电力信息系统的耦合建模方法
2021-05-11谭阳红赵枫帆
刘 杉,谭阳红,赵枫帆,李 杰
(湖南大学电气与信息工程学院,长沙 410082)
随着电力网中的信息化程度不断加深,传统的单一电力网正逐步演化为电力网和信息网相结合的电力信息系统[1]。要保证电力信息系统的安全稳定运行,电力网和信息网缺一不可,信息网为电力网的稳定运行提供了精确的控制[2-3],同时信息网也要靠电力网驱动[4]。因此,深入研究电力网和信息网间的正常数据交互具有重要意义,进而有必要建立考虑耦合的电力信息系统模型。
已有文献以电力网拓扑为基础,从3种不同方面构造电力信息系统模型[5]。第1种是从系统维护方面出发,针对电力网的防御配置缺乏对信息网特性的考虑,构造考虑攻击和防御的信息交互模型[6]。第2种是从复杂网络理论方面出发,利用信息网部分特性(如信息网与电力网拓扑的相似性以及信息网的无标度特性)建立信息网拓扑[7-8]。仅考虑信息网部分特征,将系统抽象为无向拓扑图[9]或有向拓扑图[10-11]的方法,不足以体现信息网的实际特性[12],这是因为系统中信息网拓扑比电力网拓扑更加复杂,且并不是所有信息网均具有无标度特性。第3种是从系统开发运用方面出发,建立特定系统(如变电站自动化系统SAS或SCADA)或特定设备(如断路器、变压器)的电力信息系统模型[13-14],其只反映信息网的采集和控制两个特性,模糊了信息网采集数据的上传过程和控制指令的下达过程。
本文从实际出发,分析了电力信息系统中的数据闭环流动全过程,将其抽象为有向拓扑图,通过矩阵描述系统内部传输结构。以IEEE9节点系统为例,通过仿真电力网各节点电压稳定调节过程,对比分析主导节点电压变化曲线,验证该模型的适用性和计算的准确性。
1 电力信息系统运行机理
图1所示为系统控制结构示意图,信息网通过传感器采集电力网各物理实体的数据并传送至控制中心,控制中心将采集的数据进行处理后,通过执行器对电力网数据进行调整,反映了电力网和信息网间的闭环数据流动,共同维持着电力网的稳定运行[15-16]。由此可知,建立系统耦合模型的前提需对系统内部的数据流动进行全过程分析[17]。
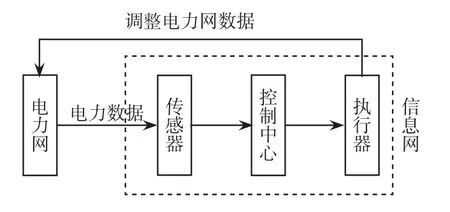
图1 系统控制结构示意Fig.1 Schematic of system control structure
图2所示为IEEE9节点系统结构示意图,图中电力网和信息网之间的耦合关系主要分为电力数据采集和电力数据调整两种信息流动模式。
电力数据传输至控制中心的过程中,主要经历以下步骤:每个传感器对电力网中各元件的参数进行测量并输出相应模拟量;各模拟量经过A/D模块转换为数字量;然后对各元件的数据进行预处理,并将处理过的数据集中在相应的路由器,准备进行数据的发送;主站通信前置机接收各个路由器所发送的数据,并选择部分数据上传至控制中心,其余数据将集中至数据库,以便后续分析应用。
控制中心对电力网数据的调整过程主要分为:控制中心对电力数据进行分析处理产生控制指令(发电机的无功调整量ΔQG);控制指令下发至路由器;路由器将不同控制指令经过A/D转换下发至不同执行器;执行器按照控制指令电气量调节各个发电机出力。
需要指出,电力网的有功和频率等多个参数的控制对系统的稳定运行同样重要,信息网需要采集相应参数数据并对其进行监控,因此,每个电力元件对应多个传感器,分别采集元件的P、Q、Vl、VΦ等多种重要参数。此外,图2采用无功电压控制方式[18]。该控制方式将最能代表电力网电压水平的一个节点电压(即为主导节点)与其参考电压比较后的差值转化为电力网内发电机的无功调控量ΔQG,由此确定信息网中执行器与电力网中的发电机一一对应。
2 电力信息系统耦合模型
根据第1节所述系统数据闭环流动体系,将电力信息系统抽象为有向拓扑图。对于电力网,将变压器、发电机和负荷分别抽象为联络节点、发电节点和负荷节点,将输电线路抽象为边,拓扑方向由潮流决定。对于信息网,将传感器、路由器和主控制中心等抽象为节点,数据传输线路抽象为边,拓扑方向由数据流决定。以图2为例,对其中部分信息节点进行编号。
首先将数据库编号为0;其次按照电力网结构顺序,将电力节点编号为1~9;最后对信息节点进行编号。典型的电力节点在信息网中的电力数据上传过程如图3所示,建立9×11的矩阵H。矩阵H的行代表电力节点,列代表信息节点的编号顺序。以矩阵H的第1行为例,分析说明矩阵H中元素的物理意义,即

式中:H1代表图3中的传感器,包括H1,1、H1,2、H1,3、H1,4;H2代表图3中的A D转换模块,包括H1,5、H1,6、H1,7、H1,8;H3代表图3中的路由器,包括H1,9、H1,10;H4代表图3中的主站通信前置机,包括H1,11。
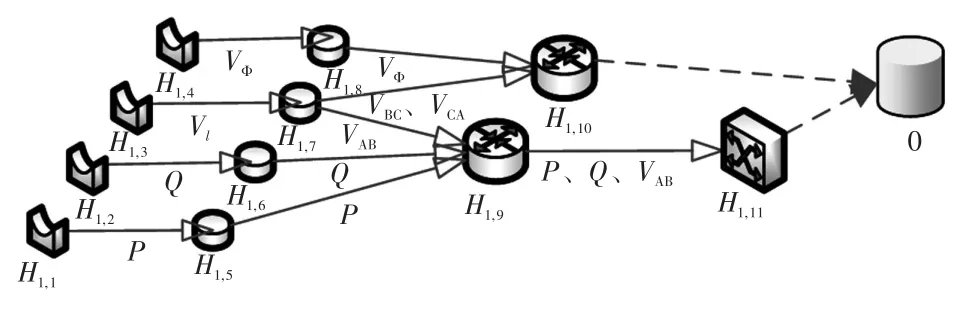
图3 Bus1的信息节点Fig.3 Cyber nodes of Bus1
控制中心对电力网的电力数据调整过程如图4所示,建立1×10的矩阵HP如式(2)所示,行代表电力网的控制区域编号,列代表信息节点的编号顺序。

式中:HP1代表图4中的电压设定值,包括HP1,1;HP2代表图4中的A/D转换模块,包括HP1,2、HP1,5、HP1,7、HP1,9;HP3代表图4中的控制中心,包括HP1,3;HP4代表图4中的路由器,包括HP1,4;HP5代表图4中的执行器,包括HP1,6、HP1,8、HP1,10。
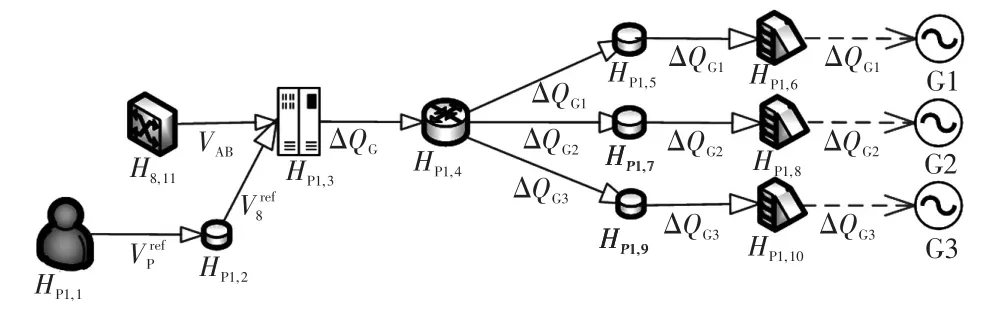
图4 Bus8的部分信息节点Fig.4 Part of cyber nodes of Bus 8
通过上述分析可知,矩阵H为电力节点1~9的数据上传至控制中心对应的信息节点,依次编号为10~20,21~31,32~42,43~53,54~64,65~75,76~86,87~97,98~108。矩阵HP为控制中心下发指令所对应的信息节点编号为109~118。
信息网内部元件的耦合关系用矩阵C表示,假设信息网包含n个信息节点,其中矩阵C(n×n阶)的任一元素cij表示节点i和节点j的联系。若i=j,则表示信息节点,此时cij为节点储存的数据;若i≠j,则表示节点i和节点j间的信息支路。当节点i指向节点j时,cij为1;其余情况时,cij为0。以图4中信息节点HP1,4、HP1,5、HP1,7、HP1,9为例,建立4×4的矩阵C1为
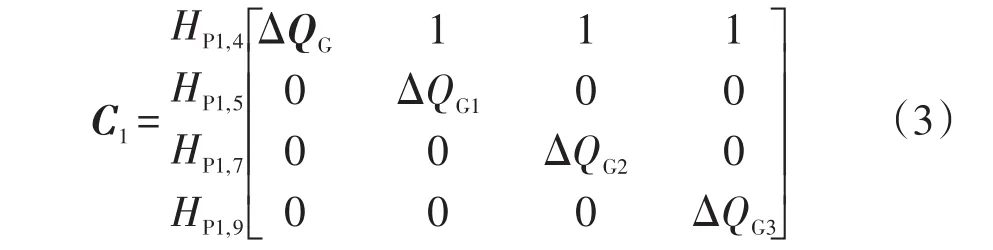
式中:c1,1代表信息节点HP1,4储存的数据ΔQG;c1,2代表由信息节点HP1,4指向信息节点HP1,5;c2,2代表信息节点HP1,5储存的数据ΔQG1;以此类推。
电力网内部元件的耦合关系用矩阵P表示,假设电力网包含m个电力节点,矩阵P(m×m阶)的任一元素pij表示节点i和节点j的联系。若i=j,则表示此时pij为节点储存的多变量数据参数X(X=[P Q VlVΦ]);若i≠j,则表示节点i和节点j间的支路。节点i与节点j有直接连接时,pij为1;其余情况时,pij为0。
电力网和信息网间的耦合关系分为电力数据上传和控制指令下达,分别用矩阵Wup(n×m阶)和矩阵Wdown(m×n阶)表示,矩阵中任一元素wupij和wdownij表示节点i和节点j的联系,当节点i指向节点j时,wupij和wdownij为1;其余情况时,wupij和wdownij为0。
以IEEE9节点系统中发电机G1为例,建立矩阵Wup(1)和矩阵Wdown(1)分别为

式中:wup(1)1,1、wup(1)1,2、wup(1)1,3、wup(1)1,4代表发电机G1指向传感器节点H1,1、H1,2、H1,3、H1,4,其余元素均为0;wdown(1)114,1代表执行器HP1,6(编号为114)指向发电机G1,其余元素均为0。
系统包含(n+m)个节点,耦合关系用矩阵W表示,W((n+m)×(n+m)阶)的结构定义如下:

系统中电力数据的上传路径为P→Wup→C,控制指令的下达路径为C→Wdown→P,由此构成电力网和信息网间数据的正常交互,保障电力网稳定运行。
3 模型的仿真及分析
图5所示为PowerFactory中的IEEE9节点系统,其电力网支路的电气参数参考文献[19]。选取图5中Bus8为无功电压控制的主导节点,G1、G2和G3为控制发电机。采用方案1和方案2进行模型仿真对比研究。方案1:对图5所示系统不采取任何控制方式;方案2:对图5所示系统采用本文的耦合控制方式。

图5 IEEE9节点系统Fig.5 IEEE 9-bus system
表1为采用方案1时,在负荷无功参数QD5、QD6、QD8改变后,当前时刻下电力网中Bus8的电压值V8以及发电机的出力值QG1、QG2、QG3。表1中t为时刻,各无功单位为Mvar。

表1 方案1下系统参数改变量Tab.1 Changes in system parameters under Scheme 1
根据表1中数据可知,随着负荷增加,V8逐渐下降,要使电压维持在(1.0±0.1)p.u.左右,则需调节电力网中发电机出力,即


设Bus8产生的电压偏差为ΔV8,根据式(7)可得

式中:QG(t)为当前时刻电力网发电机发出的无功功率;V8(t)、ΔV8(t)分别为当前时刻Bus8的实际电压和电压偏差;QG(t+0.1)为下一时刻电力网内发电机发出的无功功率。


表2 方案2下系统参数改变量Tab.1 Changes in system parameters under Scheme 2
主导节点8的电压变化如图6所示。

图6 主导节点8的电压变化曲线Fig.6 Voltage changing curve of pilot Bus 8
图6中,02:00时,V8(2)=0.98p.u.,下一时刻发电机无功调整量为 ΔQG(2)=[5.5;-17.7;6.2];07:00时,V8(7)=0.98p.u.,下一时刻发电机无功调整量为ΔQG(7)=[-1.5;10;13.6];09:00时,V8(9)=0.98p.u.,下一时刻发电机无功调整量为ΔQG(9)=[21.6;5.9;1.7]。即当系统负荷发生改变时,方案2通过改变发电机无功调整量可将节点电压始终维持在(1.0±0.1)p.u.左右,而方案1中节点电压逐渐下降失稳,由此可以看出本文设计的模型有助于进行电力网的电压稳定计算,仿真曲线进一步说明该模型计算误差小,能准确计算控制量。
4 结语
本文从电力信息系统的运行机理出发,建立考虑电力网和信息网耦合作用的电力信息系统模型,该模型克服以往复杂网络建模内部传输结构模糊的不足,清晰明确地显示系统内部的数据流动过程,并通过电力网节点电压稳定调节仿真实验验证所提模型在工程适用性和计算准确性上的优点,实验结果表明此模型能够准确下达控制指令,维持电力网节点电压的稳定,进而保障系统稳定运行。
