手机遥控监控机械臂智能车的设计
2021-05-14黄恒一付三丽
黄恒一 付三丽
(三亚学院,海南 三亚 572022)
1 引言
科技在不断进步,智能化的设备不断普及和应用,促使机械化自动化的设备应运而生,由于现实生活环境中的一些极端天气条件及人类不便作业的地方对智能机械化作业的需求,因此,用机械臂代替人类双手完成某些工作是有必要的,特别是在一些特殊的场合,比如警察在碰到炸弹时由于环境危险,可利用履带机器人完成工作;还有在存在毒气、狭窄的缝隙,崎岖的山地,需要搬运一些有辐射的物体,这些场景都能体现机械臂智能车的优势[1]。本文设计了一款手机蓝牙无线监控智能车,具有低成本、便捷性、易操作等特点。
2 系统设计
本文设计的智能手机控制机械臂智能车能实现对目标区域物品的实时监控及抓取作业。该智能车的优势是操作便捷,容易上手,同时智能车主体硬件部件构造简单,除无线抓取功能之外,还可以实现目标区域图像信息的回传显示监控[2,3]。
2.1 智能小车设计思路
智能车Arduino单片机核心控制模块负责控制小车的各种操作以及连接各模块;BT18蓝牙通信模块用于智能手机与遥控履带车的信息交互,负责将接收APP发出的指令传输到单片机中从而进行远距离通信;电源模块选用两节4.2v电池电源供电;驱动模块利用舵机控制机械臂抓取功能完成抓取作业;监控模块选用WIFI数传,实时在手机上传输视频;驱动模块驱动两台微型直流电机,使履带车实现前进后退转向功能[4]。
2.2 智能车的硬件设计
本文设计的机械臂智能车硬件部分分为5个模块,分别是Arduino板核心控制模块,监控模块,蓝牙通信模块,电源模块,驱动模块。其中主控模块用于实现智能车主体各种功能的控制及数据的处理;蓝牙模块用于智能车与用户之间的数据交互;驱动模块实现智能车机械臂的控住操作;监控模块实现智能车主体摄像头与目标区域图像信息的采集;电源模块用于实现对智能车主体部件的电源供电。

图1 智能车俯视图
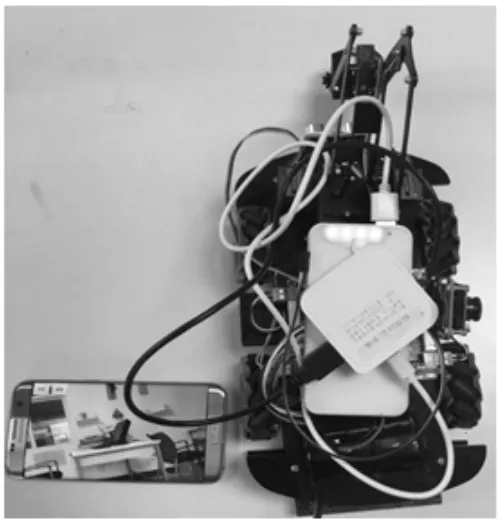
图2 智能车带监控模块图
图1为不含外接监控模块智能车主体,图2所示为含外接监控模块蓝牙智能车主体,图2所示为手机监控端可以通过WiFi的方式接收智能车主体上摄像头回传的监控画面[5]。
2.2.1 智能车外接监控模块
智能车外接监控模块选用工作电压5V工作电流1.0A的WiFi智能模块,智能车搭载这个模块来实现图像信息的传送,本模块供电口为5V充电宝进行供电,USB接口连接摄像头再通过手机APP连接设备的WiFi即可实时视频传输。

图3 监控模块外接电源接口

图4 监控模块外接免驱摄像头接口
图3、图4监控模块相关外接部件配置完毕后,用户即可实现对智能车外接监控图像信息的回传查看。

图5 智能车监控测试

图6 PC端监控回传图像信息
由图6可知,当智能车处于正常运行时,与智能车车身路由器网关处于同一局域网环境中的终端设备,也可以通过浏览器端实现对监控图像信息的回传查看。
2.2.2 智能车机械臂模块
文中智能车机械臂模块选用三个MG90S舵机,其中两个为一个整体,两个舵机配合来完成机械臂的移动功能,第三个控制机械爪的张开闭合。通过stm32本身的PWM端口生成相应的波形,编程用于控制机器手臂的动作程序以实现对舵机的控制。
MG90S舵机工作其原理是控制电路接收来自信号源的控制脉冲,驱动电机转动,齿轮将速度呈大倍数降低,并将输出扭矩放大到响应倍数,然后输出;电位器随末位动级转动,测量舵机的转角角度;电路板根据电位计检测判断舵机的转角角度,然后控制舵机转动到目标角度或保持在目标角度。为了模拟舵机转向,外部控制器必须输出PWM信号,以指示舵机的旋转角度。舵机控制器所需的编码信息是脉冲宽度。舵机的控制脉冲周期20ms,脉宽范围0.5ms~2.5ms,分别对应-90o到+90o的位置(对于180o舵机)。
用户手机端APP通过发送控制机械臂爪子不同的指令至智能车主控芯片,通过智能车主控芯片进行解码,来控制智能车机械臂手臂产生不同的效果[6,7]。

图7 智能车机械臂控制端APP

图8 智能车机械臂小臂
2.3 智能车软件部分
智能车软件部分分为三部分,分别为机械臂小车运行状态用户控制端手机APP软件、智能车芯片主程序及智能车监控端手机APP。
2.3.1 程序设计流程
总体程序流程分为三个部分,第一个部分主要用来控制小车的运动以及舵机的运转,也就是机械臂的控制;第二部分控制图像传输;第三个部分是智能车主体芯片程序。

图9 程序设计流程图
其中,智能车主控芯片程序是通过Keil软件进行开发;手机控制端APP适合初学者使用的网页制作平台,在MITApp inventor平台上,可以通过拖动各种功能按键实现软件的制作,组件设计和逻辑设计都十分方便;智能车监控端手机APP,最佳的方案是利用Java语言在eclipse IDE进行开发[8,9]。
2.3.2 APPInventor程序设计
APPInventor2是一个在网页上就能进行操作的可视化安卓应用程序制作平台。用户只需要使用浏览器打开APP Inventor2的平台网站,使用账户登录后即可通过拖拽组件和逻辑块来完成安卓应用程序的制作,操作十分简便,入门门槛较低,不同于传统的APP制作开发需要Java语言的基础和Android应用开发的基础,而且其应用领域十分广阔。
论文中智能车用户控制端APP是在APPInventor2开发平台上开发完成的,主要是用来遥控机械臂智能车的各种功能,对小车发送前进、退、左转、右转、机械臂模块的相关指令功能。
图10和图11所示为智能车用户端APP软件设计的相关界面。
2.3.3 智能车监控端APP的设计
监控端APP通过准备好JDK,android SDK,ADT和开发工具Eclipse构建APP开发平台,采用Java语言编写。
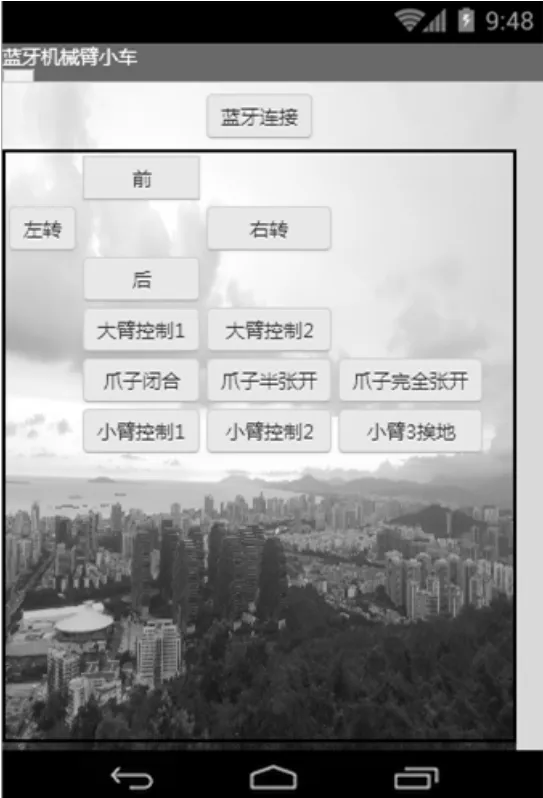
图10 APP界面端

图11 APP逻辑代码界面
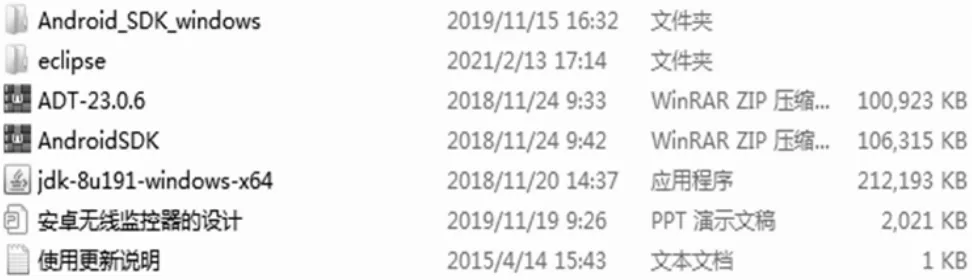
图12 监控APP开发组件
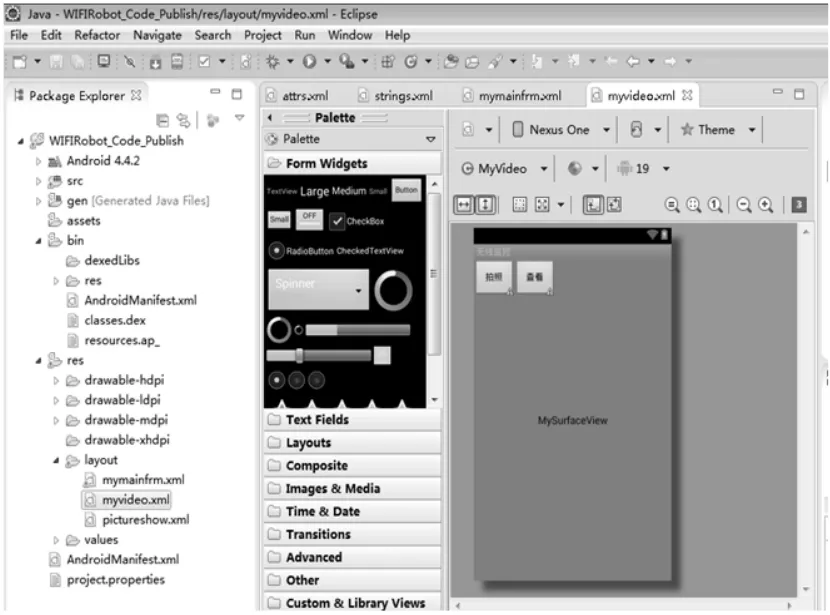
图13 监控APP开发界面
通过图13可知道,所开发的监控端APP,可以实现对目标区域图像的实时监控及抓拍[10]。
3 结语
论文设计的机械臂智能车可以在一些极端条件下辅助人类进行相关作业。虽然智能车还存在避障、传感、自主导航等一些技术问题需要进一步拓展研究,但是相信随着科技的进步,未来人们可以通过机器人和机器车来代替人们去处理一些危险、困难、艰苦的工作,使科技服务于人类,推动社会的进步。