基于雷达测量数据的列车运行前方障碍物检测方法研究
2021-05-13郑云水郭双全
郑云水,郭双全,董 昱
(兰州交通大学 自动化与电气工程学院,甘肃 兰州 730070)
铁路运输系统作为三大主要运输手段中最主要的运输方式,对旅客出行和大宗货物的流通承担着重要的运送使命。而随着社会快节奏的发展,人们对交通运输出行的要求也越来越高,既要求其具备高的时效性和便捷性,又要求其具有高的安全性。这本身就是对现代轨道交通的巨大考验。可以发现,一直以来由于异物入侵铁路限界而引发的列车行车安全事故频有发生,严重损害了轨道交通运输的安全。国际铁路联盟2018年的安全报告就显示,造成铁路运行安全事故的主要原因是铁路线路维修人员非法上道作业及铁路沿线人员抢越道口。但由于异物入侵运行环境具有随机性,且列车只能在特定的轨道线路中运行,无法躲避随机异物的入侵,故在铁路运输时由异物侵入建筑限界造成的安全事故一般都较为严重。因此,迫切需要研究一套列车运行环境监控系统来保证列车的安全运行[1-4]。
目前,国内外相关领域的研究大都基于视觉传感器和雷达传感器,实现对列车运行环境的监控。文献[5]利用机器视觉来对前端检测到的环境信息进行分析,提取出障碍物,并利用嵌入式技术搭建了异物侵限检测系统。文献[6]利用3台视觉传感器构建了机车前方轨道障碍物检测系统。文献[7]利用车载前视摄像机获取环境数据,并采用Hough变换实现障碍物检测。文献[8]采用单目热敏相机进行障碍物检测。文献[9]提出了通过特征匹配和光流法对路轨障碍物目标进行检测。文献[10]利用单目视觉检测获取列车运行前方行车环境数据,并通过构建Adaboost分类器对获取的数据进行检测识别,有效地提高了识别的准确度。文献[11]利用Bresenham算法实现了钢轨迹线的提取。文献[12]设计了一种随车激光雷达轨道障碍物探测系统。
本文以车载雷达获取的列车运行前方目标体数据为基础,通过对雷达获取的信息进行详细分析,并结合铁路限界,确定了本文的研究思路及主要研究内容。根据本文研究思路整理出的,铁路线路中异物侵限检测过程结构框图见图1。

图1 异物侵限检测过程结构框图
1 设备安装位置分析
通过对铁路线路特点及雷达检测区域的分析,确定将雷达和GPS安装在机车车头正中心位置,且将GPS尽量设在雷达发射线束的中心处。障碍物雷达检测设备安装见图2。
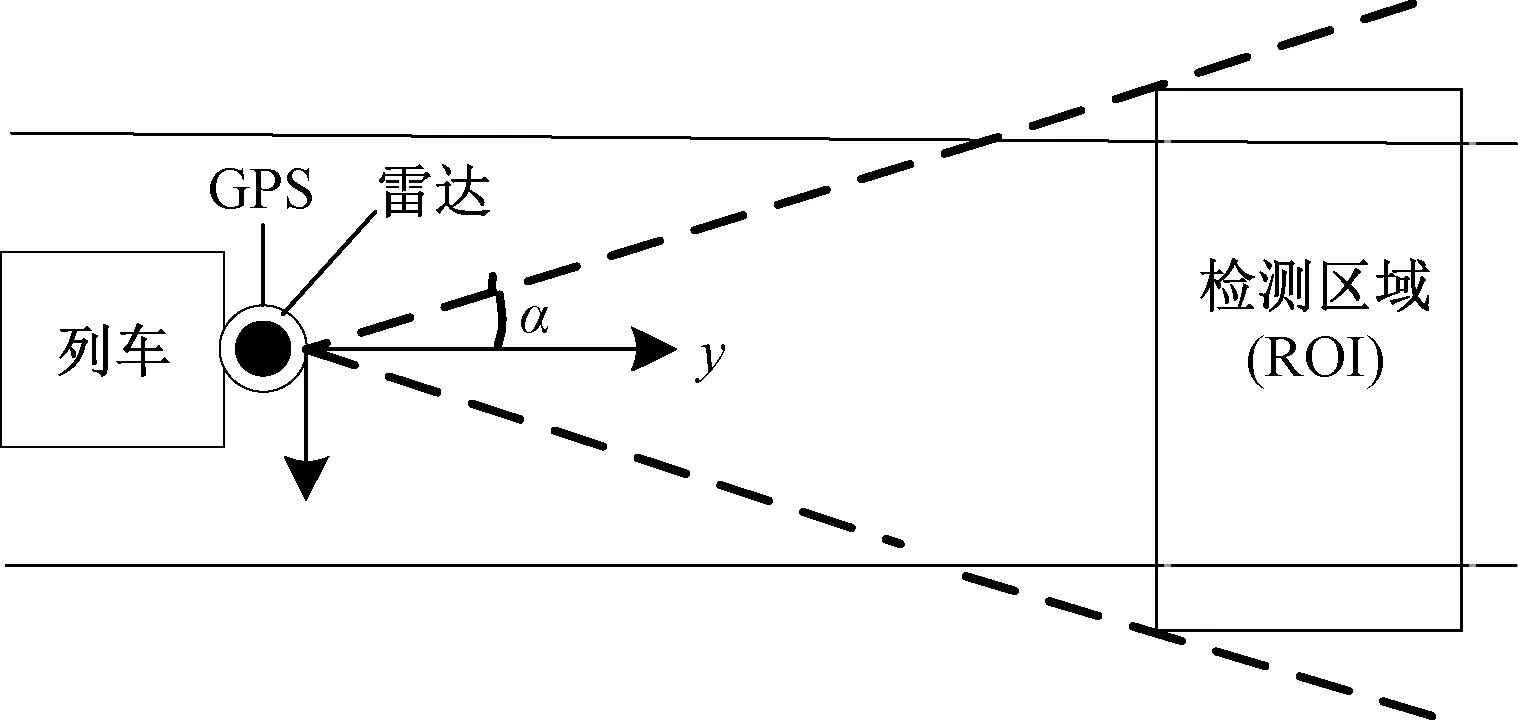
图2 障碍物雷达检测设备安装
根据现场应用环境及所需实现的功能,选取FD4-1000CJ10型号的x波段雷达作为检测端。本款雷达具有较强的环境适应性,且基本上不受光照、灰尘、雨雪、雾霾等恶劣环境影响,其主要的电气参数见表1。
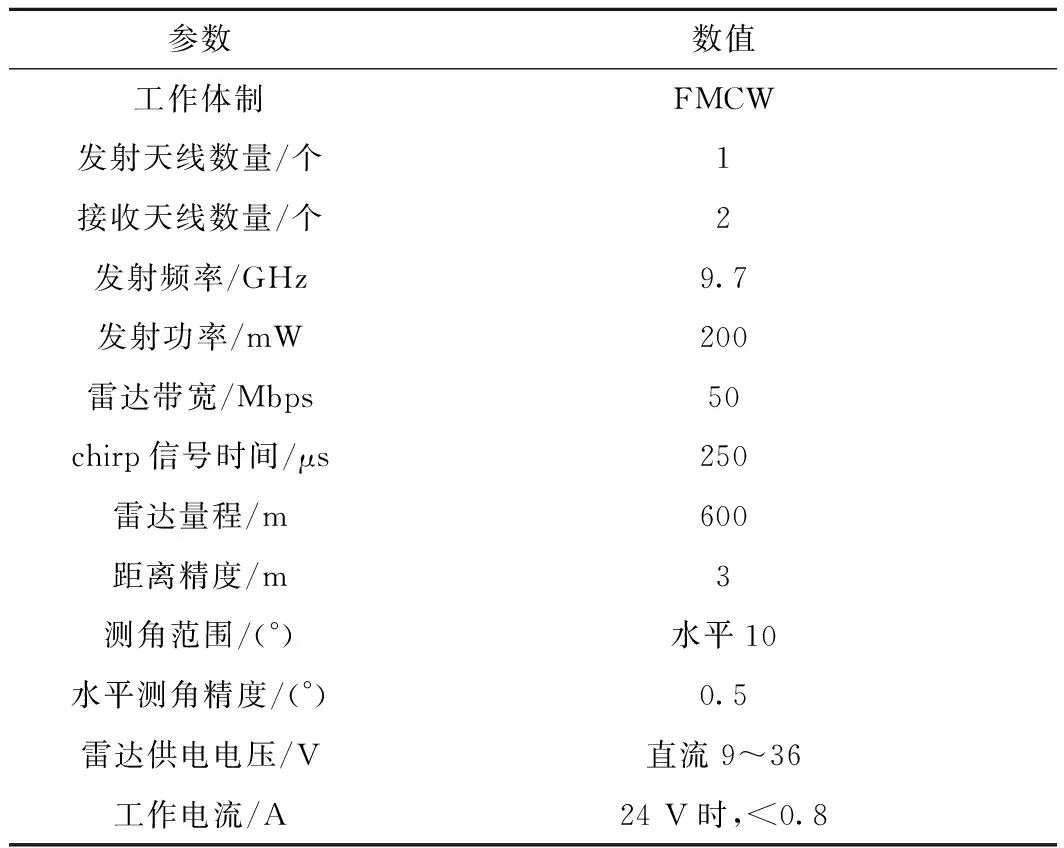
表1 FD4-1000CJ10型雷达主要电气参数
2 雷达测量数据预处理
由于测量器械设计方面存在缺陷,使得雷达测量数据中含有较高的系统误差,这种系统误差一般是有规律的,因此可以通过多次测量寻找其与真值之间存在的对应关系,从而将其滤除掉。本节提出的雷达测量数据预处理,其目的就是为了消除雷达测量数据中存在的系统误差[13-14]。雷达数据预处理环节的总体设计思路见图3。将雷达固定,让目标在x轴向的距离保持不变,仅沿着y轴方向运动(如图3中让目标沿x=m运动),即此时对应的实际目标运动轨迹函数为x=m。目标在x=m上移动时,雷达探测到一系列该目标的位置坐标(xi,yi)(i=1,2,…,n),利用最小二乘法对这些位置坐标进行曲线拟合,可得到雷达测量点拟合函数表达式,通过对雷达测量点函数和实际目标运动轨迹函数作差值,即可得到误差函数。根据文献[15]可得误差函数表达式为
Δx=0.051y+0.21
(1)
式中:Δx为雷达横向误差;y为雷达纵向距离值。根据式(1)进行误差评估可得,预处理后雷达的误差范围大概为[0 m,0.35 m],平均误差值大约为0.11 m。可见,将雷达原始目标数据经过预处理后,有效地消除了由于雷达精度及设备缺陷带来的系统误差,提高了障碍物检测的准确性。
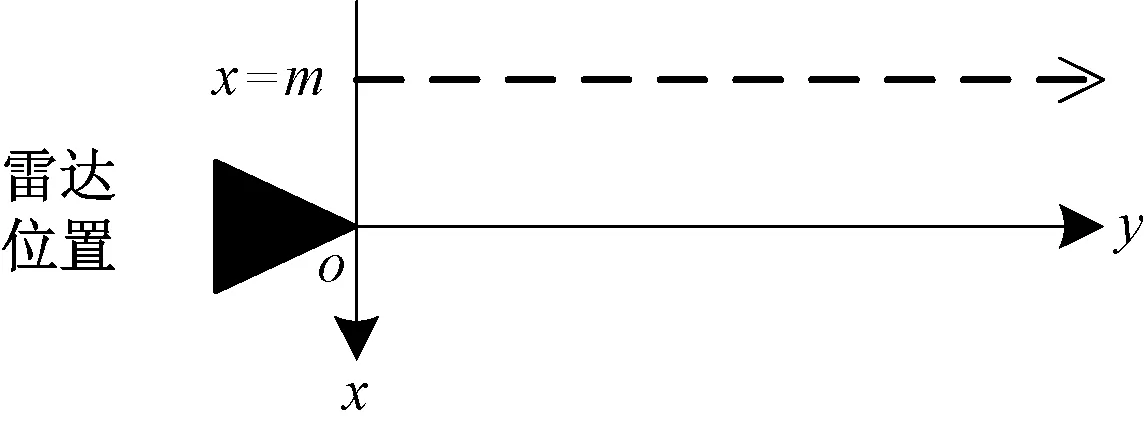
图3 雷达数据预处理总体设计思路
3 基于GPS的列车定位轨道地图算法研究
3.1 坐标变换
由于GPS测量得到的是WGS-84中的地心空间坐标系,而雷达检测得到的是雷达平面直角坐标系,因此在利用GPS辅助定位雷达的坐标位置时,必须先将雷达坐标系与GPS的WGS-84坐标系统一转换到共同的坐标系,即本文提出的工程坐标系中,转换步骤及其相对应的转换方法[16-17]如下。
Step1利用WGS-84大地坐标(B84,L84,H84),计算出地心空间直角坐标(X84,Y84,Z84)。
(2)

Step2利用Bursat七参数模型,将WGS-84空间直角坐标(X84,Y84,Z84)转换为北京54空间直角坐标(X54,Y54,Z54)。
(3)
式中:ΔXo,ΔYo,ΔZo均为平移变换因子;dK为尺度变换因子;εx,εy,εz为旋转变换因子。
Step3将北京54空间直角坐标(X54,Y54,Z54),转换为北京54经纬度坐标(B54,L54,H54)。
(4)
Step4设投影带的主子午线经度为Lo,地表某点的北京54坐标下的经纬度为(B54,L54),其对应的高斯平面坐标为(x54,y54),则可通过高斯投影正算将北京54经纬度坐标转换为高斯平面坐标。
(5)
式中:角度均为弧度值;l″=L54-Lo;t=tanB54;η2=e′2cos2B54;ρ″=180°/π·3 600;X为子午线弧长,其计算公式为
X=a0B54-sinB54cosB54[(a2-a4+a6)+
(7)
(8)
(9)
式中:a0,a2,a4,a6,a8,m0,m2,m4,m6,m8均为基本常量。
Step5将北京54平面坐标(x54,y54)利用二维四参数模型转换为本文建立的工程平面坐标(x,y)。
(10)
式中:xo,yo均为平移参数;α为旋转参数;1+m为尺度参数。
通过式(2)~式(10)即可实现GPS测得的WGS-84经纬度坐标到实际应用的工程平面坐标的转换。此段线路数据共包含1 298组数据点,相邻数据点间距离为1.5~3 m,平均距离约为2 m。实测轨道线路数据点转换结果仿真见图4。

图4 实测轨道线路数据点转换结果仿真
3.2 实测数据初始化
轨道地图数据初始化是为了消除GPS实测数据中存在的粗差数据。通过对实测数据进行分析,找到粗差数据与正常数据之间的差异,消除粗差数据,使初始化后的数据能够满足轨道地图生成的基本要求。
由文献[18]可知,实测数据最常见且对轨道线路拟合影响最大的粗差数据,是由数据漂移造成的。通过对偏离错误数据的特性分析,可根据相邻点连线的角度变化,判断某测量点数据是否存在测量粗差,其具体判别步骤如下。
Step1获取相邻两点间连线的角度值[19]。
(11)
式中:(xi,yi)为经雷达误差处理后的雷达测量点;tmpθi为相邻两点间连线的角度值。
为了区分不同的象限和考虑分母等于0等情况,实际角度的定义为
(12)
Step2计算角度变化值。根据Step1的计算结果,可将角度变化计算公式定义为
Δθi=θi+1-θi
(13)
如果角度变化超过正、负180°的范围,此时需要用式(14)对式(13)的角度变化量进行修正。
(14)
Step3设定角度变化范围,剔除误差数据。因铁路线路在小范围内是比较平缓的,相邻测量点之间的角度变化是相对较小的,故可根据角度变换的散点图设定其角度的变化范围。设θup是角度变化的上界值,θdown是角度变化的下界值,如果Δθi不满足式(15),则可判定该测量点存在偏移错误。
θdown≤Δθi≤θup
(15)
对从现场测得的轨道线路数据,做角度变化散点图,剔除粗大误差数据,其角度变化散点图仿真见图5。

图5 角度变化散点图仿真
对图5分析确定角度变化阈值,设定θup=5°,θdown=-5°。其中22个点的角度变化超过设定的阈值范围,即可判定其是粗差数据,将其从实测数据中剔除。
3.3 轨道线路拟合
铁路线路由直线、缓和曲线及圆曲线线元组成,但由于在实际中缓和曲线和圆曲线的分界点是很难确定的,故在以往研究轨迹线路拟合中,几乎都将缓和曲线部分和圆曲线部分视为同种曲线进行拟合[20]。本文也将缓和曲线和圆曲线视为同种曲线进行轨迹线路拟合,其拟合过程如下。
Step1轨道线路形态判别。分析经初始化后的线路上相邻两个测量点间连线的斜率差Δki=ki+1-ki,(i=1,2,…,n-1),通过斜率差Δki的变化判别轨道线路形态,具体分为以下3种情况:
(1) 当Δki趋于0时,说明线路趋于直线。
(2) 当Δki为常数时,说明线路在圆曲线上。
(3) 当Δki的变化率大致相等且为常数时,说明线路为缓和曲线。
对于(2)、(3)两种情况,轨道线路斜率发生明显变化,则认为线路为曲线,将其视作同种情况。对实测数据点做斜率差散点图,见图6。
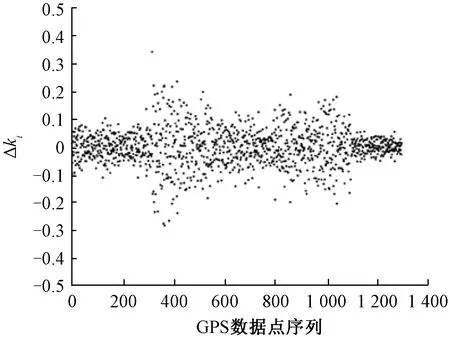
图6 斜率差散点图
由图6可得,轨道线路数据点序列在311~1087之间波动较大,在两端波动基本在-0.1~0.1之间微小变动,即可将阈值范围设定为[-0.1,0.1],由此可将实测线路数据分为2段直线段和1段曲线段。
Step2分段拟合。设将轨道线路分为T段,其中TL段是直线线路,TC段是曲线线路,即:T=TL+TC。设直线线路部分坐标为(xL,Lq(x)),曲线线路部分坐标为(xC,Sj(x))。直线线路部分采用一次函数进行曲线拟合,曲线线路部分采用三次多项式函数进行曲线拟合,其表达式为
Lq(x)=cqxL+dqq=1,2,…,tL
(16)
Sj(x)=ajxC3+bjxC2+cjxC+djj=1,2,…,tC
(17)
式中:cq、dqaj、bj、cj和dj均为拟合参数,为待求值。
利用最小二乘法对轨道线路数据点分段拟合,其拟合仿真结果见图7。
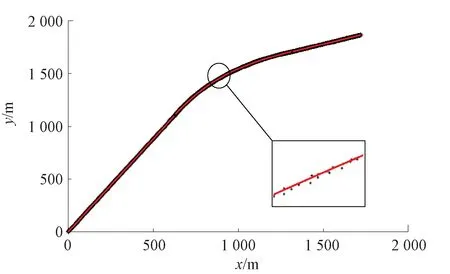
图7 轨道数据分段拟合仿真结果
Step3整合分段表达式。将分段拟合后的曲线表达式相叠加,即可得到轨道地图分段多项式表达式为
(18)
式中:ψT(x)为线路分段总集合;ψtC(x)为线路曲线段分段总集合;ψtL(x)为线路直线段分段总集合。
将得到的分段轨道线路函数表达式代入式(18),得到轨道地图分段多项式表达式为
(19)
3.4 轨道线路拟合效果分析
利用GPS在该轨道区段上测量300组数据点,计算各个测量点距离拟合出的轨迹线的距离,得到轨迹线地图的定位匹配结果,见图8。由图8可知,各测量点到轨迹线地图的平均距离为0.214 m,由此可见,采用分段拟合法生成的轨迹线地图,定位精度较高,一致性较好。

图8 定位匹配结果
4 车载雷达检测区域模型构建
检测区域构建图解见图9,其中:xoy坐标为轨迹线所在的工程坐标系,xroryr为车载雷达运动坐标系;x轴方向始终与雷达在该轨迹线位置点处的切线方向一致;Low、High分别为检测区域近、远边界距车载雷达坐标原点的距离;a点和b点分别为检测区域近边界和远边界与铁路轨迹线的交点。

图9 检测区域构建图解
4.1 检测区域远近边界定位
Step1车载雷达定位。列车运行时实时获取GPS定位信息并经坐标转换后转化到工程坐标系中,将转换后的定位位置点代入轨道地图多项式中进行匹配,即可得到当前车载雷达在轨道地图中的位置(xr,yr)。
当列车在山区或隧道中运行时,GPS信号无法接收,无法实现定位,此时则可根据列车运行的实时速度对列车行驶距离进行估算,实时推测雷达在轨迹线中的位置,其具体实现过程如下:
(1)列车进入山区或隧道时,GPS会失去定位信息,此时取GPS最后的定位信息(xr,yr)来确定定位点所处的轨迹线方程。
xstarti≤xg≤xendii=1,2,…,n
(20)
式中:i为所属第几段线元;xstarti为第i段线元起点横坐标值;xendi为第i段线元终点横坐标值。
(2)从GPS失去定位信息开始,每隔一个雷达探测周期T,从列车速度传感器中获取列车运行速度,记为vj。同时,每一个雷达周期T计算一次雷达距离GPS最后定位点(xr,yr)的距离Sj。
(21)
(3)每隔一个雷达周期T推算一次雷达当前在轨迹线中的位置,记为(xraj,yraj),作为雷达定位位置点。
(22)
综上,当GPS无法提供位置信息时,可利用列车速度传感器提供的列车当前运行速度进行轨迹推算,实现雷达定位。当GPS重新获取到位置信息时,立刻对定位信息进行修正。
Step2Low和High的确定。检测区构建示意见图10,其中:坐标原点对应雷达的发射中心,y轴为雷达的发射中轴线;4.88 m为列车安全运行的横向轮廓值,0.4 m为误差补偿值;Low值为检测区近边界距雷达中心点的距离,High值为检测区远边界距雷达中心的距离;Low值设定为50 m,High值由雷达的量程决定,其值为600 m。
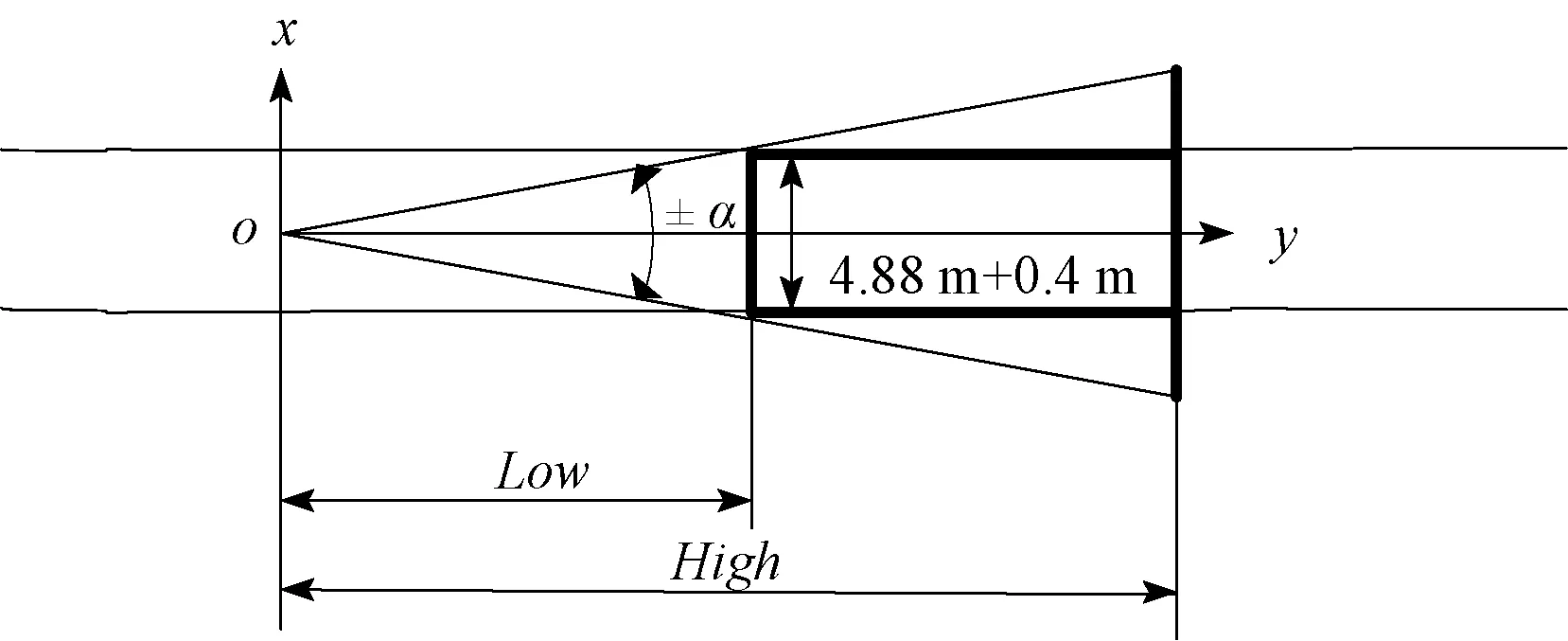
图10 检测区构建示意
Step3a点和b点坐标的确定。设检测区域近边界点a在工程坐标系中的坐标位置为(xa,ya),远边界点b在工程坐标系中的位置坐标为(xb,yb),则
(23)
(24)

4.2 检测区域边界方程求解
根据4.1节获得的近、远点a、b的坐标进行检测区域边界求解,其示意图见图11,具体求解步骤如下。
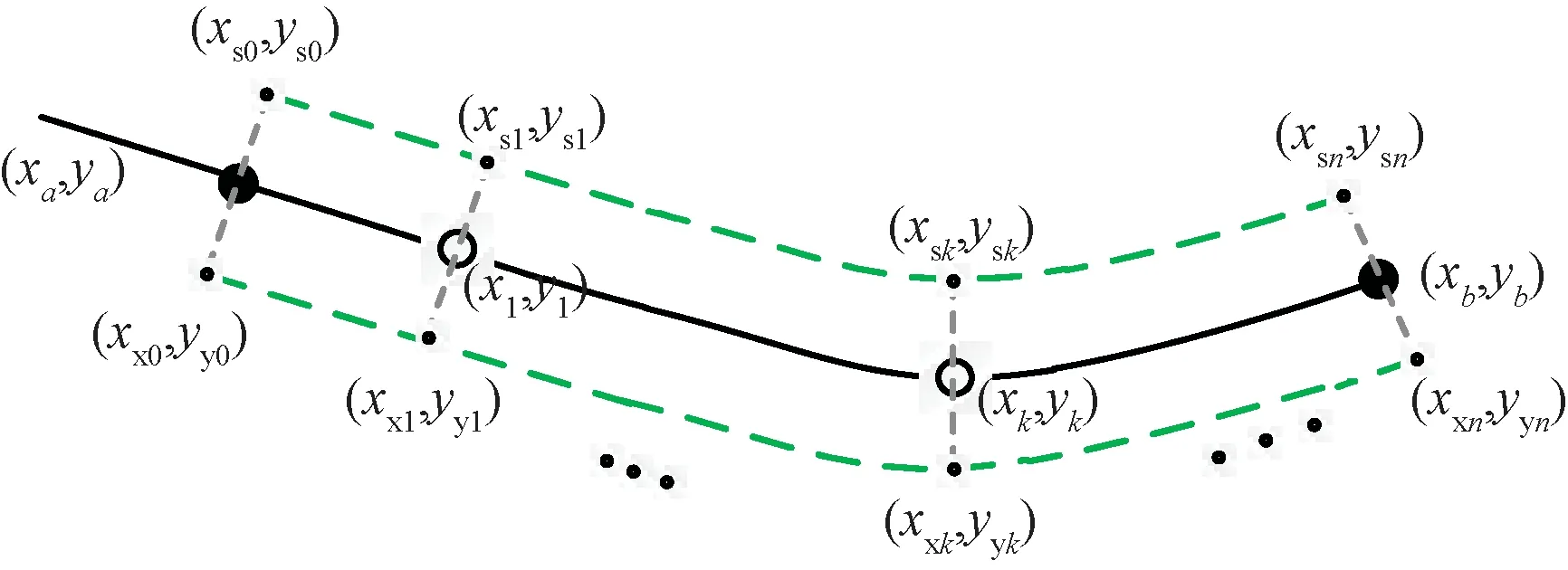
图11 检测区域边界求解示意
Step1根据获取的检测框起点坐标(xa,ya)和终点坐标(xb,yb)求解(xi,yi)。
(25)
式中:yi=l|x=xi为当x=xi时,曲线l处纵坐标对应的值。
Step2求解(xi,yi)处的切垂线值kqci。
(26)
Step3求解定位检测框左右边界各经过的n+1个点迹坐标(xsi,ysi)和(xxi,yxi)。
(27)
(28)
Step4根据获取的左右边界各n+1个坐标点对其进行曲线拟合,获取检测区域左右边界方程。通过Step3获取到定位检测框左右边界各经过的n+1个点迹坐标(xsi,ysi)和(xxi,yxi)后,对点迹坐标做整体最小二乘拟合。由于铁路轨迹线由直线线元和曲线线元共同组成,故可将拟合曲线类型设定为多项式表达式,利用使偏差平方和最小方法进行多项式最小二乘拟合,得其左右轨迹线检测框的目标函数,具体表达式为
(29)
式中:asj和axj分别为多项式的拟合系数;n为拟合点数;m为拟合多项式最高次数。对式(29)求解即可获得检测区域左右边界方程为
(30)
根据以上推导的检测区域构建模型在Matlab中进行仿真验证。设列车在第一段轨道区段上运行,且此时由GPS提供的位置坐标,经地图匹配后在轨道地图中的位置点为(100.013,175.753)m,其仿真结果见图12。

图12 检测区域构建仿真结果
5 目标坐标变换及检测判决
5.1 平面坐标变换
图13 车载雷达运动坐标与工程坐标转换
Step1获取旋转角度θ。经上述分析可知,旋转角度θ即为车载雷达运动坐标系中xr轴与工程坐标系中x轴的夹角,由于xr轴方向为车载雷达在工程坐标点(xr,yr)处轨迹线的切线方向,故旋转角θ满足
(31)
Step2车载雷达运动坐标系旋转变换。
(32)

(33)
5.2 障碍物检测判别
将计算获得的目标基于工程坐标系的位置坐标(xo,yo)代入检测区域方程中进行检测判断,判断目标点是否在检测区域之内,具体步骤如下。
Step1横轴初选。若目标点在x轴上满足式(34),则执行Step2,否则结束,输出判别结果为非障碍物。
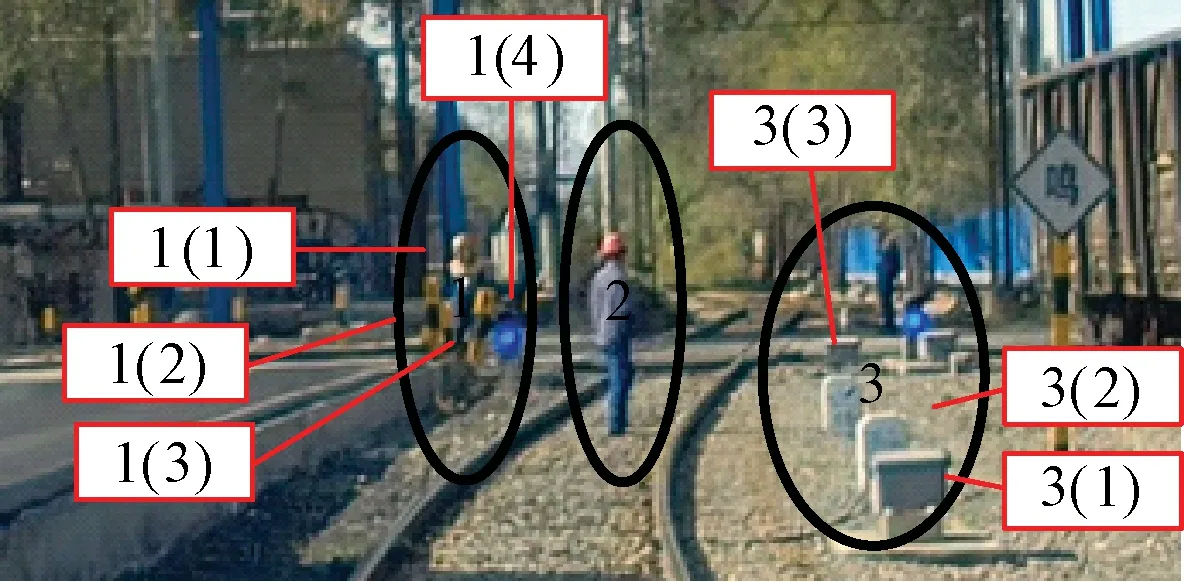
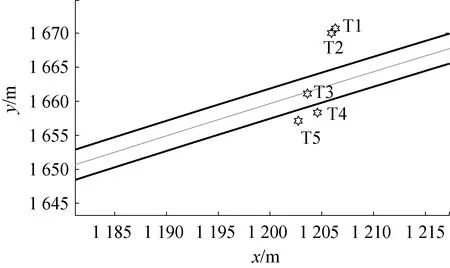
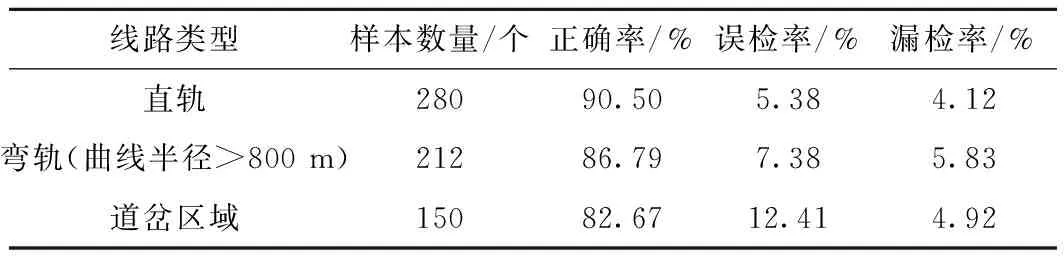
min{xsi,xxi} (34) Step2纵轴判别。当Step1满足时,将xo代入检测区域边界方程中,获取对应的纵坐标值,记为yso和yxo。若检测区域上下边界方程中有一个无对应的纵坐标值,则输出判别结果为非障碍物;若均存在对应的纵坐标值,且纵坐标值yo满足式(36),则判别为存在障碍物。 (35) yxo (36) 本研究实验检测所用雷达探测周期为187 ms,可同时检测16个动态目标和180个静态目标,通过Matlab2018a编程实现。所用计算机系统为Windows10,系统CPU为2.3 GHz的Inter(R) core(TM) i5-8300H处理器。 直轨实验实例展示如图14所示,在铁路线路旁设定3个障碍物目标,目标1设置在限界内方,目标2和目标3均位于限界外方,车载雷达在铁路线路上随列车以15~25 km/h的速度行驶,并实时获取前方行车环境信息。雷达探测到的设定障碍物位置信息见表2。 图14 直轨障碍物设定图示 表2 雷达探测障碍物位置信息(直轨) 对表2中的雷达测试数据利用式(1)消除误差,得到处理后的雷达检测数据,见表3。 表3 误差处理后的雷达检测数据(直轨) 将表3中的雷达检测数据代入式(31)~式(36)中进行障碍物检测判别,其仿真结果见图15,并在Matlab界面中提示目标1为障碍物。 图15 直轨障碍物检测仿真结果 弯轨实验实例展示如图16所示,在铁路线路旁设定3组障碍物目标组,组1中包含有4个预设障碍物目标,组2中含1个预设障碍物目标,组3中含3个预设障碍物目标,车载雷达在铁路线路上随列车以15~25 km/h的速度行驶,并实时获取前方行车环境信息。雷达探测到的设定障碍物位置信息见表4。 图16 弯轨障碍物设定图示 表4 雷达探测障碍物位置信息(弯轨) 对表4中的雷达测试数据利用式(1)消除误差,得到处理后的雷达检测数据,见表5。 表5 误差处理后的雷达检测数据(弯轨) 将表5中的雷达检测数据代入式(31)~式(36)中进行障碍物检测判别,其仿真结果见图17,并在Matlab界面中提示T3为障碍物。 图17 弯轨障碍物检测仿真结果 将图17的仿真结果与图16设定的障碍物标定点进行比较可得:组1中4个预设障碍物目标检测出2个,编号为T1和T2;组2中1个预设障碍物目标检测出1个,编号为T3;组3中3个预设障碍物目标检测出2个,编号为T4和T5。由此可知,组1和组3均存在目标丢失现象。多次测试调整预设障碍物之间的间距可知,多目标检测时,由于雷达精度的制约,若目标体之间的间距小于0.35 m,雷达检测时将其视为同一个目标。 选取642帧雷达测试数据来验证所提方法的合理性及检测准确性,其实验结果见表6。 表6 算法实验结果 由表6可知,本文提出的检测方法直轨检测正确率为90.50%,弯轨(曲线半径>800 m)检测正确率为86.79%,道岔区域检测正确率为82.67%,平均正确率为87.45%。而采用文献[10]检测平均正确率为87.14%,且文献[10]在道岔区域时检测性能和本文提出的检测方法相比有明显差距。由此可以看出,本文提出的基于雷达的障碍物检测方法检测能力相较于文献[10]略有提高。 通过分析直轨、弯轨及道岔区域的检测结果可知,其直轨相较于弯轨和道岔区域检测结果准确率更高,分析其原因主要是利用GPS进行轨迹线拟合时,由于拟合铁路线路与实际铁路线路之间有偏差,进而导致构建的检测区域与实际情况可能存在一些偏差。 (1)本文针对目前机器视觉及机器视觉和雷达融合检测列车运行前方障碍物时,存在环境适应能力差及对距离判别能力差两方面问题,提出利用雷达进行列车运行前方障碍物检测的研究。 (2)通过对GPS提前测得的线路数据进行处理,得到轨道地图分段多项式表达式;利用GPS位置信息与轨道地图实时匹配,确定雷达在轨道地图中的位置点,同时,结合铁路限界和雷达的设置参数构建列车前方检测区域;将雷达实测的目标点数据通过预处理消除系统误差,并将预处理后的目标点位置信息经过坐标变换后,代入构建的检测区模型中进行判决。 (3)在多种环境场景下进行实验,实验结果表明,本文提出的方法可以较有效地检测出列车前方障碍物。但是,本文提出的检测方法检测准确率仍有待于提高。后续工作应进一步探索更精确的铁路轨迹拟合方法,提高检测正确率,以期能够实现工程应用。6 仿真实验与结果分析
6.1 直轨实车实验及仿真验证实例展示



6.2 弯轨实车实验及仿真验证实例展示


6.3 检测性能评价
7 结论
