一种基于涡流传感器的金属线膨胀系数测量方法
2021-05-13邓玉萍杨智博李国军张毅宁
邓玉萍,杨智博,崔 群,李国军,张毅宁,张 洁
(鞍山师范学院 物理科学与技术学院,辽宁 鞍山 114007)
金属线膨胀系数的测量是大学物理实验的基本内容之一.在一定温度范围内,原长度为l的金属杆件受热后,其伸长量Δl与原长度l和温度的增加Δt近似成正比,即Δl≈αlΔt,α称为线膨胀系数.测量金属线膨胀系数实验中存在的主要问题是怎样测量由温度变化引起被测金属件长度的微小变化量Δl.普通物理实验室现有的金属线膨胀系数测量方法是利用光杠杆法进行测量,由望远镜、反射镜、标尺、支架等组成的“光杠杆”系统对金属杆件因加热产生的微小长度变化量进行放大测量.该方法的优点是将力学中的杠杆原理与光的反射定律巧妙地结合在一起,将微小的长度变化有效地放大;缺点是操作烦琐,由于引入测量参数较多,产生的测量结果误差较大.
1 光杠杆法测量实验存在的问题
(1)物理实验室现有测量金属线膨胀系数设备采用的是光杠杆法测量微小长度变化量:调节望远镜,观察直尺在平面镜中的像,随着温度升高,被测金属件长度伸长,像的位置发生改变.当记录读数时,望远镜中像的读数和温度计的读数不能实现同步测量,存在随机误差.
(2)读数望远镜的调节较为复杂,系统误差主要来源于光杠杆和尺度望远镜组成的读数装置.由于测量的参数较多,包括金属杆件微小伸长量、光杠杆长度、光杠杆镜面到直尺的距离,产生的系统误差较大.
(3)实验所用器材较多,操作不易准确调节,温度计、反射镜都是玻璃制品,学生在操作过程中,反射镜和水银温度计经常被摔坏.温度计损坏后,水银不易清理,产生环境污染.
基于上述原因,思考采用另一种实验设备和实验测量方法,通过查阅资料和阅读文献,了解到涡流传感器可以把距离的变化转换为电压的变化,来测量微小位移.电涡流传感器是一种非接触、高线性度、高分辨力的计量工具,可以实现非接触测量.
2 采用涡流传感器的金属线膨胀系数的测量
2.1 涡流传感器工作原理

图1 电涡流传感器工作原理
电涡流传感器是基于电涡流效应制成的,如图1所示,探头里设有小型线圈,由高频振荡电路控制其产生振荡电磁场H1.当探头接近涡流感应片时,感应片表面会产生感应电流,而感应电流同时又产生了与探头线圈振荡电磁场相反的电磁场H2.由于反向电磁场的作用,当探头与感应片之间的距离发生变化时,探头中线圈的品质因数Q(Q=ωL/R,ω为工作角频率,L为电感,R为等效电阻)值也发生变化.Q值的变化引起振荡电路中振荡电压幅度的变化,经检波电路处理后得到相应的直流电压值,这样电涡流传感器就可以根据反向电磁场强度的变化来判断被测体长度的微小变化[2-3].
2.2 实验原理和操作过程
2.2.1 实验设备和测量原理 改进的实验设备结构框图如图2所示,主要由全封闭加热盘、绝热连接杆、涡流感应片与探头、处理电路、磁场屏蔽罩和螺旋测微计等部件构成.涡流感应片与探头构成涡流感测部分,屏蔽罩用于减小磁场对测量参数的影响,信号处理电路是由振荡电路、检波电路、滤波电路组成.全封闭加热盘采用电热式加热,被测量金属杆件受到整体均匀加热,加热温度通过传感器和对应的处理电路测量显示.定位调节件用于被测件的轴向初始定位和调节,涡流感应片通过绝热杆件与被测件接触,与被测件同步移动,从而改变与涡流传感器探头的微小间距.这一微小间距变化由处理电路换算成电压信号,由电压显示器显示.

图2 金属线膨胀系数测量实验设备结构示意图

2.3 实验数据测量与分析
2.3.1 测量数据 见表1、表2、表3.

表1 位置坐标S与电压U定标参数

表2 铜棒长度测量参数

表3 加热温度T与对应电压U测量参数
2.3.2 数据处理与讨论
(1)根据涡流感应片与探头之间的位置坐标S与电压U的测量数据绘制出定标拟合曲线如图3、图4.
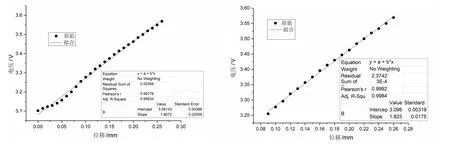
图3 全体数据U—S定标测量直线 图4 线性数据段U—S定标拟合直线
(2)利用图3全体数据拟合直线U=1.907 2X+3.031 4,根据电压值计算出对应的S1值;利用图4线性数据段拟合直线U=1.823 3X+3.098 8,根据电压值计算出对应的S2值,见表4.

表4 铜棒加热伸长计算值
(3)利用逐差法计算铜棒的平均伸长量Δl,见表5.

表5 铜棒的平均伸长量Δl和线膨胀系数α
(4)定标讨论:全体定标数据中因为螺旋测微器的初始间隙、涡流传感器的感应磁场稳定性、测量间距定位基准的线性区域查找等因素的影响,造成数据初始阶段的非线性略高.定标数据的后半部分因为进入稳定的线性工作区,数据的线性状态良好.因此,如果实验中采用定标数据的线性部分作为定标拟合的原始数据和测量区域,可以获得良好的实验效果,产生的实验误差较小.这一点可以在图3与图4的对比中看出,实验中被测量的铜棒长度变化由定标数据的线性区域测量,因此如果采用线性数据段拟合直线U=1.823 3X+3.098 8作为定标直线,更加符合实际情况.
(5)数据对比:表6为一组光杠杆法测量的典型数据,光杠杆d1=27 mm,尺镜距离d2=1 703.67 mm,杆长l=497.37 mm.采用逐差法计算得到相同材质铜棒的线膨胀系数为17.4×10-6·K-1,相对误差为4.19%.可以看出采用电涡流传感器法的测量精度优于光杠杆法.

表6 光杠杆法测量参数
3 结论
采用电涡流传感器法测量金属的线膨胀系数与采用光杠杆法相比,实验仪器操作简单,观测方便,避免了光杠杆法因测量参数过多产生的实验误差.从实验教学角度,可以增加一种微小距离的测量方法,引导学生理解数据定标的概念,拓宽了实验教学内容.仪器的教学推广成本低廉,改装简单易行,具有足够的可操作性.
