基于神经网络的液压混合动力车辆蓄能器SOC状态预测研究
2021-05-10吴相稷
周 鹏,吴相稷
(1.昆明冶金高等专科学校电气与机械学院,云南 昆明 650033;2.昆明理工大学交通工程学院,云南 昆明 650500)
0 引 言
液压混合动力汽车是将传统内燃机和蓄能器[1-2](Accumulator,ACC),通过串联或并联的方式,耦合在一起驱动新型混合动力汽车。其中动力源蓄能器的荷压状态(State of Charge,SOC)是用于显示蓄能器ACC剩余压力的指标参数。该参数在车辆运行时,无法直接用仪表采集到,目前多是通过对相应物理参数的测算,并建立相关数学模型估算得出。蓄能器作为辅助动力源,其运行工作受限于诸多不稳定因素(如环境温度、振动等)影响,呈现非线性复杂特征。故能够精确且快速地预估出蓄能器的荷压参数,考量液压混合动力汽车的动力性和燃油经济性,实现对发动机和蓄能器的最优能量分配,有着重要的现实意义。
本文将通过选定的某重型串联液压混合动力车辆的参数,采用神经网络控制,对辅助动力源蓄能器的荷压状态(SOC)进行精确估计,通过对充放压的数据进行多次训练和模拟实验,应用Matlab/Simulink进行验证试验,确保所设计算法控制可靠、有效。
1 神经网络控制
神经网络算法有着较好的非线性适应能力[3-4],通过对数据的并行处理,实现对控制对象的鲁棒稳定性和兼容性,其非线性特点可以对多参数、多变量进行计算,不再需要对被控对象的准确数学模型;通过对输入变量控制,及时输出结果,实现其较强的容错性和解决问题能力。
BP神经网络,作为一种无反馈、层内(输入层、隐含层、输出层)未互联结构,也有的是采用多层次设计结构,通过对误差的反向控制,进行神经网络训练。典型的一个隐含层BP神经网络结构如图1所示。
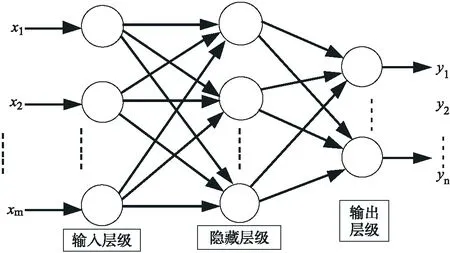
图1 一个隐含层BP神经网络典型拓扑结构Fig.1 A typical topology of BP nrural network with hidden layer
图1中,输入变量x1、x2、…、xm是控制算法模型的输入层;输出变量y1、y2、…、yn是控制算法模型的输出层。
依据神经网络算法,输入、输出对应关系如下:
(1)
(2)
(3)
(4)
式(1)~(4)中,ωij,ωjk为连接各神经元权值调节各个输入量的占重比;θk表示该神经元的阈值;η为该神经网络的设定学习速率;误差、修正系数由梯度下降法训练计算得出;ΔE是误差,tk是期望输出。
2 SOC状态神经网络预测模型
2.1 输入层
神经网络控制[3,5-6],由多个神经元相互关联,这些简单的神经元内部连接,形成网络控制系统。本文选取节气门踏板开度、车速、车速变化率(加速度)、模式选择开关共4个参数作为输入层级的变量。神经元m=4。
2.2 隐藏层
神经网络控制的隐藏层神经元数目,一般依据下述算法经验公式得出。常见经验公式有3个,它们之间没有本质区别,所得神经元个数一般无实质性差别。
(5)
l=log2m
(6)
(7)
式(5)~(7)中,α可取1~10之间的自然数。
2.3 输出层
本文中,输出参数为液压蓄能器的荷压状态(SOC),可知在输出层中的神经元数目为荷压状态SOC 1个。其神经网络控制模型如图2所示。
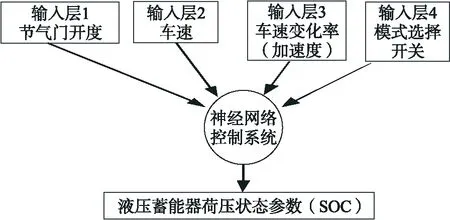
图2 液压混合动力汽车神经网络控制 液压蓄能器荷压状态SOC控制结构 Fig.2 Neural network control of hydraulic hybird electric vehicle SOC control structure for load state of hydraulic accumulator
3 仿真模型和训练数据
3.1 车辆运动的数学模型
建立车辆动力学模型,研究汽车在路面上行驶时,存在克服的行驶阻力(Ft),有滚动阻力(Ff)、空气阻力(Fw)、坡度阻力(Fi)和加速阻力(Fj)
由车辆驱动力—行驶阻力平衡方程可知
Ft=Ff+Fw+Fi+Fj
(8)
Ff=mgfcosθ
(9)
(10)
Fi=mgsinθ
(11)
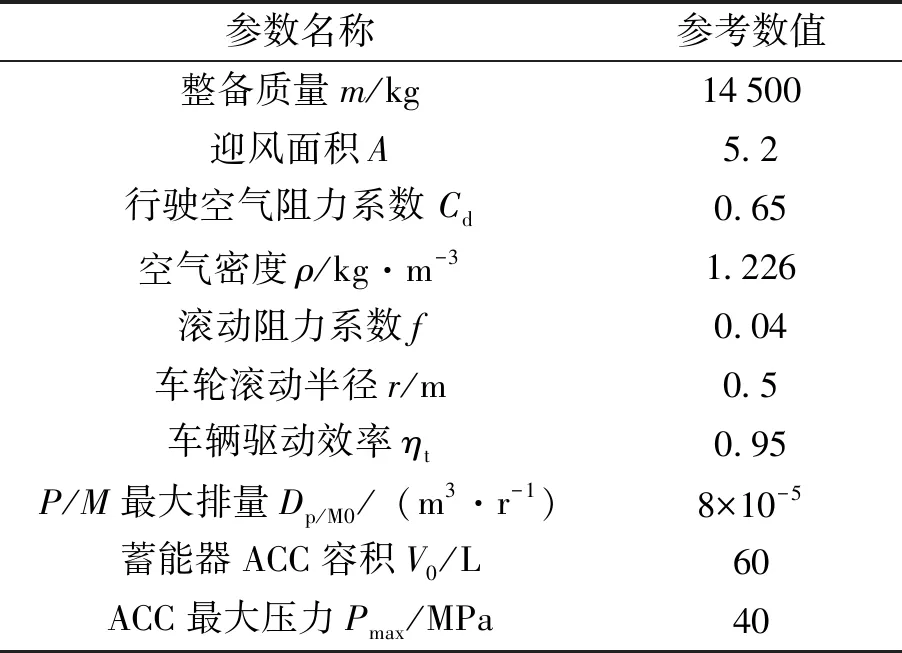
表1 所选液压混合动力汽车主要参数
式(8)~(11)中,相应参数涵义在表1仿真参数中给出。
3.2 仿真参数
本文中,选择某重型汽车改装的液压混合动力车辆为研究对象,该车的基本参数见表1。
所选液压混合动力汽车主要参数为验证液压蓄能器荷压状态(SOC)的最佳充放压参数,每次仿真时,均将蓄能器充压至满格100%。如此,可使得在加速、急加速、上坡、大负荷等工况,优先由蓄能器提供车辆行驶所需能量,降至蓄能器最低充压数值时,再由发动机提供车辆所需能量。
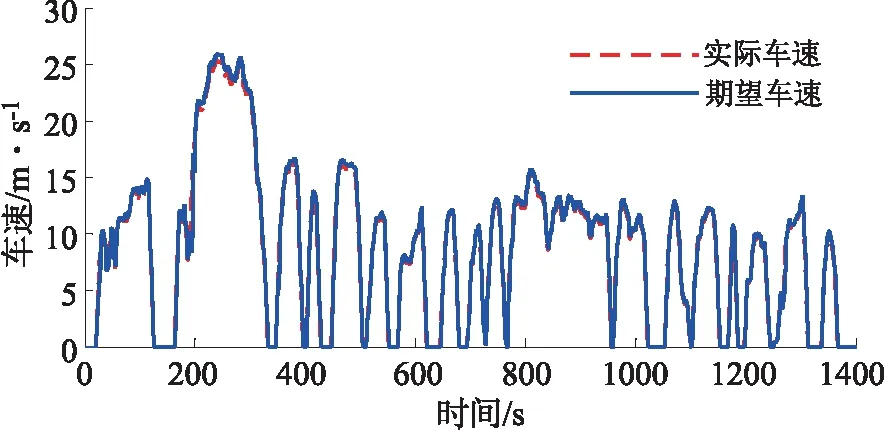
图3 实际仿真车速与期望车速高度切合 (在荷压状态开启值为0.2,关闭值为0.5时)Fig.3 The actual simulated speed is consistent with the expected speed(In the state of load, the opening value is 0.2 and the closing value is 0.5)
4 仿真验证分析
本文选用国际通用的城市工况FUDS作为仿真循环工况,来验证所设计神经网络控制策略的适应性,在仿真软件Matlab/Simulink中搭建模型,通过一系列参数的输入、处理,最后得到相应的处理结果。
经过多次训练,得出液压蓄能器ACC的荷压状态开启值为SOCstart=0.2,荷压状态关闭值SOCstop=0.5,此时发动机与蓄能器的工作协调最好,相应的参数指标如图3所示。
图4是期望车速和实际车速的关系及相应车速误差值。从图4可以看出,此车速误差值为[-1,1],实际车速能够完全跟踪期望车速,说明所设计选取的蓄能器SOCstart=0.2,SOCstop=0.5,能够满足实际需求。
图5、6所显示的是FUDS整个仿真中,蓄能器SOC的适应循环工况变化和车辆的工作模式的变化。图7中车辆运行至200 s左右时,蓄能器SOC和工作模式迅速切换,是由于循环中在该时段内车速变化较急,蓄能器SOC在开启值SOCstart和关闭值SOCstop之间跳跃,在极少数的时间内SOC超出了这个范围,是车辆在此时急加速所致。
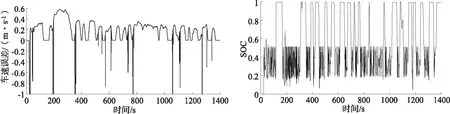
图4 期望车速与实际车速误差值 图5 蓄能器SOC适应循环工况FUDS的曲线 Fig.4 The error between the expected speed and the actual speed Fig.5 Curve of accumulator SOC adapting to cycle FUDS
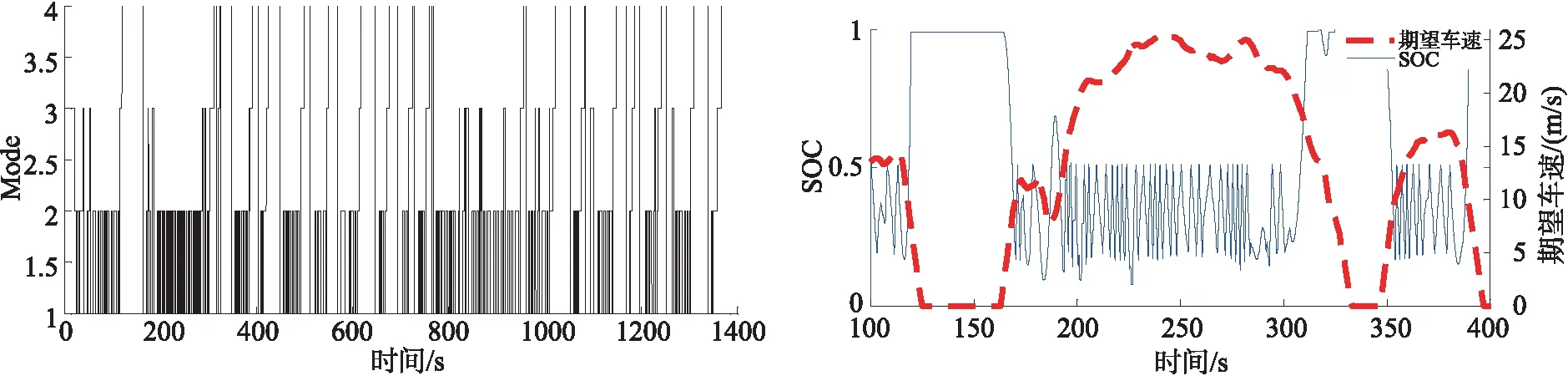
图6 FUDS循环工况下,蓄能器SOC、发动机和车辆工作模式的选择 图7 FUDS仿真工况100~400 s时,蓄能器SOC与期望车速适应Fig.6 Selection of working modes of accumulator engine and vehicle under FUDS cycle Fig.7 When the simulation condition of SOC, FUDS is 100~400 s,the accumulator SOC adapts to the expected speed
5 结 论
本工作根据液压混合动力车辆中辅助动力源液压蓄能器ACC的荷压状态参数(SOC),较难在实际中获取,建立基于神经网络控制的液压蓄能器关键参数预估模型。选择某重型串联液压混合动力车辆为研究对象,通过对数据的多次模拟验证,得出液压蓄能器ACC的荷压状态开启值为SOCstart=0.2,荷压状态关闭值SOCstop=0.5时,发动机与蓄能器的工作协调最好。对比分析验证表明:车辆实际车速可以跟上期望车速需求,误差为[-1,1];蓄能器工作曲线和工作模式可以适应FUDS仿真循环的要求;急加速等特需工况,SOC值的响应较好,达到了预期效果,具有一定的理论推广意义。
