一种基于时空相关分析的货运列车车号识别方法研究
2021-05-11王保宪王凯杨宇飞李义强赵维刚
王保宪,王凯,杨宇飞,李义强,赵维刚
一种基于时空相关分析的货运列车车号识别方法研究
王保宪1, 3,王凯2,杨宇飞2,李义强1, 3,赵维刚1, 3
(1. 石家庄铁道大学 大型结构健康诊断与控制研究所,河北 石家庄 050043;2. 石家庄铁道大学 电气与电子工程学院,河北 石家庄 050043;3. 河北省大型结构健康诊断与控制重点实验室,河北 石家庄 050043)
提出一种基于时空相关分析的货运列车车号识别方法,该方法包括车号定位、片段聚类与车号识别3部分。基于连通体分析技术,提出利用货运列车车号字符间特定的几何比例关系有效地定位车号区域;在车号定位基础上,利用视频序列时空冗余信息建立帧信息补正模型,对部分定位错误帧图像进行补正并通过片段聚类方法将包含相同内容的车号视频序列进行切分;利用概率神经网络训练车号联合识别决策器,对可能包含同一车号的多帧图像进行联合识别,有效提高车号识别的准确率。通过在实际货运列车视频数据集上进行测试验证,本文算法对所有帧图像的平均车号识别准确率高于90%,优于传统基于静态图像处理的车号识别方法。
货运列车;车号定位;车号识别;时空相关性;概率神经网络
货运列车车号识别是铁路系统自动化建设中的一种新型管理方式。目前,基于数字图像处理的车号识别技术以低成本、高效率、高精度的优势,受到国内外研究人员的广泛关注。车号区域定位是车号识别系统的首要步骤。邢益良等[1]使用投影法获取特征明显的图像分割区域以定位车号范围;杨绍华等[2]定位灰度大于平均投影灰度的区域作为车号区域。以上2种方法均利用投影法完成车号区域定位,投影定位算法简单且具有较高的运算效率。但考虑到实际拍摄的图像中存在背景杂波,应用投影法仅可以粗略地定位车号范围,无法实现对单个车号区域的精准定位。为了精准定位单个车号区域,赵入宾[3]利用车号字符笔画边缘信息对车号进行定位。王浩宇[4]提出一种改进笔画宽度变换算法以快速确定车号位置。魏玮等[5]利用数字具有的凹特征、中线、圆形度等矩特征定位车号。以上车号定位方法利用车号字符纹理变化,定位效果良好。但考虑到车厢表面其他区域也可能包含数字或字母,其具有和车号相同的纹理特征,可能导致一些虚假车号区域被定位。此外对于货运列车而言,其车厢喷印的车型码和车厢号之间满足特定的几何比例关系,这是与普通汽车车号最大的不同之处。然而既有研究均忽略了这一特点,导致其在铁路复杂背景下的车号定位效果一般。完成单车号定位后,需要识别每个车号图像内容。杨吉[6]利用卷积神经网络训练分类模型完成单个字符识别。廖健[7]利用深度卷积神经网络识别定位结果。上述车号识别方法在静态图像拍摄条件下取得了良好结果。然而对于货运列车,其车号识别过程一般是在列车运行场景下完成的。由于货运列车运动会导致采集的图像出现运动模糊,这使得传统基于单帧静态图像处理的车号识别方法效果一般。即使部分采集图像不存在模糊,由于既有方法未充分利用货运列车视频序列的时空冗余信息,限制了货运列车车号识别精度的进一步提高。基于上述问题分析,本文提出一种基于时空相关分析的货运列车车号识别方法,如图1所示,包括车号定位、片段聚类、识别决策3部分,该方法具有以下创新点:1) 针对复杂背景,利用背景杂波所不具有的货运列车车型码内部字符间的几何比例关系,实现了复杂场景下车型码的精准定位,并基于确定的车型码参数,进一步定位该帧图像的车厢号。2) 针对货运列车运动导致的车号定位精度降低问题,利用货运列车视频序列的时空冗余信息建立时空帧信息补正模型,通过相邻帧图像信息的相互融合,避免了车号区域定位错误产生的影响。3) 建立多帧图像联合识别决策器,对可能包含相同车号的一系列图像同时识别,输出可能性最高的车号识别结果。由于连续多帧图像联合识别,提高了车号识别精度。
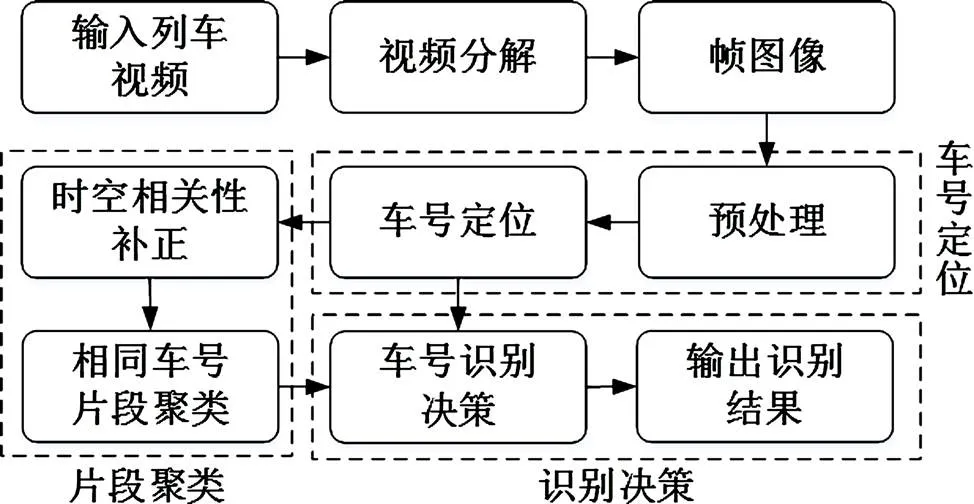
图1 系统流程图
1 算法概述
在图1中,首先将输入的货运列车视频分解成帧序列,对每一帧图像进行预处理后通过车号定位模块完成车号区域定位;接着,利用相邻帧的定位结果对定位错误的帧进行补正,并把定位结果相似的图像进行聚类;最后建立联合识别决策器,识别可能包含同一车号的多帧图像并将识别概率最大的结果作为这些图像共同的识别结果输出,从而完成车号识别功能。
2 车号定位
本文利用连通体分析法对车号进行定位,首先对货运列车图像进行包含灰度转换、二值化与形态学运算的预处理,然后利用车号内部字符的几何特征关系对车号进行筛选以完成定位。
2.1 图像预处理
在对采集到的图像进行车号定位之前,先对图像进行预处理:首先使用加权平均法对采集图像进行灰度转换,将原图像在,和通道上对应的3个矩阵合并转化为1个矩阵,减少后期的运算量。之后,利用Niblack自适应图像分割法[8−9]对灰度图像进行二值化处理,初步实现车号字符的分割;最后,搜索图中所有的连通体,并设置一个合适的尺寸因子对所有连通体进行形态学开运算,消除面积很小的杂波连通体。图2展示了货运列车车厢原图与各部分预处理的效果图。

(a) 原图;(b) 灰度转换;(c) 二值化;(d) 形态学运算
由图2(d)可知,进行预处理后的货运列车图像依旧存在许多背景杂波,因此需要进一步提取单个车型码,便于后续单个车号字符的识别。
2.2 车型码定位
考虑到车厢喷印的数字和字母的高宽比例在一定范围内,因此可设置一个高宽比例去除图像中的部分杂波连通体。在此基础上,经过相关调研,可知货运列车的车型码满足如下特定的几何规律:
1) 车型码首字符的高度约为之后字符高度的2倍;
2) 车型码所有字符水平排列,且底端大致 对齐。
图3展示了经预处理后车型码的连通体,图4为车型码连通体示意图。
图3 车型码连通体图

图4 车型码连通体示意图
在图4中,标号1和2分别为连通体C与C,3和4为C和C的质心坐标(x,y)与(x,y),5为C左侧一定范围内的区域。设每个连通体的最小外接矩形的高度依次为h(=1,2,3,…,num),从=1开始,在连通体C质心左侧标记区域范围内,搜索能够与其组成最近邻对的连通体C,步骤如下。
Step 1:判断两连通体的尺寸关系:
式中min与max为根据车型码首字符约为其余字符高度的2倍这一特征而预先设置的比例系数。
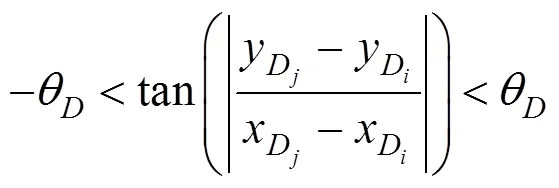
Step 2:判断2连通体质心连线与水平线夹角是否在预先给定的范围内:

Step 3:限制被搜索的连通体在C的左侧:

通过上述3个步骤对图中所有连通体进行搜索,寻找所有符合条件的连通体构成连通体对。在初步定位后,进一步在该连通体对的右侧一定范围内搜索高度在[0.9,1.1]范围内的连通体,并与已知的连通体对组成车型码字符链,实现对货运列车车型码区域位置的定位。
2.3 车厢号定位
经调研,车厢号存在如下几何先验知识:
1) 车厢号所有字符高度与车型码首字符高度相近;
2) 车厢号固定为7位,7位字符之间可能存在宽度为1~3个字符宽度的空档;
3) 车厢号所有字符水平排列,且底端大致 对齐。
图5展示了货运列车车号字符的连通体,图6为车厢号连通体示意图,其中标号1~4为4个车厢号连通体,标号5为连通体3和4的质心连线与水平线的夹角,为前文提取到车型码首字符的高度,由于其高度与车厢号相近,图中车厢号的字符高度以及字符间距均以该参数进行表示。
图5 车号连通体图
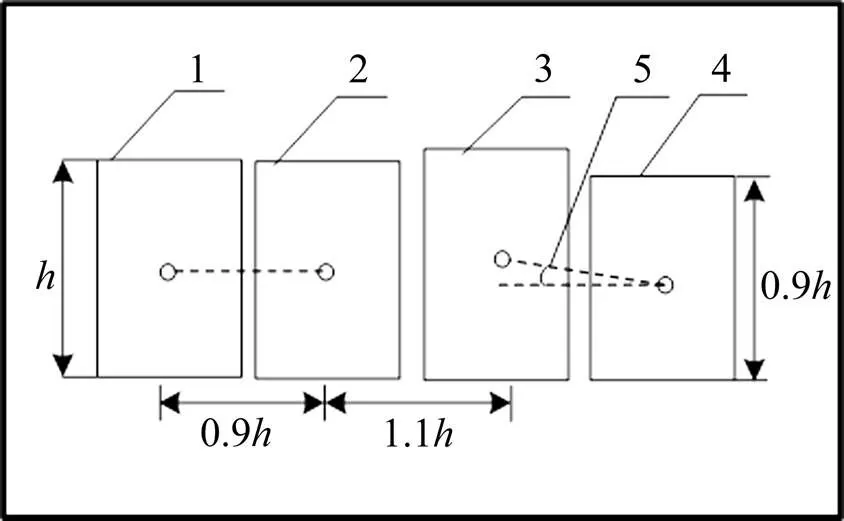
图6 车厢号连通体示意图
Step 1:判断两连通体的尺寸关系:


Step 3:限制两连通体空间位置关系,要求:

式中:为预先给定的比例系数,它约束了2连通体可构成连通体对时距离的上限。
Step 4:设完成连通体配对后的所有连通体对集合为={1,2,3,…,X},检查X中最后一个连通体与X中首个连通体是否相同,相同则进行合并,判定连通体链中包含3个以上字符时为车厢号部分,进一步在该连通体链左右两侧3的范围内寻找其它连通体对,合并为新的连通体链,直到其包含7个字符,则车号定位完成。
3 补正与聚类
本文基于货运列车视频中的冗余信息建立时空帧信息补正模型,利用车号定位结果的时空相关性对出现车号定位错误的图像进行补正。同时,本文进一步计算各车号定位图像之间的差异像素数,以此作为类间距离对车号图像进行层次凝聚聚类管理,实现视频序列的片段切分。
3.1 基于时空相关性的帧信息补正
本文利用视频序列存在的时空相关性对车号定位错误图像进行补正,如图7所示,其原理是在确定定位错误帧位于视频序列中的位置后,利用其相邻2帧图像的正确定位结果对错误定位结果进行替换。
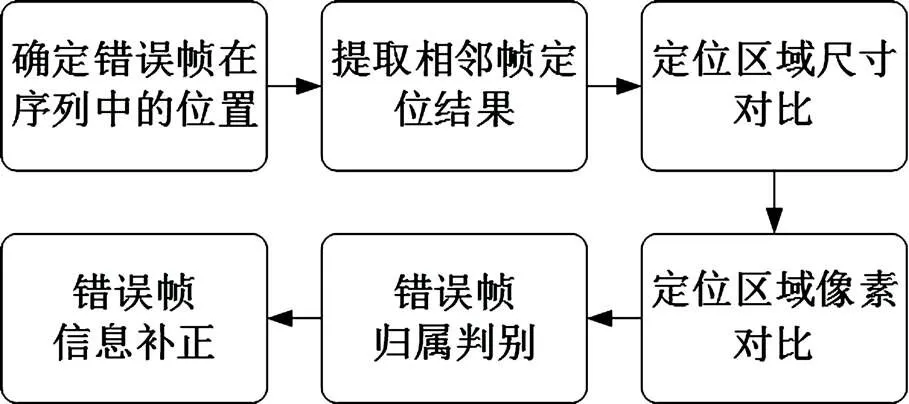
图7 帧信息补正流程图
在判断错误帧与哪一相邻帧包含相同车号的过程中,本文对比相邻帧的车号定位区域的尺寸与像素灰度,判定相邻两帧是否包含相同车号,然后根据不同判定结果进行对应的归属判别。
3.1.1 定位区域尺寸对比
设错误帧位于视频序列中的第帧,本文提取第−1和+1帧图像的定位结果矩阵1,2,通过比较1和2的尺寸来判断2帧图像的定位结果是否相同,步骤如下。
Step 1:计算的归一化矩阵宽度与高度的几何比例:
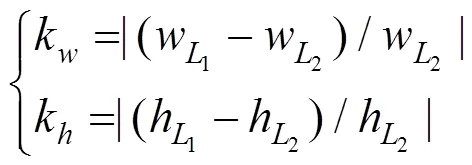
Step 2:将k与k分别和预先给定的阈值进行比较,其结果分为以下2种情况:
1) 当k与k其中任何一个大于给定阈值时,认定1和22个矩阵的尺寸有较大差异,进而判定两者包含不同车号;
2) 否则,认定1和22个矩阵的尺寸相近,该情况需要进一步计算两矩阵的差异像素数来判定所包含车号是否相同。
3.1.2 定位区域像素对比
当1和22矩阵尺寸相近时,利用扫描技术计算两矩阵像素差异从而判定两矩阵所包含车号是否相同,具体步骤如下。
Step 1:将2放入一个更大的矩阵3中,矩阵的行数与列数由下式给出:
Step 2:使用1在3中进行扫描,统计1在每一位置与3的差异像素数量={1,2,3,…,N},提取其最小值min。
Step 3:将min与预先设置的阈值进行比较:当min小于阈值时,判定1和2包含相同车号;否则,判定1和2包含不同车号。
3.1.3 帧信息补正
利用前2节方法可以得到相邻2帧所包含车号相同或不同2种情况,针对这2种情况使用不同方案对错误帧图像进行补正:
1) 当1和2包含相同车号时,则判定错误帧与相邻2帧图像都包含相同的车号内容,即1和2均可用来对错误结果进行替换。
2) 当1和2包含不同车号时,再次利用扫描技术进行归属判定,具体步骤如下。
Step 1:使用1和2分别在错误帧进行扫描,统计2矩阵在每一位置的差异像素数={1,2,3,…,A}和={1,2,3,…,B}。
Step 2:对比集合与中的最小值min与min,认定较小的一方包含与错误帧相同的车号,将其对应的1或2定位结果对错误帧的定位结果进行替换,完成帧信息的补正。
3.2 车号图像片段聚类
为考察哪些图像包含相同车号,需要对图像进行聚类[10−11]。由于无法预先得知车号的个数,且图像在序列中存在顺序,使用一种改进的层次凝聚聚类法对视频序列进行片段切分,具体过程如下。
Step 1:将视频序列中的每一帧图像看作一类,根据图像在视频序列中的位置对所有类进行排序。
Step 2:设置距离阈值,计算相邻类之间的类间距离,然后把距离最近且距离小于的2个类合并成一个新的类。
Step 3:重复步骤2,进行反复迭代直到类数目的收敛不再增加,完成聚类。
由于是对图像相似度的考察,本文以差异像素数作为类间距离,差异像素数的计算方法与前文中判定两矩阵是否包含相同内容的方法一致;同时,设定每个类中的首个图像为类的中心。经过上述货运列车视频序列的片段聚类过程,可能包含同一车号的多帧图像都被聚类,使货运列车视频序列有了整体的片段切分。
4 联合识别决策器
本文建立联合识别决策器,首先利用概率神经网络[12−13]对所有图像进行车号识别,然后统计经聚类后各片段内的识别结果,选取识别概率最大的结果,作为该片段的最终结果输出。在对车号进行识别决策之前,先对货运列车车号字符进行考察,经调研,可知货运列车车号字符具有以下特点:
1) 车型码首字符必定为字母,其他字符可能为字母或数字。
2) 车厢号所有字符均为数字。
针对上述车号字符特点,为降低算法运算量并提高识别准确率,本文设计了3种包含不同训练样本的识别模块,分别对输入样本为数字、字母、数字及字母3种情况进行识别。图8为本文所使用概率神经网络的结构图。
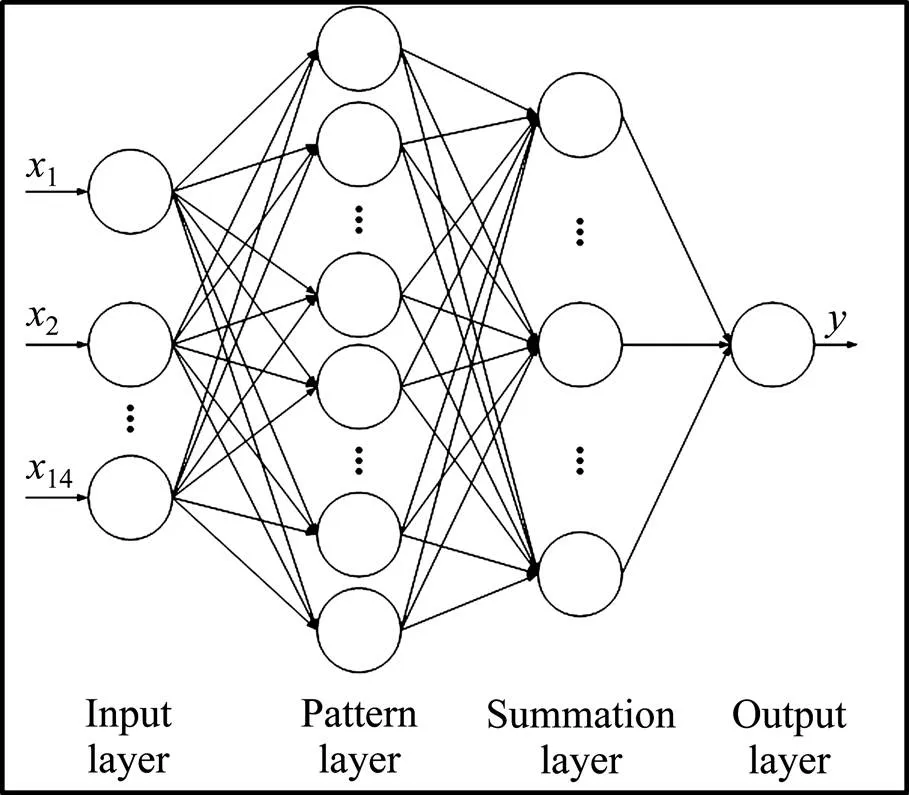
图8 概率神经网络结构图
系统整体的联合识别决策步骤如下。
Step 1:提取视频序列中的一个片段,将每帧图像包含的字符进行分割,并对每个字符进行尺寸规范化处理,之后按照车型码首字母、车型码其它字符、车厢号分为3组。
Step 2:对所有字符进行特征提取,包括8个结构特征与6个统计特征,其中8个结构特征为:竖直1/4,1/2和3/4处像素数总和,水平1/3,1/2和2/3处像素数总和,两对角线像素数总和;6个统计特征为:图像左上、右上、左下、右下4个区域的像素数总和与图像水平、竖直方向上中心1/3区域的像素数总和。
Step 3:3组分别通过训练样本为字母、字母与数字、数字的识别模块进行识别,其中,每个识别模块中概率神经网络的输入层节点数与输入特征向量维数相同,模式层节点数与训练样本数量相同,第类训练样本的第个模式层节点输出由下式给出:
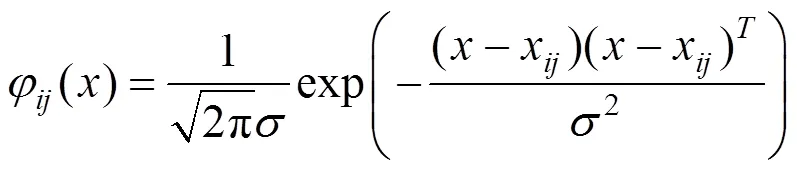
式中:为某一输入向量;x为第类输入样本的第个样本的特征向量;为模型的超参数,需要提前设定。计算输入图像与每一类训练样本之间的距离后,在求和层对同类测试样本对应的模式层节点输出进行求和:
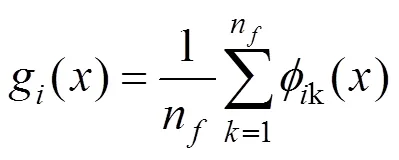
式中:n为某一类训练样本中包含的样本数量。之后,在输出层选取求和层中输出概率最大的一类为该张字符图像的输出结果。
Step 4:所有图像经过神经网络后均得到一个识别结果,统计同一片段内可能包含相同字符的图像的识别结果,包括识别结果的种类数及每种出现的次数,计算各种类出现的概率,并选取出现概率最大的识别结果作为该字符片段的最终识别结果输出,其中最大出现概率为:
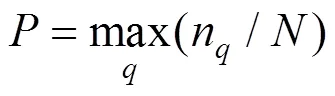
式中:=1,2,3,…,,为得到识别结果的种类数;n为第种识别结果的出现次数;为输入测试样本的数目。
Step 5:将每个字符的识别决策结果进行合并,完成该片段的字符识别。
Step 6:重复Step1~5,直到所有车号图像片段完成识别决策。
5 算法验证
为验证本文所提车号识别方法的有效性,利用帧率为130FPS的凯视佳相机MU3HS230M/C放置在铁路轨道一侧进行列车视频采集,该相机的实际采集帧率达到50FPS,被采集到的列车速度约为70 km/h,随机抽取其中一段连续图像作为测试数据,共计2 000帧,每帧图像的分辨率为1 920×1 080。另外,在所有视频数据中人工选择识别模块的训练样本,数量为每种字符30个,其中英文字母包括:A,B,C,E,H,K,N,P,T和X共10种,英文字母样本库共300个样本;数字包括0~9共10种,数字样本库共300个样本。所有训练样本经灰度化、二值化与去噪后,规范化为64×64大小并送入概率神经网络进行训练。
为评估算法性能,本文方法的车号定位部分将与2种具有代表性的方法进行对比,它们分别是投影法与纹理分析法。同时,本文进一步对比了传统静态的车号字符识别方法与本文所提联合识别决策方案的识别准确率。上述方法均在Matlab平台实现,并使用同一组实验数据。
5.1 车号定位性能分析
为保证系统的鲁棒性,所采集样本中包含了光照、车号以外的字符区域等杂波干扰,图9为某一包含了各种干扰的数据图像。

(a) 光照干扰;(b) 示例图像;(c) 车厢上其他字符干扰
可以明显看到,光照区域和其他字符区域均会对车号定位产生影响,而车型码字符间特定的几何比例关系是背景杂波所不具有的,利用这一特点可以较好地提取车型码,之后利用车型码首字母与车厢号具有相近的尺寸这一特点在原图中重新筛选车厢号即可完成定位,定位效果如图10所示。
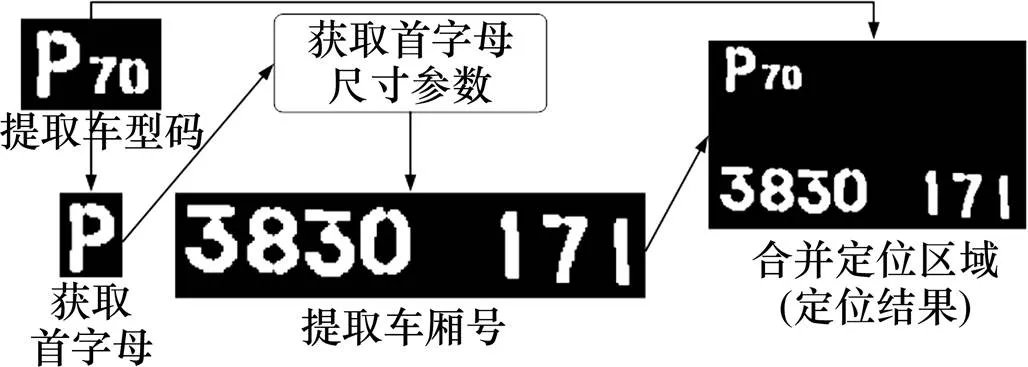
图10 车号定位效果图
5.2 补正与聚类性能分析
图11展示了2种具有代表性的车号定位错误情况及其对应的补正流程,2种情况分别为:
1) 如图11(a)所示,由运动模糊导致所有字符的几何比例不满足车号定位时的筛选条件,该帧图像的车号没有被定位。
2) 如图11(b)所示,由部分车号超出相机捕捉范围导致定位车号位数不足。
同时,为验证系统性能,设置1)和2)中相邻帧分别包含相同/不同结果。
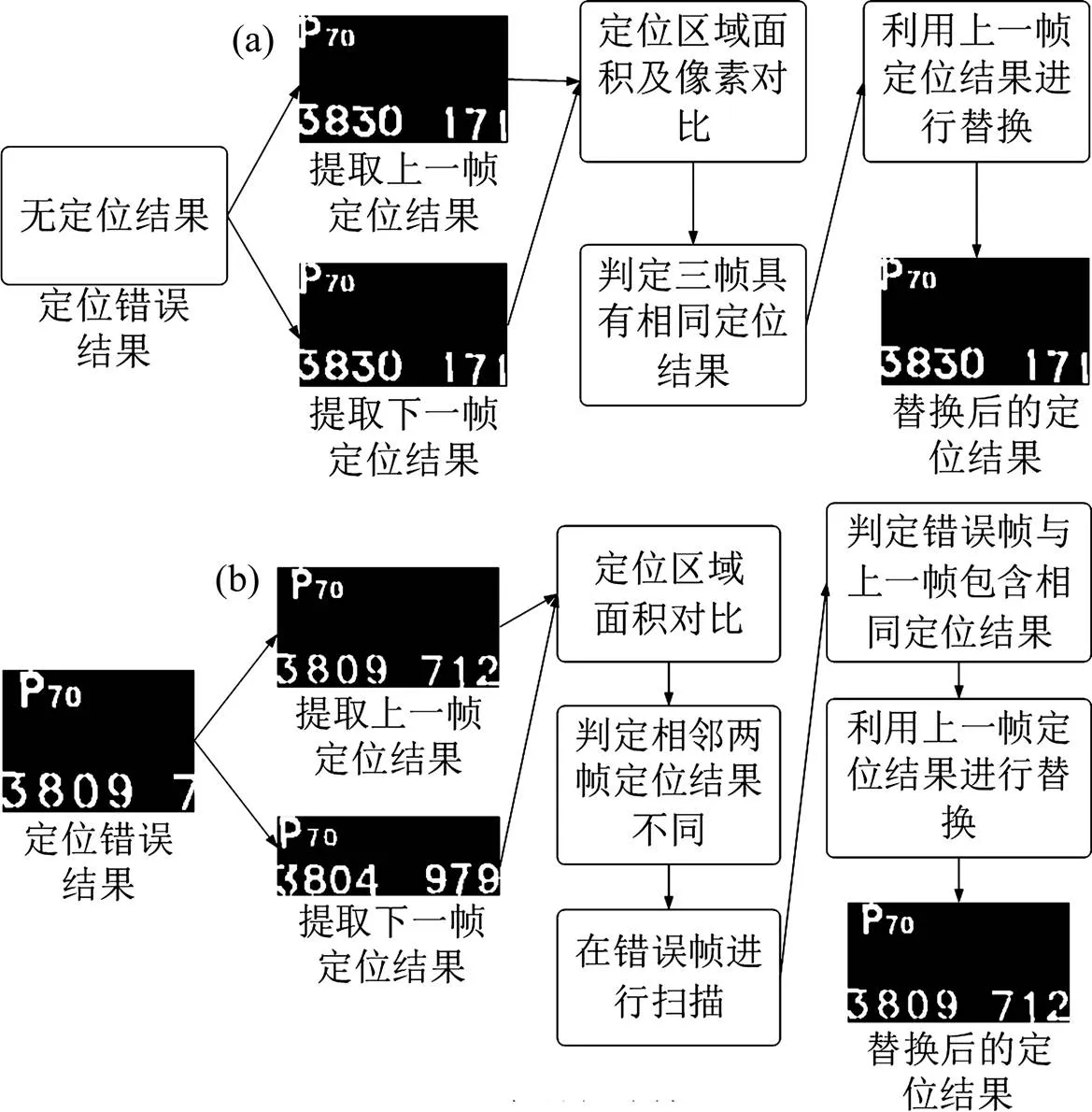
(a) 运动模糊图像的补正流程;(b) 车号部分缺失图像的补正流程
可以看到,无论相邻帧图像包含车号是否相同,本算法均可准确地完成错误帧的归类与补正。之后,在图像聚类过程中,图12给出了部分类间距离的统计折线图,共计100组,其横轴数值代表进行类间距离计算的组次,纵轴数值代表组内2类的类间距离。
图12中,类间距离在8个位置出现了激增,说明对应8个组内的图像包含不同内容,二者不会被聚类,从而达到片段切分效果;同时,可以看到部分组的类间距离为0,这是由于部分车号定位错误图像经过了上述时空相关性补正过程,使错误定位结果被相邻帧替换,因此二者包含完全相同的定位结果,即不存在类间距离。就结果来说,本算法将类间距离较小的一系列图像成功聚类,成功实现视频序列的片段切分。
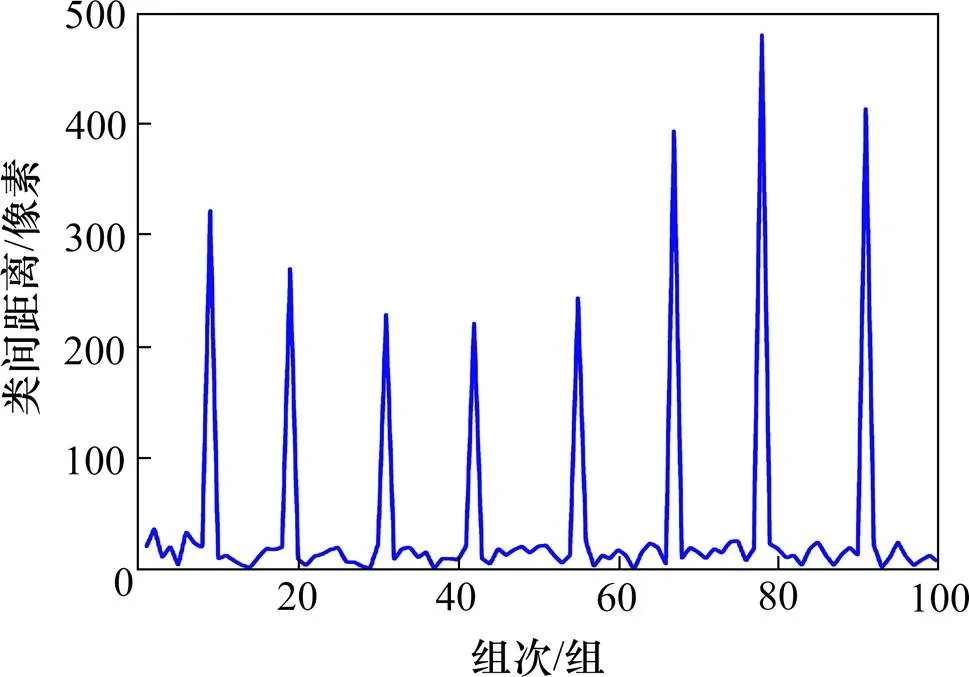
图12 部分类间距离统计折线图
5.3 识别决策性能分析
图13展示了经聚类后一个片段中车型码的识别决策结果,该片段共包含12帧图像,车型码共3位,图13(b)3个表格为3种字符的各自12个识别结果的统计,表格第1列为输入图像序号,第2列为识别结果,结果中的0~9对应数字0~9,25对应英文字母“P”。
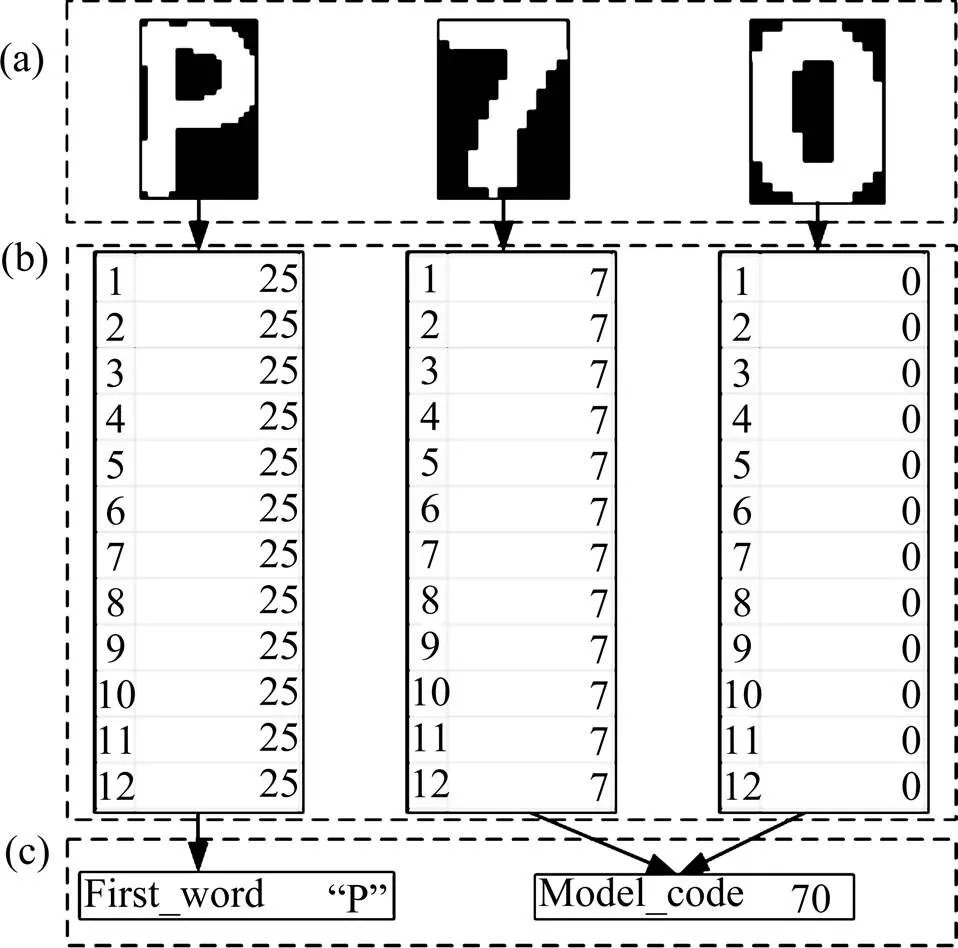
(a) 输入字符;(b) 识别决策;(c) 决策结果
为验证模型性能,特加入噪声使数字“0”的第5帧被错误识别成“8”,从整体的统计结果来看,识别概率最大的依旧是数字“0”,而少数识别误差会被忽略。就结果而言,该模型实现了车号的精准识别,并消除了部分误差带来的影响。
5.4 模型性能验证
在不改变实验环境的前提下,本文利用3种不同方法对2 000张样本图像进行车号定位,表1展示了3种方法的准确率与运算时间。

表1 3种定位方法准确率及时间对比
由表1的对比数据可知,本文所提算法具有较高准确率,而算法基于连通体分析技术,不需要复杂计算,有较高效率。同时,实验数据中有42张图像出现车号超出相机捕捉范围、14张出现动态模糊的情况,在进行帧信息补正后,所有错误图像都被替换,且定位准确率提高至93.22%。
之后,如表2所示,本文计算了传统静态的车号字符识别方法与本文所提联合识别决策法的准确率与运算时间,2种方案均基于相同的概率神经网络。

表2 2种识别方案的准确率及时间对比
观察表2可发现,由于决策本身是对识别结果进行统计并选出概率最大结果,不会过多增加运算时间,而对多个输入图像进行协同分析,对识别准确率有显著的提高作用。
6 结论
1) 所提车号定位方法利用货运列车车号内部字符之间的几何比例关系,较好地抵抗了复杂背景下光照、车厢其他字符等杂波的干扰,具有较高准确率。
2) 利用相邻图像的车号定位结果对定位出错的图像进行补正,可进一步提高定位准确率。
3) 使用层次凝聚聚类法对视频序列进行片段切分,将可能包含同一车号定位结果的片段进行联合识别决策,得到了较传统识别方法更高的识 别率。
4) 通过在实际采集的2 000张货运列车图像数据集上进行测试验证,本文的定位准确率达到93.22%,最终的识别准确率达到90.16%,具有良好的车号识别性能,验证了本文方法的有效性。
[1] 邢益良, 马亮, 韩宝如, 等. 积分投影和统计法在车号定位中的应用[J].计算机与数字工程, 2013, 41(8):1333−1335.XING Yiliang, MA Liang, HAN Baoru, et al. Integral projection and statistical method’ application in train number positioning[J]. Computer & Digital Engineering, 2013, 41(8): 1333−1335.
[2] 杨绍华, 李建勇, 王恒. 基于BP神经网络的货车车号识别方法研究[J]. 铁路计算机应用, 2007, 16(12): 4−7. YANG Shaohua, LI Jianyong, WANG Heng. Research on method of vehicle number recognition based on BP neural network[J]. Railway Computer Application, 2007, 16(12): 4−7.
[3] 赵入宾. 铁路货车车号识别的算法研究[D]. 天津: 河北工业大学, 2010. ZHAO Rubin. Research on railway freight car licence recognition algorithm[D]. Tianjin: Hebei University of Technology, 2010.
[4] 王浩宇. 列车车号定位与识别算法研究[D]. 西安: 长安大学, 2018. WANG Haoyu. Research on train number detection and recognition algorithm[D]. Xi’an: Chang’an University, 2018.
[5] 魏玮, 赵入宾. 矩特征在铁路货车车号识别中的应用[J]. 微计算机应用, 2010, 31(11): 34−38. WEI Wei, ZHAO Rubin. Application of moment for train license recognition[J]. Microcomputer Applications, 2010, 31(11): 34−38.
[6] 杨吉. 基于图像处理的高速列车车号识别算法研究[D]. 成都: 西南交通大学, 2017. YANG Ji. The research on high speed train number recognition algorithm based on image processing[D]. Chengdu: Southwest Jiaotong University, 2017.
[7] 廖健. 基于图像的铁路货车车号自动识别研究[D]. 成都: 西南交通大学, 2016. LIAO Jian. Automatic recognition of railway wagon numbers based on images[D]. Chengdu: Southwest Jiaotong University, 2016.
[8] Niblack, Wayne. An introduction to digital image processing[C]// Advances in Computer Graphics Vi, Images: Synthesis, Analysis, and Interaction. Springer- Verlag, 1986.
[9] LI L Y, ZHANG X W, LI W T, et al. Visual inspection method of ceramic bottle surface defects based on niblack optimization[C]// Advanced Science and Industry Research Center. Proceedings of 2017 2nd International Conference on Computer, Mechatronics and Electronic Engineering (CMEE 2017). Advanced Science and Industry Research Center: Science and Engineering Research Center, 2017: 374−378.
[10] YANG Y, WANG H. Multi-view clustering: A survey[J]. Big Data Mining and Analytics, 2018, 1(2): 83−107.
[11] 鞠成恩. 基于图像底层特征的图像聚类与检索研究[D]. 昆明: 昆明理工大学, 2018. JU Cheng’en. Research on image clustering and retrieval based on image bottom features[D]. Kunming: Kunming University of Science and Technology, 2018.
[12] Fikriye Öztürk, Figen Özen. A new license plate recognition system based on probabilistic neural networks[J]. Procedia Technology, 2012, 1: 124−128.
[13] 刘朝阳, 陈以, 李少博. 概率神经网络在手写汉字识别中的应用[J]. 电子设计工程, 2016, 24(2): 32−34. LIU Chaoyang, CHEN Yi, LI Shaobo. Application of probabilistic neural network in Chinese handwritten character recognition[J]. Electronic Design Engineering, 2016, 24(2): 32−34.
Research on identification method of freight train number based on spatio-temporal correlation analysis
WANG Baoxian1, 3, WANG Kai2, YANG Yufei2, LI Yiqiang1, 3, ZHAO Weigang1, 3
(1. Structure Health Monitoring and Control Institute, Shijiazhuang Tiedao University, Shijiazhuang 050043, China;2. School of Electrical and Electronic Engineering, Shijiazhuang Tiedao University, Shijiazhuang 050043, China;3. Key Laboratory for Health Monitoring and Control of Large Structures of Hebei Province, Shijiazhuang 050043, China)
In this paper, an effective and efficient freight train number identification model was processed based upon the spatiotemporal correlation analysis, which consists of three parts: train number location, fragment frame clustering and train number identification. Firstly, via the connected component analysis, the specific geometric proportion relation between these numbers characters of freight train was used to locate the train number area effectively. Secondly, on the basis of train number area location, one frame information complement framework was established by using the temporal and spatial redundancy information of video. Within this framework, the frame containing the error location result can be corrected, and the train sequences that contain the same contents were clustered by fragment clustering method. Thirdly, the probabilistic neural network was utilized for train number recognition, which jointly identifies multiple image frames which may contain the same train number, thereby improving the accuracy of train number recognition. Simulation results on the practical train video dataset demonstrate that the average recognition accuracy of our presented model is higher than 90%, which is better than the traditional static freight train number identification methods.
freight train; train number location; train number identification; spatiotemporal correlation; probabilistic neural network
10.19713/j.cnki.43−1423/u.T20200574
TP391.41
A
1672 − 7029(2021)04 − 0999 − 10
2020−06−23
河北省重点研发计划项目(19210804D);国家自然科学基金资助项目(51808358);河北省高等学校科学技术研究项目(BJ2020057);国家能源投资集团有限责任公司科技创新项目(SHGF-15-41);石家庄铁道大学研究生创新资助项目(YC2020067);石家庄铁道大学优秀青年科学基金资助项目
王保宪(1987−),男,河北清河人,副教授,博士,从事数字图像处理、智能感知技术与数据科学工程等方面研究;E−mail:wbx1025@163.com

(编辑 阳丽霞)
