基于AGM曲线能量的配电网故障区段定位方法
2021-05-11赵建文冯泽镡
赵建文,李 璞,冯泽镡
(西安科技大学电气与控制工程学院,西安 710054)
我国配电网多为小电流接地系统,即中性点不接地或经消弧线圈接地。配电网单相接地故障发生概率高,约占其故障总数的80%,若故障发生后不及时处理,有可能扩大为相间短路等更严重的故障,影响配电网的安全稳定性[1]。因此,单相接地故障发生后,快速准确地确定故障区段,有利于隔离或消除故障,从而满足新的配电网技术导则中要求的“选段跳闸”处理方式[2]。
近年来小电流接地故障定位方法得到了快速发展,文献[3]提出利用信号注入的方式实现故障区段定位,虽然原理简单,但需要增加信号注入和检测设备,成本较高且注入信号易对系统造成冲击。文献[4]提出依据各检测点零序无功功率方向实现故障区段定位,此方法需要大量安装零序电压互感器获得零序电压信号,增加投入成本的同时易引起铁磁谐振,影响系统的安全性。随着我国智能电网建设的推进,配电网自动化系统得到了快速发展。目前,配电网中普遍装有馈线终端装置FTU(feeder terminal unit),利用FTU具有的电流互感器可获取检测点零序电流采样值,经过处理得到其故障特征量,通过配电网自动化通信系统上传到主站,由主站判断故障区段。文献[5]利用稳态零序电流相关性进行区段定位,但稳态故障特征微弱,易受环境噪声和消弧线圈补偿作用的影响。文献[6]提出根据故障点上下游暂态零序电流重心频率不同的特征确定故障位置,可以克服消弧线圈补偿作用的影响,但故障下游的重心频率很难确定。文献[7]提出基于暂态零模电流相关性的方法确定故障区段,但该方法需各检测点保持时间同步性向主站上传数据,且阀值整定困难。文献[8]提出利用动态时间弯曲DTW(dynamic time warping)算法实现故障定位,虽然该方法具有耐同步误差特性,但仍需向主站上传完整故障发生后暂态过程的数据,上传的数据量较大对通信要求较高。
本文提出一种基于暂态零序电流自适应全局平均AGM(adaptive global mean)曲线(即自适应全局均线)能量的故障区段定位方法,该方法根据故障点异侧暂态零序电流波形趋势差异显著的特点确定故障区段。首先,将各检测点FTU采集到的暂态零序电流通过极点对称模态分解ESMD(extremepoint symmetric mode decomposition)得到其AGM曲线,用来反映各检测点暂态零序电流波形趋势,并计算其能量值作为故障特征上传于主站;其次,主站计算相邻检测点暂态零序电流AGM曲线能量差,用来描述故障后暂态零序电流波形趋势的差异程度;最后,主站根据相邻检测点能量差的大小,构建判据确定故障区段。此方法无需向主站上传整段时间的采样数据,降低了通信要求,且构造的判据无需设定阀值,简单易于实现。仿真结果表明,该方法在不同故障条件下均可准确识别故障区段。
1 故障点上、下游暂态零序电流分析
具有n条馈出线的配电网发生单相接地故障零序等值网络如图1所示。故障发生于馈出线l1的F点处,为了便于分析故障特征,将故障馈出线l1故障点F的上游线路等效为2个π型结构,下游线路等效为1个π型结构,每条非故障馈出线lk(k≠1)等效为1个π型结构。
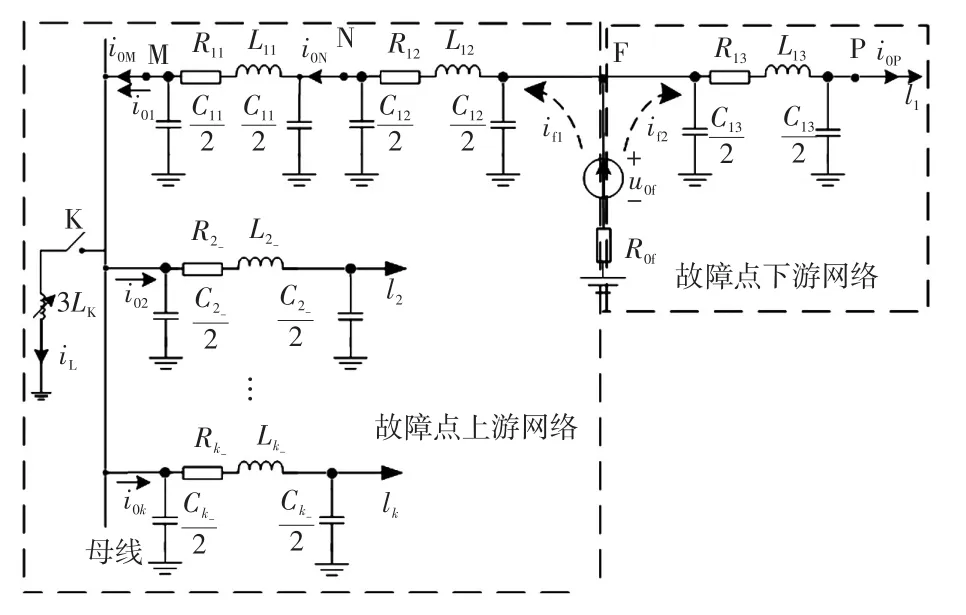
图1 单相接地故障零序等值网络Fig.1 Zero-sequence network under single-phase ground fault
由图1可知,故障点上游网络包括故障点到母线的线路、消弧线圈及非故障线路;故障点下游网络包括故障点至负荷侧线路。一般上游网络线路总长远大于下游网络线路总长,同样,上游对地电容也远大于下游对地电容,从而使上、下游两网络的暂态零序电流在幅值、主谐振频率及衰减特性等方面存在很大的差异[9]。例如:N、P两检测点分别位于故障点上、下游两网络中,则其暂态零序电流i0N与i0P存在着较大差异,从而位于故障点异侧检测点的暂态零序电流波形差异较大。然而对于故障点同侧两检测点之间的非故障区段,由于其线路长度相对于整个系统馈出线总长度较短,对地电容可忽略,因此位于故障点上游网络的M、N两检测点的零序电流i0M近似等于i0N,从而位于故障点同侧检测点的暂态零序电流波形差异较小。
图2为故障发生后故障点上、下游检测点暂态零序电流波形。由图2可知,同位于故障点上游检测点M、N的暂态零序电流波形近似相同,趋势基本一致;分别位于故障点上、下游检测点N、P的暂态零序电流波形差异较大,趋势差异明显。

图2 故障点上、下游检测点的暂态零序电流波形Fig.2 Transient zero-sequence current at the upstream and downstream detection points of fault point
2 ESMD及暂态零序电流AGM曲线
ESMD方法是希尔伯特-黄变换的新发展,善于分析非平稳信号。希尔伯特-黄变换的筛选次数难以确定,分解出的趋势函数过于粗略,而ESMD方法采用优化筛选的策略确保趋势函数和筛选次数最佳,从而得到数据的最佳分解[10]。
对时间序列Y进行ESMD处理,可依次得到频率由高到低的n条模态Mp与余量R,其关系可表示为

通过ESMD得到的各模态反映了原始信号中频率由高到低的振荡成分,从原始信号中去除各个模态后,剩余的余量R反映了原始信号的总体变化趋势,为最佳AGM曲线。
假设原始采样信号具有N个采样点,余项R={r1,r2,…,rN}为原始采样信号的AGM曲线,是由数据自动优选出来的,具有数据自适应特点,AGM曲线为

式中:yi为原始采样信号第i个采样点;mpi为原始采样信号分解出的第p个模态序列中的第i个元素。
为了度量原始信号相对于AGM曲线的偏离程度,可用原始信号相对于全局均线的方差表示,相对方差σ2可表示为




式中:σ为原始信号相对于全局均线的相对标准差;σ0为原始信号Y的标准差。
因此,在分解过程中,让每得到1个模态的筛选次数K位于设定的整数区间[ ]Kmin,Kmax内变化,重复分解过程,可得到方差比率随筛选次数K的变化趋势,找出方差比率最小时对应的筛选次数K0作为最佳筛选次数,以此筛选次数进行分解可得到数据的最优分解,分解得到的余量R为原始数据的最佳AGM曲线。
ESMD方法可用于处理单相接地故障零序电流信号,对某检测点1个工频周期内零序电流进行ESMD处理,图3为方差比率随筛选次数的变化趋势。由图3可见,在ESMD过程中并不是筛选次数越高就可以得到越好的全局均线,当K=23时方差比率最小,意味着以此筛选次数分解得到的剩余项R为数据的最佳AGM曲线,能够代表原始采样数据的变化趋势。
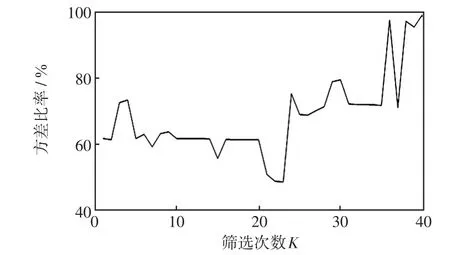
图3 方差比率随筛选次数的变化趋势Fig.3 Changes in variance ratio with screening times
模态分解时筛选次数过高会消除振幅的固有变化使模态失去物理意义[11]。ESMD方法引入了方差比率的概念,不但可以确定最佳AGM曲线,还提供最佳筛选次数从而获得最佳分解。图4为故障发生后1个工频周期的零序电流分解结果。零序电流采样序列Y经分解得到3条由高频到低频的模态和余项R,此处的余项R为AGM曲线。

图4 零序电流分解结果Fig.4 Zero-sequence current decomposition results
通过ESMD处理得到的余项R为零序电流采样序列Y的AGM曲线,反映了原始数据的整体趋势,图5为零序电流采样序列及其零序电流AGM曲线。
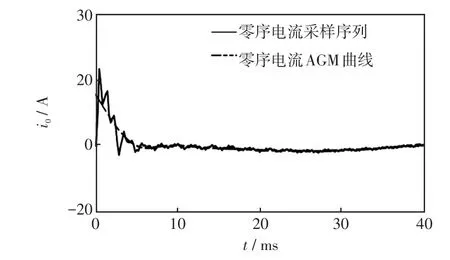
图5 零序电流及其AGM曲线Fig.5 Zero-sequence current and its AGM curve
全局均线应能反映数据总体的变化趋势,这也是“滑动平均法”和“最小二乘法”力图解决的问题,滑动平均法需要设定窗口宽度和权重系数[12],最小二乘法需要有先验的函数形式[13]。而通过ESMD得到的余项R为最佳AGM曲线,是由数据自动优选出来的,具有数据自适应特点。
对图2中故障点上游M、N检测点和故障点下游P检测点的暂态零序电流采样序列进行ESMD处理,得到的暂态零序电流AGM曲线如图6所示。由图6可见,同位于故障点上游M、N检测点的暂态零序电流AGM曲线差异小,分别位于故障点上、下游检测点N、P的暂态零序电流AGM曲线差异大。
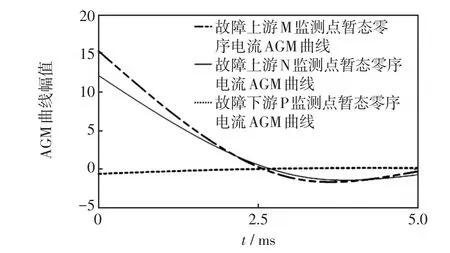
图6 故障点上、下游检测点的暂态零序电流AGM曲线Fig.6 Transient zero-sequence current AGM curve at the upstream and downstream detection points of fault point
利用暂态零序电流经ESMD处理得到的AGM曲线进行区段定位,可使区段定位方法具有如下特性。
(1)抗干扰性。采样数据中通常包含大量的高频环境噪声,常混叠于分解得到的高层模态中[14],而AGM曲线不含原始采样数据的高频模态,使得区段定位结果避免了配电网的背景高频噪声干扰。
(2)容错性。AGM曲线反映零序电流的趋势,采样过程中个别采样点的丢失或误码对趋势影响不大,因此对故障区段定位结果影响也不大。
(3)准确性。故障点上游暂态零序电流主谐振频率低,下游主谐振频率高[15],AGM曲线的频率较低,与故障点上游暂态零序电流主谐振频率基本一致,从而扩大了故障后上、下游故障特征之间的差异,提高了故障定位的准确性。
3 基于暂态零序电流AGM曲线能量的区段定位方法
3.1 区段定位原理
故障发生后采集暂态过程的N个零序电流数据,定义第m个检测点的暂态零序电流AGM曲线ri的波形能量em为

为了定量描述两检测点FTU暂态零序电流AGM曲线的差异程度,计算相邻两检测点FTU的暂态零序电流AGM曲线能量差。检测点m与m+1两检测点之间能量差为

图1中相邻检测点M、N、P间的暂态零序电流AGM曲线的能量差如图7所示。E(M,N)为同位于故障点上游M、N两检测点暂态零序电流AGM曲线能量差,E(M,N)=336 A2·s;E(N,P)为分别位于故障点上、下游N、P两检测点间的暂态零序电流AGM曲线能量差,E(N,P)=1 517 A2·s。E(M,N)<E(N,P),显然位于故障点异侧检测点间的暂态零序电流AGM曲线能量差异大,以此可确定故障发生的区段。
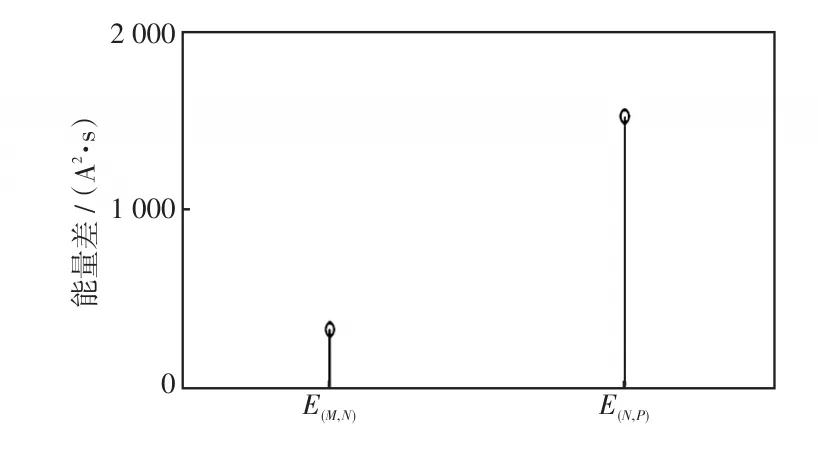
图7 相邻监测点的暂态零序电流AGM曲线能量差Fig.7 Energy difference in transient zero-sequence current AGM curve of adjacent detection points
配电网馈出线路结构通常包括无分支馈线和有分支馈线。若单相接地故障发生于含分支馈线,则首先需要根据故障零序电流的流向,搜索出1条无分支的故障路径。
图8为含分支馈线示意。由图8可知,故障发生于含分支馈线的点f处,故障电流的主要通路为含FTU4的分支1到馈线上游,所以大部分零序电流流经FTU4和FTU3,最终流向馈线上游。因此FTU3和FTU4所得到的暂态零序电流AGM曲线能量的差异小,FTU3和FTU5差异大,可得E(3,4)<E(3,5),所以根据分支处2个检测点FTU能量差值小为原则可确定故障路径。
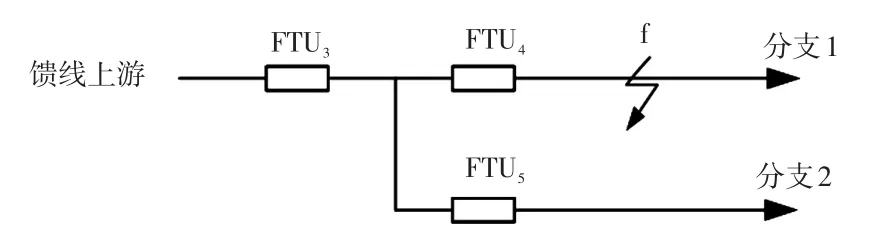
图8 含分支馈线示意Fig.8 Schematic of branch lines
确定好故障路径后,计算故障路径上所有相邻检测点之间的暂态零序电流AGM曲线能量差,构造区段定位向量E。当故障发生于无分支馈线时,可直接计算此馈线所有相邻检测点之间的暂态能量差,构造区段定位向量E,即

根据所构造的区段定位向量中最大元素maxE=E(m,m+1),可确定出故障区段为(m,m+1)。此判据无需整定阀值,仅根据相邻两检测点能量差值最大可确定故障区段,判据简单且易于实现。
传统区段定位方法将各个检测点整段时间内的零序电流瞬时采样值上传于主站判别,需要信号、时间完全同步。本文方法的暂态零序电流检测及其AGM曲线能量计算在FTU中完成,故障区段定位判别在主站实现,降低了通信速度及时间同步严格性的要求。
3.2 区段定位算法的实现流程
本文利用暂态零序电流幅值比较的方法确定故障发生的馈出线[16],确定出故障馈出线后将结果上传主站,启动区段定位程序可确定出故障区段,该方法的实现流程如图9所示。配电网中线路主谐振频率在0.3~3.0 kHz之间,为避免频率混叠,同时兼顾数据处理量,一般要求采样频率fs≥gfmax(g∈[3,4]),因此设置采样频率为10 kHz[17]。通常情况,故障后1/4工频周期(5 ms)内的零序电流信号的暂态特征最为明显,且不受消弧线圈的影响,便于准确识别故障。
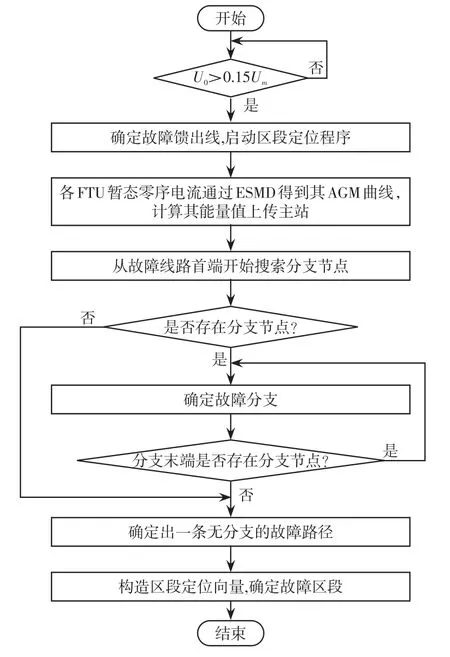
图9 故障区段定位流程Fig.9 Flow chart of fault line section location
对应的具体步骤如下。
步骤1启动故障区段定位程序。当满足中性点零序电压大于额定相电压最大值(Um)的15%时,即U0>0.15Um,通过幅值比较的方法确定故障馈出线,将结果上传于主站,启动故障区段定位程序。
步骤2计算故障特征值上传主站。对馈出线各个检测点FTU采集到的故障后1/4个工频周期内暂态零序电流信号进行ESMD处理,自适应分解得到AGM曲线并求得其能量值,各检测点FTU将能量值上传于主站,主站计算故障馈出线所有相邻检测点能量差。
步骤3搜索故障路径。从故障馈线线路首端开始搜索线路是否存在分支节点,若不存在分支,直接进行下一步;若存在分支节点,根据分支节点处相邻检测点能量差值较小确定故障分支,搜索直至线路末端,确定出故障路径。
步骤4确定故障区段。主站计算故障路径上所有相邻检测点暂态零序电流AGM曲线能量差,构造故障区段定位向量,将区段定位向量中最大元素对应的区段确定为故障区段。
4 仿真验证
4.1 仿真模型
利用Matlab/Simulink仿真软件,搭建如图10所示的10 kV配电网系统仿真模型,馈线l1长度为18 km,馈线l2长度为20 km,馈线l3含有分支线路,设l3有10个检测点,相邻检测点之间的线路为一个区段,每个区段的长度为2~3 km。线路型号为LGJ-240型,参数见表1。
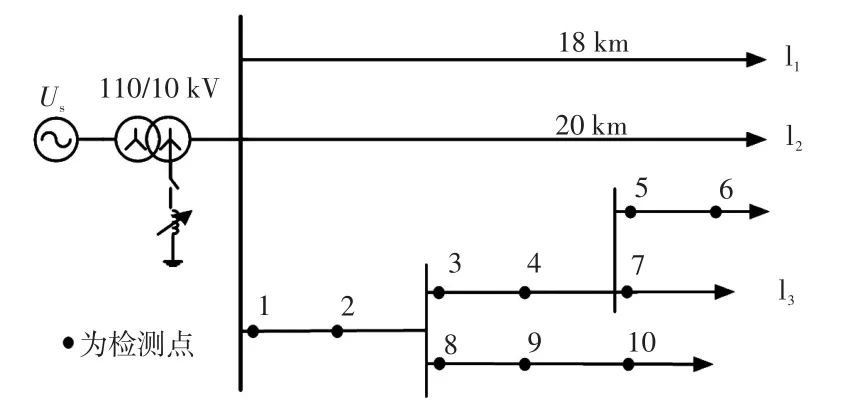
图10 系统仿真模型示意Fig.10 Schematic of simulation model of the system

表1 线路模型参数Tab.1 Parameters of line model
4.2 仿真算例
单相接地故障发生在馈线l3的区段5-6处,系统运行于谐振接地过补偿方式,补偿度P=10%,故障过渡电阻Rg=50Ω,故障初相角φ=90°。设置各采样点的采样频率为10 kHz。
图11为故障发生后故障馈线故障点上游检测点4、5和故障点下游检测点6、7的暂态零序电流。图12为故障发生后故障馈线故障点上游检测点4、5和故障点下游检测点6、7的暂态零序电流AGM曲线。可见,位于故障点上游检测点4、5的暂态零序电流波形相对于故障点下游检测点6、7的暂态零序电流波形差异较大,其AGM曲线差异较大。
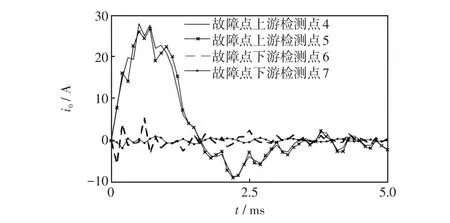
图11 检测点4~7暂态零序电流Fig.11 Transient zero-sequence current at detection points 4~7

图12 检测点4~7暂态零序电流AGM曲线Fig.12 AGM curves of transient zero-sequence current at detection points 4~7
计算故障馈线上各检测点暂态零序电流AGM曲线的能量值,上传于主站。主站计算所有相邻检测点能量差,根据分支节点处相邻两检测点能量最小原则,从故障馈线的线路首端开始搜索分支节点至末端。表2为故障路径的搜索结果,得到的故障路径为l1-2-3-4-5-6,其中加粗元素表示区段定位向量中最大元素,所在区段为故障区段。

表2 故障路径搜索结果Tab.2 Searching results of fault path
确定好故障路径后,构造区段定位向量,表3为故障区段定位结果。由结果可知,该方法可准确识别故障发生的区段。

表3 故障区段定位结果Tab.3 Result of fault line section location
4.3 方法适应性分析
设置不同故障角φ、过渡电阻Rg、故障位置及系统运行方式(中性点不接地、谐振接地过补偿P=10%、欠补偿P=-20%)进行故障仿真试验。故障位于区段3-4、5-6时搜索得到的故障路径为l1-2-3-4-5-6,故障位于区段8-9时搜索得到的故障路径为l1-2-8-9-10,区段定位结果见表4~7。可见,在不同故障条件下,位于故障点异侧两检测点间的零序电流AGM曲线能量差异显著特征始终存在,区段定位方法可准确识别故障区段,即使故障发生在高阻(Rg=10 kΩ)和小故障合闸角(φ=0°)的情况下,结果仍然准确。
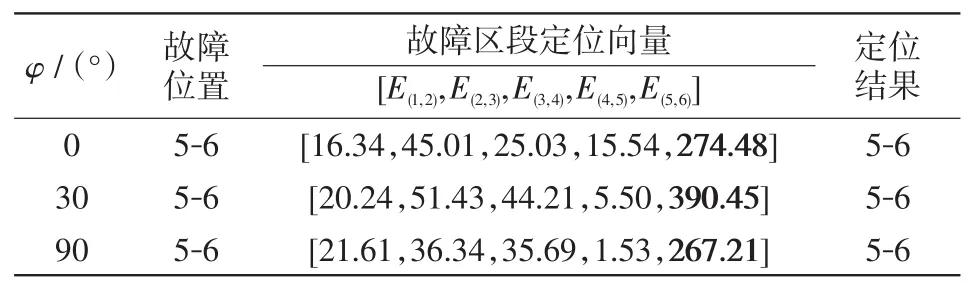
表4 不同故障角的区段定位结果(Rg=500 Ω,P=10%)Tab.4 Fault line section location results at different faultangles( Rg=500 Ω,P=10%)
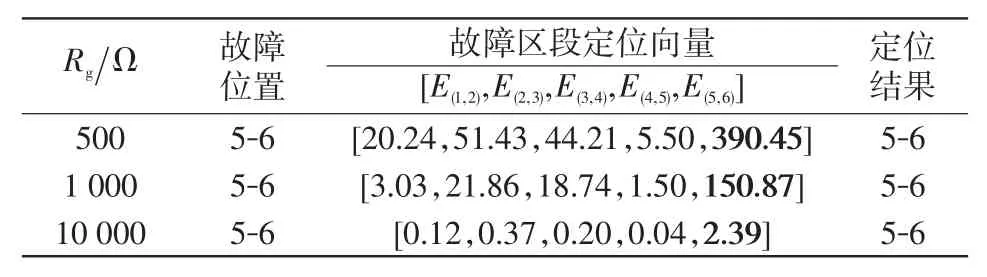
表5 不同过渡电阻的故障区段定位结果(φ =30°,P=10%)Tab.5 Fault line section location results with different transition resistances(φ =30°,P=10%)
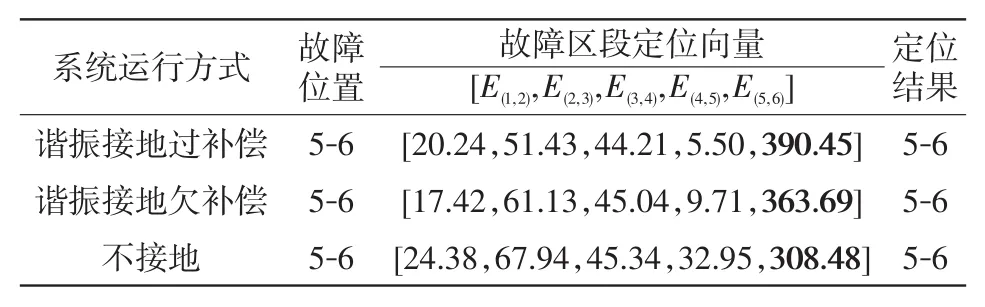
表6 不同运行方式故障区段定位结果(φ=30°,Rg=500 Ω)Tab.6 Fault line section location results in different operation modes(φ =30°,Rg=500 Ω)

表7 不同位置故障区段定位结果(φ =30°,Rg=500 Ω,P=10%)Fig.7 Fault line section location results at different fault positions(φ =30°,Rg=500 Ω,P=10%)
5 结论
本文提出了一种基于暂态零序电流AGM曲线能量的故障区段定位方法,此方法的优势如下:
(1)该方法利用故障点异侧暂态零序电流波形趋势差异显著的特点进行区段定位,定位结果不受故障条件的影响;
(2)该方法仅以能量值作为特征量上传主站,无需向主站上传整段时间内的采样数据,降低了通信要求,减少了对硬件的投资;
(3)该方法构造的判据无需设定阀值,仅根据故障路径上相邻检测点能量差最大原则确定故障区段;
(4)该方法无需增加信号外加注入设备与零序电压互感器,仅利用故障后系统自身的零序电流信息,对系统安全性影响小且节约了故障区段定位成本。