的本质表现为粒子所处环境中, 由于边界处相态不同所引起的复折射率不同.因此, 该边界可认为是相界面, 对研究过冷水、冰包水粒子和水包冰粒子的特性具有重要意义.
当记录全息图时, CCD 或CMOS 的芯片尺寸为L(长度或宽度), 则同轴DHI 的系统分辨率δ可表示为

式中,λ为平面物光波波长,Z为记录距离,n为空气折射率.由(2)式可知, 随着记录距离的增大系统分辨率逐渐降低, 可使用放大的4f系统调节系统分辨率.此外, 由于CCD 或CMOS 像素数量与像素尺寸有限, 在记录数字全息图时空间带宽积受到限制.因此, 在测量云微物理参量时, 需要根据所测量云粒子尺寸来确定记录数字全息图的最小与最大距离(Zmin与Zmax).根据物参光的极限干涉角与所能记录的最小衍射级次, 它们可表示为
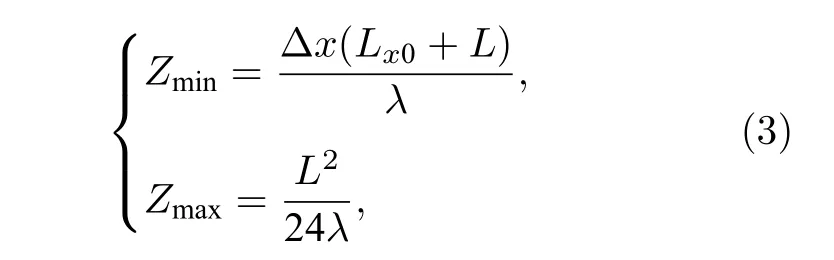
式中, Δx为CCD 或CMOS 的像素尺寸;Lx0为粒子直径.联立(2)式与(3)式, 可知在xy平面内,同轴DHI 系统分辨率主要由CCD 或CMOS 的像素尺寸、芯片尺寸和记录距离确定.在z轴方向单纯利用再现距离确定粒子位置时, 系统分辨率相对较低.因此, 本文结合再现距离和景深压缩, 以及融合全息图的灰度梯度方差法, 高精度确定粒子的z轴位置.在再现全息图中聚焦粒子的边界处,亮暗过渡带相比其他位置更窄, 说明粒子边界的灰度变化更剧烈, 可采用灰度梯度表征该变化, 并利用方差来评估变化的剧烈程度, 则灰度梯度方差k表示为
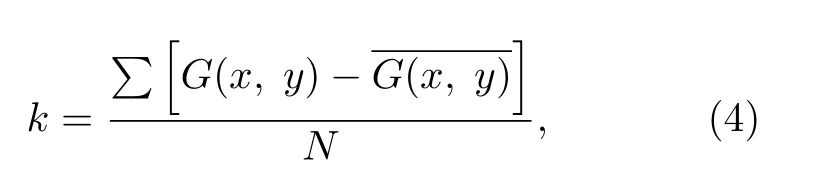
式中,G为总灰度梯度,G为平均灰度梯度,N为全息图各粒子区域像素点总数.利用该方法粒子z轴位置精度可达到0.01 mm.
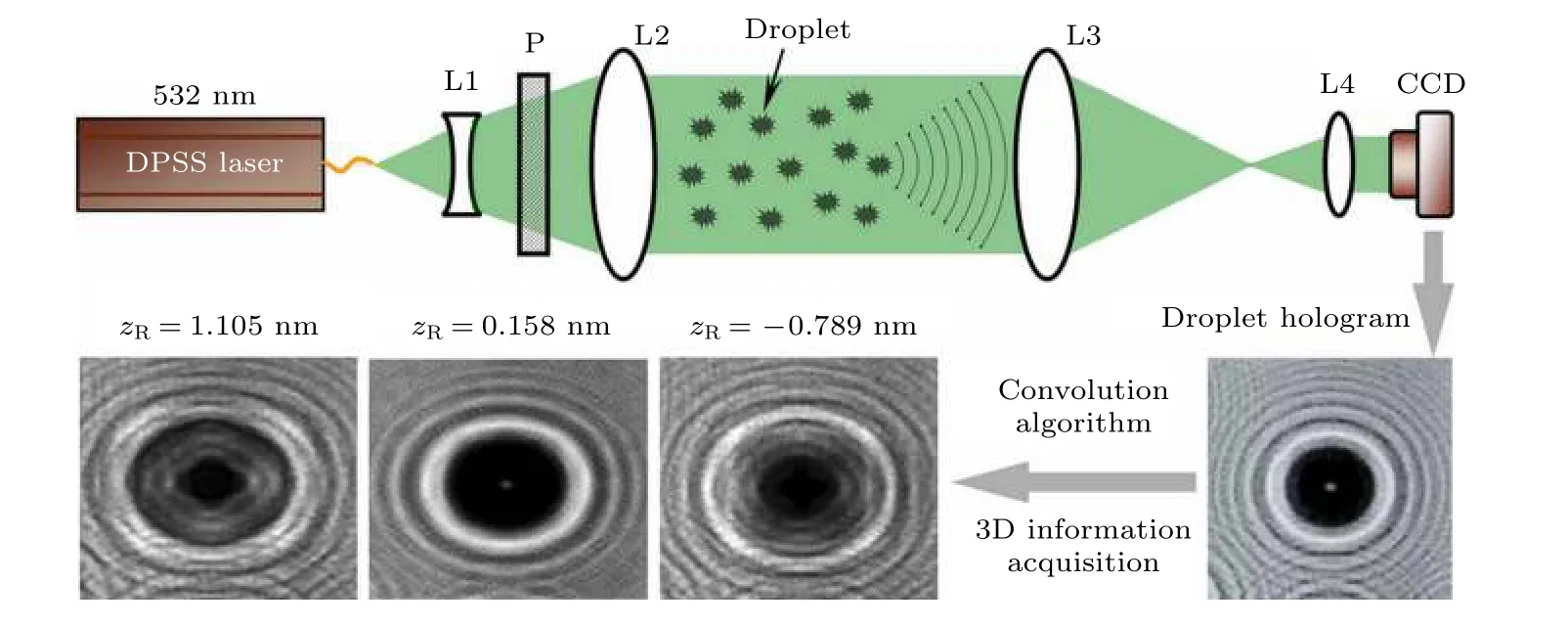
图1 同步测量云微物理参数的同轴DHI 实验光路Fig.1.Experimental setup for simultaneous measurement of cloud microphysical parameters.
3 实验系统
图1 给出了同步测量云微物理参数的同轴DHI 光路.为了减小光源对所在环境中湍流场的影响, 采用光纤耦合输出的532 nm 激光作为测量光源, 利用单模光纤将激光引入光路, 以减小光源尺度.光束传播通过透镜组(L1 和L2)以产生准直扩展光束, 两透镜组成发射端(外形尺寸为φ30 mm × 60 mm).云中的粒子产生的衍射光作为物光束, 未受干扰的光波作为参考光束.在光束路径中使用0.5 倍的4f系统(L3 和L4), 以提高z方向的测量精度.采 用CMOS (Basler 公司的acA3800-14 um 型 相 机, 外 形 尺 寸 为29 mm ×29 mm × 41 mm, 帧速率为14 f/s, 3840 × 2748(W × H)像素, 像素尺寸为1.67 µm × 1.67 µm)记录物光束与参考光束干涉形成的条纹, 进而形成数字全息图.偏振器P 用于产生线偏振光.
实验在恒温恒湿中进行, 温度为(23 ± 2) ℃,湿度为30%.使用图1 所示的同轴DHI 光路, 每秒记录14 幅全息图, 每幅全息图的曝光时间为38 µs.利用超声波雾化器产生的中值直径为3.9 µm 的液滴粒子作为液相云粒子的模拟.采用标准分辨率板USAF1951 与标准直径(5 µm)空心玻璃球分别标定实验系统的分辨率与粒子位置精度.
4 分析与讨论
根据CMOS 芯片与像素尺寸, 以及(2)式和(3)式, 为了保证在采样距离内系统分辨率都高于10 µm, 实验采样体积选择为6.4 mm × 4.6 mm ×100 mm (xyz).根据(2)式可知, 在z轴上最短采样距离为20 mm, 距离越远系统分辨率越低.将USAF1951 分辨率板分别置于距离CMOS 芯片20 mm 和35 mm 处拍摄数字全息图, 重建获得如图2 所示的再现图像.从图2(a)和图2(b)中可清楚分辨虚线圆中第7-6 组和7-1 图形, 即分辨率分别为2.19 µm 和3.47 µm.
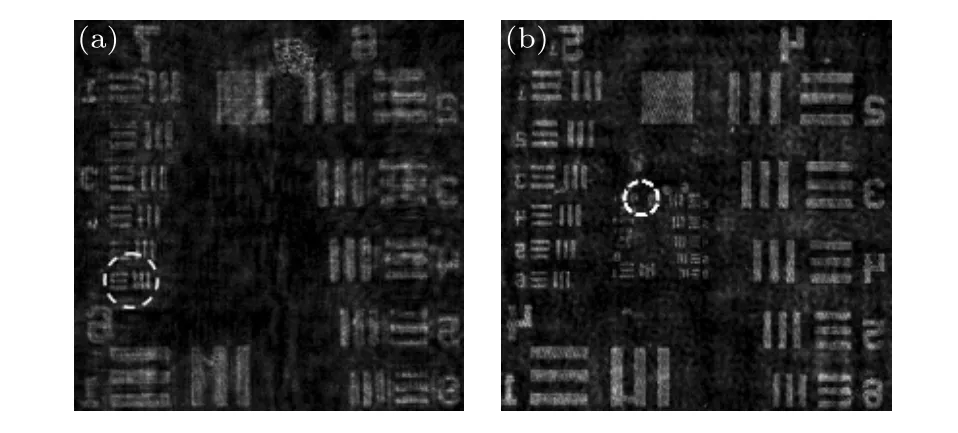
图2 USAF1951 标准分辨率板的再现全息图 (a) 采样距离为20 mm; (b) 采样距离为35 mmFig.2.Reconstructing hologram of USAF1951 standard resolution plate at (a) 20 mm and (b) 35 mm.
将标准直径为5 µm 的空心玻璃球放入蒸馏水中充分搅拌均匀, 在相同采样条件下获得多幅数字全息图, 图3 给出了单粒子的时序数字全息图,且图3 中每张全息图都可数值重建出一组光路中粒子群的三维坐标, 在时间序列上依次选取多张全息图就可以建立三维位置随时间改变的粒子运动轨迹.采用卷积法数值重建后, 利用比较图像融合法结合灰度梯度方差法确定粒子在z轴上的距离.图像融合后选取1 mm 距离中的101 幅再现全息图进行计算, 它们的灰度梯度方差如图4 所示, 需要对识别出的粒子区域进行灰度梯度的计算, 利用(4)式对所得梯度求方差, 方差最大点为最佳聚焦位置.图4 中单峰对应的全息图即为粒子的z轴位置, 则位置精度为0.01 mm.
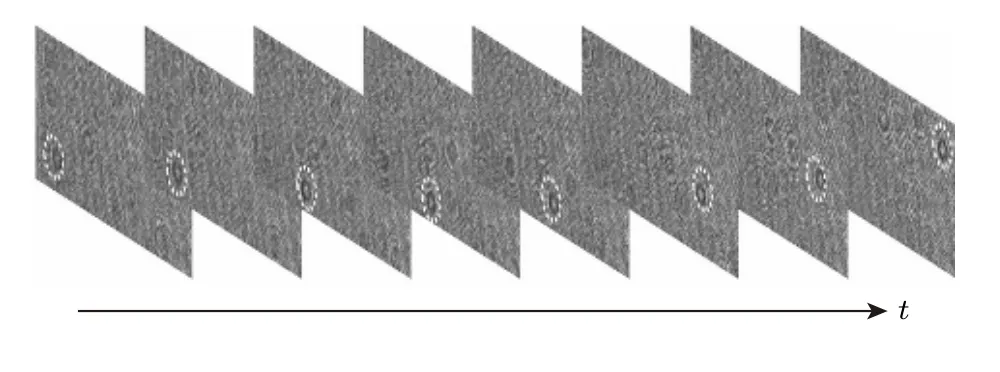
图3 单粒子的时序数字全息图Fig.3.Digital holograms of single particle at different times.
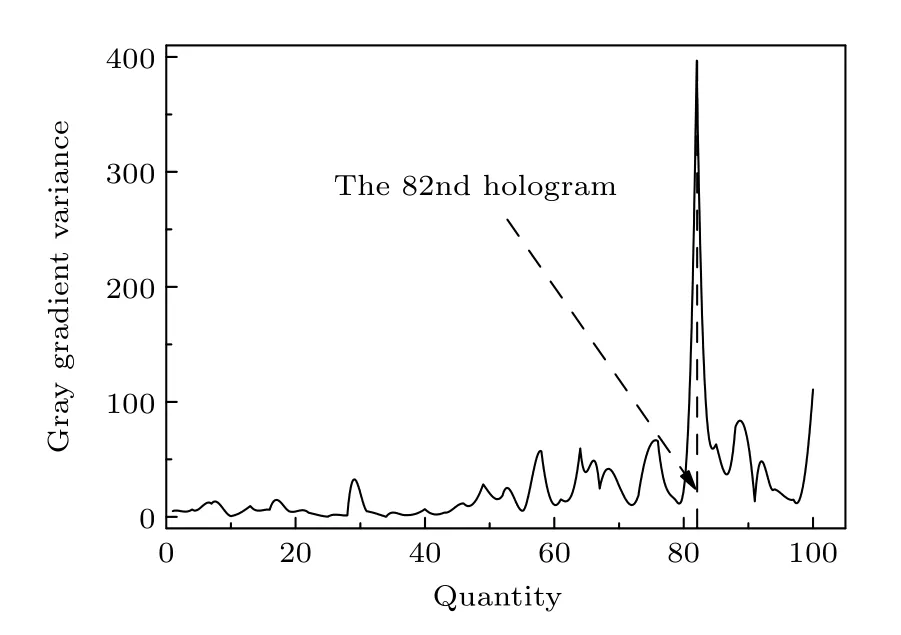
图4 融合全息图的灰度梯度方差分布Fig.4.Gray gradient variance distribution of fusion hologram.
采用基于三阶拉普拉斯算子的图像融合方法确定在xy平面上粒子的位置、数量和直径, 计算过程如图5 所示, 将1 mm 内的5 张全息图融合后得到第二幅融合图, 设置全局阈值将粒子与噪声及离焦像分离, 提取所有识别出的粒子进行贴标签计数, 之后用红框标记出粒子得到第三幅图.考虑到光学系统的放大率和像差, 及粒子运动拖尾现象,粒子xy平面上的位置精度可达到一个像素量级(µm 量级), 高于z轴的位置精度(10 µm 量级)一个量级.由于研究云滴谱的重力与湍流碰并耦合中, 需要单粒子的矢量速度, 在粒子的三维速度合成中,z轴的位置精度决定速度精度.因此xy平面上的位置精度可保证云微物理特性的研究需求.综合上述方法对图3 中的单粒子进行重建与特征参量提取, 如图6 所示.粒子直径为4.6 µm, 三维位置确定后的运动轨迹与图5 中时序数字全息图的轨迹一致.
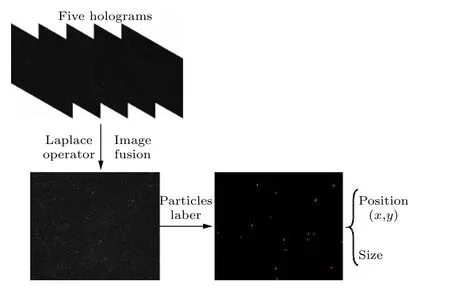
图5 xy 平面内位置坐标与粒子尺寸确定Fig.5.Position coordinates and particle size in xy plane.
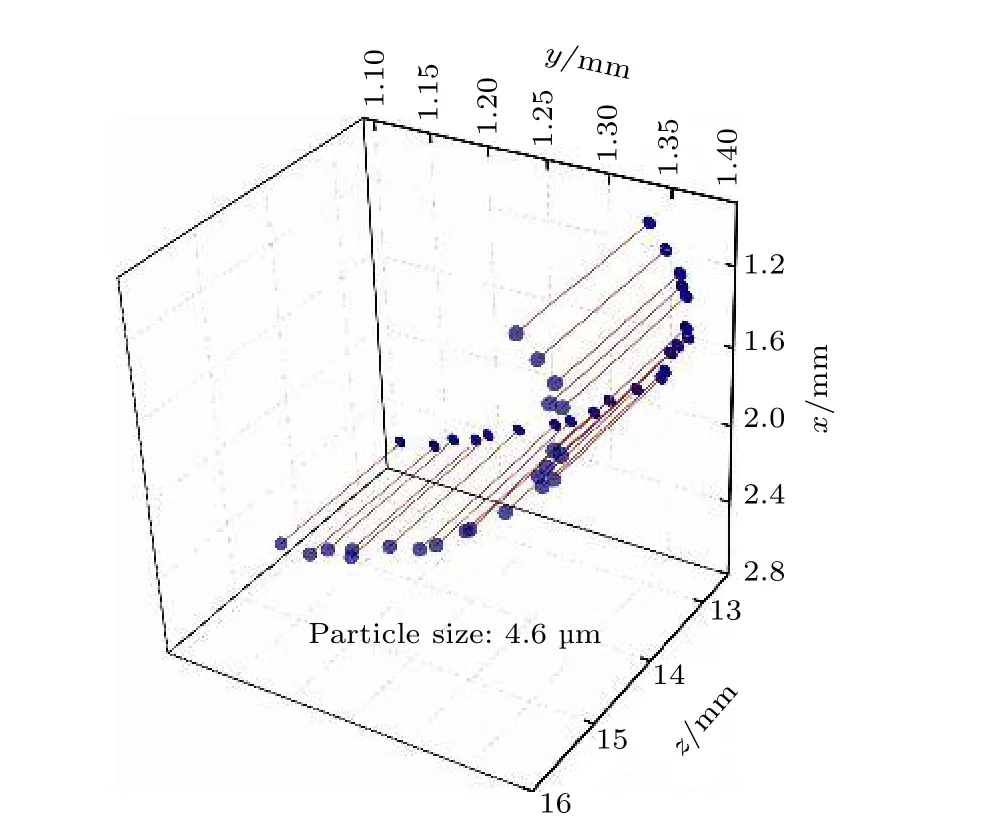
图6 单粒子的三维运动轨迹Fig.6.Three-dimensional motion trail of a single particle.
在云微物理过程中, 通常直径为40 µm 的液滴粒子才启动以重力过程为主的重力碰并过程.使用中值直径为3.9 µm 的液滴粒子时, 为了可观测到不同直径的液滴粒子, 在出雾口处加入一个旋转的微气流场以模拟云中湍流.由于随机湍流起伏会引起小粒子凝结和碰并增长过程, 使液滴粒子直径增大, 进而可观测到多种直径的粒子.图7 给出了中值直径3.9 µm 的液滴粒子测量结果.在图7(a)中, 液滴粒子主要分布于出雾口周边, 由于湍流碰撞过程出现了10 µm 左右的大液滴粒子.此外, 在出雾口两端, 由于湍流作用小液滴粒子出现了团簇现象.图7(b)展示了采样体积内的粒子谱, 测量值的中值直径为3.9 µm, 与理论值相符.由于系统分辨率的限制, 粒子谱中小于2 µm 的液滴粒子谱缺失.然而, 可以通过在光路中加入显微物镜和增大CMOS 芯片尺寸, 以提高系统分辨率, 进而获得小于2 µm 的液滴粒子谱.将采样体积分为两个子区域, 统计子区域中粒子的个数, 如图7(c)和图7(d)所示, 进而获得数浓度, 分别为847 个和88 个粒子.通过进一步细分子区域的尺寸, 与传统云微物理测量方法相比, 可获得精细的数浓度分布.可为小尺度湍流影响的云滴粒子碰撞、凝结、夹卷等提供精确的数据支持.
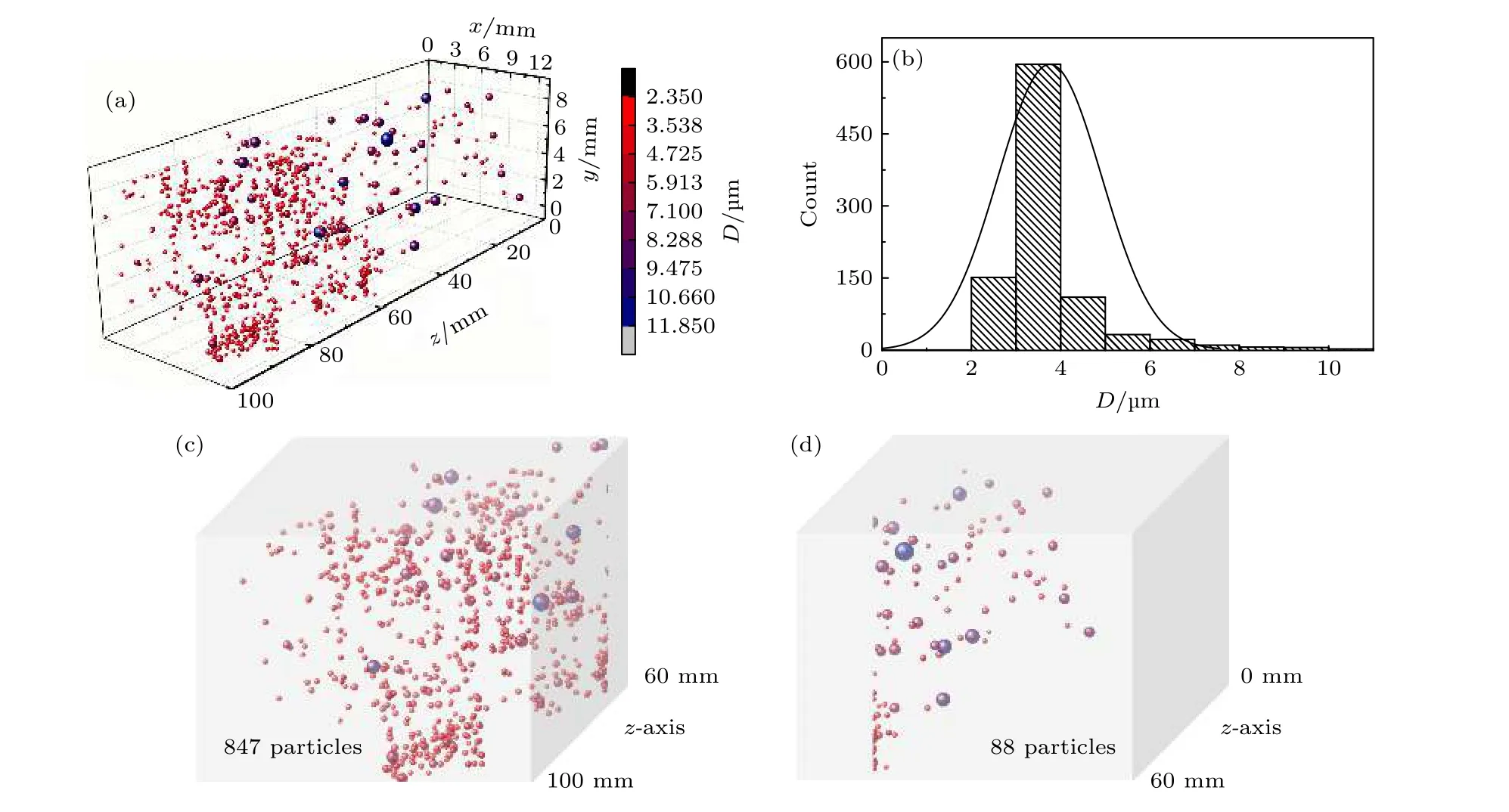
图7 中值直径3.9 µm 的液滴粒子测量结果 (a) 粒子分布; (b) 粒子谱; (c) z 轴60—100 mm 数浓度; (d) z 轴0—60 mm 粒子谱Fig.7.Measurement results of droplet particles with the median diameter of 3.9 µm: (a) Particles distribution; (b) particles spectrum; (c) number concentration from 60 mm to 100 mm at z axis; (d) number concentration from 0 mm to 60 mm at z axis.
5 结 论
针对云微物理参数的同步测量需求, 本文提出了基于干涉理论, 结合景深压缩与融合全息图的灰度梯度方差方法的同轴DHI 技术, 可为云滴谱、云粒子直径、数浓度精细探测提供z轴定位精度为0.01 mm、系统分辨率为2 µm 的技术手段.实验中, 以超声波雾化器产生的中值直径为3.9 µm 的液滴粒子作为液相云粒子的模拟, 测量结果与实际相符.此外, 本方法光路中可引入显微镜头为更小尺度云滴谱与冰晶形貌的测量提供支持.本文提出的云微物理参数的同步探测方法解决了传统测量方法中反演过程需要对云滴谱和粒子特性进行假设、撞击过程会破坏粒子特征、无法获得云粒子三维特征等的技术瓶颈.研究成果可为准确计算云中液态水含量, 及研究夹卷、凝结、碰撞和时空演化规律提供可靠手段, 进而对气候变化、天气预测、人工影响天气、飞行安全等领域有着重要的研究价值和显著的社会效益.
