采用物流车辆V2V通信数据的实时路况计算方法
2021-05-12刘源
刘源
摘 要:提出了一种基于V2V通信的车辆前方道路实时路况的预测方法,该方法可在不增加通信负载的前提下,快速预测道路拥堵情况。首先,根据V2V通信的特点,建立广播信息的数据类型列表,并按规则清洗数据;然后,提出采用瞬时速度和5min内平均速度作为评价道路拥堵情况的指标,并给出等级划分标准;接着,利用车头方向和GPS坐标变化率筛选出车辆即将通行道路上车辆的广播信息作为分析数据;最后,利用模糊C值聚类算法(FCM)对样本聚类,将所有聚类中心坐标进行加权,得到该路段车的瞬时速度和平均速度值。通过实例分析,该方法得到的道路预测结果与实际情况相符,是一种有效的实时路况计算方法。
关键词:V2V通信;实时路况预测;综合加权;FCM
中图分类号:F252 文献标识码:A
Abstract: A real-time road condition prediction method based on V2V communication is proposed, which can quickly predict the road congestion without increasing the communication load. Firstly, the data type list of broadcast information is established according to the characteristics of V2V communication, and the data is cleaned in accordance with some rules. Then, the instantaneous speed and the average speed within 5 minutes are used as the indicators to evaluate the road congestion, and the grading standards are given. After that, the broadcast informantion coming from vehicles on approaching section should be sreened by the locomotive direction and the change rate of GPS coordinates, so as to are used to screen the broadcast information which come from vehicles on the road to be passed as analysis data. Finally, the fuzzy C-Means algorithm is used to cluster the samples. All the coordinates of cluster centers are weighted to obtain the instantaneous speed and average speed in this section. Through analysis of an example, the road prediction results obtained by this method are consistent with the actual situation. This suggests that it is an effective method to predict real-time road condition.
Key words: V2V communications; predict of real-time traffic condition; comprehensive weighted; FCM
物流作为国家发展的重要经济命脉,利用先进技术提高物流车辆的全面感知能力、智能交互能力,是提升运输效率、节约能源和改善环境的重要途径。当物流车辆进入城市路网时,由于对前方路况缺乏预判,常常遇到道路拥堵问题,频繁的启停不仅会劣化车辆的燃油经济性,而且容易引发交通事故。造成这种现象的原因是由于物流车辆无法感知周围车辆信息,不能形成实时路况判断。
对于道路短时间内的路况预测,主要分为基于模型的预测算法和数据驱动的预测算法[1]。基于模型的路况预测代表性算法主要有卡尔曼滤波模型[2]、基于时间序列模型[3]。这类模型在处理动态、非线性数据上存在缺陷。数据驱动的路况预测方法主要是指对非线性数据具有良好处理能力的各种机器学习算法。文献[4]采用Canopy算法设定聚类中心和个数,改进后的模糊C值算法能够获得路段中车辆的平均速度。文献[5]提出了一种基于K—近邻算法的交通拥堵指数预测模型,预测在考虑多重外部因素影响下的中短期交通状况。文献[6]提出了一种利用生物智能算法优化的小波神经网络模型,对道路定点采集数据进行了短时路况预测,获得了较高的预测精度。文献[7]将客车占比引入LSTM神经网络模型,改进了短时交通流预测模型,提高了预测精度。这类数据驱动方法,利用道路固定设施和浮动车辆采集的数据可进行较高精度的建模分析,但是样本获取较困难且对样本数量要求较高,在历史数据不足的情况下,模型训练将达不到预期的预测精度,且模型的计算复杂度较高。
作为智能交通的重要组成部分,车辆基本能够具备感知周围环境的能力[8]。基于C-V2X(Cellular-V2X)技术标准的V2V通信速率已经可以满足实时路况预测的要求。近年来,已发展出多种利用V2V信息交换预测交通拥堵检测方法,例如:将前车检测到的拥堵信息后向傳播的CoTEC(Cooperative traffic congestion detection)[9],利用车辆行驶速度、车流密度以及交通拥堵评级体系构建模糊控制器预测本地交通拥堵情况的方法[10]。这些算法需要与邻近车辆频繁通信验证预测结果,通信负载较高,通常只在车辆已经检测到拥堵时才触发V2V通信。
對于物流车辆而言,同一运营机构所属的物流车辆数量较大,且相互间已具备基本数据交换设备,完全可以利用V2V通信实时预测路况。在不增加通信负载的情况下,本文提出了一种基于模糊C值聚类算法的实时路况模型,该模型通过预测道路瞬时速度和平均速度来判断拥堵情况。首先,通过对V2V通信交换数据的相关性分析,筛选出与当前路段实时路况相关的数据构成样本集合,然后,将所有样本按属性特征聚类,获得能够体现样本特征的聚类中心,最后将各聚类中心属性特征进行加权,计算出前方路段的瞬时车速和平均车速,对照道路拥堵评级划分标准获得最终的实时路况预测结果。该预测结果能够有效帮助物流车辆及时做出分流、避让等决策,不但可以提高运输的经济性,也可提高运输的安全性。
1 基于V2V信息交换采集数据
1.1 V2V通信交换的数据类型
V2V通信是通过PC5接口的短程直通式通信方法[11]。这种通信方式具有通信距离短、延时低、可靠性高的特点,并支持车辆间单播和组播功能,非常适合同一运营机构所属物流车辆间的信息交换及编队行驶需求。
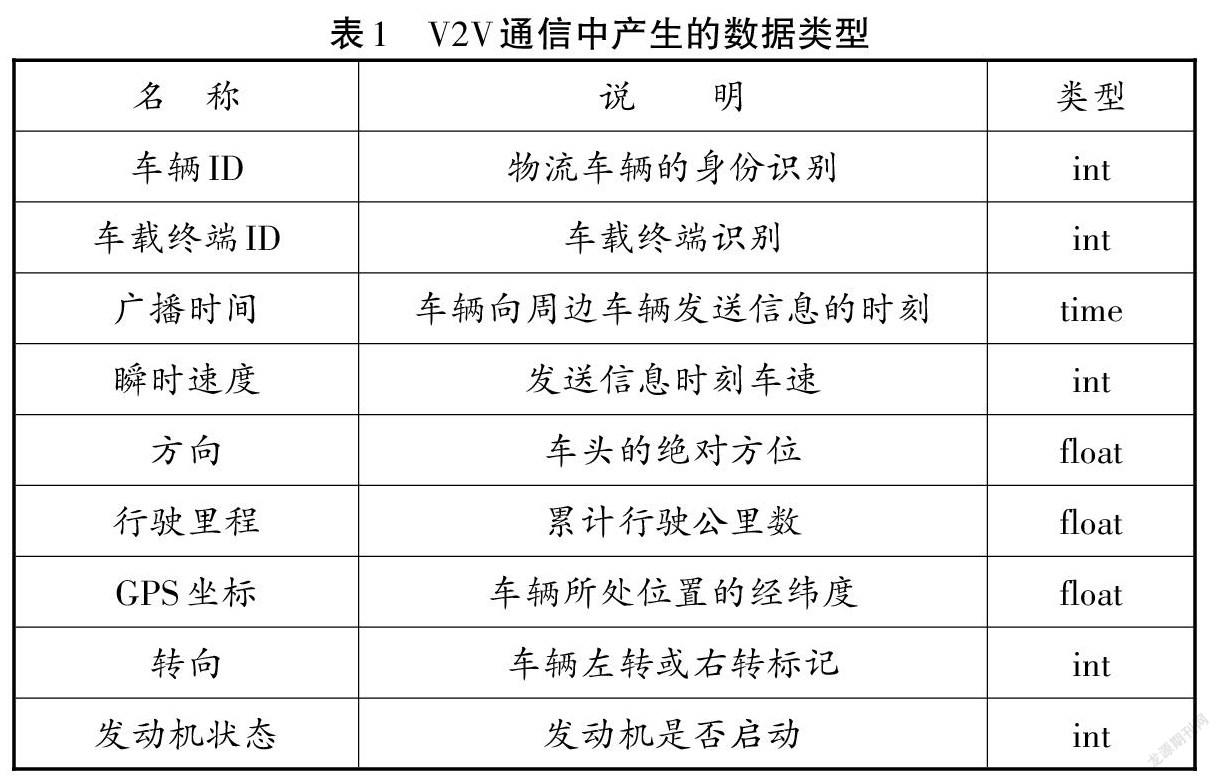
物流车辆间通过车载终端设备OBU(On Board Unit)进行相互广播通信,产生的数据类型主要为车辆基本信息和车辆实时状态信息两大类[12]。具体内容如表1所示。
物流车辆的车载OBU按一定的频率向周围OBU发送广播消息,并实时接收其他OBU发送的广播消息,及时解析获取道路实况。
车载OBU接收到的广播消息,可能会因为信号传输不稳定、遮挡、操作失误等导致采集数据失效,失效数据将成为后续输入实时路况预测模型的噪声,必须经过清洗处理,才能保证后续分析的准确性。通常,对于异常数据的判别和清理,按以下规则处理:
规则1:若车辆ID与车载终端ID不匹配,则说明数据来源错误,则直接删除该条信息。
规则2:若邻近两次数据传输中,发动机状态都为停机状态,则认为该车处于非正常行驶状态或停运状态,则直接删除该条信息。
规则3:若车辆瞬时车速大于道路规定的车速限值或为负值,则直接删除该条信息。
规则4:若邻近两次数据传输中,车辆瞬时车速均为0km/h,但车辆行驶里程变化超过500m,则直接删除该条信息。
经上述规则清洗后的数据,删除了因传输失误产生的错误数据以及车辆发生故障、事故或停运产生的非正常运行数据,其余数据将存储并上传至物流企业的监控管理平台。
1.2 数据相关性分析
在物流车辆自身构建的V2V通信网络中,每一辆车都是以本车所处地理位置为圆心、通信范围为半径(<300m),向周边物流车辆发送和接收广播消息,其信息来源车辆可能处于与该接收信息车辆同向、反向、转弯等位置状态。物流车辆预测道路实况的目的是为了获取该车辆预计前向通行路段的拥堵情况,若发生拥堵,则向车辆告警,帮助车辆做出是否改变运行轨迹的决策。因此,在所有采集到的信息中,应筛选出与车辆准备通过路段紧密相关的数据信息,才能保证预测结果的准确性,满足物流车辆的需求。
而与车辆即将通过路段最为相关的数据应来自于该车运行前方车辆发出的广播信息,如图1所示。以该运行车辆车头方向来判断该车的运行方向,过该车GPS定位坐标且垂直于运行方向上做一条直线,在车辆前进方向做一条平行该线的直线,两条直线相距300m。这两条直线之间所框定的范围为车辆前向范围。根据V2V通信的特点,该车能够接收到以该车坐标为圆心,最大通信范围(300m)为半径的圆内所有车辆所广播的信息。在这些信息中,只有来自于GPS坐标落入两直线框定的前向范围内车辆的才是有效信息。
通过上述筛选,就得到了与车辆前方道路密切相关的数据。但是,如在车辆运行前方有十字路口,那么,在接收到的前方车辆信息中会包含与车辆运行方向平行和垂直两种类型车辆发送的广播信息。这两类信息分别反馈了十字路口中两条相互垂直道路的通行情况。为了更加准确的预测车辆预计通行道路的实时路况,在十字路口处,应根据该车辆直行或转向操作来分情况讨论。
假设第t次发送广播信息时,车辆的经纬度坐标为P,Q,在经过ΔT时间间隔再次发送车辆经纬度坐标为P,Q,则可以计算出两次采样时间间隔中车辆经度和纬度的变化率:
ΔP= (1)
ΔQ= (2)
若ΔP>ΔQ,则说明车辆在东西方向上的位置变化比南北方向上的位置变化程度更大,总体应判断为东西方向行进;反之,则总体应为南北方向上行进。
按式(1)和式(2)计算出该车和落入前向范围内的所有广播车辆的GPS坐标变化率。
情况1:当前车辆预计直行时(转向灯未亮起),筛选与该车具有相同坐标变化规律车辆所广播的信息作为分析数据。
情况2:当前车辆预计转向时(转向灯亮起),筛选与该车具有相反坐标变化规律车辆所广播的信息作为分析数据。
2 基于FCM算法的实时路况模型
2.1 道路拥堵情况评价指标
由于对城市道路通行优化的目标不同,既有局部的机动车道调整优化、交叉路况通行效率优化,又有全局的结构调整优化,其对应的道路拥堵情况的评价指标也不尽相同[13]。由于V2V通信距离短,前后车通过相同路段的时间间隔较短,因此,对于路况通行情况的评价指标应采用瞬时指标和短时间内的均值指标。故本文提出用瞬时车速和5min内平均车速来作为评价指标。5min内平均车速可以用时间间隔5min的两次采样数据中的行驶里程来计算。
通行路段的平均车速是最直接反映拥堵情况的指标。通常,道路的拥堵程度可划分为“畅通,较畅通,轻度拥堵,中度拥堵,重度拥堵”五个等级[14]。物流车辆通行道路多为城市主干道,因此,给出了在城市主干道5min内平均车速等级划分标准,如表2所示。
瞬时车速虽然不能直接体现道路的拥堵情况,但是该项指标为后续通过车辆给出了通行时车速的参考。一般来说,车辆的瞬时车速较高,说明车辆当下的运行状态良好,也从侧面反映了道路通行情况良好。若车辆的瞬时车速与路段平均车速较接近,说明在该路段车辆能够以较均匀的车速行驶;若车辆的瞬时车速与路段平均车速相差较大,说明车辆通过该路段是启停操作较频繁,或者遇到突发情况。
2.2 基于特征加权的FCM算法
模糊C值聚类算法(Fuzzy C-Means,FCM),将模糊概念引入硬C均值聚类算法中,实现每个数据对聚类中心的软分
类[15]。FCM算法中每个数据点对聚类中心的隶属度在0,1范围内可变,以目标函数最小化为目标,循环迭代更新隶属度矩阵和聚类中心,最终实现数据的分类。
设样本集合X=x,x,…,x中有n个样本,每一个样本都具有k个属性,则每一个具有k个属性的样本x都对应特征空间中的一个点。将样本集合中的所有数据按m个聚类中心C进行划分,其划分的依据为样本x对该聚类中心C的隶属度u
∈0,1,从而得到隶属度矩阵:
U=u (3)
样本对各聚类中心的隶属度应满足:
u=1, ?坌j=1,2,…,n (4)
定义FCM算法的目标函数为:
J=ud (5)
其中:l∈[1,+∞)為隶属度因子。
d为第j个样本到第i个聚类中心的欧式距离:
d= (6)
求解目标函数J最小化的条件,可得到隶属度u和聚类中心C的迭代更新公式:
c= (7)
u= (8)
当第K+1次迭代后,其隶属度不发生较大变化时,即小于设定的误差阈值ε时,则认为隶属度已达到较优值,目标函数收敛于局部极值点,迭代停止:
maxu-u<ε (9)
式中:K為迭代步数;ε为误差阈值。
迭代结束可得到最终的隶属度矩阵U和聚类中心矩阵C。
采用FCM算法构造实时路况计算模型时,由该时段采集的有效数据构成样本集合X,每一个样本都包含车速V和公里数L(5min)2种属性。由于V2V通信车辆数量较少,且城市道路中车速变化范围不大(0~80km/h),因此,模型选择3个聚类中心进行划分。
首先,在0,1区间随机抽取数值构造初始化隶属度矩阵,且满足式(4)中的约束条件。然后,计算所有采集的车辆运行样本到3个聚类中心C的距离,代入公式(7)和式(8)更新聚类中心和隶属度矩阵。若未达到终止迭代的条件,则重复公式(7)、式(8)计算,继续跟新聚类中心和隶属度矩阵,直到目标函数收敛于极小值点,迭代终止,此时将输出聚类中心坐标矩阵和隶属度矩阵。聚类中心坐标矩阵给出了3个聚类中心的瞬时速度V和公里数L,可以求出该聚类中心的平均速度为:
=×60 (10)
隶属度矩阵给出了每个数据样本对聚类中心的隶属分类,由此可以统计出每个聚类中心所聚集的样本数量n。聚类中心的速度特征最大程度的代表了聚集在该中心样本的特征,而聚集样本数量最多的聚类中心特征最能体现出该时段所有采集样本的速度特征。但是,仅以最大聚类中心的特征来表征该时段车辆运行的瞬时速度V和平均速度,会丢掉其他数据样本所包含的信息,因此,需综合考虑其他聚类中心的特征对该时段车辆运行速度估算的贡献。为此,根据各聚类中心的聚类数量引入权重W=·100%,将聚类中心的特征加权后,获得该时段所有车辆通过时的平均速度的估算值以及后续车辆通过时可能的瞬时速度预测值:
V=V·W (11)
=·W (12)
最后,对照道路拥堵情况等级划分标准确定前方道路的实时拥堵情况。至此,构建了基于FCM算法的实时路况模型,其计算基本流程如图2所示。
3 实例分析
3.1 实例数据及算法参数
本文选择郑州市平安大道3km长路段作为数据采集路段,该测试路段共4个红绿灯路口,工作日7:00~9:00为早高峰,18:00~20:00为晚高峰,道路处于拥堵状态,选择晚高峰时段采集拥堵时段数据;其他时段,道路基本处于畅通状态,畅通时段数据选择上午10:00~11:00为采集时段。
畅通时段和拥堵时段分别采集50组数据(包含车辆速度和5分钟行驶公里数两个参数),即样本个数N=N=50,聚类中心个数取m=3,隶属度因子l=2,误差阈值ε取0.0000001。采用Python 3.0编程实现,分别得到畅通时段和拥堵时段的数据聚类结果图,如图3所示。各聚类中心的坐标及该类别数据数量如表3所示。
3.2 聚类结果分析
图3(a)为畅通时段采集数据的聚类结果。数据共产生了3个聚类中心,分别分布于低速、中速和高速运行区间。聚类中心1为低速运行区间的聚类点,瞬时车速约为0.18km/h,5min通过里程约为3.67km,采集数据中有3个数据点划分到该聚类中心,占比6%。聚类中心2为中速运行区间的聚类点,瞬时车速约为24.2km
/h,5min通过里程约为3.53km,采集数据中有14个点划分到该聚类中心,占比28%。聚类中心3为高速运行区间,瞬时车速约为43.1km/h,5min通过里程约为3.62km,采集数据中有33个点被划分到该聚类中心,占比66%。聚类结果表明,该时段采集的数据更倾向于聚类中心3所体现的特征。根据各聚类中心所划分数据占比对最终路况计算模型权重赋值。由此,获得该路段在该时刻的瞬时车速为35.2km/h,5min中通过里程为3.6km,则车辆在该路段短时间的平均车速约为43.2km/h。
根據路段平均行程速度等级划分,该路段短时间的平均车速>35km/h,应属于畅通,这与采集数据时的实际路况相符。该路段瞬时车速的计算结果为35.2km/h,瞬时车速也高于35km/h,说明物流车辆在该时段将大概率以较高车速行驶。但是,瞬时车速与平均车速相差较大,这是由于采集数据路段包含十字路口,车辆在路口遇红灯停运以及红灯前后时段的运行车速较缓慢,导致车辆瞬时车速计算结果低于5min内平均车速计算值。
图2(b)为拥堵时段采集数据的聚类结果。数据共产生了3个聚类中心。聚类中心1的瞬时车速约为0.7km/h,5min通过里程小于0.45km,采集数据中有11个数据点划分到该聚类中心,占比22%。聚类中心2的瞬时车速约为10km/h,5min通过里程小于0.38km,采集数据中有23个点划分到该聚类中心,占比46%。聚类中心3的瞬时车速约为20.7km/h,5min通过里程小于0.79km,采集数据中有16个点被划分到该聚类中心,占比32%。聚类结果表明,该时段采集的数据更倾向于聚类中心2所体现的特征。计算可得该路段在该时刻的瞬时车速为11.4km/h,5min中通过里程为0.5km,车辆在该路段短时间的平均车速约为6.2km/h。
根据路段平均行程速度等级划分,该路段短时间的平均车速≤15km/h,应属于重度拥堵,这与采集数据时的实际路况相符。该路段瞬时车速的计算结果为11.4km/h,也低于15km/h,说明物流车辆在该时段将大概率以低速运行。计算得到的瞬时车速高于平均车速,这是由于道路拥堵时车辆处于频繁启停状态,通常车辆起步速度高于10km/h,而车辆拥堵停运时长过长将导致计算周期内的平均车速降低,因此,车辆瞬时车速计算结果高于5min内平均车速计算值。
4 结束语
本文提出了一种基于V2V通信的车辆前方道路实时路况的预测方法,通过实例分析证明该方法可在不增加通信负载的前提下,快速预测道路拥堵情况。
(1)该方法根据V2V通信的特点,建立广播信息的数据类型列表,获取通信范围内车辆广播信息。然后,按照给出的数据清洗规则判别和删除因传输不稳定、遮挡、操作失误等造成的异常数据,将有效数据上传并存储。为了能够快速预测前方路段短时间内的通行情况,提出采用瞬时速度和5min内平均速度作为评价道路拥堵情况的指标,并给出了评价等级划分的标准。
(2)为了更加准确地判断车辆即将通行路段的实时路况,本文提出了利用车头方位划定前向道路范围的方法,只筛选GPS坐标落入该区域的车辆发送的广播信息进行分析。
(3)在车辆即将通过十字路口时,会出现直行和转向两种操作,需分别对这两种操作对应道路的路况进行预测。本文提出利用GPS坐标变化率来判断车辆运行方向。当车辆预计直行通过路口时,筛选与该车具有相同坐标变化规律车辆所广播的信息作为分析数据;当前车辆预计在路口转向时,则筛选与该车具有相反坐标变化规律车辆所广播的信息作为分析数据。
(4)本文利用FCM算法将样本集中的数据分为3类,以每个聚类中心聚集的样本数量与总样本数量的比值作为权重,将3个聚类中心的坐标进行加权综合,得到该路段所有车辆的瞬时速度和平均速度,该计算结果包含了各个聚类中心的特征,最大程度地反映出了样本集合中所有样本的特征。
参考文献:
[1] 卢生巧,黄中祥. 基于深度学习的短时交通流预测模型[J]. 交通科学与工程,2020,36(3):74-80.
[2] 白伟华,张传斌,张塽旖,等. 基于异常值识别卡尔曼滤波器的短期交通流预测[EB/OL]. (2020-09-29)[2021-03-31]. https:
//doi.org/10.19734/j.issn.1001-3695.2020.03.0070.
[3] 田保慧,郭彬. 基于时空特征分析的短时交通流预测模型[J]. 重庆交通大学学报(自然科学版),2016,35(3):105-109.
[4] 张长青,杨楠. 基于车联网大数据分析的实时路况检测系统[J]. 电子科技,2019,32(8):66-69.
[5] 韦清波,何兆成,郑喜双. 考虑多因素的城市道路交通拥堵指数预测研究[J]. 交通运输系统工程与信息,2017,17(1):74-81.
[6] 刘宝,吴宗德,杨金莹. 生物智能算法优化小波神经网络研究及其在交通流预测应用[J]. 北京交通大学学报,2020,44(5):17
-26.
[7] 翁小雄,郝翊. 基于LSTM引入客车占比特征的短时交通流预测[J]. 重庆交通大学学报(自然科学版),2020,39(11):20-25.
[8] 徐侃春. 基于车联网的智能交通系统研究[J]. 铁路计算机应用,2018,28(3):57-59.
[9] Bauza R, Gozálvez J. Traffic congestion detection in large-scale scenarios using vehicle-to-vehicle communications[J]. Journal of Network and Computer Applications, 2013,36(5):1295-1307.
[10] 王润民,刘丁贝,胡锦超,等. 车联网环境下基于模糊逻辑的交通拥堵检测方法[J/OL]. 计算机应用研究(2019-05-14)[2021
-03-31]. https://doi.org/10.19734/j.issn.1001-3695.2018.10.0894.
[11] 心睿,王润民,石娟,等. 典型V2X通信技术标准化进展及对比分析研究[C] // 2020中国汽车工程学会年会论文集,2020:151-156.
[12] 钱浩,仇成群. 基于车联网V2V的汽车自适应巡航控制系统设计[J]. 电子科技,2017,30(8):92-95.
[13] 马超,杨洪娇. 基于多源数据的城市道路拥堵优化评价方法[J]. 公路,2019(4):246-249.
[14] 上海市质量技术监督局. DB31/T997-2016城市道路交通状态指数评价指标体系[Z]. 2016.
[15] 郭松,郭广礼,李怀展,等. 基于降维模糊C均值聚类算法的采动场地稳定性评价[J]. 煤炭科学技术,2020,48(10):137-142.
