基于SOGI的MMC环流抑制方法
2021-05-10张明光常剑华杨城铭刘子琳
张明光,常剑华,杨城铭,刘子琳
(1. 兰州理工大学 电气工程与信息工程学院,甘肃 兰州 730050; 2. 兰州理工大学 甘肃省工业过程先进控制重点实验室,甘肃 兰州 730050; 3. 兰州理工大学 电气与控制工程国家级实验教学示范中心,甘肃 兰州 730050)
随着科技的进步,我国电力电子技术飞速发展,MMC系统广泛应用于高压直流输电技术[1-5].相较于传统的换流器,MMC采用大规模级联的拓扑结构,因其能四象限运行、可扩展性强、开关频率高、易实现冗余设计等特点而在直流输电领域备受关注[6-14].然而MMC有利也有弊,其特有的拓扑结构使得子模块电容电压容易出现波动,在三相桥臂中出现环流,环流会造成桥臂电流失真,甚至损毁设备,破坏电网的稳定运行[15-17].因此,对MMC的环流进行抑制十分重要.
目前已有许多专家学者对MMC的相间环流作了大量研究.屠卿瑞等[17]推导了MMC的数学模型,利用二倍频旋转坐标把MMC的三相环流转变为两个直流量,并通过PI控制抑制环流但此方式必须进行相间解耦,使系统运算量变大.林环城等[18]提出了一种利用系统容量、子模块电容电压波动阈值以及最大瞬时调制比来确定功率运行区域的方法,并通过该方法实现了环流抑制.武文等[19]提出的方法可实现MMC出现故障时对环流的控制,利用一个虚拟电阻,使得子模块发生故障后的环流得到快速精确抑制,优化了整个系统的稳定性.吕泳庆等[20]为抑制MMC桥臂环流,提出了一种基于单相矢量的环流抑制策略,环流抑制器输出环流补偿量对MMC桥臂电压进行补偿,很大程度上减少了环流的二次谐波,但未考虑更高次的谐波.POU等[21]提出了一种能够跟踪环流参考的闭环控制方法,该方法通过输出电流的瞬时值和相位调制信号得到环流参考,在保持电压波动较低的情况下,电容电压的平均值保持在参考值,从而有效抑制环流.张芳等[22]提出了基于线性自抗扰的方法,无需精确的环流数学模型就能抑制环流二次谐波分量,但线性自抗扰系统参数繁多,结构较为复杂.杨晓峰等[23]对其他多种环流抑制方法的效果进行了对比,为了更彻底地抑制环流的二倍频分量,保证系统的稳定运行,设计了基于虚拟阻抗滑模原理的MMC环流抑制器.丁然等[24]基于正交虚拟矢量来抑制单相MMC系统的环流,通过分析单相MMC系统环流的特性,利用陷波器提取环流二倍频谐波分量,再引入1/4周期延时构造正交虚拟矢量,最终使用比例积分控制器来抑制MMC环流.屠卿瑞等[25]给出了MMC桥臂串联电抗在给定环流大小下的表达式,并在电抗取不同值下进行了仿真,结果表明在允许范围内增大桥臂串联电抗值可有效抑制环流,但抑制效果不够彻底,而且会增加系统损耗.任阳等[26]提出了基于PR和PI控制的环流抑制方法,但对环流的分析不够详细.
本文分析了MMC的环流成分,针对环流的偶次谐波,设计了二阶广义积分器来提取二次谐波分量,又设计了准比例谐振控制器来对谐波进行抑制,最后在PSCAD中进行了仿真,并与PI和增大桥臂串联电抗值的环流抑制方法作了对比,验证了所提方法的可行性.
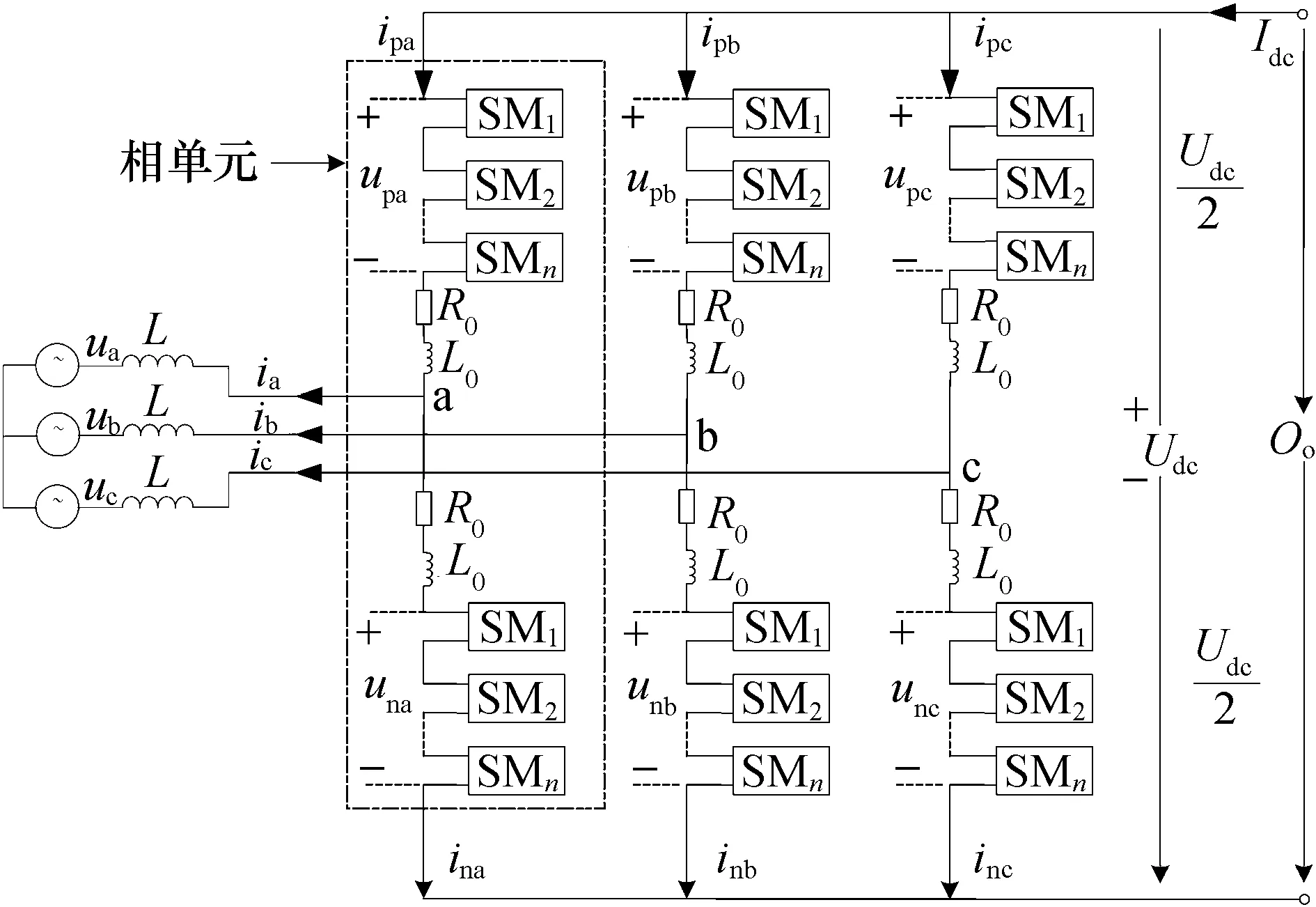
图1 MMC拓扑结构Fig.1 MMC topology
1 MMC工作原理及环流分析
1.1 MMC拓扑结构
MMC的拓扑结构如图1所示.MMC有三个相单元,每一相都有上下两个桥臂,桥臂上都含有数量相等的子模块,其中R0和L0分别为桥臂的等效损耗和桥臂等效电抗,upx、unx(x=a,b,c)为任一相上下桥臂电压,ux(x=a、b、c)为交流侧电压,Udc和Idc为直流电压和直流电流.
1.2 MMC环流分析
MMC的上下桥臂电压和电流可表示为
(1)
式中:U为交流侧输出电压幅值;I为其电流幅值;φ为功率因数角;δx为相角.以A相为例,MMC上下桥臂的调制函数为
(2)
其中m为调制比.
联立式(1,2),可得
(3)
式中:C是子模块电容值;ucpa和ucna为对应的子模块电容电压值.
由式(3)可得到,MMC子模块电容电压出现了基频和二倍频波动,则ucpa和ucna可表示为
(4)
式中:Ucref为子模块电容电压参考值;ε1和ε2分别为基频和二倍频分量的幅值;φ1和φ2分别为其相角.对式(4)两边求导,有
(5)
定义MMC内部环流为
(6)
联立式(2~4),可得A相桥臂电压和交流输出电压为
(7)

Udcε2cos(2ωt+φ2)
(8)
(9)
由式(8)可知,MMC任一相桥臂电压都会出现二倍频谐波,并且此谐波与电容器电压的波动有关.
当考虑二次谐波含量时,则MMC上下桥臂电流可修正为
(10)
联立式(2,10)可得[15,16]:
(11)
由式(11)可知,二倍频谐波环流会让子模块电容电压出现三倍频波动,而且其在上下桥臂中相位相反.同理,根据式(7)可知,子模块电容电压的三倍频波动会导致桥臂电压出现四倍频谐波,但其相位相同,进而产生四倍频环流,四次谐波环流使得子模块电容电压出现五倍频波动,进而在桥臂电压中出现六次谐波含量,导致六倍频环流的产生.综上可得出:MMC环流中只含有偶次谐波分量,且二次与四次谐波含量比重最大.
2 环流抑制策略研究
2.1 基于SOGI的谐波分量提取
由上节分析可知,MMC的环流中含有二次、四次以及更高次的偶次谐波,目前,利用控制器来对二倍频分量提取的方法应用越来越广泛.
为保证能有效准确地提取谐波分量,本文采用SOGI来提取二倍频分量,基于SOGI的多谐波滤波器(multiple harmonic filter,MHF)框图如图2所示.由图2可知,基于SOGI的多谐波滤波器由SOGI和积分环节组成,其传递函数为
(12)
式中:ωh为本文所采用MHF的谐波分离点;1/s环节可以放大直流分量,使其更方便地分离出来;MHF的动态性能则与kh有关.多谐波滤波器的基本思想是先采用SOGI来提取二倍频分量,通过负反馈环节与初始环流比较,环流中就只存在高频偶次谐波和直流成分,随后低通滤波环节将高频偶次分量过滤,得到直流量,利用负反馈环节将其输入初始环流,就可以得到谐波分量.

图2 多谐波滤波器Fig.2 Multiple harmonic filter
图3为MHF在kh变化时的bode图,kh为调节系数,与MHF的动态性能有关.过小的kh会减小低于谐波分离点频率处的阻尼,而过大的kh会增大低频处的阻尼,也会对谐波分离点后段频率处的增益产生影响,使谐波分离的精确度降低.考虑以上原因,本文选择kh=50进行仿真.
2.2 环流抑制控制器设计
理想PR可以实现交流量的无静差跟踪,但其带宽过窄,当频率发生变化,其在谐振频率点的增幅很小.为了提高系统稳定性,更有效准确地消除谐波,本文利用准PR控制器来实现环流抑制.其传递函数为

(13)

图3 多谐波滤波器bode图
其中:kp为比例系数;kr为谐振系数;ωr为谐振频率;ωr=kω0,rad/s;ωc为截止频率.
准PR的优点在于扩大了带宽,频率的变化对其影响小,使控制器更加稳定.
当s=jω时,准PR控制器的频率特性为
(14)
当ω=ωr时,其幅值为kp+kr,相位角位移为0,可以实现特定频率的无静差跟踪.则准PR控制器框图如图4所示.准比例谐振控制器的ωc对控制器效果有较大的影响,图5为ωc取值分别为1、π、10时准PR控制器的bode图,由图5可知,随着ωc的变大,控制器的带宽以及在谐振频率附近的增益都相应地增大,可以清晰地看出,ωc对增益的影响更为明显,ωc与增益成正比关系.考虑到增益和带宽两方面的因素,本文取ωc=π rad/s.
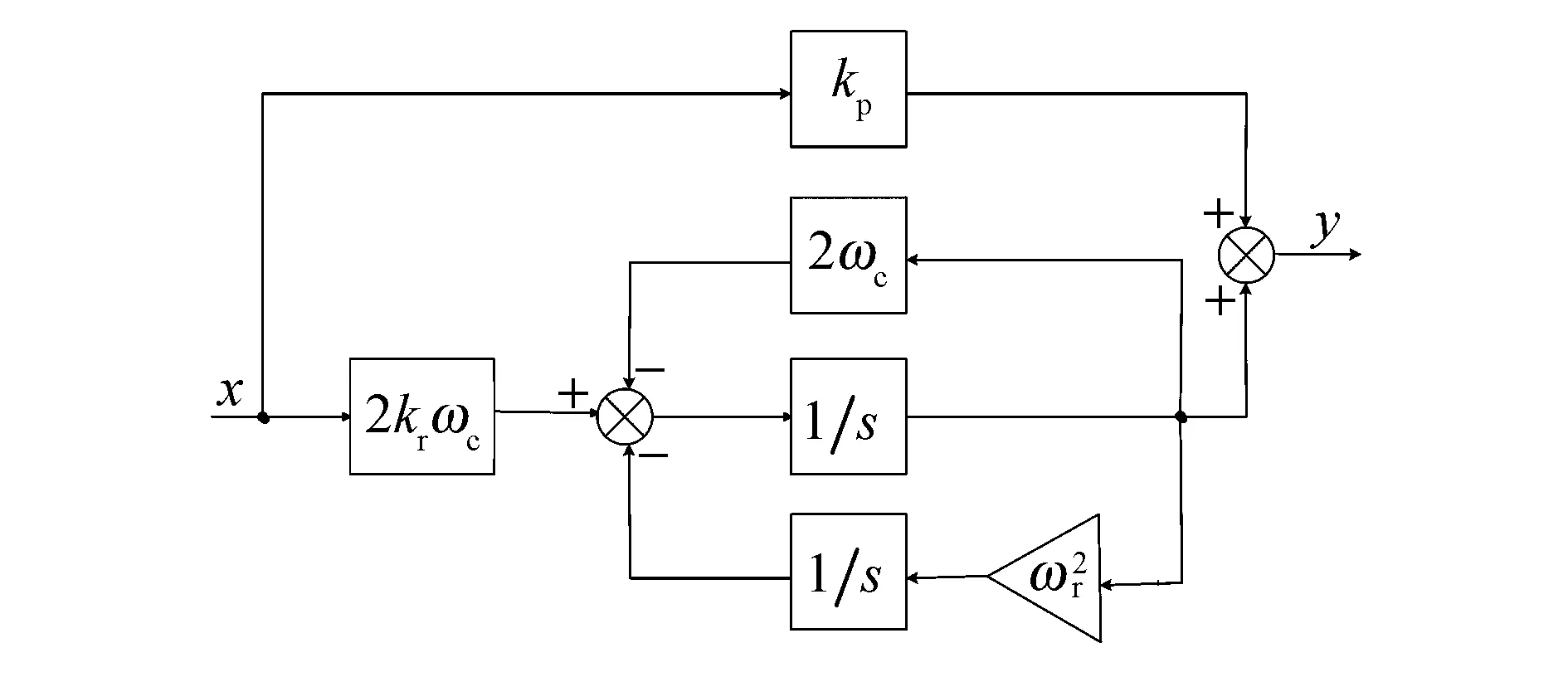
图4 准PR控制器框图
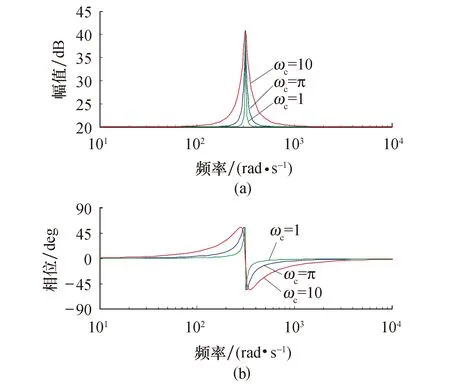
图5 ωc变化时准PR控制器bode图 Fig.5 Bode diagram of quasi PR controller when ωcchanges
环流含有二次、四次和更高次的偶次谐波,本文主要控制目标为二次和四次谐波,采用MHF的环流抑制整体结构如图6所示,图中ω0为基波频率,环流izx_diff通过MHF分离出交流环流分量,经过准PR控制器调节,生成了环流的补偿量usumx,最后作用到调制环节参与控制.

图6 环流抑制整体框图
3 仿真验证
为了验证所提出的环流抑制方法,在PSCAD中搭建21电平MMC-HVDC模型,仿真模型如图7所示,仿真参数见表1.系统刚启动,环流抑制器未作用,到4 s时投入环流抑制器,仿真波形如图8~13所示.

图7 MMC-HVDC模型Fig.7 MMC-HVDC model
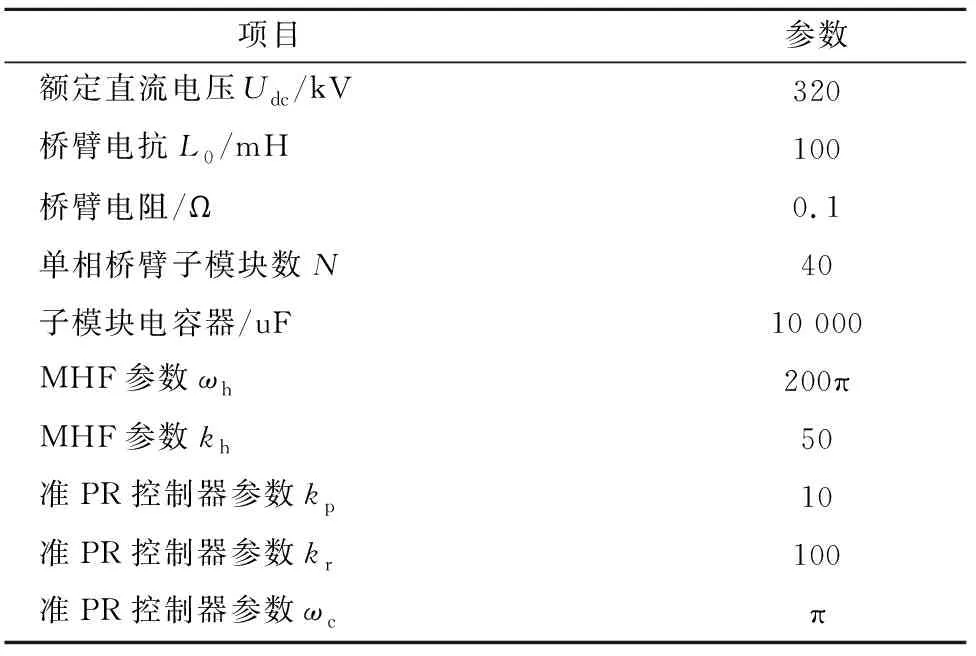
表1 仿真系统主要参数
仿真时,MMC系统送端采用定直流电压和定无功功率控制,受端采用定有功功率和定无功功率控制,调制策略为最近电平逼近调制.0~4 s未投入所设计的控制器,t=4 s时该控制器投入运行.MMC上桥臂电流和子模块电容电压仿真波形如图8和图9所示,可以观测到,在环流抑制器未作用于MMC时,二者波形波动较为严重,且存在畸变,一定程度上影响了系统的稳定运行.4 s后,桥臂电流和子模块电容电压波动大幅度减弱,且波形畸变控制效果明显,不平衡状况改善.图10为A相上桥臂电流傅里叶分析结果,4 s前THD为40.83%,4s后THD为17.66%,表明该方法可以大大减少其谐波含量.
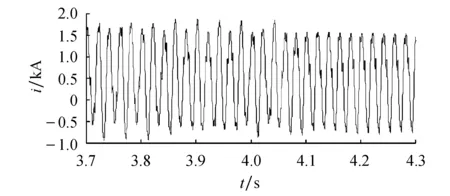
图8 A相上桥臂电流Fig.8 Upper bridge arm current of phase A
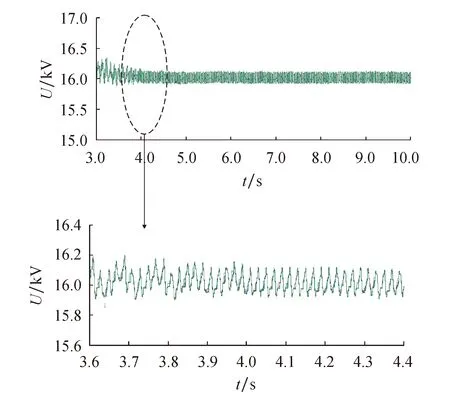
图9 子模块电容电压Fig.9 Capacitor voltage of submodule
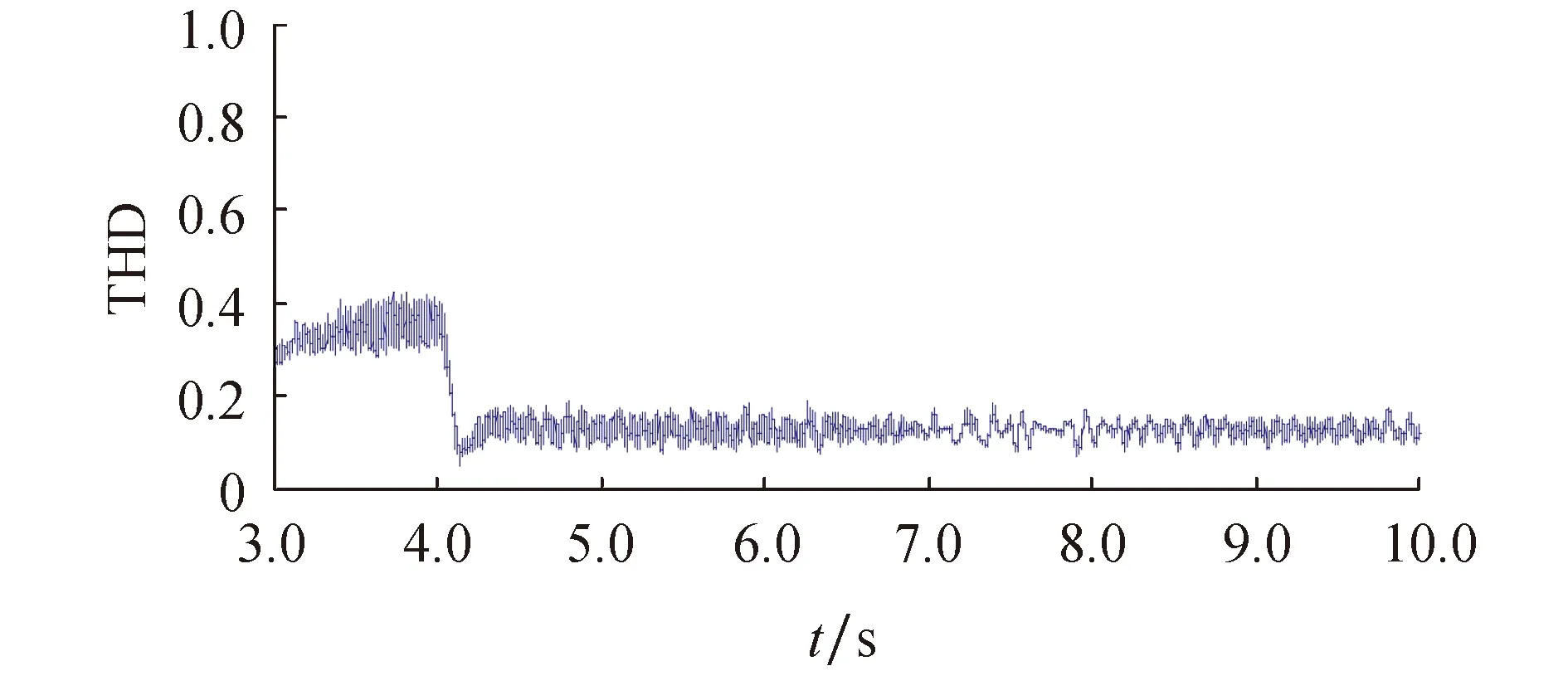
图10 A相上桥臂电流谐波含量Fig.10 Harmonic content of bridge arm current in phase A
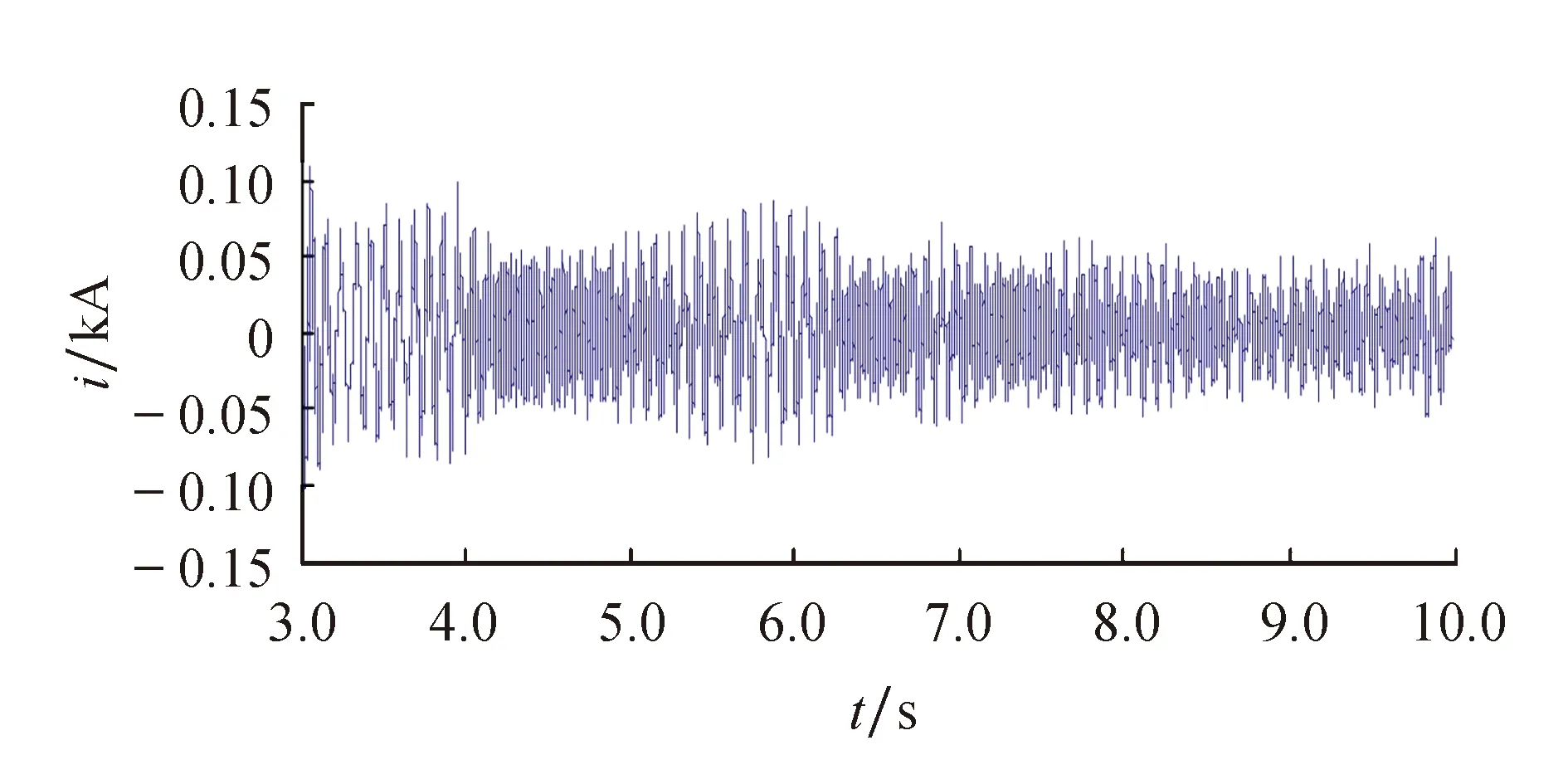
图11 增大桥臂电抗值下的环流抑制仿真波形Fig.11 Simulation waveform of circulation suppression under increasing bridge arm reactance
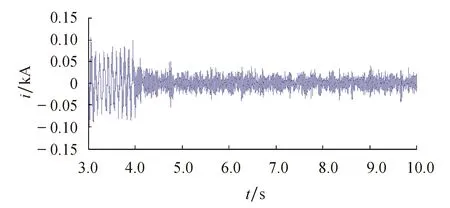
图12 PI控制下的环流抑制仿真波形

图13 基于SOGI的环流抑制仿真波形Fig.13 Simulation waveform of circulation suppression based on SOGI
图11为文献[25]提出的适当增大桥臂串联电抗值下的环流波形,图12为文献[17]所提出的PI控制下的环流波形,图13为采用本文提出的环流抑制器的环流仿真波形,可以看出在增大桥臂串联电抗值或投入相应地环流抑制控制器之后,环流都得到了一定程度上的抑制,但是通过对比发现,基于SOGI的环流抑制方法对环流的抑制效果更加明显,环流波动更小,表明了该方法有效可行.
4 结论
本文介绍了MMC的基本结构,推导了MMC的环流产生机理,指出环流中含有二次、四次以及更高次的偶次谐波,提出了一种基于SOGI的环流抑制方法,通过MHF分离出谐波分量,设计了准PR控制器来抑制环流.在PSCAD软件中对所提方法进行仿真,并与其他两种环流抑制方法作了对比,结果表明基于SOGI的环流抑制方法能更有效地抑制环流,桥臂电流和子模块电容电压波动明显减弱,波形失真也得到一定程度的改善,验证了所提出环流抑制方法的有效性.
